
船舶电力推进直接转矩与转速复合控制
2011-03-23 07:36张桂臣马捷
哈尔滨工程大学学报 2011年5期
张桂臣,马捷
(上海交通大学 海洋工程国家实验室,上海 200030)
综合全电力推进(IFEP)是现代船舶电力推进研究方向之一[1],IFEP系统在海洋工程船、客船、特种用途船等船上的广泛应用一直是研究的热点[2].推进电机是IFEP的核心设备与研究重点之一[3-5],并且其控制技术是船舶电力推进的关键技术[6-7].目前,船舶电力推进领域的理论研究、实验研究与仿真验证都非常重视并取得较多研究成果[3-10].然而,IFEP为MIMO非线性复杂系统,推进电机与螺旋桨之间相互影响严重且难以精确地描述[11].文献[6-9]用两台异步电动机对拖试验模拟船舶电力推进的功能,其主要控制目标为推进电机的转速,但其控制策略中没有利用螺旋桨的动态性能.频繁操纵推进电机时,尤其是遭遇恶劣海况情况下,这将导致推进系统的转矩、转速和功率的严重振荡.
本课题采用SIEMENS最新技术SIMOTION,由统一的工程开发软件SCOUT和多种硬件平台SINAMICS,建立全新的船舶电力推进Siemens-Schottel-Propulsion(SSP)半实物仿真系统.重点分析电力推进的转矩、转速与功率动态特性,并应用于推进电机直接转矩与转速的复合控制,获得精确和平滑的功率与转矩控制,最小的转速脉动,意味着更少的机械磨损、导致更低的维护成本.
1 SIMOTION船舶电力推进系统设计
SIEMENS SIMOTION控制系统及异步电动机组成吊舱式SSP电力推进半实物仿真系统[12],如图1所示,该系统能实现船舶电力推进的运动控制、逻辑和运算功能,提供测试和验证平台.在SIMOTION电力推进系统仿真平台上可进行推进电机操纵及其复合控制试验.
