
骑行下肢外骨骼结构与造型舒适度设计研究
2024-12-31 00:00:00蒋沛原吕健陈诚
设计 2024年23期







摘要:针对下肢外骨骼结构功能固化和造型主观舒适度难以满足人机要求等问题,本文基于骑行姿势提出了一种结构与造型相结合的外骨骼设计方法和舒适度验证方案。基于骑行中的运动学和仿生人机分析,提取出外骨骼需要满足的结构因素。再通过感性工学和设计美学在结构基础上进行造型因素分析和方案设计。基于JACK,从外骨骼的穿戴和交互舒适度出发,对人体下背部人机匹配性等进行结构功能舒适度验证。并对外骨骼方案进行主观舒适度验证。基于骑行姿势结构与造型相结合的外骨骼设计方法。可以设计出既满足结构功能,又满足造型主观舒适度要求的迭代性外骨骼方案,为下肢外骨骼设计与研究提供指导作用和积极意义。
关键词:骑行姿势;运动学;下肢外骨骼;感性工学;JACK;舒适度验证
中图分类号:TB472 文献标识码:A
文章编号:1003-0069(2024)23-0070-05
引言
随着现代心脑血管疾病、人口老龄化以及车祸机械性损伤等造成的人体下肢运动功能受损人群数目与日俱增,且医疗供给能力短期内无法实现巨大提升的情况下。外骨骼作为典型的人机交互系统,可以广泛用于下肢康复性训练,提供有效解决办法和现实意义。目前,针对外骨骼的设计主要集中于控制算法和机械结构设计,缺乏创新和设计感,且愈趋同质化。一个新颖的外骨骼设计方向和满足用户感性需求的造型设计方法显得尤为重要。骑行作为一种关节友好的活动,且极具性价比和时间效率的运动方式,其稳定的循环运动方式可与外骨骼相结合。从而提供一个基于骑行步态的下肢康复以及运动训练与外骨骼相融合的新方式。目前,针对下肢外骨骼的设计主要围绕步行步态进行。Steven H.Collins 根据踝关节运动方式,设计与小腿肌肉平行作用的无动力踝关节外骨骼,卸载肌肉力量,从而减少收缩时消耗的代谢能量[1];Celebi提出具有3 个主动转动副组成的一种主动膝关节康复外骨骼,可实现矢状面内的一个转动自由度和二个移动自由度[2];张素航等基于外骨骼机械结构进行外壳设计与拼接[3]。针对骑行的研究有谢宏宇基于骑行状态进行下肢运动学和动力学研究,提出人-车连杆模型[4];Ronnapeehaichaowarat 等为了减少骑行的能量消耗同时不消耗额外的能源,设计了膝关节外骨骼,能够有效降低骑行中股直肌的能量消耗[5]。上述关于外骨骼和骑行的研究均有各自的特点,一方面,注重人机理论上的高匹配性,另一方面,强调外骨骼对人体的助力效果,也有关于外观方面的优化尝试。但均未考虑将创新性外骨骼结构功能要求和造型主观需求相融合的设计方式。下肢外骨骼进入一个基于步行步态机械性结构功能设计的固化领域。通过对比和分析现有研究发现,运用感性工学方法能够有效地将用户对产品的感性认知进行设计要素转化。通过建立和分析外骨骼设计的感性语汇空间,进一步明确外骨骼设计目标,对于更好地指导和确定设计方案有着积极意义。
