髋关节假体脱位分析软件的设计与开发
2011-01-05 05:18:40季文婷王成焘曾祥森
生物医学工程学进展 2011年3期
周 海,季文婷,王成焘,曾祥森,,丁 彪
1.上海交通大学机械与动力工程学院生物医学制造与生命质量工程研究所(上海,200240)
2.上海市医疗器械检测所(上海,201318)
髋关节假体脱位分析软件的设计与开发
周 海1,季文婷1,王成焘1,曾祥森1,,丁 彪2
1.上海交通大学机械与动力工程学院生物医学制造与生命质量工程研究所(上海,200240)
2.上海市医疗器械检测所(上海,201318)
目的 研发了髋关节假体脱位分析软件。软件基于ADAMS/VIEW软件进行二次开发,能够可视化的构建三维参数化的髋关节假体模型,模型能够模拟假体的六种运动。应用此软件可以为病人更好的选择和植入假体,评估各种髋关节假体的安全活动范围,用来设计新的关节假体。
髋关节假体;脱位;全髋关节置换术
0 引言
脱位是全髋关节置换术(THA)后一个主要的、严重的并发症[1-3]。术后髋关节活动度的减少可能会引起假体间的相互碰撞,从而增加发生半脱位和脱位的几率。而在临床中假体选择的合理性和安放位置的优化对于病人来说是能否达到所需活动度的主要因素。
我们建立了一个用于计算THA后髋关节假体理论活动度,进一步能够研究分析髋关节假体脱位参数化的三维仿真软件。该软件不仅要集成参数化建模、运动仿真和可视化功能,而且要能够尽可能考虑到所有能参数化的临床影响因素。使临床医生可以在术前利用这一工具为病人选择适合的假体并进行植入位置的优选,且可以为病人考虑些个性化的因素,术后进行活动度的评估。利用该软件结合各种运动测量结果,能够评估不同参数人工髋关节性能。
1 髋关节假体脱位分析软件
建立髋关节假体脱位分析软件可以进行参数化的建模,并能进行屈曲与后伸、外旋与内旋、外展与内收运动的动态仿真,同时可以快速准确地得到不同参数的人工全髋关节的理论活动度,直观动态地模拟全髋关节假体间的碰撞现象。整个软件的建立基于ADAMS/VIEW的二次开发功能,将整个建模、求解、可视化技术融为一体。图1为仿真软件功能实现的具体流程图,包括全髋关节假体几何模型建立;通过运动仿真模拟三个方向的运动;建立传感器用来检测假体间的碰撞,模拟撞击;建立测量获得理论活动度数值。整个软件的参数化、上述功能的集成及人机界面的建立主要通过软件自身的命令语言和宏命令实现。

图1 髋关节假体脱位分析软件流程图Fig.1 The process of development of the software
1.1 髋关节假体几何模型
本模型建立的左髋关节假体中股骨头假体模拟成球体,股骨颈部和颈干部分分别模拟成圆柱和圆锥体,髋臼是一个与股骨头球体同心的中空半球。仿真软件中地面参考坐标系的定义如下:坐标原点O定义在股骨头球体的球心;X轴为解剖学意义上的水平轴(Transverse Axis),指向外侧;Y轴为人体纵轴(Longitudinal Axis),指向上方;Z轴为矢状轴(Sagittal Axis),指向前方。模型中,股骨颈部圆柱轴线过原点O,并假设在人体站立中立姿态下下肢机械轴(股骨Y轴)与人体纵轴Y轴平行。
软件考虑了数学上影响假体理论活动度的8个参数,包括五个假体设计参数:髋臼外直径(D')、股骨头直径(D)、综合头颈比(general head-neck ratio,GR)、股骨干的外展角(stem abduction,SA),颈干角(stem-neck angle,CCD angle);3个假体植入位置参数:髋臼前倾角(acetabular anteversion)、髋臼覆倾角(acetabular inclination)及股骨前倾角(femoral antetorsion,FA)。8个参数的取值范围见表1。
