
三圆幅值法找动平衡原理
2010-08-25 08:20余秋兰
设备管理与维修 2010年1期
余秋兰 张 键
作者通联:武汉工程职业技术学院汽车工程系 武汉市 430080
E-mail:fishever@163.com
三圆幅值法是现场找动平衡的方法之一,与影响系数法相比,三圆法的优势在于不需要精确地测量不平衡矢量的相位角,对测量仪表的配置要求低。不测相位角,只测最大振动幅值,适合很多缺乏精密仪器需要找动平衡的场合。但三圆幅值法只适用于刚性转子的单面动平衡,即单盘、中低速转子。这类转子工业现场应用最多,几乎占所有工业转子的90%,所以三圆幅值法仍有广泛的应用范围。
在一些论及现场动平衡技术的书籍中,只有三圆幅值法现场操作步骤的讲述,缺乏对这个方法的理论证明。从而导致一些专门讲述现场动平衡技术的书(如国防工业出版社出版的《转子现场动平衡技术》2007年版)避而不讲三圆幅值法,只讲影响系数法。本文的目的是简述三圆幅值法的运用原理。
一、三圆幅值法现场动平衡操作步骤
(1)将待平衡的刚性转子配重槽圆周三等分,等分点用A、B和C表示,圆心用O表示,夹角都为120°(图1)。
(2)加试重,取试重p单位克(g)。
(3)将试重分别放在 A、B、C三点上,三次开机运转测得振幅分别为:A点振幅Ra;B点振幅Rb;C点振幅Rc单位均为微米(μm)。
(4)用相同的比例,作振动向量图:以初始机器运转时的振幅Ro为半径画圆。在Ro圆上等分三点,夹角为120°,编号也用A、B、C表示,参照图1;以A为圆心,以Ra为半径画圆;以B为圆心,以Rb为半径画圆;以C为圆心,以Rc为半径画圆;在图2中,圆Ra和圆Rb交于a点,圆Ra和圆Rc交于b点,圆Ra与圆Rc交于c点;连接abc三点,并作△abc的外接圆,圆心为O1,如图3所示;连接圆心O、O1;测量OB和O、O1的夹角,用α来表示。
(5)平衡质量的计算和平衡位置的确定。平衡质量m=pR0/OO1,单位(g)。平衡位置在刚性转子上,从B点向A点移动角度α。

图1
二、三圆幅值法的运用原理
三圆幅值法是现场寻找转子动平衡的一种经验法,书本上很少有介绍,在此简单证明其可行性。
若转子在未加任何试重的情况下,测得的原始不平衡矢量的振矢大小为Ro,该矢量方向未知。由于该矢量的方向未知,分别讨论若该矢量位于以下三种情况下的三圆幅值法的运用原理。①若原始不平衡矢量R0的方向与图1中OA、OB、OC某一方向重合。②若原始不平衡矢量R0的方向与图1中线段AB、AC、BC的三条垂直平分线中某一条平分线重合。③一般情况。原始不平衡矢量除以上两种情况以外的方向。由于一般情况更具普遍性,因此主要证明一般情况。
1.一般情况
(1)在A点添加试重。理想状态下,若转子处于理想平衡状态时,在A点添加质量为为W(g)的试重,若此试重产生的振矢为Rw,则此方向必沿OA方向。但Rw大小无法测量。

图2

图3
实际状态下,若原始不平衡矢量的R0方向如图4中OC所示,A点添加质量为W(g)试重后,可测得转子此时的合成不平衡量振矢,大小为Ra,矢量方向无法测量。但矢量Rw、Ro、Ra必满足图4中平行四边形OABC,其中矢量图中OB,OC的长度已知,OA的方向已知。
(2)在B点添加试重。去掉A点所加试重W,在图1中圆盘B点添加同样的试重,则三个振矢Ro,Rw,Rb同样有如图5所示平行四边形其中 OD、OC的长度已知,DE的方向已知,如图5所示与OA的夹角为120°。

