基于动态目标位置的车辆弯道保持控制仿真
2010-07-23 00:30周芦芦
山东理工大学学报(自然科学版) 2010年2期
周芦芦,曹 凯
(山东理工大学交通与车辆工程学院,山东淄博255049)
21世纪将是公路交通智能化的世纪,人们采用先进的一体化交通综合智能管理系统.在该系统中,车辆靠自己的智能控制系统在道路上自由行驶.在车辆的智能控制中,车辆的横向控制是其技术关键.横向控制是指控制车辆在不同的车速、荷载、路况以及风阻等条件下自动跟踪行车路线,并保证一定的舒适性和平稳性.
横向控制有两种基本的设计思路,即基于车辆数学模型的方法和基于模拟驾驶员的方法.车辆横向控制模型的建立一般从动力学和运动学两个方面考虑.动力学模型中由于车辆的实际载荷、路况等因素变化较多,使车体转动惯量、轮胎侧偏刚度等参数不易准确测定,而运动学模型从车辆平面运动几何关系入手,描述车辆与行车路线之间的相对几何位置,可以避免荷载、路况等不确定因素的影响,因此本文使用运动学模型来建模.
在文献[1] 的基础上建立控制机制,设计控制器对车辆在弯道上的行驶进行智能控制,以克服了文献[2-4] 的缺点.
1 动态目标位置
动态目标位置定义为:被控车辆在跟踪、超越或避让运动障碍物过程中,随着时间和运动障碍物位置的变化而改变的预期到达位置与状态[4].它可由向量表示,其中为动态目标位置在t时刻的坐标,θt为动态目标位置的车头方向与x坐标轴正方向的夹角为受控车车头转角,θ为动态目标位置方向角,如图1所示.

图1 动态目标位置
以车辆弯路跟踪控制研究为目的,动态目标位置是随着道路线形的变化而变化的.车辆行驶在弯道上,行车道前方一定距离处中心位置为目标位置,目标位置随着车辆不断的前行运动,而不断地前移变换,形成了动态的目标位置.全局坐标系下,动态目标位置的方向角θ是由道路线形来确定,即动态目标位置处理想的车头角度应与此处道路中心线切线与x轴正向夹角角度相同.
1.1 运动学模型
式(1)是一个简化的四轮车辆前轮转向运动模型[1]
式中:θ是车头方向;α是前轮转向角;v是车速;l是轴距;Δt是估计取样时间,k是仿真步骤,四轮车的运动学模型如图2所示.

图2 四轮车运动学模型
1.2 坐标转换
若要对车辆与动态目标位置之间进行路径规划,必须先对车辆位置与动态目标位置进行坐标转化.将它们从全局坐标系中转化为以受控车辆后轴中心所在位置为原点,以其车头方向为x轴正向的局部坐标中,如图1所示.目标位置在每一步仿真中都产生新的局部坐标(x1,y1),由图1可知,受控车辆与目标位置在全局坐标系下的坐标分别为(X0,Y0)和(X1,Y1).
由几何关系可知其局部坐标值的转换关系式可由(2)所示为

在局部坐标系中,动态目标位置方向角与受控车辆车头方向角之差θ1表示为

1.3 动态路径规划
在很多研究领域里,提出了路径拟合的方法,诸如机器人控制,智能车辆系统等等.本文选择三次样条曲线作为动态路径拟合曲线.三次样条曲线是由分段三次多项式并接而成,在连接点上要求二阶导数连续,即具有二阶光滑度,因此可以很好地拟合车道变换的路径.三次样条曲线在附加控制点方面更灵活,可以在车道变换的起点和目标位置的终点之间附加第三个点,模拟驾驶员在车道变换过程中到达动态目标位置的多条路线选择.假设由车辆当前位置(x,y)、动态目标位置()以及两个位置的车头方向与水平方向的夹角θ和θ1动态地决定车道变换的路线.
车辆的局部坐标系下,车道变换的路线通过三次多项式[5]定义:

式中,a=(x1tanθ1-2y1)/=(3y1-
在本研究中,路径是从车辆的当前位置到动态目标位置过程中产生的,所以转向角总是在车辆局部坐标的圆点处计算.为了计算被控车辆到达动态目标位置的转向角,做如下推理:
车辆运动微分方程

由方程(4)可得到

然后得到

现在利用方程(1),可将以上方程写为

可推理得

因为参考车辆的局部坐标系,所以有x=0和θ=0,于是得到


2 控制器设计
Takagi和Sugeno提出了著名的T-S模糊系统模型[6],其前件是为模糊的,后件是前件的线性描述.T-S模型的本质是是将全局非线性系统通过模糊划分建立多个简单的线性关系,对多个模型的输出再进行模糊推理和判决,以此表示复杂的非线性关系.由于T-S模型可以较高精度地逼近连续的非线性系统,因此这种多个简单线性系统控制器通过模糊推理得到的全局控制器可以很好地控制非线性系统,为解决非线性系统控制问题提供了很好的途径.T-S模糊模型的模糊隐含条件语句表达如下:

式中(x1,x2,…,xk)是模糊前件的变量是前件中模糊集合隶属函数中的参数,称为前件参数为后件参数;y是模糊输出変量.式(12)表示一条规则,若推理系统中含有多条规则,那么它的表示如下:
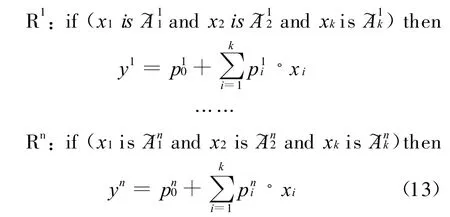


式中∏为模糊化算子,通常采用取小运算.
通过式(5)仿真得到的理想数据集,以基于TS模型的模糊神经网络来设计控制器.利用神经网络的参数学习算法对由仿真产生的数据集进行学习来调整模糊推理系统中变量的隶属度函数的形状参数,计算出隶属函数的最佳参数,使得设计出来的T-S模糊推理系统能够很好地模拟出希望的输入输出关系,在此基础上获得模糊推理系统,这一过程通过Matlab工具箱中的图形界面工具anfisedit来实现.具体步骤如下:
(1)根据本文的控制方法由程序仿真产生用于训练模糊神经网络的理想数据,其中包括训练数据、核对数据和测试数据.根据车辆运动特性,以局部坐标系下的动态目标位置(x1,y1)和动态目标方向θ1三个变量作为模糊控制的输入变量,受控车辆的转向角为模糊控制的输出变量,并根据实际情况确定各个变量的取值范围.
(2)在Matalab命令窗口输入“anfisedit”,在弹出的图形窗口界面中分别加载训练数据、测试数据和核对数据.
(3)选择网络法Grid partition单选按钮,然后点击General FIS,根据系统特点设置相应的参数,建立初始模糊推理系统.
(4)选择混合法作为训练算法,设置误差精度和训练次数,开始对模糊神经网络推理系统进行训练.
(5)在训练完成后,使用测试数据对其进行测试.如果测试误差满足要求则停止训练,若不满足要求,调整步骤(3)、(4)中的参数,最后得到需要的控制器.
3 仿真实验
为检验该动态目标位置方法的有效性,对受控车辆弯道保持的条件进行仿真试验.利用matlab中的simulink工具箱搭建仿真模块,仿真模块搭建如图3所示.利用simulink中子模块封装功能把目标位置模块和受控车辆模块分别分装在不同的子模块中[7],受控车子模块中有依据车辆运动方程搭建的模块,目标位置子模块中有根据受控车位置和道路线形来计算动态目标位置的模块组合,子模块封装处理简化了仿真界面;利用simulink中自定义模块实现坐标转化.

图3 仿真模块图
仿真过程中,假设受控车行驶在转弯半径约为200 m的左转弯道上,以0.05 s为仿真步长,动态目标位置坐标值在仿真的每一步中根据受控车所在位置结合道路线形选取道路中心线的坐标值进行更新,动态目标位置的方向则取道路中心线该点处与车辆行驶方向一致的切线方向,受控车与实时更新的动态目标位置之间的距离始终保持在15 m左右.仿真结果受控车轨迹与动态目标位置轨迹如图4所示.(图5为局部放大图)
在放大图中可以看到仿真过程中受控车与动态目标位置之间有横向偏差,整个仿真过程中的横向偏差变化如图6所示.开始时,车辆行驶在直线道路上,目标位置也定在受控车前方的直线道路上,此时受控车位置与动态目标位置的横向偏差很小,约为0.02 m,结合图7可以看到,在5 s时动态目标位置的方向角,受控车与目标位置的横向偏差开始变化,直到20 s时达到最大为0.2 m,之后在目标位置转过弯道进入直线行驶过程时慢慢减小.由图7可以看到动态目标位置的方向角首先发生变化,经过一段时间受控车的车头角度跟随目标位置的变化而变化,最后车头角度同目标位置方向角一致.这一情况说明控制输出灵活,根据设定道路线形控制输出较平稳,能够通过跟踪动态目标实现对车辆在转弯中的横向控制.

