电动助力转向系统的滑模变结构控制
2010-07-23 00:30:34徐冠林石沛林唐绍丰唐俊杰
山东理工大学学报(自然科学版) 2010年2期
徐冠林,石沛林,唐绍丰,唐俊杰
(山东理工大学交通与车辆工程学院,山东淄博255049)
电动助力转向系统(electric power steering system,简称EPS)的控制方法多采用传统的PID控制,该方法在系统参数特定的情况下可以基本满足控制要求,但动态性能不理想.同时由于EPS系统参数变化、路面干扰等原因具有不确定性[1],使得PID控制的控制系数不能时刻处于最佳值.特定状态下的最佳值,随着系统参数变化,控制效果会变差.
滑模变结构控制方法的滑动模态对系统参数的摄动具有完全自适应性[2-4],可为具有不确定性因素的系统实现鲁棒控制提供有效的控制方法.
1 EPS的数学模型
将EPS的结构进行合理简化,并将系统中的阻尼等非线性部分忽略,对组成电动助力转向系统的转向管柱、助力电机和齿条分别进行受力分析.EPS简化模型如图1所示.
对转向柱进行动力学分析,可得

式中:Jc为方向盘、转向管柱的等效转动惯量;Td为方向盘输入转矩;bc为转向管柱阻尼系数;kc为转矩传感器扭杆刚度;θc为方向盘转角;xr为齿条位移;rp为小齿轮半径.
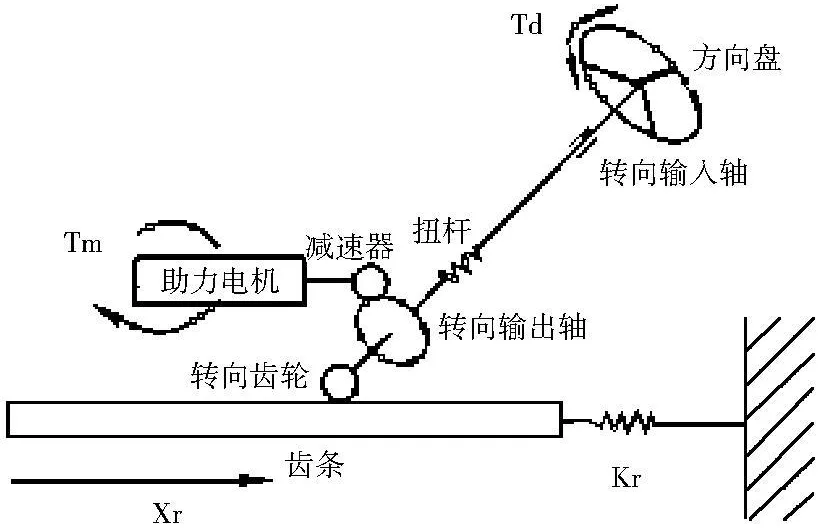
图1 电动助力转向系统简化模型

齿条部分的数学模型:
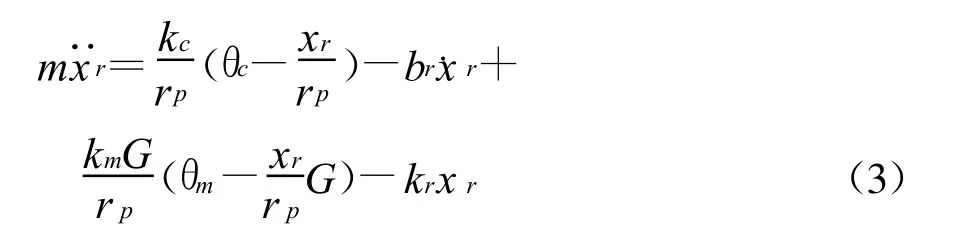
式中:m为齿条质量;rp为小齿轮半径;br为齿条阻尼系数为电机轴刚度;G为减速器减速比为电机转角为等效弹簧刚度.
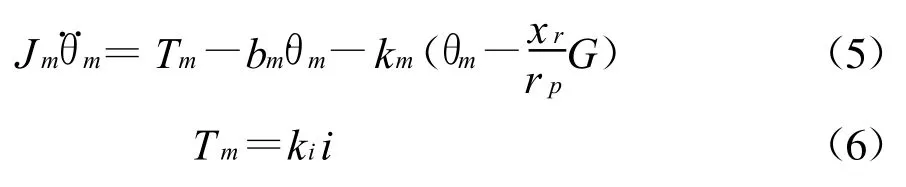
EPS系统采用直流电机,电机电压u与电感L、电枢电阻R、反电动势系数、电机电流i的关系为