图1中的主要部件如下:
1)SCOUT是电力推进控制系统的软件平台,提供统一的功能导向的自动化控制及其编程.
2)WinCC Flexible是创建和编辑SSP操作界面HMI的工程软件.
3)SITOP:24VDC电源模块.
4)D425:电力推进系统的运动控制核心(CPU).
5)SINAMICS双轴电机模块VECTOR:一个轴驱动吊舱推进电机,实现复合控制;另一个轴驱动回转电机,进行定位控制.
6)SINAMICS单轴电机模块VECTOR:控制与推进电机对拖的负载电动机,模拟螺旋桨,它采用的是转矩控制.
7)模块SMC10处理编码器信号,将SSP的回转转速、位置值经DRIVE-CliQ实时传给控制单元.
8)电抗器与电源滤波器消除谐波干扰.
9)推进器由SSP、回转电机、推进电机和负载电机组成.
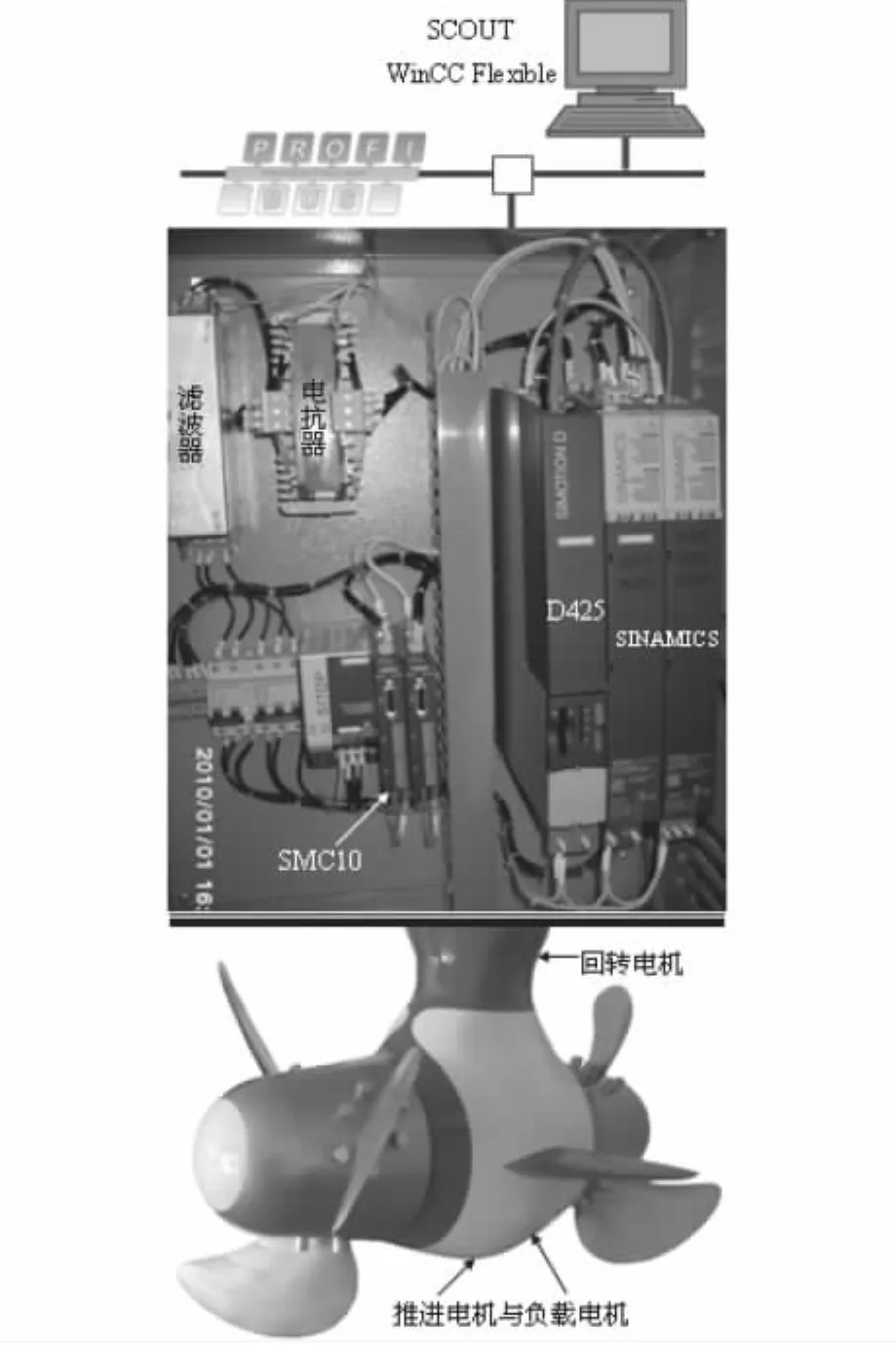
图1 SIMOTION船舶电力推进仿真系统Fig.1 Simulation of the marine electric propulsion system based on SIMOTION
2 船舶电力推进系统的动态特性
SSP的推进电机由SINAMICS电机模块驱动,推进电机的转子轴直接驱动螺旋桨.由螺旋桨的推力Fp、转矩Tp和功率Pp表达式[11],得出SSP转速:
式中:n1、n2和n3为SSP转速的不同表达形式.海水密度ρ=1 025 kg/m3,KT、KF分别是无因次的转矩系数、推力系数,D是螺旋桨直径.
由式(1)~(3)得推进电机复合控制转速为