图4 车辆运动路线轨迹图
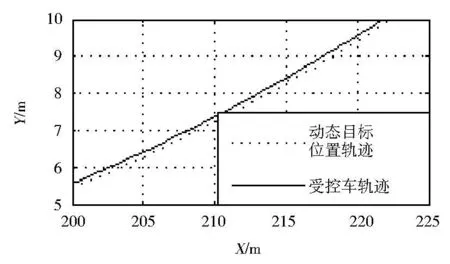
图5 转弯轨迹局部放大图
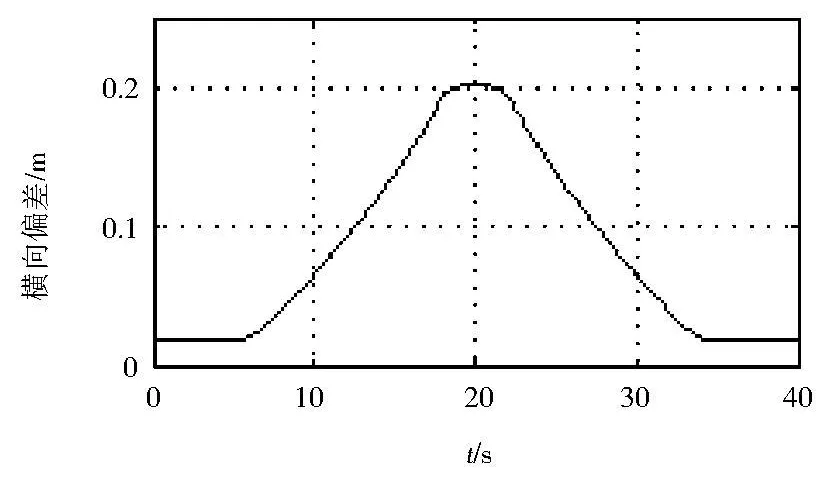
图6 横向偏差
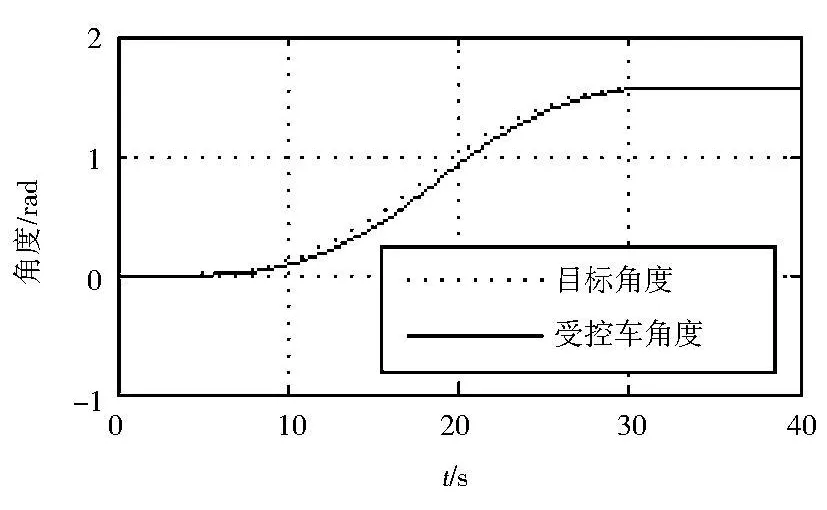
图7 受控车头角度变化
4 结束语
本文以智能车辆的横向控制为研究对象,采用自适应神经网络对T-S模糊模型的隶属度函数进行参数调整,在此基础上建立模糊推理系统,设计了控制器,实现了车辆的横向控制.该方案路径规划实时灵活变化,并且避免了采集数据误差对控制器设计的干扰.仿真结果表明:受控车辆能够跟踪动态目标位置,沿着虚拟线形平稳向前行驶,并且转向控制灵活平稳,较为理想地模拟了实际道路上车辆转向控制的特点,符合驾驶员的驾驶行为特性.
[1] 曹凯,于少伟,周芦芦.基于动态目标位置的智能车辆控制研究[J] .信息与控制,2008,37(4):476-480.
[2] 李庆中,顾伟康,叶秀清,等.移动机器人路径跟踪的智能预瞄控制方法研究[J] .机器人,2002,24(3):252-255.
[3] Kehtarnavaz N,Groswold N,Miller K,et al.A transportable neural-network approach to autonomous vehicle following[J] .IEEE T ransactions on VEHICU LA R Technology,1998,47(2):694-702.
[4] Sadayuki Tsugawa,Hiroaki M ori,Shin Kato.A lateral control algo rithm for vision-based vehicles with a moving target in the field of view.IEEE Int,Conf.Intelligent Vehicles(1998).
[5] M ohamed Anis Ben Amor,Takeshi Oda,Shigeyoshi Watanabe.A car-steering model based on an adaptive neuro-fuzzy controller[J] .IEE Trans.EIS,2004,124(11):2344-2351.
[6] 刘曙光,魏俊民,竺志超.模糊控制技术[M] .北京:中国纺织出版社,2001:212-220.
[7] 黄永安,马路,刘慧敏,等.MA TLAB7.0/Simulink6.0建模仿真开发与高级工程应用[M] .北京:清华大学出版社,2005:87-114.
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
计算机应用(2022年2期)2022-03-01
计算机应用(2021年4期)2021-04-20
计算机应用(2021年1期)2021-01-21
军事文摘(2020年24期)2020-02-06
环球慈善(2019年6期)2019-09-25
中国老区建设(2016年4期)2017-01-15
小天使·一年级语数英综合(2015年2期)2015-01-14