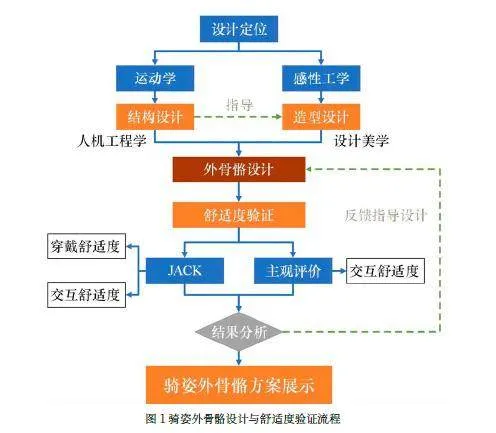
针对以上所提出的外骨骼结构功能同质化和造型主观舒适度难以满足的设计趋势。本文基于骑行姿势进行下肢运动学研究与仿生结构功能提取,并融合感性工学和设计美学进行下肢外骨骼方案设计。再利用JACK[6] 和主观评价法对外骨骼进行舒适度验证和评估。进而设计出既满足结构功能,又满足造型主观舒适度要求的融合式迭代性外骨骼方案,探索并完善结构与造型相融合的外骨骼设计方法和验证方案。为下肢外骨骼的设计研究提供差异性迭代新思路,研究流程如图1 所示。
一、结构功能人机分析
功能是研究所有产品的基础,而结构是功能得以实现的主要方法。对康复、医疗、体育锻炼和下肢外骨骼设计研究均有着十分重要的意义。为满足骑姿外骨骼的结构功能,基于骑行运动学和仿生设计对外骨骼结构进行研究。从骑行运动生物力学的研究[7] 来看,运动学建模由关节空间到工作空间的映射关系[8]。因此,结合骑行运动特点,以下研究基于五杆模型进行:
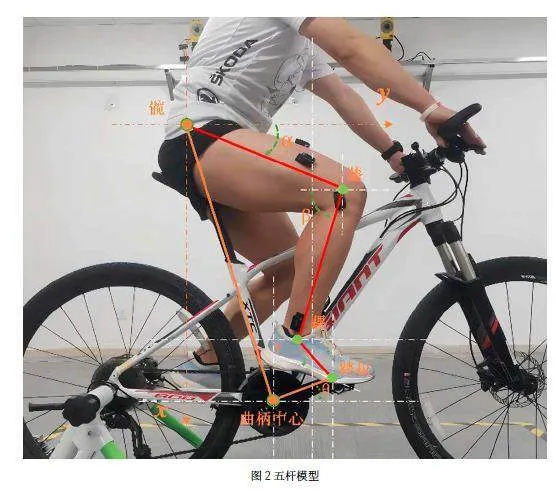
(一)五杆模型建立。骑行是下肢围绕髋关节进行的绕横轴在矢状面内完成的运动,故本文的研究主要基于下肢绕横轴的踩踏循环动作进行。研究发现,人体骨骼在承受弯曲应力及拉压应力时的特性表现同普通刚性材料类似,则可将大小腿和脚等效为刚性杆件[9],从而建立五杆模型。综上,将人体下肢骑行动作简化成如图2 所示五杆模型。
为建立科学的数学模型,根据国家标准《GB-T 17245-2004 成年人人体惯性参数》赋予人体骑姿下肢五杆模型参数[10]。
(二)骑行运动学。本骑行模型研究主要针对右下肢进行。基于以上简化的五杆骑行模型,骑行运动中各部位运动学方程如下:
以髋关节H 为点建立坐标系xHy,中轴中心O 坐标即为(Xo,Yo)。
由位移方程得:
L cosα-L cosβ+L cosγ-L cosθ=yo
L sinα+L sinβ+L sinγ+L sinθ=xo
由于模型是一个五连杆机构,因此需要两个约束条件来指定连杆构型。为研究骑行过程中髋关节踩踏循环能耗变化与曲柄转角θ 之间的联系,则根据Hull and Jorge[11] 的研究确定。一个是测量的曲柄角。另一个是由测量到的相对踏板角。