式(4)复合转速Σ n包含了SSP的推进特性.
由式(1)、(2)得

由式(2)、(3)得

由式(1)~(3)得

于是,由式(5)、(7)得SSP的复合推力

由式(2)、(6)得SSP的复合转矩

SSP的动态平衡式为
式中:Is为SSP的转动惯量,Tm是推进电机转矩,Ts是SSP的静态摩擦转矩,ω=2πnm和nm分别是推进电机的角速度和转速,kω是线性摩擦系数,τm是推进电机时间常数.Tsp为推进电机的转矩指令,SIMOTION电力推进采用直接转矩控制(DTC)技术,不需速度和相位角编码器,可降低维护成本和确保高的可靠性.
Σ n、Σ F、Σ Tp的仿真结果如图2、3所示:
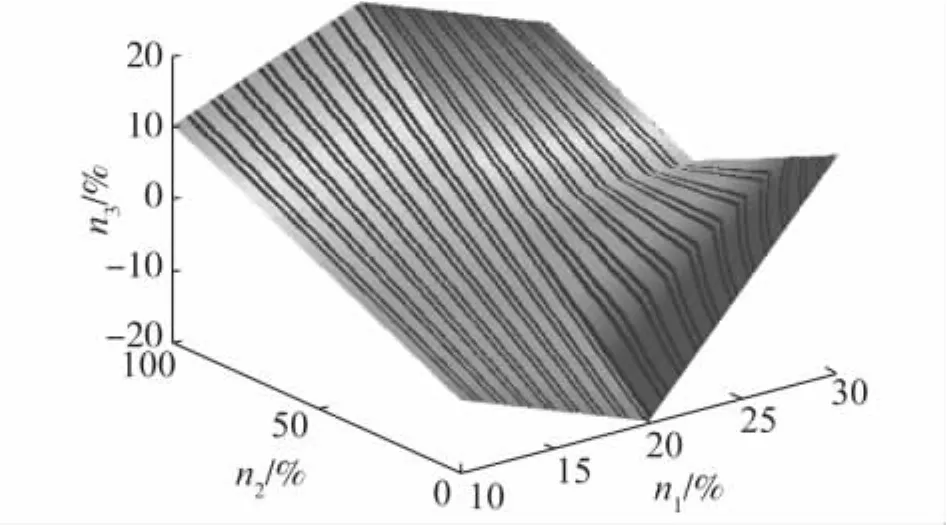
图2 n1、n2和n3的仿真结果Fig.2 The simulation result of n1,n2and n3
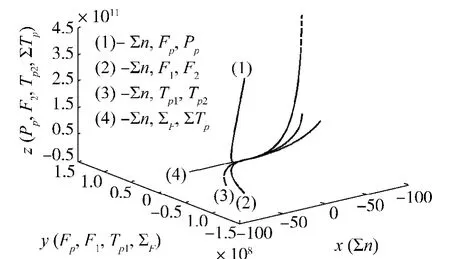
图3 复合算法仿真结果Fig.3 The simulation result of the hybrid algorithm
图2、3中的参数全部刻度化为无量纲的标准值,这样处理方便,可在同一坐标下表示多个变量,便于比较分析不同算式之间的结果.参数 KF= 0.393、ρ=1.025、D=4、KT=0.0655.图2中的Fp、Tp和Pp由式(1)~(3)分别对应于n1、n2和n3,n1、n2和n3之间为局部线性关系,不同范围段的增益是变化的,表明推进动力Fp、Tp和Pp对Σ n的影响程度不同.图3中,Fp和 Pp、F1和 F2、Tp1和Tp2、Σ F和Σ Tp随Σ n的变化关系,具有非线性特性.
3 推进电机的复合控制
SSP推进电机速度反馈控制算法为

式中:kp和ki是PI的增益系数.其中,e=[nset(t+ 1)-Σ n(t+1)]-[nset(t)-Σ n(t)],nset为推进电机的设定转速.
由式(5)、(8)得推进电机的转矩前馈控制算法为

由SSP的推力Fp、转矩Tp和功率Pp表达式[11]可得推进电机的功率前馈控制算法为

则
式中:Tm1、Tm2和Tm3分别对应推进电机的速度控制、转矩控制和功率控制的指令转矩,Pm是推进电机功率.
综合推进电机的转速-转矩-功率控制策略,由式(13)、(14)和(16)得
式中:Σ Tc为复合控制指令,权重函数α(Σ n)为

