船舶综合导航系统应用技术
2010-06-01 12:30:23韩剑辉许镇琳赵承利舒东亮
天津大学学报(自然科学与工程技术版) 2010年2期
韩剑辉,许镇琳,赵承利,舒东亮
(1. 天津大学电气与自动化工程学院,天津 300072;2. 天津航海仪器研究所,天津 300131)
船舶综合导航系统应用技术
韩剑辉1,2,许镇琳1,赵承利2,舒东亮2
(1. 天津大学电气与自动化工程学院,天津 300072;2. 天津航海仪器研究所,天津 300131)
船舶导航系统已发展为集成多种导航设备的多功能综合导航系统.为支撑系统的柔性集成,设计了开放式的综合导航系统体系结构.信息融合技术可解决信息过载问题,提高导航信息精度和可靠性.针对多传感器组合导航方式,设计了基于一种无重置联邦滤波器的导航信息融合方法.电子海图显示信息系统是综合导航系统的信息集成和监控中心,考虑航海作业与航行自动监控的需要,开发了多功能的电子海图显示信息系统应用软件,并通过相应的工程实验证明了系统的可行性.
综合导航系统;体系结构;联邦滤波;电子海图显示信息系统
综合导航系统是引导船舶航行的关键系统,在军用舰船与大型民用船舶上得到普遍应用.现代船舶导航技术涉及到导航、计算机、网络、信息融合以及海洋地理信息系统等多个学科的前沿技术,这些相关学科的技术进步有力地促进了船舶导航技术的发展.目前,船舶导航系统的种类越来越多,如惯性导航系统(INS,简称惯导系统)、全球定位系统(GPS)、多普勒(Doppler)测速系统、罗兰C无线电导航系统(Loran C)、数字导航雷达(ARPA)及电子海图显示信息系统(ECDIS,简称电子海图)等,这些导航系统各优缺点,功能也相互补充.
运用现代网络技术与信息融合技术实现各种导航系统的物理连接和信息综合集成,己经成为当前船舶导航系统的主要发展方向[1].综合导航系统通过网络将各种导航设备信息传入计算机,利用信息融合技术综合处理[2],得到本船最佳的导航信息;然后,通过电子海图实时动态地显示船舶的综合航行态势.这样,不仅提高了导航信息精度,而且扩展了单一导航系统或设备的功能,从而构成高精度、高可靠性、多功能的现代船舶综合导航系统.
1 系统体系结构
随着船舶导航技术的发展,导航设备不断增多,各学科越来越多的技术成果被引入船舶导航领域,导致系统规模日益庞大.因此,需要对船舶导航技术进行信息化和自动化的改造和提升,构建一个高度信息化、高度自动化、统一操控的船舶导航平台[3].
综合导航系统由5个部分组成.
(1)导航传感器.包括船舶自动识别系统(AIS)、GPS、INS、Loran C、多普勒计程仪回声测深仪(Echo Sounder)、气象仪和导航雷达天线.
(2)信息处理设备.包括导航信息融合处理集成装置和自动雷达标绘仪(ARPA).
(3)导航监控设备.包括电子海图显示信息系统(ECDIS)和导航用户客户端.
(4)导航数据库.包括水文、气象、航路、港口和海图等各种航行数据.
(5)系统通信网络.包括船用双冗余局域网(LAN)和导航传感器通信接口(SINT).
系统体系结构描述了综合导航系统的组成和各组成部分之间的相互连接方式[4].综合导航系统通过一体化通信网络实现导航传感器、信息处理设备、ECDIS、导航用户及导航数据库之间的实时连接.系统的体系结构如图1所示.
该体系结构可集成现有的各种船舶导航设备[5],能够配接大型船舶所要求的多个导航信息服务器[6],通过LAN与SINT可任意增减导航设备,具有很强的适应性;同时,该体系结构实现了全部导航数据与资源的共享,为导航信息的融合处理提供了数据平台.
2 导航信息融合处理
信息融合技术可以发挥各种导航设备的特点[7],提高导航系统的数据精度和可靠性.
2.1 基于∞H滤波的无重置联邦滤波模型
无重置联邦滤波采用并行计算,实时性强、滤波精度高并可进行容错设计,可对多种传感器构成的组合导航系统进行最优综合,保证船舶航行安全.Carlson[8]提出的无重置联邦滤波器采用Kalman滤波.由于Kalman滤波对系统噪声和量测噪声要求的局限性,笔者将H∞滤波应用于无重置联邦滤波结构,构成基于H∞滤波的无重置联邦滤波器,与Carlson提出的无重置联邦滤波器相比,该滤波器在保持系统容错性的同时,具有更高的精度和鲁棒性.