对电机机械部分进行动力学分析,可得
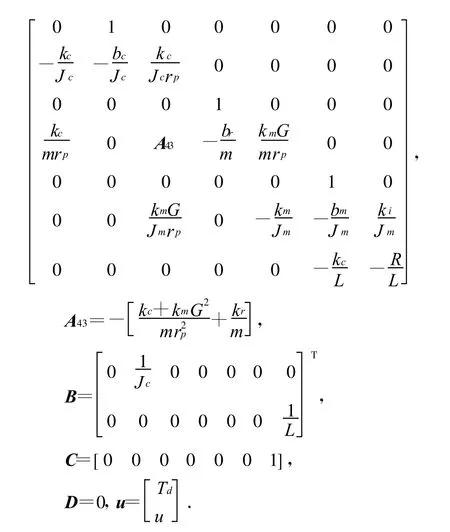
取状态变量x1=θc,x2=˙θc,x3=xr,x4=˙xr,x5=θm,x6=˙θm,x7=i,由式(1)~(6)得到系统的状态方程:

式中:

2 滑模变结构控制
滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这是与其他控制的根本区别.滑模变结构控制使系统的“结构”随时间的变化而变化,该特性可以迫使系统在一定特性下沿规定的状态轨迹做小幅度、高频率的上下运动,即“滑模”运动.这种滑动模态是可以设计的,并且与系统的参数和扰动无关,因此,处于滑模运动的系统具有良好的鲁棒性.
为实现对目标电流的跟踪,取切换函数s为电流误差e,即