式中:k、λ和γ为大于0的常数,且满足以下条件

α(Σ n)仿真结果如图4所示.
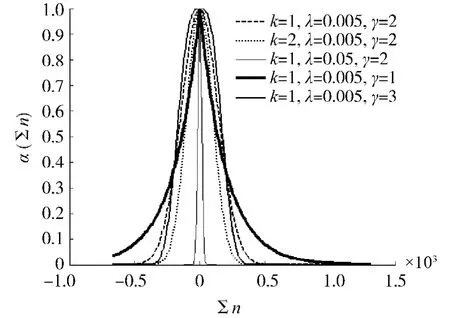
图4 α(Σ n)的仿真结果Fig.4 The simulation result of α(Σ n)
图4中,参数k、λ和γ的不同取值,权重函数α(Σ n)曲线的形状一致.k越大,权重函数曲线基宽变窄;λ越大,权重函数曲线越瘦,基宽变小,峰顶变尖,则选择性好;γ越大,权重函数曲线越胖,基宽变小,峰部平坦,则稳定性好.
4 结果分析
建立图1所示的基于SIMOTION船舶电力推进模拟系统,推进电机和模拟螺旋桨电机均为三相异步电动机,可处于电动状态,也可处于再生发电状态,且都工作在稳定区域.电机全负荷运行时,在线检测结果如图5所示.
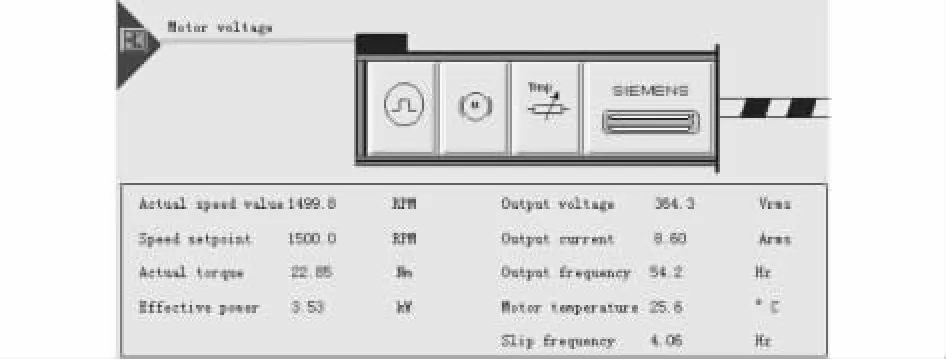
图5 电机在线参数检测Fig.5 Motor parameter on-line detecting
分别以速度控制、转矩控制和功率控制的试验结果如图6~8所示.
图6为推进电机转速控制结果,图6(b)所示的转矩大幅度波动;图7为推进电机转矩控制结果,图7(a)所示的转速波动幅度较小;图8为推进电机功率控制结果,图8(a)和图8(b)所示的转速和转矩波动幅度最小.显然,转矩控制和功率控制的效果要比转速控制的效果好,而功率控制的效果最好.
图6~8表明,采用功率控制策略时,由于推进电机转速和转矩的乘积决定了其功率大小,根据推进负荷和海况,同时控制推进电机的转速和转矩,保持功率稳定,可获得最佳的控制效果,图8所示,转速与转矩变动平滑,脉动最小.功率变化时,转速和转矩可都增大、都减小或一个增大而另一个减小,两者变动的幅度也不同.因此,基于SIMOTION的船舶电力推进直接转矩与转速复合控制的策略是理想的、灵活的.