θ-γ-δ+π/2=0
其中ζ 是踏板和曲柄之间的角度,ε 是曲柄相对于垂直方向的角度δ 是脚中部和踏板之间的角度。膝角(β)和髋角(α)被描述为7 个几何常数的函数。
基于以上运动学公式,运用牛顿- 欧拉迭代公式:
进行计算可得人体下肢步行时髋关节和膝关节屈/ 伸自由度力矩范围分别为(-33,62)N·m 和(-16,64)N·m[12]。可知,骑行姿势针对髋关节进行外骨骼设计研究显得尤为重要。
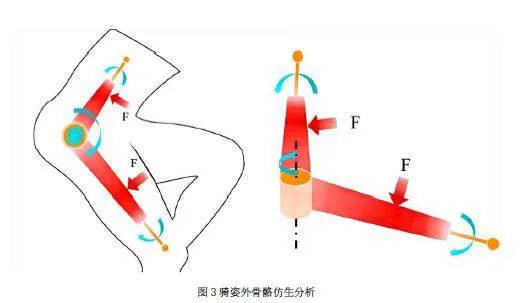
(三)仿生结构设计分析。骑姿外骨骼采用仿生机构设计方法,选取坐姿第95 百分位男性和第5 百分位男性作为身体尺寸的最大和最小值。下肢外骨骼的尺寸应能够根据使用者下肢尺寸进行设计,有利于增大外骨骼的适用人群舒适度。依其运动学分析,可知骑行过程中下肢作绕髋关节循环运动。故骑行外骨骼设计主要围绕髋关节进行,如下为骑行受力示意图。其中,大腿为主要骑行输出,故集中于绕髋关节的大腿张合动作,以及腰部与大腿的承力结构进行外骨骼的结构设计。考虑到用户在骑行起止时需要在横状面上进行腿部张合,故外骨骼在髋关节处添加一个横轴自由度设计,如图3 所示。
综上,本文基于骑姿五杆模型的运动学研究以及仿生机构学的特点,对下肢外骨骼的结构特征进行全面的分析和研究。从而明确满足人机舒适度的骑姿外骨骼结构设计特征及调节范围。
二、造型设计要素分析
本文提出的基于骑行姿势的下肢外骨骼舒适度设计方法,研究重点不仅在于实现结构功能上的人机舒适度,还在结构基础上融合感性工学[13]。将使用者对产品的感性意象进行定量表达,并将之与外骨骼设计特性相联系。以实现在外骨骼设计中体现“人”的感受,从而设计出符合目标用户期望的外骨骼方案[14]。
(一)需求定位分析。本研究旨在将外骨骼结构和造型舒适度设计与下肢康复及运动训练相结合。在外骨骼的结构和造型融合设计中,需要兼顾运动员的助力需求和康复患者对安全性能的要求。故本研究的目标定位主要针对具备一定骑行基础、较高接受能力的骑行运动员以及轻度下肢运动损伤人群进行下肢助力外骨骼设计研究。
(二)设计特征提取
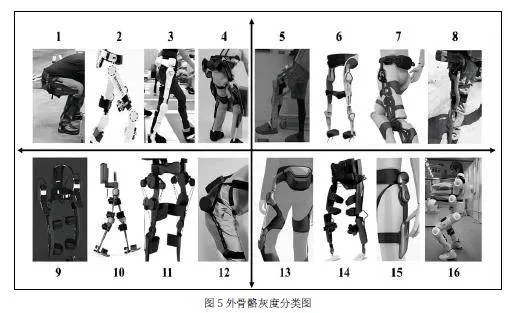
1. 从官方网站、文献、专利等处收集一系列的下肢外骨骼图片。筛选、去除不清晰、相似的产品,得到16 个较具代表性和全面性的产品,如图4 所示。根据前述结构分析,骑行姿势外骨骼的设计主要针对髋关节和腰部穿戴结构进行研究。
