
行星探测器GNC系统自主安全模式设计
2010-12-11 01:31:54黄江川王晓磊
空间控制技术与应用 2010年4期
杨 巍,黄江川,王晓磊
(1.北京控制工程研究所,北京 100190; 2.空间智能控制技术国家级重点实验室,北京 100190)
行星探测器GNC系统自主安全模式设计
杨 巍1,2,黄江川1,王晓磊1
(1.北京控制工程研究所,北京 100190; 2.空间智能控制技术国家级重点实验室,北京 100190)
针对行星探测器GNC系统自主生存能力要求高的特点,设计具有黄极捕获功能的惯性安全模式和无惯性系定向支持的应急安全模式.描述安全模式下姿态确定与控制任务,提出相应的方案.通过对安全模式的任务分析可知,该模式下探测器可以自主进行姿态机动,保证能源供给和星地通信链路建立.
安全模式; 自主生存; 黄极捕获; 非主轴姿态机动
安全模式作为探测器或卫星的最后保障十分重要,国内外大部分飞行器都设计了安全模式.文献[1]中对安全模式进行了描述,将安全模式作为独立的备份控制模式,自主将卫星定向在能源和热控安全的姿态上.文献[2]中将卫星的初始捕获与安全模式作为一个模式,其下分为3个子模式:速率阻尼、地球捕获、偏航捕获以及稳定状态.文献[3]中的安全模式包括:太阳定向和长期保持两个子模式.由于行星探测器距离地球远、空间衰减大、通信延迟时间长,同时还面临着十分复杂的空间环境,因此其安全模式不但要保证探测器的能源安全,还要在星地通信中断时重新建立星地通信链路,等待地面干预处理.结合参考文献中的安全模式设计方法,针对行星探测器的特点提出带有黄极捕获和地球捕获功能的惯性安全模式以及无惯性系定向支持的应急安全模式,用以保证行星探测器能源供给和通信的基本需要.
1 安全模式任务要求
行星探测任务由于距离地球远、信道衰减大,测控天线无法设计为全天球覆盖,其指向受到限制,因此安全模式下不仅要保证能源供给,还要自主完成星地通信链路的建立.考虑到以上两个约束条件以及整星故障的不确定性,行星探测器安全模式应满足以下几个条件:
1)帆板对日定向,保证整星能源安全;
2)天线对地,保证测控链路安全;
3)整个过程不依赖星历计算;
4)安全模式可长期坚持,从安全模式建立到退出,整个过程的燃料消耗要尽可能少.
从以上的任务要求可以看出,行星探测器GNC系统的安全模式任务复杂,需要进行一系列的姿态机动任务才能最终建立安全模式.此外,由于行星探测器携带的燃料有限,对燃料消耗也有严格要求.当出现星地通信中断时,为了恢复星地通信,需要设计惯性安全模式和应急安全模式以建立星地通信链路.
2 安全模式设计
建立探测器本体坐标系oxbybzb,其中本体轴xbybzb为星体惯量主轴.由于太阳系内的行星与地球绕日运行的轨道面基本在一个平面内,即黄道面.黄极为黄道面的法线,在惯性坐标系中是固定的,如图1所示建立地心赤道惯性系和地心黄道惯性系,其中OXYZ为地心赤道惯性坐标系,OXeYeZe为地心黄道惯性坐标系.北黄极在天龙座(赤经180°,赤纬66.5°),南黄极则在玉夫座(赤经0°,赤纬-66.5°).
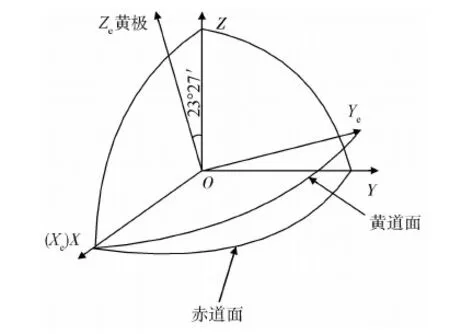
图1 黄极指向示意图
2.1惯性安全模式任务描述
(1)太阳捕获
为了保证探测器的能源供应,在安全模式下要进行太阳捕获任务,使太阳帆板指向太阳.帆板驱动机构旋转轴与±yb平行,机械零位指向星体±xb轴.天线驱动机构分A、B两轴,A轴以xb为轴线转动,当A轴处于零位时,B轴以星体yb为轴线转动,即天线零位指向在本体oxbzb平面内.具体过程是首先控制天线和帆板归零并锁定;进行速率阻尼;然后利用太阳敏感器测量太阳敏感器方位,根据陀螺和太阳敏感器数据进行姿态确定;控制探测器本体+xb轴指向太阳.
(2)黄极捕获
从行星探测器的安全模式任务要求中可知,该模式要自主完成通信链路建立.为了保证实现天线指向地球设计了黄极捕获功能,黄极指向如图1所示.
根据星敏感器的导航星表可以测量确定黄极在赤道惯性坐标系的方位.当完成太阳捕获后,控制探测器绕本体xb轴转动,使yb轴与黄极指向平行完成黄极捕获.
(3)地球捕获
黄极捕获完成后,控制探测器绕本体yb轴慢旋搜索上行信号峰值,同时帆板解除锁定并反向跟踪太阳.当搜索到地面测控站峰值信号后停旋,此时天线指向地球,实现地球捕获建立星地通信链路.
惯性安全模式的进入条件是当星地通信中断超过一定时间时,视为探测器严重故障状态,自主转入惯性安全模式;模式的退出条件是当地球捕获成功时,由地面遥控退出;当连续多次地球捕获不成功时,则自主转入应急安全模式.
2.2应急安全模式任务描述
应急安全模式是在无惯性系定向支持,仅依靠陀螺和太阳敏感器进行姿态测量定姿的工作模式.具体任务如下:
1)应急安全模式下,自主切换至中增益天线.中增益天线具有±16°的天线波束宽度,有利于捕获地球;
2)重新进行天线、帆板归零并锁定,太阳捕获;
3)太阳捕获后,根据中增益天线安装位置,控制探测器俯仰轴转动一定角度,使中增益天线电轴方向与太阳矢量方向夹角为20°;
4)控制本体绕太阳矢量方向旋转,若地球、探测器和太阳角小于20°则转动一圈可以捕获地球;若24h内未实现捕获,则继续绕探测器的俯仰轴旋转,使中增益天线电轴方向与太阳矢量方向夹角增至40°,重复上述转动.两种地球捕获方式如图2所示,α为地球、探测器、太阳矢量夹角,β为中增益天线波束宽度,γ为中增益天线电轴太阳矢量偏置角(假设电轴方向与探测器本体轴方向一致).