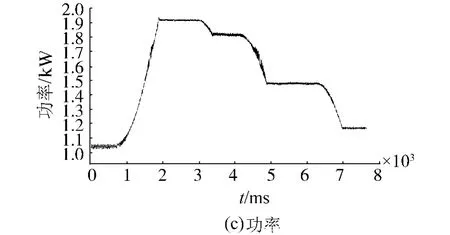
图6 速度控制试验结果Fig.6 The test result of speed control
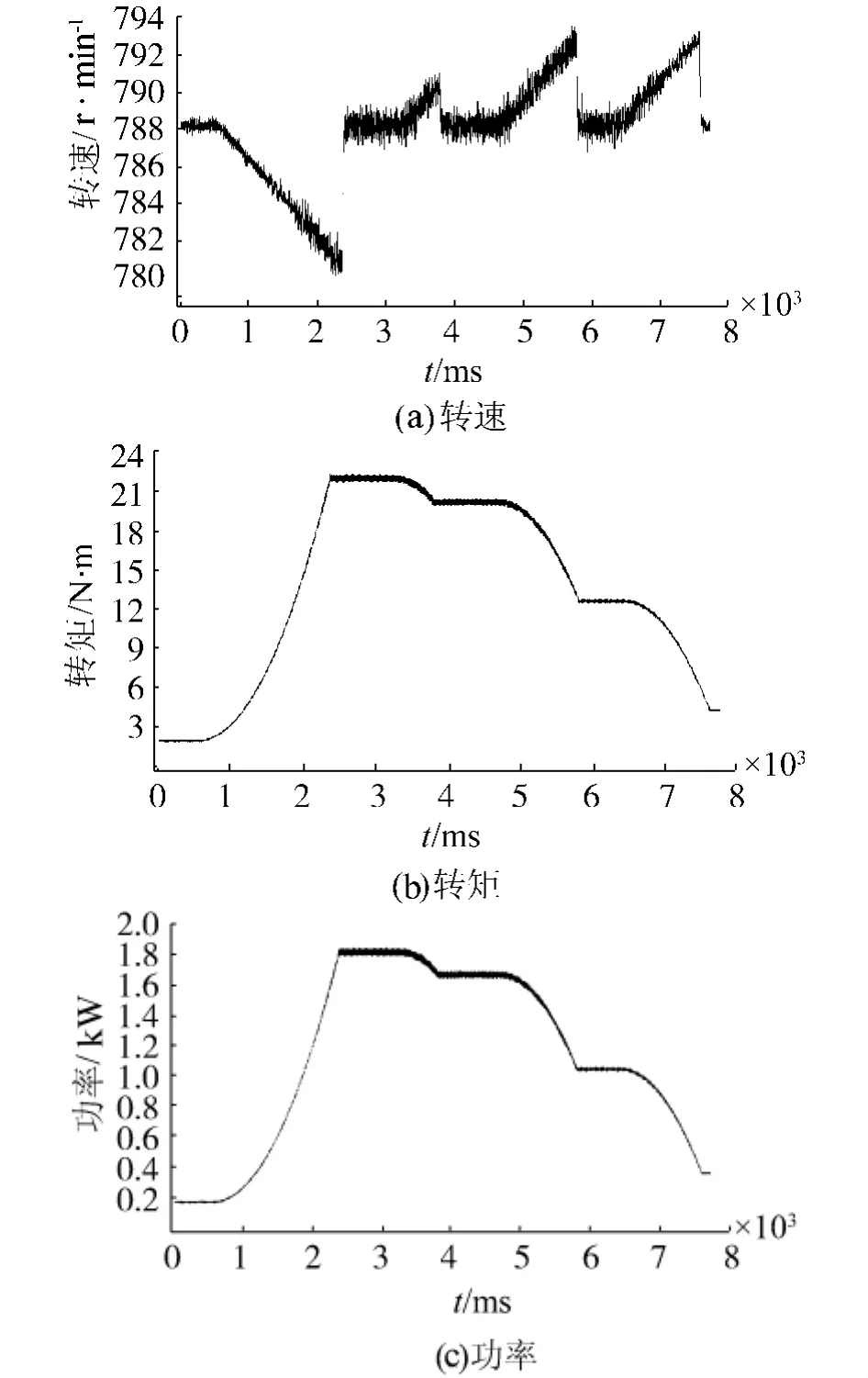
图7 转矩控制试验结果Fig.7 The test result of torque control

