
基于案例设计的课程理论与实践综合教学探索
2024-12-18 00:00:00许静静刘志峰初红艳程强
教育教学论坛 2024年44期
关键词:案例设计


[摘 要] 新工科背景下,“工业机器人基础”课程教学不仅要提高学生的理论知识水平,还要培养理论应用能力及创新能力,现有的相关课程教学尚未实现理论与实践的紧密结合,为此,进行基于案例设计的“工业机器人基础”课程理论与实践综合教学探索。该方案通过设计案例将运动学建模、运动规划等内容应用于实际工业机器人进行离线仿真实训和实操实训,通过仿真生成轨迹的实际验证,实现仿真与实操的联合实践,并提出了相应的课程教学模式及考核方式。经过两轮课程教学发现,该课程体系可有效提升学生的理论应用、离线仿真、实际操作等综合能力。
[关键词] 工业机器人基础;理论与实践综合;案例设计;课程教学模式
[基金项目] 2022年度北京工业大学教育教学研究课题“新工科背景下机械工程本硕博贯通培养创新模式研究”(ER2022RCB02);2023年度北京工业大学“三全育人”教师团队重点培育项目“‘三全育人’视域下高端装备协同创新科研育人模式研究”
[作者简介] 许静静(1990—),女,山西临汾人,工学博士,北京工业大学机械与能源工程学院讲师,主要从事工业机器人相关教学与科学研究;程 强(1979—),男,山东济南人,工学博士,北京工业大学机械与能源工程学院教授(通信作者),主要从事工业机器人相关教学与科学研究。
[中图分类号] G642.0 [文献标识码] A [文章编号] 1674-9324(2024)44-0101-04 [收稿日期] 2024-02-02
引言
与传统工科相比,新工科更强调学科的实用性、交叉性与综合性。在当前新工科背景下,智能制造业的快速发展对机械工程专业课程改革提出了更高的要求,其中工业机器人作为智能制造业发展的关键元素,使得“工业机器人基础”课程成为重要改革对象,现有研究在课程思政融合、实践课程设计、教学模式改革等方面进行了深入探索,如余娜[1]针对“工业机器人技术基础”课程设计了课程思政点,并探讨了具体实施过程及方法;刘小波[2]以“工业机器人基础”的矩阵初步、运动学、控制与传感技术、构造及传动原理等理论为基础,提出了包含软件计算和操作实践在内的24学时实践课程探索;黄广伟等人[3]针对新工科背景下“工业机器人技术基础”课程教学内容陈旧、教学方法落后、考核方式单一等问题提出了具体的实践教学改革措施,并从学生积极性、实践能力和毕业后平均薪资水平方面进行了改革实施与效果分析;谭文君等人[4]在加强师资力量建设、活页式高质量课程教材开发、教学模式创新方面提出了具体的“工业机器人技术基础”课程改革措施。基于以上方法的提出及应用,为提高“工业机器人基础”课程教学质量、促进适应新工科背景提供了有效的改革思路及方法。为了进一步适应新工科背景,论文提出了一种理论与实践紧密融合的混合教学课程方案,以工业机器人系统理论知识的讲解为基础,以运动规划应用为实践案例进行“离线仿真+机器人实操”相结合的实践部分方案设计,提高大学生在工业机器人创新及应用方面的综合能力,从而为推动制造业智能化转型升级提供可用人才。
一、“工业机器人基础”课程目标及内容设计
(一)课程目标设计
“工业机器人基础”的教学目的和任务是通过课堂教学和实操演示,使学生掌握工业机器人分类及相关的共性基础知识和应用分析,掌握工业机器人系统一般组成与运动原理,初步学会工业机器人运动学/轨迹规划问题求解的基本方法,掌握工业机器人控制系统和离线编程技术,通过实操演示了解工业机器人系统及典型应用,培养一定的分析能力和初步的实验能力。该目标分解为以下三个子目标。
1.掌握工业机器人基本概念、系统组成、数理基础、运动学建模及运动规划、控制系统结构与工作原理、工业机器人应用前沿案例,了解机器人基础理论及未来发展趋势。