通过坐标排序法[15](Coordinate Sorting),将收集到的图片根据设计特征划分为4 个大类:块状、机械结构、线型和曲面造型,并进行编号。再对图片进行灰阶处理,如图5 所示。以防止色彩对外骨骼感性意象的干扰,从而更准确地评估人们对外骨骼设计的感性意象。
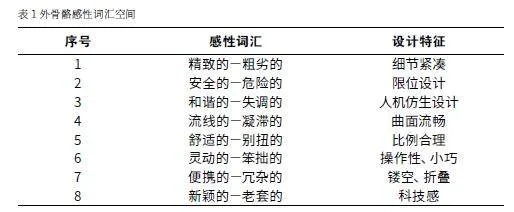
2.感性词汇。在收集了大量使用者和设计师对各类外骨骼描述的感性词汇后,本研究采用KJ 法进行筛选和整理,剔除了语义相近或与设计特征关联性较弱的部分。由于外骨骼设计与普通产品设计流程存在差异,需要兼顾造型美观及结构功能协调。本文通过与贵州航天控制技术有限公司6 名专业外骨骼设计工程师及13 名具备一定外骨骼设计经验的工业设计与机械专业硕士研究生讨论研究,针对外骨骼设计特征对感性词汇进行分类和提炼。最终,确定了8 组具有代表性的感性词汇,并将其与外骨骼设计特征进行匹配,建立了外骨骼设计的感性词汇空间,具体如表1 所示。
(三)感性词汇数据分析。
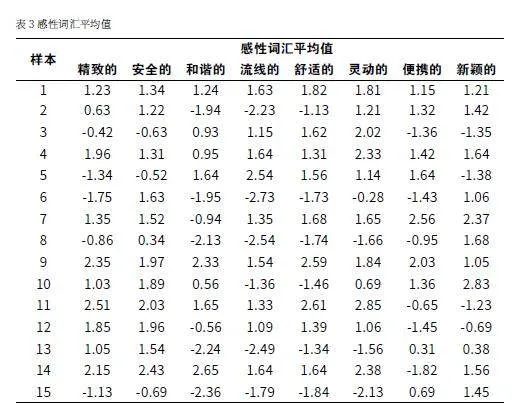
1.问卷调查及统计:对确定的8组感性词汇进行量化。设计调查问卷,构建如表2 所示7 级李克特量表评价尺度。其中,将“精致的”“安全的”“和谐的”“流线的”“舒适的”“灵动的”“便携的”“新颖的”对应分值设置为3,对应的词汇设置为-3。量化分值越接近分值极限说明越贴合调研对象对外骨骼的感性认知。实际发放问卷60 份,其中男性35 人,女性25 人,具备工业设计背景13 人,机械设计背景19 人,其余人为随机样本。回收有效问卷数为53 份,对53 份问卷进行数据统计分析,得到16 个外骨骼样本的感性词汇平均值[16],如表3 所示。
借助SPSS 对数据信度进行检验,得到的克隆巴赫系数为0.798,说明问卷信度较好,可以进一步对数据进行分析。
2.主成分分析及因子分析:用SPSS 软件对均值结果进行KMO 检验系数和巴特利特(Bartlett)球形检验,检验出的KMO系数为0.685gt;0.5,且Bartlett 球形检验的显著性系数P 值为0.000lt;0.050,说明样本数据适合作主成分分析及因子分析[17]。
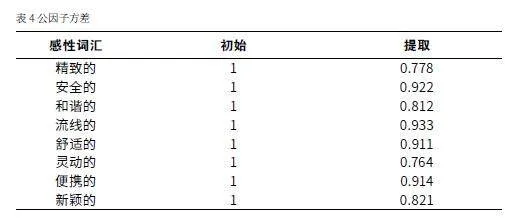
通过主成分分析法对数据进行降维分析,公因子方差如表4 所示。各变量的提取值均大于0.778,且大部分大于0.9,公因子提取效果较理想,说明因子分析结果有效,可对感性词汇平均值数据进行主因子分析。
总方差解释显示主成分因子对总体变量信息的解释程度,选择特征值大于1 的因子作为主因子。由表5 可知,因子1、因子2、因子3 的特征值均大于1,且累加贡献率达到了85.682%,能够充分概括16 款外骨骼的造型与结构设计特征。