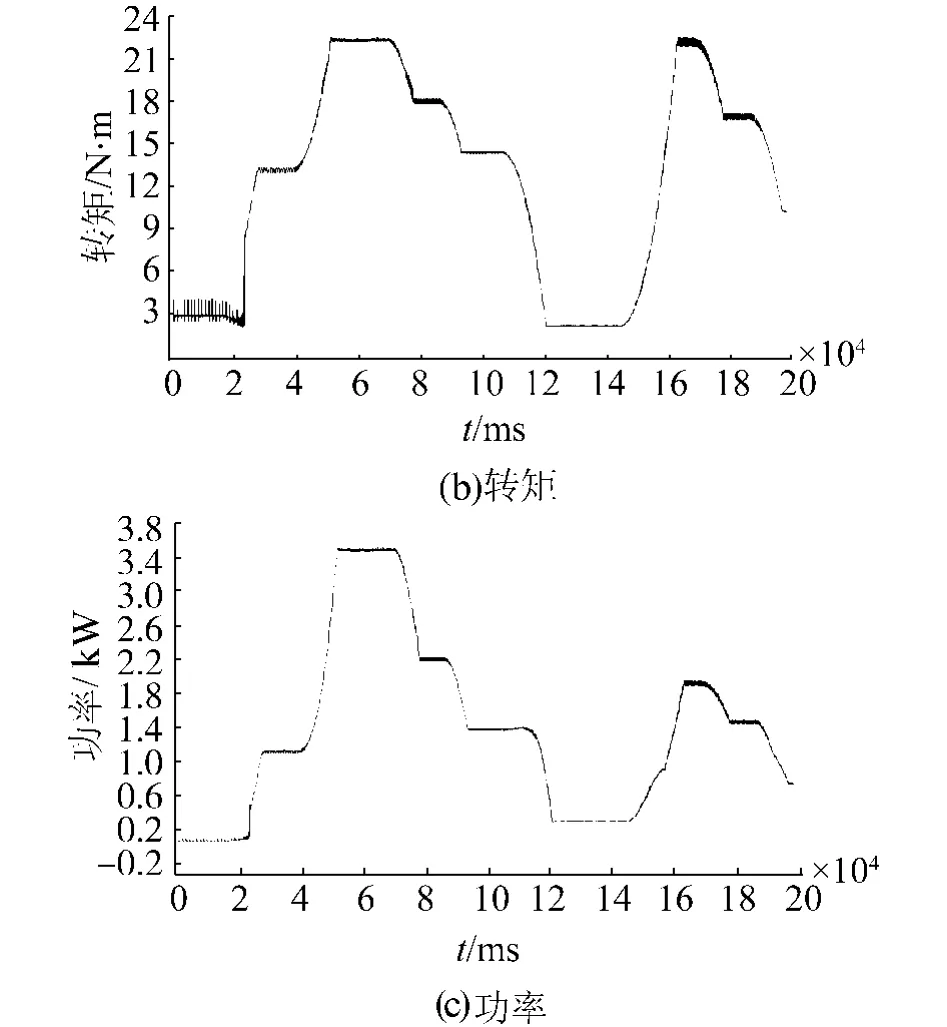
图8 功率控制试验结果Fig.8 The test result of power control
5 结束语
在分析船舶电力推进SSP动态特性的基础上,提出了推进电机直接转矩与转速的复合控制算法,利用SIEMENS最新技术SIMOTION,建立了电力推进SSP模拟系统.进行了船舶电力推进的速度控制、转矩控制和功率控制的试验研究,并对这3种控制策略进行了比较分析,得出了功率控制最好的结果.下一步工作将在SIMOTION船舶电力推进模拟试验台上,进行摩擦转矩与惯性矩预测估计,应用于复合控制的前馈补偿研究,进一步提高船舶电力推进的鲁棒性能.
[1]APSLEY J M,GONZALEZ-VILLASENOR A,BARNES M,SMITH A C.Propulsion drive models for full electric marine propulsion systems[J].IEEE Transactions on Industry Applications,2009,45(2):676-684.
[2]ERICSEN T,HINGORANI N,KHERSONSKY Y.Power electronics and future marine electrical system[J].IEEE Transactions on Industry Applications,2006,42(1):155-163.
[3]王步来,顾伟,褚建新.船舶电力推进用双三相永磁同步电动机建模[J].哈尔滨工程大学学报,2009,30(4): 347-352.
WANG Bulai,GU Wei,CHU Jianxin.Modeling a dual three-phase permanent magnet synchronous motor for electrical propulsion of ships[J].Journal of Harbin Engineering University,2009,30(4):347-352.
[4]张敬南.船舶电力推进六相同步电动机控制系统研究[D].哈尔滨:哈尔滨工程大学,2009:1-112.
ZHANG Jingnan.Six-phase synchronism motor control system for the ship electric propulsion[D].Harbin:Harbin Engineering University,2009:1-112.
[5]陶果.新型横向磁场永磁电力推进电动机的研究[D].北京:清华大学,2007:1-81.
TAO Guo.Studies on novel transverse flux permanent magnetic propulsion motor[D].Beijing:Tsinghua University,2008:1-81.
[6]薛士龙.船舶电力推进仿真装置及其关键技术的研究[D].上海:上海海事大学,2006:9-96.
XUE Shilong.Marine electric propulsion simulator and its research on key technologies[D].Shanghai:Shanghai Maritime University,2006:9-96.