基于H∞滤波的无重置联邦滤波器由1个公共参考系统和3个子系统组成,每个子系统的输出与相应的公共参考系统的输出一起构成子滤波器的量测,通过子滤波器仅可获得系统公共状态的局部最优估计.为了获得系统全局最优估计,必须对局部最优估计进行再处理,融合成整体上的全局估计,这一融合算法是在主滤波器里完成的.在组合导航系统的联邦滤波器中,将捷联惯导系统(SINS)、GPS、Doppler计程仪和Loran C等导航仪器作为导航数据源,其中SINS作为公共参考系统.基于H∞滤波的无重置联邦滤波器的结构如图2所示.图2中,i(i=1,2,3)为系统公共状态的局部最优估计,Xˆc为系统公共状态的全局估计,Y~为惯导系统输出的导航参数,Yˆ为输出校正后的导航参数,FDI为故障检测与隔离模块.
基于H∞滤波的无重置联邦滤波器信息融合算法的推导过程如下所述.
设ciδX(i=1,2,3)为局部最优估计的估计误差,即为系统公共状态真值;ciP为局部最优估计的均方误差阵,Pci=i=1,2,3).假设各子滤波器的估计是不相关的,则有

即

当各子滤波器的估计误差互不相关时,有

式中R为量测噪声方差阵.
由式(2)、式(3)及马尔可夫估计理论可知,在已知量测向量Z和量测噪声方差阵R的情况下,cX的马尔可夫估计及估计的均方误差阵分别为
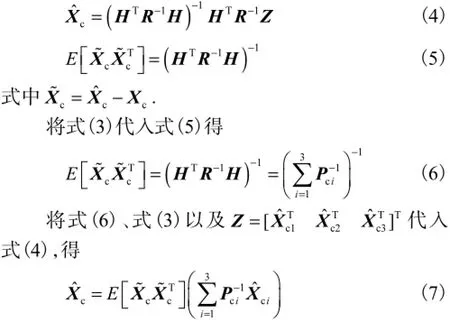
式(7)即为基于H∞滤波的无重置联邦滤波器的信息融合算法.其意义可理解为:在获取系统公共状态局部最优估计(线性最小方差估计)的条件下,将系统公共状态的局部最优估计视为系统公共状态的直接量测量,对系统公共状态进行最优加权最小二乘估计(马尔可夫估计),从而获得系统公共状态的全局估计.
2.2 仿真分析仿真时,取仿真时间为2,400,s,SINS中陀螺漂移均方值为h-10.01 °,陀螺相关漂移的驱动白噪声均方值为0.01°(h.系统经过初始对准后,姿态角误差为航向角10′、俯仰角1′、横滚角1′,位置误差为纬度20,m、经度20,m、高度20,m.
图3给出了基于H∞滤波的无重置联邦滤波器和Carlson的无重置联邦滤波器(FKF)的仿真结果.