图4
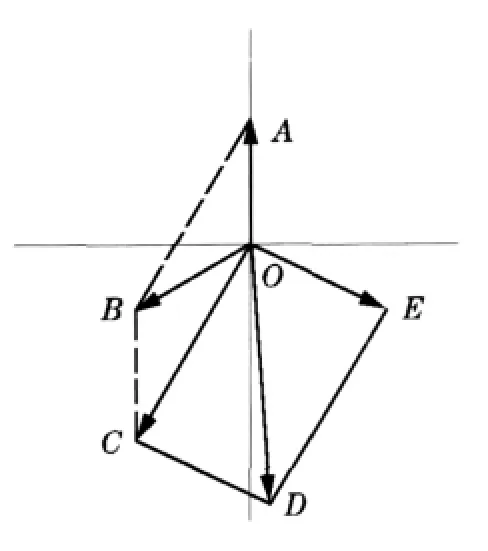
图5
由于试重W所产生的矢量长度为OA(该长度未知),原始不平衡质量m(方向未知)所产生的矢量长度为OC(已知),故要求解试重W产生的振矢大小也就转化成了求OA的长度。
(3)利用几何作图法确定线段OA的长度
将所有矢量转化到矢量三角形中,如图6所示,图中∠AOE=120
将矢量三角形ODE逆时针旋转120°,则有图7,图中OA=Rw,BE=ED=Ro,OD=Rb,OB=Ra。则图 7 中为原始不平衡量长度等于原始不平衡量振矢大小,图7中矢量三角形BAO与三角形DAO有了公共矢量此变换是为了便于几何求解。
作图。以O为圆心以Ro为半径画圆,将圆3等分,∠AOB=∠BOC=∠COA=120°,由图7可知分别在转子A点、B点添加试重后两个试重产生的不平衡矢量角度为120°。故可令图8中的等同于图7中的矢量图8中的等同于图7中的矢量
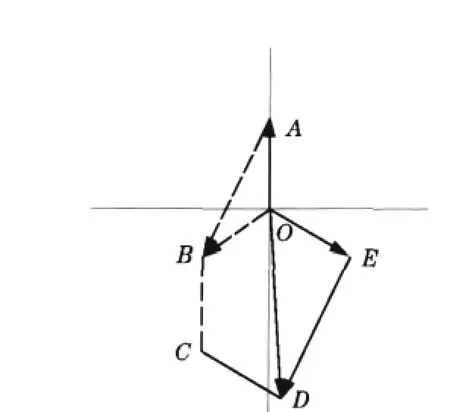
图6

图7
以A点为圆心,以Ra为半径画圆,则圆A的圆周上必存在一点M,使得三角形OAM全等于图7中的三角形EBO。其中合成振矢 Ra,而且使
再以B点为圆心,以Rb为半径画圆,则圆B的圆周上同样必有一点N,使得三角形OBN全等于图7中的三角形EDO。由图7可知是两个三角形的公共边,具有唯一性,故在图8、9中一样具有唯一性,即矢量,即M、N是同一个点,也就是说该点即在圆A上也在圆B上,即该点为圆A与圆B的交点。由于两圆的交点一般为两个,但是试重的矢量长度肯定只有一个数值,要确定哪一个,就需要补画圆C(以C为圆心,以Rc为半径画圆)。同理可得该点也必在圆C上。故从理论上讲,A、B、C三圆必有一个共同的交点,该交点满足所有的全等三角形限定条件。但是因为存在测量误差、作图误差,导致这三个圆不能交于一点,这样就构成了误差三角形△abc。误差三角形△abc是三圆交点所构成的所有三角形中面积最小的那个三角形。
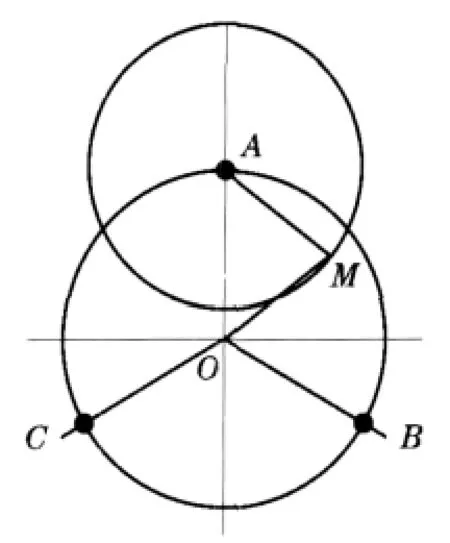
图8