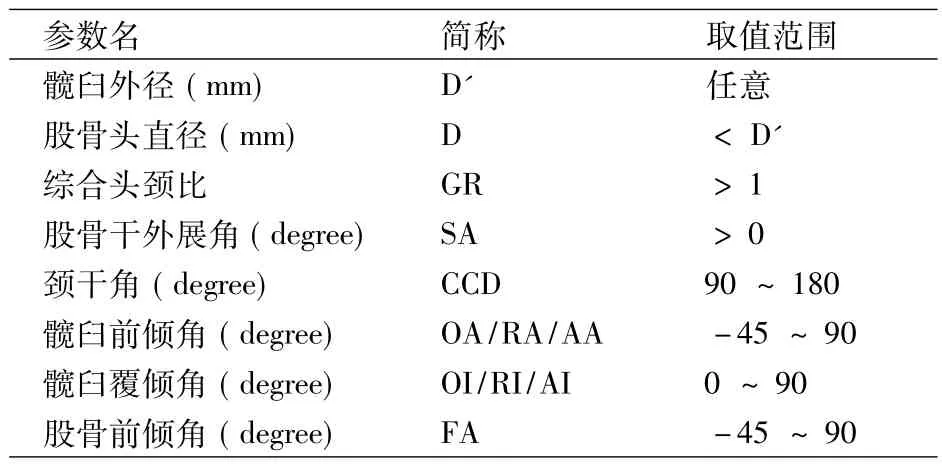
表1 软件中参数取值范围表Tab.1 The numerical scales of eight parameters in the simulation module of THA
D'和D分别用来定义髋臼假体的外径和内径。股骨头和股骨颈的尺寸由D和GR来决定。此处的GR和假体的摆动角θ有着相同的意义,它不仅与股骨头和颈部的大小有关,而且也决定与髋臼杯与颈部的设计。当颈部为圆柱而髋臼窝表面是平的、没有倒角且为非阶梯平面时,GR与实际头颈比相等(如图2)。SA为考虑到股骨解剖轴的存在股骨干假体轴线与股骨Y轴的夹角。CCD角指股骨假体颈部和干部的夹角。FA指假体股骨颈的轴线与冠状面的夹角投影在横截面上的角度。关于髋臼的位置,可以选择解剖学、X光片及术中操作三种不同定义方式适用于各种不同的具体情境。
2002 年 Yoshimine 和 Ginbayashi[8]在其活动度的公式中包含了5个参数。区别在于本软件用了两个参数SA和CCD角,而Yoshimine等用了一个参数α来描述股骨颈与水平面的夹角。这一差异在数学上并不影响理论活动度的计算,三个角度之间存在着以下关系:CCD+SA-90°=α。把SA作为一个独立的参数是考虑到股骨解剖轴的个人差异。这一角度在其他一些 THA 模型[5-7,9-10]中均为一个定值,这不够合理,因为一些病人有着严重的下肢畸形,股骨解剖轴与人体纵轴的夹角和正常人有很大差异。而CCD角也是假体制造商提供的一个主要参数。另外,由于头颈比这一概念非常容易被医生接受[11],在软件中仍然使用这一概念,称其为综合头颈比GR,GR与摆动角θ的非线性关系为:1/GR=Cos(θ/2)。

图2 假体活动范围图Fig.2 The motion range of the hip prosthesis
1.2 髋关节假体运动仿真
在软件中髋臼假体静止,股骨假体进行外展与内收,屈曲与后伸,外旋与内旋运动。假体的运动依据国际生物力学学会的建议来定义[4]。屈曲和后伸围绕横轴(X轴);外旋和内旋围绕股骨Y轴,这一轴是随着股骨的运动而变化的;外展和内收则是围绕着与前面两轴均正交的轴线的运动。
软件中除了可以完成从人体正常中立位开始的六个方向的运动外,还可以完成复合运动。任一种复合运动都可以通过定义股骨假体的初始位置来实现。股骨假体的初始位置可以通过相对于初始站立位的一系列旋转得到。而进行一系列旋转,则需要旋转顺序及旋转的具体角度这两个参数,在软件中这两个参数也考虑到其中。如图5,软件中提供了6种旋转顺序供选择,分别是“1、2、3”的排列组合。“1”对应于后伸(+)和屈曲(-),“2”对应于外旋(+)和内旋(-),“3”对应于外展(+)和内收(-)。例如,“132”指股骨假体先后伸或屈曲,再外展或内收,最后再外旋或内旋。同时具体的旋转角度也需要用户根据具体情况输入。如果用户想仿真90°屈曲时的内旋,可以选择旋转顺序123,同时在“屈曲/后伸”格里输入“-90”(“-”表示屈曲),如此来定义初始位置,然后再进行内旋运动的仿真。
2 髋关节假体脱位分析软件的主要技术与应用
2.1 模型运动副的确定
在整个仿真过程中,髋臼保持静止不动,对其施加与地面的固定副,同时股骨头部、颈部和干部在运动过程中被视为一个整体,分别赋予相互间固定副:头部与颈部、颈部与干部。而股骨假体柄在各个方向的运动通过分别施加不同的转动副来实现。模拟以上六种运动时,股骨柄假体的转动副需分别施加,相互独立。表2为整个系统的自由度统计表,4个部件共24个自由度,3个固定副共减少18个自由度,一个转动副减少5个自由度,系统总自由度为1个。
