
基于M SP430单片机的智能小车设计与实现
2010-01-16 10:16陈晶晶
湖北工程学院学报 2010年6期
陈晶晶
(龙岩学院物理与机电工程学院,福建龙岩364012)
基于M SP430单片机的智能小车设计与实现
陈晶晶
(龙岩学院物理与机电工程学院,福建龙岩364012)
介绍了一种以MSP430单片机作为核心控制单元的智能小车的设计方法。由安装在车头和轮胎上的传感器负责采集各种信号,并将采集到的电平信号传给单片机,单片机经过处理后控制电机,完成小车的前进,转向和路程显示功能。给出了小车系统的硬件和软件设计方法,经过实际测试,能够完成所有功能。该设计可用在自动停车系统和工厂的运料车上。
智能小车;传感器;单片机;路面检测
随着计算机技术、信息技术和人工智能技术的飞速发展,智能车的使用越来越普及,相对于传统的汽车而言,智能小车有着更好的安全性、机动性和广泛的适用性[1]。与此同时,科学技术和生产力的发展也使智能车在探险、排爆以及工厂运料等领域发挥的作用逐渐增大。因此,智能车的研制问题也成为一个热门。本文着重介绍了以m sp430单片机作为核心控制单元,通过处理外部传感器传回的数据,自动实现巡线、避障等功能。
1 方案设计
本智能车采用 TI公司的m sp430单片机作为唯一的核心控制单元,该系列单片机具有功耗低,功能强大,接口丰富等优点[2]。通过此芯片设计出的智能小车具有省电和抗外部干扰强的优点,可以长时间在恶劣环境下工作。小车系统一共由电源模块、电机驱动模块、路面探测模块和路程计算模块组成。电源模块采用灵活方便的单电源供电模式,为所有模块供电。路面探测模块使用反射式红外传感器负责采集各种路面信息,并将采集到的信号反馈给核心控制单元,核心控制单元对采集到的信号进行处理和判别,产生不同占空比的 PWM波形分别控制转向电机、前进与后退电机。路程计算模块则采用霍尔传感器,对车轮的转数计数,最后计算出总的行驶路程。系统结构如图1所示。

图1 系统结构图
2 硬件系统设计
2.1 电源电路
电源模块使用灵活方便的单电源供电方式,这种供电方式非常简单和方便,通过7805芯片稳压芯片提供5伏电压,分别给路面检测电路,车速检测电路和LED显示电路供电,而电机驱动模块中的马达则直接由干电池供电(如图2)。

图2 电源电路
2.2 电机驱动电路
直流H桥功放电路是用于控制电机正转和反转的基本电路,此电路可使电机通过输入端的改变来控制电机的转向。本设计中小车采用后轮驱动控制进退,前轮通过转向电机控制方向。因此通过对电机转向的控制可以实现小车的前进与后退以及前轮的左转和右转。电路如图3所示。

图3 电机驱动电路
2.3 路面检测电路
此模块使用反射式红外光电管作为车头的传感器,当反射式红外管扫过路面的颜色较深的线时,受反射光线强弱的影响,异或门的输出电平会发生改变,并将此电压信号的变化传递给单片机,单片机经过处理后再控制电机电路,调整小车的方向和车速。电路如图4所示。
2.4 车速检测
车速检测通过装在小车后轮上的霍尔传感器将车轮转过的圈数以电信号的形式传递给单片机,然后单片机计算出小车行驶的路程,最后将路程显示在LED管上。电路如图5所示。