2.了解工业机器人离线编程的特点与常见编程软件,以国产PQArt离线编程仿真软件为例进行实训仿真操作,包括实训工作站创建、工作站逻辑设定和仿真调试等操作,通过仿真实验了解离线编程的基本过程与目的。
3.以工业机器人为实操对象,感性认识机器人的工作范围与主要参数、系统构成与作用,进行TCP(工具中心点)标定,验证离线运动轨迹,明晰实际示教过程。
(二)课程内容设计
课程内容分为理论部分与实践部分,其中理论部分支撑课程目标(1),实践部分支撑课程目标(7)和(8)。图1为理论与实践内容的章节分布及关联关系图,理论部分内容分为6章,其中1~4章理论内容与机器人仿真虚拟实训内容密切相关,1~5章理论内容与实操实训内容密切相关,通过理论与实践内容呼应达到理论指导实践、实践认识理论的教学目的,提高学习质量;第6章通过技术应用案例使学生对1~5章理论内容的应用进一步加深理解,并从机器人前沿应用拓展学生创新思维。
理论部分各章节教学内容如下。
1.工业机器人概述包括:工业机器人定义;工业机器人的发展进程;工业机器人常见分类方式(按结构坐标特性、拓扑结构、智能程度、驱动方式等分类);工业机器人典型应用(物流搬运、喷涂/焊接/激光加工、零部件装配、三维增材制造、去除材料加工、大型装备制造维修等)。
2.“工业机器人基础”知识包括:基本术语(包括关节类型、关节与连杆的关系、工具中心点、运动坐标系等);主要技术参数(机器人自由度、精度、定位精度、重复定位精度、机器人分辨率、工作范围等);工作空间分析方法。
3.工业机器人系统组成包括:机械臂分类和结构分析;常见的驱动装置;常见的传动装置;末端执行器的作用与分类;典型的内部和外部传感器装置、功能与工作原理;控制器和示教器基本组成、功能和典型产品。
4.工业机器人运动原理包括:数理基础(齐次坐标、刚度的位姿描述、平移和旋转坐标转换);运动学问题建模方法(运动学的基本概念,基于D-H表达的连杆状态描述方式、正运动学和逆运动学建模、解的存在性与多解问题);轨迹插值算法(多项式插值、分段多项式插值、B样条插值等);轨迹规划方法(运动规划的基本概念,运动规划例题讲解)。
5.工业机器人控制系统包括:控制系统结构和工作原理;常见的机器人控制方法(包括机器人单关节位置伺服控制、力控制、智能控制)。
6.工业机器人技术进展可包括:机器人与仿生设计;机器人与人工智能;机器人与数字孪生;机器人前沿应用等。
理论部分课程目标在于掌握机器人基本概念、工业机器人相关共性基础知识和应用分析方法、工业机器人系统组成;通过运动原理的学习,掌握机器人应用所涉及的运动学基本理论基础;通过控制系统的学习,了解机器人常见控制方法的基本原理;根据研究前沿案例分析,了解工业机器人技术未来发展趋势。
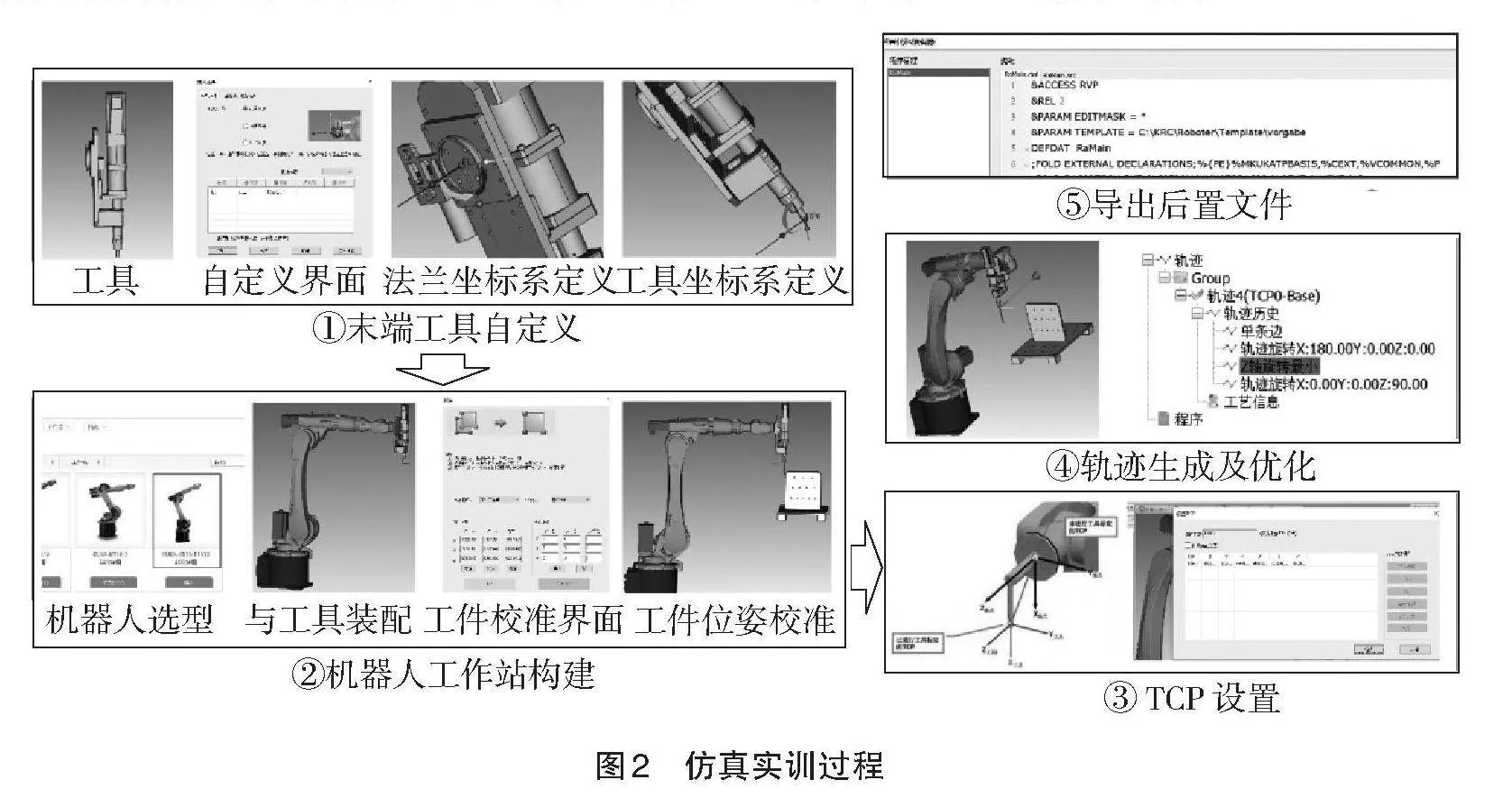
实践部分内容分为离线仿真实训和机器人实操实训两部分,其中仿真实训部分包括认识离线编程软件、PQArt仿真软件学习(包括界面认识、三维球基本操作、工件定位、工具自定义、TCP设置、轨迹生成及优化调整等),最后依据基于案例设计的仿真实训指导书完成工业机器人虚拟工作站构建、工业机器人工作轨迹的设计和虚拟仿真过程,在案例中,机器人虚拟工作站依据实操机器人工作站进行构建,即工件及工具依据实际结构进行建模,机器人与工件相对位置、TCP设置由实时操作系统标定获得;另外在轨迹设计中包含基于逆解的关节空间轨迹生成案例,该过程可实现机器人运动学建模相关的理论知识,从而达到理论指导实践的教学目的。图2为仿真实训过程图,具体以库卡机器人为实训对象,以螺栓拧紧装置为末端工具,以T型件为工件。