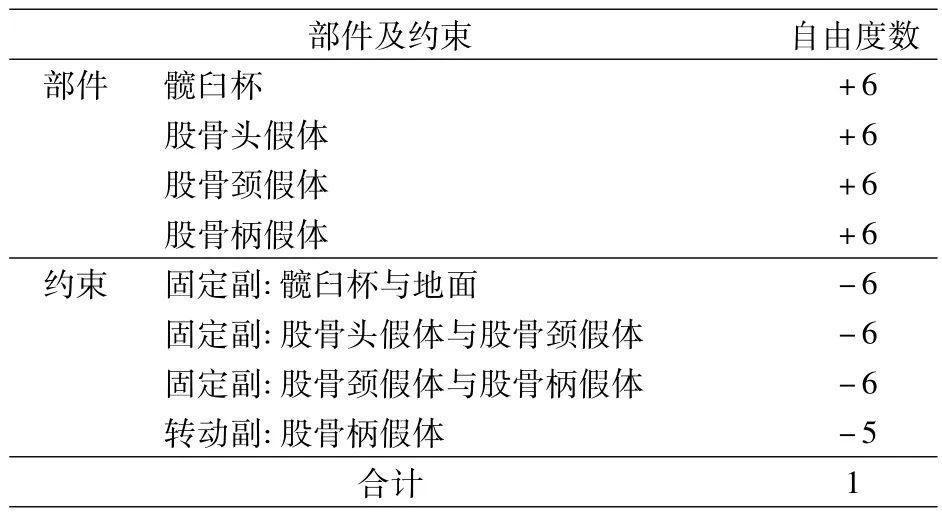
表2 系统自由度统计表Tab.2 The degree of freedom of the system
2.2 模型运动的赋予
假体柄各方向的运动通过赋予运动函数来实现,对定义好的假体柄转动副添加相应的转动运动(Rot joint motion)可以实现模型的运动。本软件转动副的运动函数选取匀速圆周运动,让股骨假体绕定义的不同轴线旋转并做匀速圆周运动,分别完成外展/内收,屈曲/后伸,外旋/内旋运动。
2.3 传感器的建立
建立传感器的目的是让系统在假体模拟运动时能检测到碰撞,并停止运动,从而模拟出髋关节从初始位运动到各个方向上的极限位置这一过程。本文利用髋关节假体碰撞时模型的几何性质来定义传感器,如图2,假体碰撞时,股骨颈的轴线与髋臼的轴线角度β一定,为θ/2,因此将随着股骨柄运动不断变化的夹角β为传感器,同时设置当β≥θ/2时,碰撞发生,运动停止。
2.4 测量功能的建立
通过建立测量考查股骨假体从初始位置分别绕三个轴旋转至碰撞所转过的角度,即为全髋关节假体理论活动度。在软件中对之前建立假体模型进行运动测量,利用其中的测量参数“Ax_Ay_Az_Projection_Angles”记录旋转角度,它记录了假体从初始位开始绕轴旋转的转动角,当传感器发现假体发生碰撞时,测量停止,此时得到的转动角即为相应运动的理论活动度,绕三个轴的运动分别通过建立相应运动的测量来得到各自的转动角,即三个方向活动度。
2.5 运动仿真和输出结果
对模型建立运动仿真驱动模型运动,并设置仿真运动参数,如类型、步数、终止时间等,通过设置仿真运动参数调整仿真精度。
整个软件可以实现髋关节假体运动仿真,假体旋转角度的数值随着股骨头假体的旋转运动而不断变化,直到假体碰撞时停止变化,得到最后的理论活动度,并显示在建好的测量中。
2.6 可视化人机界面的建立
为了临床医生在全髋置换手术前能更直观和方便地使用此活动度仿真软件,友好的可视化人机界面基于ADAMS/View进行了二次开发,建立的人性化下拉菜单、以及实现功能的对话框,通过软件自身的命令语言和宏(macro)命令完成。在建立的人工髋关节脱位分析软件的操作界面上,通过左边对话框中可以进行髋臼位置的定义方式选择、各参数设置、初始位置的设定、精度的设置,设置好后可以进行建模和运动仿真,运动会在右边的窗口中实时显示。
2.7 实例
建立的人工髋关节脱位分析软件的操作界面如图3所示,软件在仿真过程中可以非常直观的看到髋关节假体从初始位到碰撞的整个运动过程,图4为股骨头假体在完成四种运动时的初始位及与髋臼撞击时的情景。

图3 软件操作界面图Fig.3 The operation interface of the THA simulation module

图4 四种运动的初始及极限位置示意图Fig.4 Diagram of four motions from different initial positions until prosthetic impingement
3 总结
建立一个参数化的三维髋关节假体脱位分析软件对于临床应用具有一定意义。利用这一软件能够为临床医生手术前后提供帮助,解决了临床中原本需要花费较长时间才能解决的全髋假体置换位置的确定和术后风险评估等问题,减少或避免术后脱位的发生。
[1]McCollum D E,Gray W J.Dislocation after total hip arthroplasty.Causes and prevention[J].Clin Orthop Relat Res,1990,(261):159-170.