其中r为目标电流.
采用指数趋近律的控制方式,其趋近律slaw[5]为

对式(8)求导,得
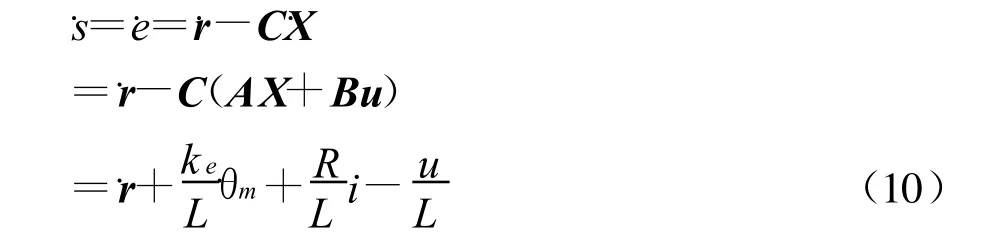
由式(10),可推导出控制器输出量

3 仿真计算与结果分析
在Matlab7.0下进行仿真计算,取目标电流为阶跃信号:r=20 A,趋近律中的k=30,ε=5,对比不同控制方法的阶跃响应.采用PID控制方法的助力电流阶跃响应如图2所示,可以看出助力电流有8%左右超调量而且调节时间约为0.18 s,采用PID控制方法可以基本满足跟踪目标电流的要求,但还不是很理想.由图2可知,采用滑模变结构控制时的助力电流阶跃响应没有超调量而且调节时间短、稳态响应好,优于传统的PID控制方法.
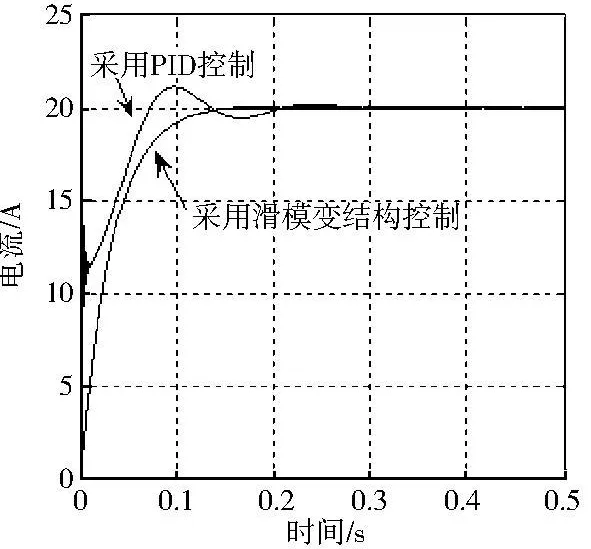
图2 采用不同控制方法时助力电流阶跃响应
实际上,仿真时采用的电机电枢的电阻值是整个电机回路的平均等效电阻值,对于旋转的电机而言,不存在一个准确的电机电枢的电阻值[6].电机的电枢电阻R增大10%和20%时的传统PID控制方法的助力电流阶跃响应与原系统的比较,如图3所示,当电枢电阻R增大10%时,超调量约为12%,当R增大20%时,超调量约为15%,并且调节时间也有所延长,可见对特定状态下的系统,采用传统的PID控制方法可以满足系统需求,但是当系统的某一参数变化时,PID控制方法就不能达到满意的控制效果.当电枢电阻增大10%和20%时,采用滑模变结构控制方法的助力电流阶跃响应与原系统的阶跃响应完全一样;当电枢电阻增大60%时,采用滑模变结构控制方法的助力电流阶跃响应才发生微小变化,只是在0.13 s时稍稍偏离逼近目标电流轨迹,然后迅速又升高至目标电流,如图3所示.由此可见,滑模变结构控制的滑动模态对系统参数的摄动具有完全的自适应性,可以为这类不确定性系统实现鲁棒控制提供有效方法.
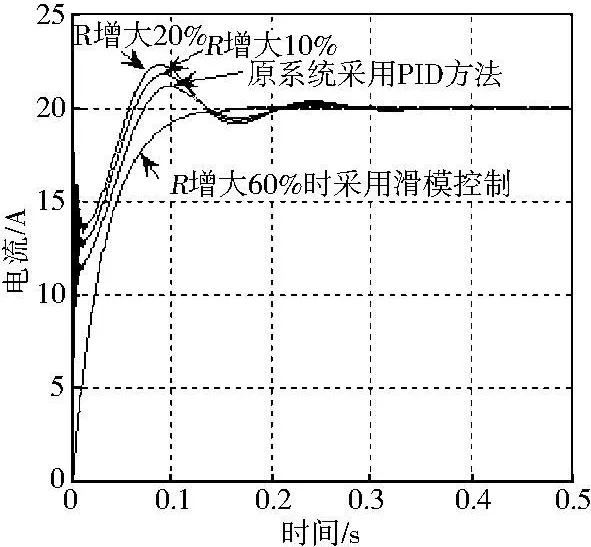
图3 参数变化时两种控制方法的阶跃响应
4 结束语
通过对EPS建立数学模型,采用指数趋近律方法设计了滑模变结构控制器,并进行了仿真.仿真结果表明与传统的PID控制方法相比,滑模变结构控制器没有超调量、调节时间较短,并且当系统参数发生变化时,助力电流阶跃响应基本不变,可以对电动助力转向系统进行鲁棒控制.
[1] 石沛林,高士香,刘昭度,等.基于BP网络的EPS系统仿真与PID整定研究[J] .微计算机信息,2009,25(13):92-94.
[2] 王丰尧.滑模变结构控制[M] .北京:机械工业出版社,1995.
[3] 王亮,任传波,赵真,等.车辆主动悬架的模型跟踪变结构控制研究[J] .山东理工大学学报(自然科学版),2009,23(2):20-23.
[4] Shyu Kuo-kai,Lin Ching-yao.Adaptive sliding mode control for variable structure systems with constraint control input[J] .Dynamics and Control,1996,6(1):49-61.
[5] 张翔,王德石.滑模控制器趋近律仿真研究[J] .微处理机,2008(1):17-18.
[6] 苗立东,何仁.电动助力转向器电动机等效电阻测量方法[J] .实验技术与管理,2006,23(03):35-37.
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25 03:50:10
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
天津教育·下(2018年9期)2018-07-13 08:25:47
华东理工大学学报(自然科学版)(2014年6期)2014-02-27 13:49:43
华东理工大学学报(自然科学版)(2014年6期)2014-02-27 13:49:43