图2 应急安全模式地球捕获示意图
以火星探测器为例,根据火星和地球绕日运行的轨道关系可知,火星探测器的α角不超过50°,此时两种搜索必有一种能捕获地球.由于该模式下探测器转轴不是星体主轴,且需每天调整一次转轴,燃料消耗较大,因此该模式只能作为最后的安全措施.
应急安全模式的进入条件是惯性安全模式多次未能捕获地球,自主转入应急安全模式;退出条件是当完成地球捕获后,等待地面干预,由地面遥控退出应急安全模式.
2.3姿态测量方案
(1)太阳捕获
为了实现太阳捕获采用0-1太阳敏感器、数字太阳敏感器搜索太阳;由数字太阳敏感器和陀螺精确定姿.
(2)陀螺-星敏感器滤波定姿
在黄极捕获阶段,由于黄极的指向相对惯性空间是不变的.因此可以利用星敏感器测量黄极方位,从而得到探测器本体Y轴相对黄极方位的姿态偏差,进行惯性空间姿态机动使Y轴指向黄极方向,完成黄极捕获.
在太阳捕获后、黄极惯性姿态机动前、后,都需要利用陀螺和星敏感器进行精确定姿.采用陀螺数据进行姿态角预估,同时利用星敏感器修正陀螺漂移[4].
(3)陀螺预估计
在故障情况下需要快速的建立惯性定向姿态,因此在黄极捕获过程中绕X轴旋转机动采用推力器进行姿态机动使yb轴指向黄极.由于姿态机动的角度较大、角速率较高,星敏感器无法连续地进行观测,因此只能采用高精度的速率积分陀螺测量估计探测器的惯性姿态.利用陀螺对姿态角和姿态角速度在短时间内进行预估计,为姿态机动控制提供姿态测量数据.
2.4姿态控制方案
(1)惯性安全模式姿控方案
从节省燃料的角度,在对机动角度和角速度要求不高的情况下,应采用动量轮控制;当需要大角度姿态机动时需采用相平面喷气姿态控制.该模式下的太阳捕获过程中,可以采用动量轮和喷气联合控制;黄极捕获过程,由于姿态机动角度和机动角速度比较大,因此采用喷气控制,同时动量轮保持额定转速.
(2)应急安全模式姿态机动控制方案
由应急安全模式的任务分析可知,在地球捕获时探测器姿态机动转轴不是本体主轴.在机动过程由于主轴惯量不相等而出现角速度耦合的情况,给姿态机动控制带来了困难.目前星上常用的姿态机动控制算法是相平面喷气控制,但计算量相对较大.本文提出的另一种姿态机动方案,在保证足够精度要求的基础上,具有计算量小的特点.
1)动力学模型
将探测器作为刚体建立其动力学模型:
将式(2)展开可得:
假设I1>I2>I3,且当无外力矩作用时,刚体能量和角动量守恒.
式(4)为能量椭球和角动量椭球,式中h为角动量大小,ε为能量大小.非对称自由刚体的角速度矢量为角动量椭球和能量椭球的交线如图3所示.由图3可以看出无外力矩作用时,探测器无法绕固定方向即太阳矢量方向转动.因此,需要采用非惯性主轴的姿态机动算法,实现应急安全模式下的姿态机动要求,同时满足燃料消耗的要求.
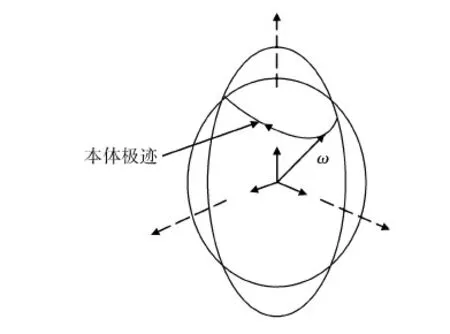
图3 非对称刚体自由转动的角速度矢量
2)燃料消耗分析
由图3可以看出要维持机动方案中的角速度则需要相应的力矩维持标称转动.由于应急安全模式的运行时间长,需要对燃料消耗进行分析.
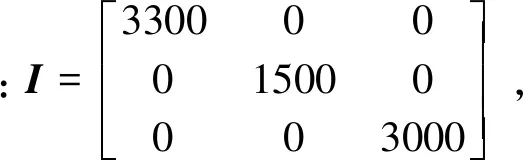
假设三轴惯量为:

脉冲喷气力矩均为Tim=8N·m,
推力器推力为F=10N,
推力器比冲为Isp=2746N·s/kg,
自旋轴与xb轴夹角为θ=20°,
则三轴角速度为[0.282 0 0.1026]T(°)/s.
由式(3)得:
在一个自旋周期内对T积分:
假设喷气控制为脉冲力矩,令Δt为等效的脉冲喷气作用时间则有:
令P为燃料消耗,则:
代入具体参数得探测器自旋一周20min的燃料消耗量:P=1.444×10-3kg,则12h消耗燃料量为0.052kg.
3)非主轴自旋姿态机动算法
星体控制力矩与喷气点火指令有以下关系:

将探测器相对于惯性空间的本体角速度表示为欧拉轴-角式:

将式(10)化为矩阵形式并代入式(2)得

为了便于分析,将式(11)改写为:
式中,|δi|为[0,1]之间的连续量,p=Ir,u=-r×Ir.
进一步得
式中,g=A-1p,h=A-1u.
图4所示为非主轴旋转姿态机动算法框图.
图中,E为姿态误差,ΔθC为每个采样周期的指令角度增量,Δθ为每个采样周期陀螺测量的角度增量,D为姿态角误差和角速度误差的合并误差,K为姿态误差增益,S为喷气指令向量,ωC为指令三轴角速度,ω为估计三轴角速度.
根据前面的动力学分析有:
4)角速度估计器设计
由图4可知陀螺的高频测量噪声可能会导致错误喷气,因此需要对陀螺测得的角度增量经角速度估计器进行处理,这样得到的估计角速度与指令角速度进行比较得到角速度误差.
考虑ω的离散z变换:
由式(17)可以看出,该式具有低通特性,因此可得:

由于
可得
将式(19)、(21)代入式(18)可得:
将式(9)化为矩阵形式后代入式(2)得:
当实际角速度与指令角速度相等时并结合式(11),则式(20)可化为:

式(18)、(22)和(25)组成了角速度估计器的计算公式.
5)算法仿真
a)仿真参数

采样周期:ΔT=0.1s,
死区阈值:θD=0.8°,
喷管推力:F=10N,
脉冲喷气力矩:Tim=8N·m,
陀螺测量噪声方差:0.05(°)/h.
b)仿真结果
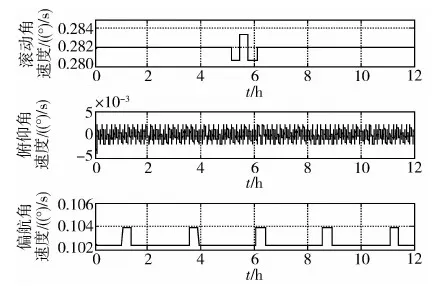
图5 三轴估计姿态角速度