图9
2.特殊情况一
原始不平衡矢量与某个试重加载位(A、B、C中任一点,假定为C点)重合。在这种情况下,试点C因为试重与原始不平衡质量同在一条线上,振矢大于Ro,因此所画圆弧越过O点,画在OC线段的反方向上;因A、B点的位置对称于OC线,且在反方向,所以试重加在这两点的合成振矢小而且相同,即A圆、B圆形成对称的状态。如图10所示。三圆相交于K点,OK线段即为试重所产生的振矢,OC为原始不平衡质量所产生的振矢Ro。平衡质量m=W×OC/OK,单位克(g),平衡位置在OK的延长线上,A点、B点中间,C点的相对位置。
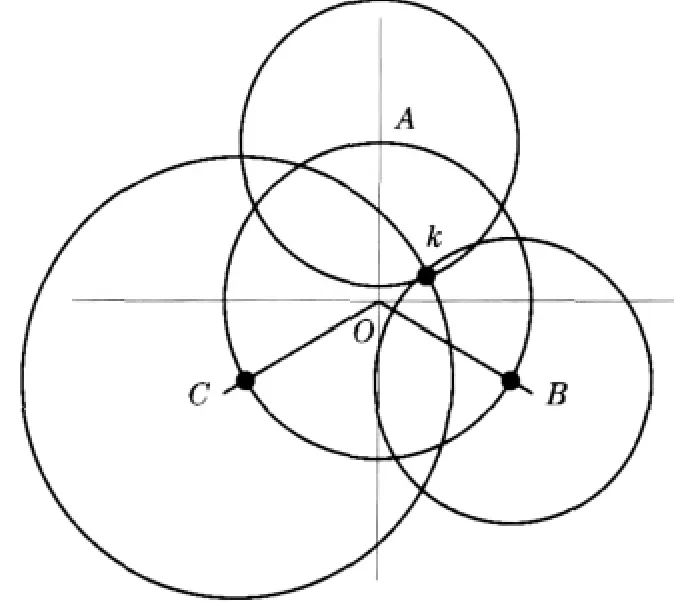
图10
3.特殊情况二
原始不平衡矢量恰好位于两个试重加载位(A、B、C中任一点)的中间,即原始不平衡矢量Ro的方向与图 1中线段 AB、AC、BC的三条垂直平分线中某一条平分线重合。假定该矢量位于B、C中间。在这种情况下,C圆与B圆大小相等且对称于OA线。因为A点恰在原始不平衡质量的相反位置,因此振矢最小,所绘图形如图11所示。三圆相交于K点,OK线段即为试重W所产生的振矢,OC为原始不平衡质量所产生的振矢Ro。平衡质量m=W×OC/OK,平衡位置在OA的延长线上。

图11
三、小结
由于三圆幅值法在现场找动平衡时,受到测量误差、作图误差的影响,特别是手工作图误差难以减小,所以现场动平衡的精度低于其他使用高精度仪器的动平衡方法。但是在大多数情况上平衡精度足够,平衡误差可以降到许可范围内。
猜你喜欢
一重技术(2021年5期)2022-01-18
中学生数理化(高中版.高考理化)(2021年9期)2021-11-05
鸭绿江·华夏诗歌(2021年10期)2021-05-12
新课程·中旬(2018年7期)2018-10-26
中等数学(2018年1期)2018-08-01
作文教学研究(2016年1期)2016-07-05
河北地质(2016年1期)2016-03-20
组合机床与自动化加工技术(2014年9期)2014-03-01
数学教学通讯·初中版(2014年1期)2014-02-14
东方汽轮机(2012年1期)2012-03-20