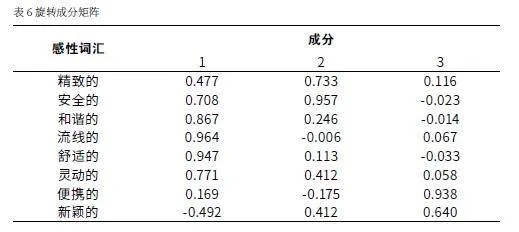
为分析3 个主因子的特点和命名,利用凯撒正态化最大方差法对因子载荷矩阵进行旋转,旋转在5 次迭代后已收敛[18],得到旋转成分矩阵表6。
3.结果解释分析:主成分分析和因子分析的结果显示。用户对外骨骼的“曲面流畅”“人机仿生设计”“比例合理”“限位设计”和“镂空、折叠”设计特征感知较为强烈。表示这些特征在外骨骼设计中的指导作用也更加突出。其中,因子1 中曲面流畅、人机仿生设计和比例合理为主要贡献变量,反映用户对外骨骼外观造型的感知,则将因子1 命名为外骨骼设计“外观因子”;因子2 中限位设计为主要贡献变量,反映用户对外骨骼在结构方面的可靠性感知,则将因子2 命名为“安全因子”;因子3 中镂空、折叠为主要贡献变量,反映用户对外骨骼在使用和携带方面的感知,则将因子3 命名为“轻量因子”[18]。
三、骑姿助力外骨骼设计
基于以上骑行姿势运动学与感性工学研究结果解释分析,可以明确外骨骼的设计目标。
(一)设计目标
1. 仿生设计:在保证骑行姿势结构自由度的基础上,外骨骼的外观因子应侧重于人机仿生研究,外骨骼应该与人体的曲线和形状相匹配,以减少不适感和压力点。外骨骼的造型应该考虑到人体的解剖结构和运动学原理。外骨骼设备应该与人体的关节和骨骼系统相协调,以提供最佳的支持和运动自由度。
2. 安全性与舒适性:安全因子需注重限位等可靠性安全设计,为实现轻量因子,设计应在满足强度和功能要求的前提下,最大限度地采用镂空、折叠等设计方式。并增加限位装置和可调节部位让不同用户根据自身特点来调整舒适度,减少长时间佩戴时的不适感。
3. 美学和社会接受度:外骨骼设备的主要设计目的是其功能性所决定的,但其外观设计也是重要的考虑因素。外骨骼的造型应该符合主流审美标准,并在社会上得到接受。外骨骼的外观可以通过颜色、纹理和外部附件等元素进行个性化和定制
综上所述,本研究融合结构要求和感性需求设计出一款适用于骑行姿势的下肢助力外骨骼,设计方案如图6 所示
(二)设计方案分析
本设计方案在腰部和大腿部设置承力装置。其次,利用人机仿生原理,设计人体接触部位的拟人形式,实现最大程度的贴合。整体采用曲面造型,呈现流畅且和谐的外观特点,为用户提供舒适的感性认知。此外,设计限位装置和可调节部件以满足外骨骼安全性要求。最后,在保证结构强度的前提下,对外骨骼进行镂空处理,并增加折叠及快速调节功能,以提供高效交互体验。