图5 车轮计数电路
3 软件系统设计
软件系统主要是完成一个决策和导向的功能,其主要设计思想是根据小车传感器传回的信号确定小车的位置和车速,再调整电机的转向和转速,改变小车的位置和车速,主要包括路面探测子程序、路程计算和LED显示子程序以及电机驱动子程序。
3.1 路面探测子程序
本设计的跑道模型中,以黑线作为跑道中的标志。小车通过车头两个朝下的红外传感器检测黑线来确定自身位置,如果两个传感器同时感应到黑线,则表示小车进入加速或限速区,同时调整后轮的驱动电机改变速度。如果只有一个传感器感应到黑线,则表示小车有一边即将出界,同时调整前轮的转向电机来控制方向。程序流程如图6所示。
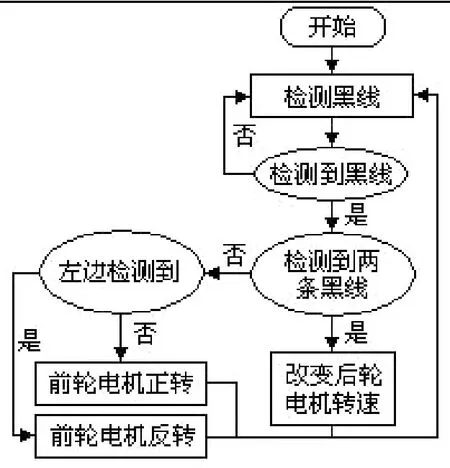
图6 路面探测流程图
3.2 路程计算和LED显示子程序
路程主要是根据后轮霍尔传感器传回的车轮转过的圈数计算得出。后轮每转一圈,程序中用来储存圈数的变量就自动加一,最后再乘以轮胎周长算出行驶距离。程序流程如图7所示。
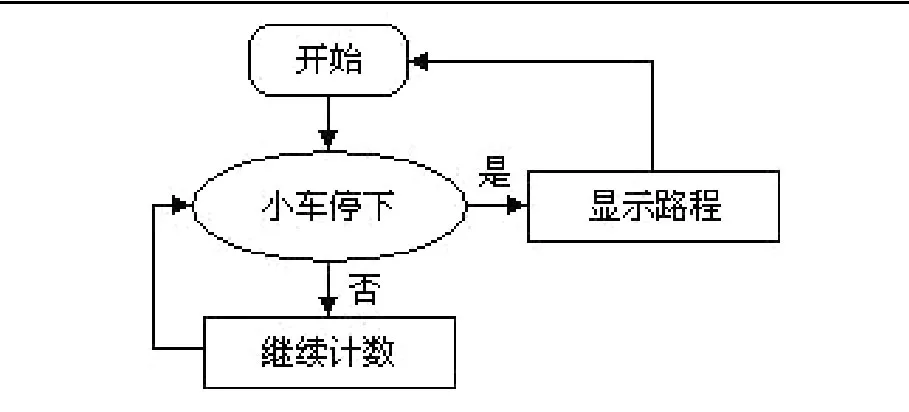
图7 路程显示流程图
3.3 电机驱动子程序
本设计中小车有两个电机,一个装在后轮控制车速,一个装在前轮控制方向。子程序根据主程序中传递的变量来判断此时该控制后轮电机还是前轮电机。实现对小车运动状态的改变。程序流程如图8所示。

图8 电机程序流程图
3.4 系统流程

图9 主程序流程图
小车的软件系统主要是由以上几个子程序构成,将这几个子程序合在一起构成的主程序流程图如图9所示。
4 结语
本设计中小车采用模块化的设计思想,各模块间独立性强,经过测试,小车能很好地完成所有功能,满足自动寻迹的设计要求,对路程的显示可以精确到0.01m。
[1] 吴景华.智能小车[J].轻工机械,2007,10(25):73-75.
[2] 胡大可.MSP430系列16位单片机原理与应用[M].北京:北京航空航天大学出版社,2000.
[3] 谭永辉,张辉.智能寻迹小车的研究与设计[J].微计算机信息,2008,8(24):310-312.
[4] 胡大可.MSP430系列单片机C语言程序设计与开发[M].北京:北京航天航空大学出版社,2002.
[5] 田拓,郭中华,丁帅华,等.基于 A T89C52单片机智能小车的设计[J].宁夏工程技术,2005,12(4):334-336.
[6] 陈懂,金世俊.智能小车的多传感器数据融合[J].现代电子技术,2005,3(197):3-5.
Design and Implementation of Intelligent M in i-car Based on MSP430
Chen Jingjing
(School of Physics and Electromechanical Engineering,Longyan University,Longyan,Fujian 364012,China)
This paper introduced a method of designing intelligent mini-car based on MSP430 MCU.The MCU
the signal which was collected and transmitted by the sensors fixed in front of the car,and then control the orientation of the motor that can make the car going ahead or changing the direction.The system hardware and software of the car were given in the paper.According to the test,the mini-car functioned well.The design can be used in automatic parking system and factory transporter.
intelligent mini-car;sensor;MCU;detection of the road
TP24
A
1671-2544(2010)06-0055-03
2010-05-22
陈晶晶(1982— ),女,福建龙岩人,龙岩学院物理与机电工程学院教师,硕士。
(责任编辑:陈锦华)
猜你喜欢
中学生数理化·七年级数学人教版(2022年3期)2022-03-16
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
数学小灵通·3-4年级(2020年6期)2020-06-24
小学生学习指导(高年级)(2019年6期)2019-01-11
发明与创新·小学生(2018年12期)2018-12-29
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