实操实训部分内容包括机器人基本操作介绍(包括机器人组成、人工示教过程、编程方法、编程基础、运动编程、逻辑指令编程、变量值操作和执行程序等)、学生手动操作机器人、TCP标定、KUKA机器人程序编制及执行、仿真轨迹实际验证。其中通过基本操作介绍、学生手动操作机器人和TCP标定等内容可帮助学生对机器人系统组成及工具坐标系等理论知识具有更深入的了解;另外仿真轨迹实际验证可使学生真正理解离线仿真的重要性和必要性,实现理论与实践的紧密结合,提高学生对工业机器人的创新与应用水平。图3为实操实训过程图,该过程场景与上述虚拟场景的完全映射使得知识更为系统,有助于提高学生对相关知识的理解能力。
二、教学模式与课程考核
课程以理论知识讲授为主,实践为辅(仿真实训和实操实训)。其中在讲授环节采用研究型教学模式,由工程实例和问题引出概念,自然进入相关内容的讲授;适当引导学生阅读文献与资料,培养自学能力;在实践环节,通过仿真实训加固理论知识,注重理论与实践要点的结合,培养学生以理论为基础、以离线编程为途径,以实际机器人为智能载体,全面掌握工业机器人基础技术。
课程考核包括平时成绩、实践成绩和大报告成绩三部分。平时成绩占10%,评分主要依据出勤情况、基本表现、作业情况等,主要反映学生的课堂表现、平时的信息接收和自我约束能力;实践成绩占30%,评分依据为仿真实训结果和实训报告、实操实训结果和基本表现,主要反映学生对离线编程、工业机器人实际操作技能的掌握程度,以及理论联系实际的能力;大报告成绩占60%,旨在培养学生对已学知识的应用能力,以及延伸知识的检索、自学和总结能力。该部分采用主观命题的方式,注重对基本概念、基本理论考查的同时,注重知识的应用,能够留给学生进阶的空间,并依据学生对理论知识的应用,从报告内容的全面程度、深入程度和规范程度考虑制定考核指标体系进行报告评价。
结语
针对新工科背景给“工业机器人基础”课程教学带来的挑战,且基于北京工业大学智能制造专业学生培养的需求,探索了基于案例设计的课程理论与实践综合教学方式,在教授理论知识的同时,将基础理论中系统构成、运动学建模、运动规划等关键知识点通过案例应用于实际机器人,并通过搭建工作场景、定义工具工件、生成离线轨迹等仿真操作,以及TCP标定和离线轨迹验证等实际操作实现了实践过程,最终达到了理论指导实践、实践认识理论的教学目标。该课程体系在北京工业大学智能制造专业的3轮“工业机器人基础”课程教学中得到了有效实施,在教授学生理论知识的同时,使学生具备了理论学习、理论应用及创新思维能力。
参考文献
[1]余娜.“工业机器人技术基础”课程思政教学探索[J].南方农机,2021,52(21):157-159.
[2]刘小波.工业机器人基础实践课程设计与探索[J].教育现代化,2018,5(43):152-156.
[3]黄广伟,张攀峰.新工科背景下“工业机器人技术基础”实验教学改革与实践[J].机械管理开发,2023,38(10):52-54.
[4]谭文君,杨天时,赵妍妍.工业机器人技术基础课程教学改革研究[J].农业工程与装备,2023,50(2):76-77.
Exploration of Integrated Teaching of Theory and Practice of “Industrial Robot Foundation” based on Case Design
XU Jing-jing, LIU Zhi-feng, CHU Hong-yan, CHENG Qiang
(School of Mechanical Engineering and Applied Electronic Technology, Beijing University of Technology, Beijing 100124, China)