该初始方案中主要以腿部支撑件为主,验证其可靠性后,对其整体进行重新设计,并通过软件进行渲染,重新制作腰部支撑设计,使用仿腰部曲面,并在衔接处采用限位设计,使产品使用更加安全可靠,产品渲染效果图如图7 所示。
根据不同使用者的需求,外骨骼需满足髋膝关节间长度可以快速调节的形式。经设计研究,提出调节大、中、小3 种腿部支撑件的方式满足人机匹配度要求并对连接处进行快拆设计,以便使用过程中进行更换。用JACK 软件测量第95 百分位和第5 百分位人体模型髋关节到膝关节的尺寸,以适应不同下肢尺寸的使用者。根据3 种腿部支撑件的尺寸,外骨骼能够满足400 ~ 480mm 不同大腿长度的使用对象。从人机匹配度方面使外骨骼满足结构舒适度要求[19]。
四、舒适度验证
(一)场景构建
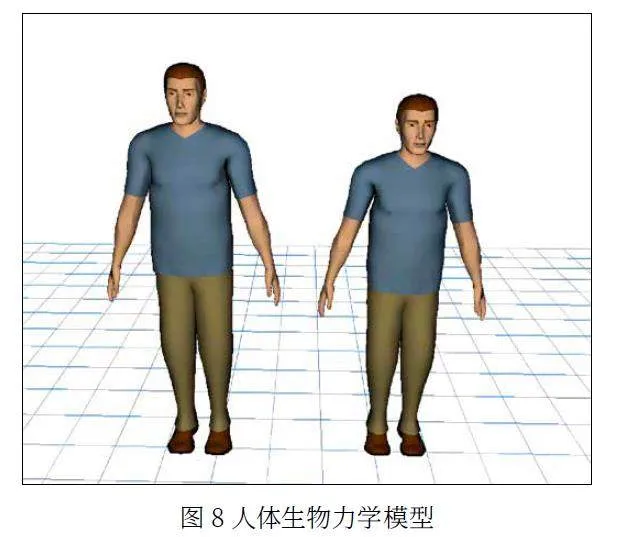
1. 人体模型建立:为了满足大部分骑行者的操作要求,以第95 百分位人体尺寸作为设计上限,第5 百分位人体尺寸作为设计下限[20]。在JACK 的三维人体数据库中,以GB10000—1988 为参考,建立骑行姿势第95 百分位和第5 百分位的人体数据模型,如图8 所示。
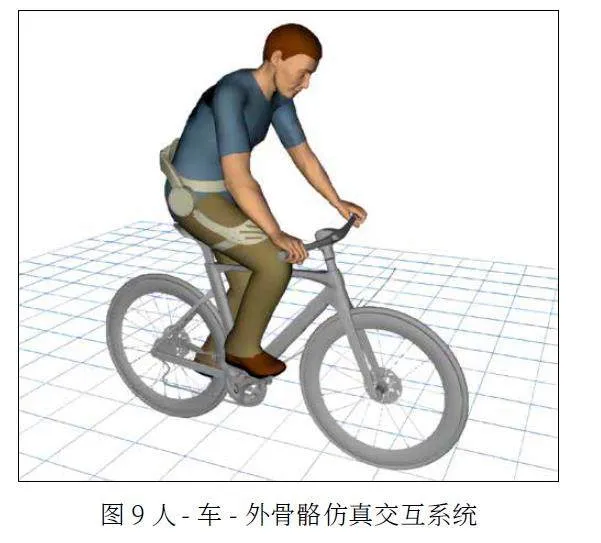
2.虚拟仿真模型建立:在Rhino 软件中构建自行车和外骨骼模型,然后再导入JACK 中。并将人体、自行车模型与设计的外骨骼进行约束和调整,使其成为如图9 的一个人机交互系统。进行接下来的舒适度验证研究。
(二)穿戴舒适度验证
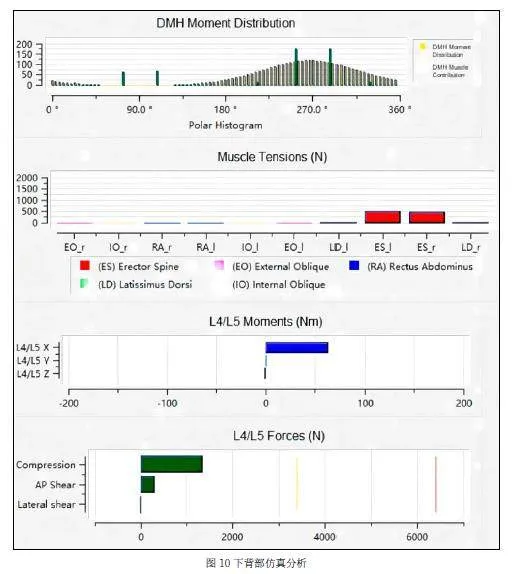
1. 下背部受力分析:骑行姿势下,腰部是较容易疲劳的部位,而穿戴助力外骨骼会对人体腰椎产生压力,Lower limb analysis 能分析运动时腰椎4L/5L 所受的压力。下背部受力分析能确定外骨骼对人体腰部受力的舒适度研究。从而达到更科学的外骨骼舒适度评价,如图10 为下背部仿真分析结果。
分析显示在穿戴外骨骼的状态下腰部竖脊肌拉力为467N,背部压缩力为1430N。两者均远低于NIOSH 的极限值。穿戴骑姿外骨骼时下背部受力处于舒适范围,结构功能满足人体受力舒适度需求[21]。
2.Comfort Assessment 舒适度分析:在骑行运动中,所有主要腿部肌肉群协作共同推动踏板。穿戴外骨骼后,会对下肢的各关节受力产生影响。通过Comfort Assessment 工具中的单关节Porter 舒适度研究,评价骑行姿势下肢外骨骼对关节及骑行姿势的舒适度[21]。本文针对骑行时完整周期内的两个主要状态(曲柄上死点、下死点)进行舒适度仿真分析,以评价骑行过程中下肢各关节舒适度情况,如图11 所示。