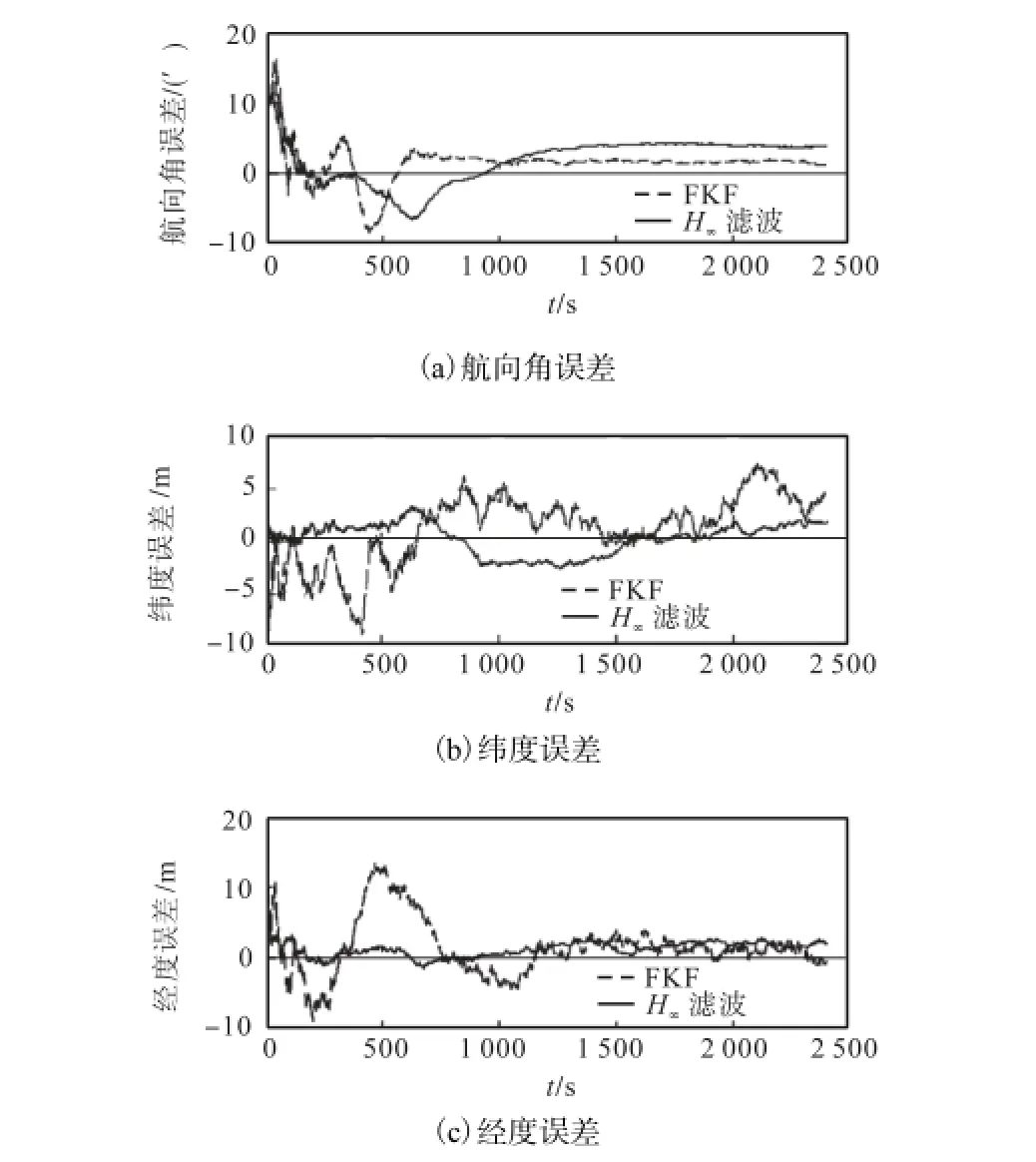
图3 主滤波器航向/位置误差比较结果Fig.3 Azimuth and position estimated error data of main filters
从仿真结果可以看出,基于H∞滤波的无重置联邦滤波器对几个导航参数误差的估计精度均高于或相当于Carlson的无重置联邦滤波器,且前者的收敛速度更快,滤波稳定性更好.
3 电子海图显示信息系统(ECDIS)
ECDIS是综合导航系统的输出终端[9],它不仅能够与位置传感器、自动舵、测深仪、计程仪等航海仪器接口,连续精确地给出船位和航行状态,还能够与ARPA雷达、AIS等导航设备组合,有效地防范各种险情,并且可以查询水文、港口及潮汐等各种信息.国际海上人命安全公约(SOLAS)要求各类客船、货船的航行系统必须配备适当的ECDIS.
3.1 ECDIS的基本功能
ECDIS的基本功能如下:
(1)可将不同格式的图源数据(S57、VCF、光栅及MapInfo格式)转化为电子导航图(SENC),实现了不同图源的海图数据的无缝拼接,并且按S-52标准显示;
(2)具备海图显示的基本功能,例如放大、缩小、漫游、分层显示和属性查询等;另外,还有安全水深、轮廓线、危险物、灯标等专门图层的加亮显示能力[10];
(3)能够显示各种导航传感器提供的船位信息以及附加的相关导航信息,能可视化地获知所有有效的SENC信息,以保障船舶航行安全;
(4)能够辅助船员进行航线制定、航路监视、航行记录和实施各项航海作业及标绘;
(5)可以与AIS、ARPA雷达进一步集成,实现船舶航行的综合态势显示,具备辅助避碰决策的能力[11];
(6)具有包括防搁浅报警、航行事件报警等综合报警能力;
(7)具有航海指南、航标表、航海通告、水文、气象、航路和港口资料的查询功能.