图6 三轴姿态误差

图7 三轴喷气指令
c)燃料消耗分析
喷气控制采用10N推力器,假设单分支情况下,每轴两个推力器分别提供该轴正向和负向的控制力矩.设推力器额定比冲为2746N·s/kg.根据喷气次数和喷气时间间隔,可得旋转一周的燃料消耗:
式中:n为喷气次数;F为推力器推力;ΔT为每次喷气时长;Isp为推力器额定比冲.
由仿真程序可以计算出应急安全模式运行12h的总喷气次数n,再由式(26)可以得到在姿态误差精度为1°要求下的燃料消耗为0.0579kg,基本与理论计算结果一致.
d)结果分析
通过仿真曲线可知,在姿态机动过程中三轴姿态误差小于1°,姿态角速度误差小于0.01(°)/s.由于安全模式下姿态精度要求较低,因此能够满足姿态精度的要求.同时通过仿真还可计算出姿态机动的燃料消耗量,与理论计算值基本一致,因此该算法可以实现绕非本体主轴的姿态机动控制,满足在应急安全模式下进行地球捕获的姿态精度要求和燃料消耗要求.由算法分析过程中可知,该算法采用增量方法更新姿态误差,不计算姿态误差矩阵,从而使计算量减少,适合于应急安全模式下的非本体轴快速机动姿态控制.此外,当选择比较小的指令角速度时,转动一周所消耗的燃料也相应减少,因此可以根据对燃料消耗的限制灵活选择自旋角速度.
3 结 论
由于一般的近地空间飞行器测控天线可以设计为全天球覆盖,因此其GNC系统安全模式仅需满足能源供给即可,而行星探测器的安全模式不仅要保证能源供给,还要实现故障情况下自主建立星地通信链路.本文针对行星探测器自主生存能力要求高的特点,从探测器任务需求的角度出发,设计了行星探测器GNC系统的自主安全模式,包括惯性安全模式和应急安全模式.在惯性安全模式中,利用了太阳系内行星基本均运行在黄道面内的特点,提出了黄极捕获方式使探测器测控天线指向与地球处于同一平面,进而实现地球捕获;在应急安全模式下,针对该模式姿态机动转轴不是本体轴,提出了非本体轴姿态机动方案,可以满足应急模式下姿态机动任务要求,同时又具有计算量小的特点.
[1] David M,Joseph T.Guidance,navigation,and control subsystem for the EOS-AM spacecraft [C].AIAA Guidance,Navigation and Control Conference,Hilton Head Island,USA,August,1992
[2] Winkler S,Duske N,Wiedermann G,Gockel W.Earth-oriented safe mode: concept,design,and results for the GMES sentinel-2 satellite [C].AIAA Modeling and Simulation Technologies Conference,EADS Astrium,Friedrichshafen,Germany,2009
[3] Robertson B,Sabelhaus P,Mendenhall T,Fesq L.The recovery of TOMS-EP [R].AAS 00-76
[4] 李琳琳.卫星自主轨道确定及姿态确定技术研究[D].中国科学院空间科学与应用中心,2003
[5] 章仁为.卫星轨道姿态动力学与控制[M].北京: 北京航空航天大学出版社,2006
[6] 耿长福.航天器动力学[M].北京: 中国科学技术出版社,2001
[7] 屠善澄.卫星姿态动力学与控制(2)[M].北京: 宇航出版社,2002
GNCSystemAutonomousSafeModeDesignforInterplanetarySpacecraft
YANG Wei1,2,HUANG Jiangchuan1,WANG Xiaolei1
(1.BeijingInstituteofControlEngineering,Beijing100190,China;2.NationalKeyLaboratoryofScienceandTechnologyonSpaceIntelligentControl,Beijing100190,China)
Two safe modes including inertial reference frame safe mode with ecliptic pole pointing and emergency safe mode without inertial reference frame orientation are designed for the requirement of autonomous survival capability of interplanetary spacecraft.Tasks of attitude determination and control in the safe mode are described in this paper,and then the corresponding schemes are proposed.It is shown from the task analysis for safe modes that the spacecraft autonomous attitude maneuver will guarantee power supply to be provided and communication link established.
safe mode; autonomous survival; ecliptic pole pointing; non-principal axis attitude maneuver
V448.2
A
1674-1579(2010)04-0006-06
2010-04-20
杨巍(1983—),男,黑龙江人,硕士研究生,研究方向为航天器导航、制导与控制 (e-mail: wangyi1983128@163.com).
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
装备制造技术(2020年3期)2020-12-25 05:21:52
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