图中数值接近0 是最舒适的关节角度,绿色代表关节角度在限定的关节弯曲范围内。黄色代表关节角度超出了舒适度范围。上、下极限Porter 图中,基本满足人体舒适度要求。其中,上极限的右小腿和下极限左膝盖略高于限定关节角度,舒适度较低,但均在人体可接受范围内。
(三)心理舒适度验证
心理舒适度感性认知,特别是设计美学以及造型舒适度等主观评价准则,很难让程序去进行评价,需要人为判断[22]。本研究在融合结构与造型需求的外骨骼设计方案完成后,采用问卷调查的形式对方案进行感性心理舒适度评估。由于外骨骼方案是依据感性词汇所对应的造型特征而进行设计的,故在收集时不采用所提到的8 对感性词汇进行评估,只针对(舒适的—不适的)这一对感性词汇进行测量。共33 人参与评价,有效问卷为31 份。通过SPSS 进行均值和标准差分析,结果显示73.6% 的被调研者对该外骨骼方案结合的方法制定下肢外骨骼舒适度设计方案能够较好地满足用户的舒适度需求。
并且在问卷调查中,调研对象对于外骨骼的限位设计和曲面镂空设计等均展现出极强兴趣和接受度,体现本外骨骼设计方案满足用户的基本功能和舒适度需求。
结论
本文针对外骨骼结构功能和造型感性舒适度难以满足人机要求以及外骨骼设计同质化等问题。首先,提出了基于骑姿进行的下肢外骨骼设计,解决了外骨骼设计方向固化的问题,并进行了骑姿运动学研究,为相关设计提供了理论基础。其次,基于骑行姿势,提出融合结构功能需求与造型感性需求的外骨骼设计方法。将外骨骼设计的工程性与美学性相结合,从而设计出迭代性外骨骼方案。最后,提出基于Jack 仿真分析和主观评价相结合的舒适度验证方案,证明该设计方法能够为下肢外骨骼设计与研究提供指导作用和积极意义。
基金项目:国家自然科学基金:52065010
贵州省科技项目:黔科合基础-ZK[2021] 一般341;黔科合支撑[2022] 一般197
参考文献
[1]Collins S H,Wiggin M B,Sawicki G S. Reducing the energy cost of human walking using anunpowered exoskeleton[J]. NATURE,2015,522(7555):212.
[2]Celebi B,Yalcin M,Patoglu V. ASSISTON-KNEE:A Self-Aligning Knee Exoskeleton[J]. 2013 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS(IROS),2013:996-1002.