图4所示为叠加了雷达图像的ECDIS显示界面.
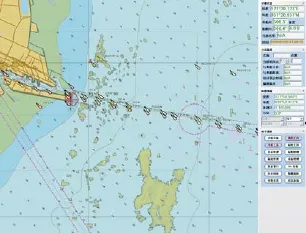
图4 电子海图显示界面Fig.4 Electronic chart display
在海图上可显示计划航线、航标、浅滩和海底障碍物;叠加的雷达图显示出海上危险目标;界面右上角的对话框显示经过融合处理的导航信息;界面右下菜单提供了海图库管理、海图作业及导航数据库查询等功能.操作人员在电子海图显示器上可观察到船舶整体航行态势.
3.2 海图系统软件结构
海图系统采用4层结构的软件体系结构,如图5所示.
图5中,第1层为应用表示层,主要由航行监控、雷达叠加、海图作业、航路管理、海图标绘和信息查询模块构成,通过调用应用支撑层功能函数访问数据支撑层来完成系统的主要业务功能.第2层为应用支撑层,为应用表示层的功能实现提供服务.第3层是系统的数据支撑层,其作用是支撑系统对图形数据和航行业务数据的访问与存储、查询等功能.第4层是通信服务层,提供海图系统与其他系统的通信接口.海图软件系统便于扩展和维护,代码具有较高的重用性,海图的业务模块与数据分离,可以方便地将海图数据布置到不同的机器上.
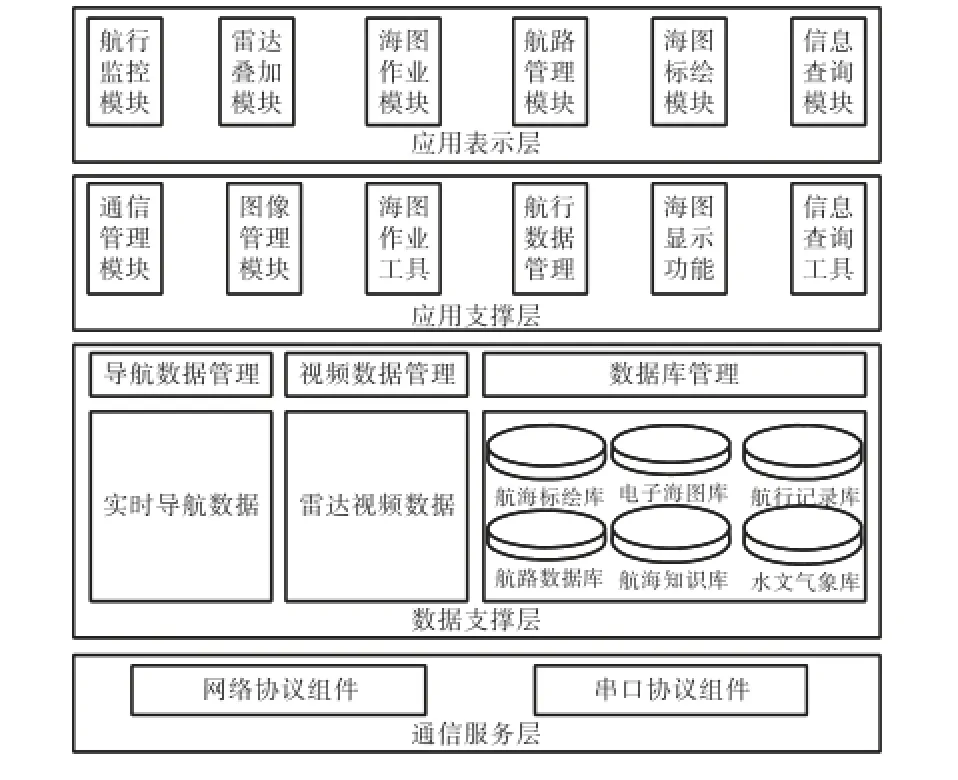
图5 电子海图软件体系结构Fig.5 Software architecture of ECDIS
4 结 语
综合导航系统不是各种导航设备的简单组合,而是多种技术的综合应用.综合导航系统集成了多个基础和应用学科的最新技术成果,随着导航传感器技术、网络技术、信息融合理论、计算机技术和海图显示技术的发展,综合导航系统将向自动化、多功能、多模式、高精度、高可靠性的方向发展.开放式系统体系结构有利于导航设备和信息的综合集成,且便于系统灵活配置.采用信息融合技术处理各导航传感器的测量数据,可以保证导航系统的数据精度和可靠性.ECDIS拓展、完善了综合导航系统的功能,保证了船舶的航行安全.