[2]Woo R Y,Morrey B F.Dislocations after total hip arthroplasty[J].J Bone Joint Surg Am,1982,64(9):1295-1306.
[3]Morrey B F.Instability after total hip arthroplasty[J].Orthop Clin North Am,1992,23(2):237-248
[4]Wu G.,Siegler S,Allard P,et al.ISB recommendation on definitions of joint coordinate system of various joints for the reporting of human joint motion——part I:ankle,hip,and spine[J].International Society of Biomechanics,J Biomech,2002,35(4):543-548.
[5]D'Lima D D,Urquhart A G,Buehler K O,et al.The effect of the orientation of the acetabular and femoral components on the range of motion of the hip at different head-neck ratios[J].J Bone Joint Surg Am,2000,82(3):315-321.
[6]Widmer K H,Majewski M.The impact of the CCD -angle on range of motion and cup positioning in total hip arthroplasty[J].Clin Biomech(Bristol,Avon),2005,20(7):723-728.
[7]Widmer K H,Zurfluh B.Compliant positioning of total hip components for optimal range of motion[J].J Orthop Res,2004,22(4):815-821.
[8]Yoshimine F,Ginbayashi K,A mathematical formula to calculate the theoretical range of motion for total hip replacement[J].J Biomech,2002,35(7):989 -993.
[9]Seki M,Yuasa N,Ohkuni K.Analysis of optimal range of socket orientations in total hip arthroplasty with use of computer- aided design simulation[J].J Orthop Res,1998,16(4):513-517.
[10]Padgett D E,Lipman J,Robie B,et al.Influence of total hip design on dislocation:a computer model and clinical analysis[J].Clin Orthop Relat Res,2006,447:48 -52.
[11]Widmer K.H.Comment on A mathematical formula to calculate the theoretical range of motion for total hip arthroplasty[J].J Biomech,2003,36(4):615,author reply 617-618.
The Development and Application of the Hip Prosthesis Dislocation Analysis Software
Zhou Hai,Ji Wenting,Wang Chengtao,Zeng Xiangsen,Ding Biao
1.Institute of Biomedical Manufacturing and Life Quality Engineering,School of Mechanical and Power Energy Engineering,Shanghai Jiaotong University(Shanghai,200240)
2.Shanghai inspection and testing institute for medical divices(Shanghai,200070)
Current study developed a new software for analysis hip prosthesis dislocation.The software based on the secondary development function of ADAMS/VIEW,a three-dimensional parameterized module was developed to simulate six motions of implants for total hip arthroplasty.It is a useful tool to preoperatively determine proper implants and their optimal intraoperative alignment for patient,investigate the"safe-zones"of total hip arthroplasty and also can be employed for the design of new implant system.
hip prosthesis,dislocation,THA
R318.1
A
1674-1242(2011)03-0139-04
10.3969/j.issn.1674 -1242.2011.03.004
国家自然科学基金(30810103908),上海市科学技术委员会基金(09441900300)。
周海,Email:zsea@sjtu.edu.cn
2011-06-02)
猜你喜欢
中华骨与关节外科杂志(2022年1期)2022-08-31 09:18:48
现代临床医学(2021年5期)2021-11-02 05:20:40
青春期健康(2020年16期)2020-09-16 10:34:28
武警医学(2018年10期)2018-11-06 07:04:32
阅读(科学探秘)(2016年3期)2016-05-30 10:48:04
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:09
中华骨与关节外科杂志(2016年5期)2016-05-17 06:11:01
中华骨与关节外科杂志(2016年5期)2016-05-17 06:10:53
中国继续医学教育(2015年11期)2015-04-12 12:42:27
河南医学研究(2014年2期)2014-02-27 14:51:29