Abstract: Under the background of new engineering, the teaching of “Industrial Robot Foundation” course should not only improve the theoretical knowledge level of students, but also cultivate their theoretical application ability and innovation ability. The existing relevant courses have not yet realize the close combination of theory and practice. In order to solve the above problem, the integrated teaching of theory and practice of “Industrial Robot Foundation” course based on case design is put forward. The case applies kinematic modelling, motion planning and other contents to the actual industrial robot for offline simulation and practical operation training through design cases, realizes the joint practice of simulation and practical operation through the actual verification of the trajectory generated by simulation and puts forward the corresponding course teaching model and assessment method. After two rounds of course teaching, it is found that the course system can effectively improve students’ comprehensive ability of theoretical application, offline simulation and practical operation.
Key words: Industrial Robot Foundation; joint of theory and practice; case design; teaching model
猜你喜欢
教育界·下旬(2016年10期)2017-03-31 11:11:42
新课程·中旬(2017年2期)2017-03-29 00:25:26
美与时代·美术学刊(2016年11期)2017-02-04 13:22:45
现代商贸工业(2016年28期)2016-12-27 09:31:49
电脑知识与技术(2016年22期)2016-10-31 19:52:57
科教导刊·电子版(2016年11期)2016-06-03 18:19:10
考试周刊(2016年18期)2016-04-14 09:38:54
电脑知识与技术(2016年2期)2016-03-22 14:03:00
中学课程辅导·教师通讯(2015年24期)2016-01-19 00:18:18
电脑知识与技术(2015年22期)2015-11-14 12:25:12