[1] 周永余,许江宁,高敬东. 舰船导航系统[M]. 北京:国防工业出版社,2006. Zhou Yongyu,Xu Jiangning,Gao Jingdong. Ship Navigation System[M]. Beijing:National Defense Industry Press,2006(in Chinese).
[2] Wang Jinling, Lee H K,Rizos C. GPS/INS integration:A performance sensitivity analysis[J]. Wuhan University Journal of Natural Sciences,2003,8(2):508-516.
[3] Kongsberg Maritime. K-Bridge Integrated Navigation[EB/OL]. http://www. kongsberg. com,2006-02.
[4] Han Feng,Wang Jianxin,Xiao Gang,et al. Description and analysis methods of information system architecture based on DODAF[C]//International Symposium on Information Science and Engineering. Shanghai, China,2008:637-642.
[5] 施闻明,章 阳,高建伟. 中小型舰艇综合导航系统研究[J]. 中国舰船研究,2006,1(4):56-57,66. Shi Wenming,Zhang Yang,Gao Jianwei. Study on the integrated navigation system of medium-sized and pintsized warships[J]. Chinese Journal of Ship Research,2006,1(4):56-57,66(in Chinese).
[6] 林伟国,王立新. 综合舰桥系统综述[J]. 船舶,2007 (4):1-5. Lin Weiguo,Wang Lixin. Survey of the warship integrated bridge system[J]. Ship & Boat,2007(4):1-5(in Chinese).
[7] Kang Guohua,Liu Jianye,Zhu Yanhua,et al. Realization of GPS/SST/SINS integrated navigation filter algorithm for ballistic missile [J]. Transactions of Nanjing University of Aeronautics & Astronautics,2005,22(2):115-118.
[8] Carlson N A. Federated filter for fault-tolerant integrated navigation systems[C]// IEEE Position Location and Navigation Symposium. Orlando,1988:110-119.
[9] Yin Yong,Jin Yicheng,Zhang Xiufeng,et al. The development and application of distributed marine simulator[C]// Proceedings of the International Conference on Virtual Reality and Its Application in Industry(VRAI 2002). Hangzhou,China,2002:284-289.
[10] Electronic Chart Display and Information System [EB/OL]. http://www. km. kongsberg. com/ks/web/nokbg 0397. nsf,2008.
[11] Sun Yao,Sun Feng. The automatic matching position technology by ECDIS and radar information [C]// Proceedings of International ECDIS Conference. Singapore,1998:208-215.
Application of Marine Integrated Navigation System
HAN Jian-hui1,2,XU Zhen-lin1,ZHAO Cheng-li2,SHU Dong-liang2
(1. School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China;2. Tianjin Navigation Instrument Research Institute,Tianjin 300131,China)
Multifunctional integrated navigation system with various navigation devices has been applied to marine navigation. In order to achieve flexible system integration,an open architecture of integrated navigation system has been proposed,in which information fusion technology was adopted to tackle the information overloading issue and enhance the accuracy and reliability of the navigation information. An information fusion method based on non reset federated filter has been designed for integrated navigation with multi-sensors. Electronic chart display and information system(ECDIS) is the centre of information integration and navigation monitoring. Therefore,multifunctional ECDIS application software has been developed to meet the need of navigation operation and automatic monitoring,and the feasibility of the system has been verified by corresponding engineering experiments.
integrated navigation system;architecture;federated filtering;electronic chart display and information system
U666.11
A
0493-2137(2010)02-0121-05
2008-11-24;
2009-05-08.
“十一五”国家科技支撑计划资助项目(2006BAG03B04).
韩剑辉(1966— ),男,博士研究生,hanjianhui1004@yahoo.com.cn.
许镇琳,zlxu@eyou.com.
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
航海(2020年4期)2020-08-17 16:13:40
电脑爱好者(2019年17期)2019-10-30 03:34:48
快乐作文(5.6年级)(2019年5期)2019-09-10 05:59:05
少林与太极(2018年9期)2018-09-28 08:37:34
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
山西教育·招考(2018年4期)2018-05-30 10:48:04
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
孙子研究(2016年4期)2016-10-20 02:38:06