[3]张素航. 下肢康复外骨骼造型及APP界面设计[D]. 东南大学,2017.
[4]谢宏宇,崔建昆,俞佳,等. 自行车骑行状态的运动学与动力学研究[J]. 农业装备与车辆工程,2020,58(08):112-117.
[5]Ronnapee C,Jun K,Kazuhiro K. Unpowered Knee Exoskeleton Reduces Quadriceps Activityduring Cycling[J]. Engineering,2018,4(4).
[6]师勇,徐格宁,辛运胜,等. 基于JACK仿真的电动单轨吊司机室人机工程分析[J]. 中国工程机械学报,2023,21(02):139-144.
[7]Li C,Liu D,Xu C,et al. Sensing of joint and spinal bending or stretching via a retractable andwearable badge reel[J]. NATURE COMMUNICATIONS,2021,12(29501).
[8]Du Z,Fang H,Xu J. Snake-worm:A Bi-modal Locomotion Robot[J]. JOURNAL OF BIONICENGINEERING,2022,19(5):1272-1287.
[9]Niechcial M,Rybarczyk D,Buskiewicz J. Modelling the monopedal robot[J]. IV INTERNATIONALCONFERENCE OF COMPUTATIONAL METHODS IN ENGINEERING SCIENCE(CMES’19),2019,710(012030).
[10]中国标准化与信息分类编码研究所. 中国成年人人体尺寸[S]. 国家技术监督局,1988.
[11]Hull M L,Jorge M. A method for biomechanical analysis of bicycle pedalling.[J]. Journal ofbiomechanics,1985,18(9).
[12]缪云洁. 新型下肢外骨骼的机构性能设计方法研究[D]. 上海交通大学,2015.
[13]Nagamachi M. Kansei engineering as a powerful consumer-oriented technology for productdevelopment.[J]. Applied ergonomics,2002,33(3).
[14]苏建宁,江平宇,朱斌,等. 感性工学及其在产品设计中的应用研究[J]. 西安交通大学学报,2004(01):60-63.
[15]梁艳红,檀润华,马建红. 面向产品创新设计的专利文本分类研究[J]. 计算机集成制造系统,2013,19(02):382-390.
[16]伍赛,涂细凯,李佳璐,等. 下肢康复外骨骼的造型与结构优化设计研究[J]. 机械科学与技术,2020,39(06):891-897.
[17]刘文庆,吴晶,马佳敏,等. 清代粉彩纹样在汉服设计中的感性工学应用[J]. 毛纺科技,2023,51(04):69-75.
[18]曹玉姝,崔庆康,项松. 基于感性工学的通用飞机涂装设计方法研究[J]. 包装工程,2023,44(02):48-55.
[19]余从刚,杨雯卉,朱璐莎. 人因模拟的腰部助力外骨骼机器人舒适性设计[J]. 包装工程,2021,42(08):36-44.
[20]李晓英,谢逸飞. 基于FMEA与Jack的医用转移床虚拟仿真设计与研究[J]. 制造业自动化,2023,45(01):195-200.
[21]周艾,张建敏,杨勤,等. 基于JACK的工业搬运车驾驶室人机工程仿真分析[J]. 机械设计,2020,37(01):26-34.
[22]刘炯宙,李基拓,陆国栋. 色彩语义驱动的产品交互式遗传配色设计[J]. 计算机辅助设计与图形学学报,2012,24(05):669-676.
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25 06:57:18
电子制作(2019年15期)2019-08-27 01:12:16
制造技术与机床(2018年11期)2018-11-23 01:07:50
现代商贸工业(2017年34期)2017-12-09 07:57:45
设计(2017年17期)2017-11-09 12:08:29
设计(2017年11期)2017-10-31 04:15:49
艺术科技(2016年11期)2017-05-05 18:55:11
企业导报(2016年20期)2016-11-05 19:23:30
青春岁月(2015年21期)2015-12-15 11:39:42
海军航空大学学报(2015年1期)2015-11-11 17:18:37