[7]高海波.船舶电力推进系统的建模与仿真[D].武汉:武汉理工大学,2008:1-180.
GAO Haibo.Modeling and simulation for marine electrical propulsion system[D].Wuhan:Wuhan University of Technology,2008:1-180.
[8]刁利军,沈茂盛,林文立.电力推进负载模拟系统原理分析和实现[J].电工技术学报,2009,24(7):70-75.
DIAO Lijun,SHEN Maosheng,LIN Wenli.Principle analysis and realization of electric propulsion load simulation system[J].Transactions of China Electrotechnical Society,2009,24(7):70-75.
[9]贺慧英,沈建清.舰船电力推进负载试验技术研究[J].哈尔滨工程大学学报,2009,30(4):383-389.
HE Huiying,SHEN Jianqing.Experimental techniques for marine electrical propulsion[J].Journal of Harbin Engineering University,2009,30(4):383-389.
[10]赵敏.基于混沌理论的电力推进船舶电力负荷预测[D].大连:大连海事大学,2008:1-99.
ZHAO Min.Electric propulsion ship load foercasting based on chaos theory[D].Dalian:Dalian Maritime University,2008:1-99.
[11]SORENSEN A J,SMOGELI O N.Torque and power control of electrically driven marine propellers[J].Control Engineering Practice,2009,17(9):1053-1064.
[12]张桂臣.复合误差模型自适应船舶控制系统的应用研究[D].大连:大连海事大学,2009:147-159.
ZHANG Guichen.The study and application of hybrid error adaptive model for ship control systems[D].Dalian: Dalian Maritime University,2009:147-159.
猜你喜欢
遥测遥控(2022年1期)2022-02-11
航空发动机(2020年3期)2020-07-24
四川冶金(2018年1期)2018-09-25
兰台世界(2017年10期)2017-06-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2015年21期)2015-04-09
电机与控制应用(2015年3期)2015-03-01
中国舰船研究(2014年1期)2014-05-14
组合机床与自动化加工技术(2014年10期)2014-03-01
现代防御技术(2014年5期)2014-02-28
