
汽车毫米波雷达数据采集系统设计
2024-10-12 00:00:00张小卫刘熠荣
汽车与驾驶维修(维修版) 2024年9期
摘要:汽车盲点检测系统在高级驾驶辅助系统中扮演着至关重要的角色,其主要目的是检测车辆两侧及后方的盲区,帮助驾驶员规避潜在的危险。本文针对这一需求,设计并实现了一套基于毫米波雷达的数据采集系统。本文介绍了系统的实际需求、硬件架构设计、软件设计与实现,并结合MATLAB 工具对系统进行了测试,验证了设计的有效性和可靠性,本文的研究成果为提升汽车盲点检测系统的性能提供了参考,具有较高的使用价值。
关键词:汽车盲点检测;毫米波雷达;数据采集
中图分类号:TN952 文献标识码:A
0 引言
汽车行业正积极探索通过高级驾驶辅助系统[1](ADAS)、自动驾驶技术、车联网平台等前沿科技的应用,实现对车辆行驶状态的实时监控、预测与干预,从而有效降低交通事故风险。
毫米波雷达广泛运用于汽车驾驶辅助系统,它使用毫米量级的波长作为雷达的发射信号,具有系统组件尺寸小、抗干扰能力强、穿透能力强等优势。汽车盲点检测系统[2](Blind SpotDetection, BSD)是一种先进的驾驶辅助技术,通过毫米波雷达检测汽车盲区内的行人或车辆,通过告警的形式提示驾驶员注意,以此来减少交通事故的发生。
FMCW(调频连续波)技术则通过发射频率随时间线性变化的连续调频波信号[3],并接收回波信号,通过计算频率差来精确测量目标物体的距离和速度,具有高精度和高可靠性的特性,FMCW 雷达的调制方式一般分为快速斜波模式(锯齿波)和慢速斜波模式[4](三角波),两种模式选择基于硬件资源而定。
本文以毫米波作为传感器,32 位单片机作为控制处理器,采用快速斜波模式的FMCW 技术,探索一种运用于汽车盲点检测系统中的数据采集系统,解决盲点检测系统中毫米波雷达数据采集成本高、体积大及实时性差等问题。
1 汽车毫米波雷达数据采集系统总体设计
1.1 系统功能需求分析
汽车毫米波雷达数据采集系统设计运用场合是汽车盲点检测雷达,需要准确测量盲区内行人或车辆的距离、速度、方向等信息,根据是否存在威胁情况来提前预警,本文毫米波雷达数据采集系统无目标提取算法、航迹处理算法,只针对毫米波雷达的原始数据采集转换,如ADC 数据、距离维FFT、速度维FFT 等数据,将此数据上传PC 端显示。系统需符合以下要求:雷达原理为FMCW 技术;工作频率24.00 ~ 24.25 GHz ;带宽250.00 MHz ;持续扫频时间为153.6 μs ;调制方式为快速斜波模式(锯齿波);采样频率为833.30 kHz ;FFT 变换点数为128。
1.2 系统硬件架构设计
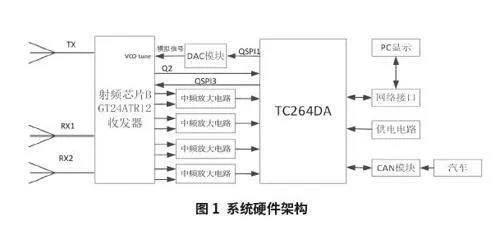
汽车毫米波雷达数据采集系统选用TC264DA 单片机作为控制核心,射频芯片采用一发两收机制的BGT24ATR12 收发器,射频收发器连接DAC 转换模块和中频放大电路模块,单片机外围模块有网络接口模块用于上传数据,CAN 模块用于提取汽车速度,其硬件原理架构如图1 所示。TC264DA 通过QSP1 协议控制DAC模块产生模拟信号,此模拟信号控制射频芯片VCO 的调制波形让射频收发器输出快速斜波模式的连续调频波,Q2 将调制频率信息反馈给单片机,此次修正模拟信号大小,形成闭环控制。
1.3 系统软件架构设计
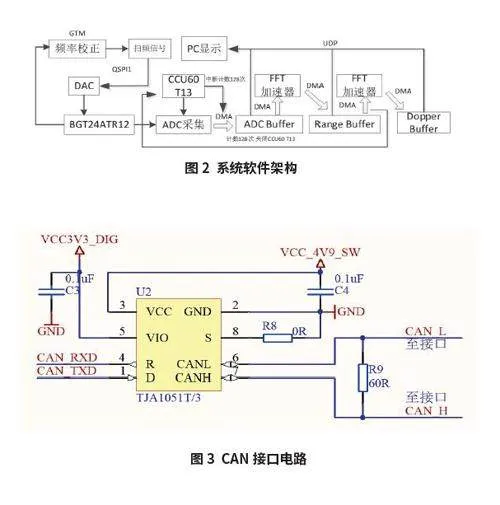
系统软件架构设计框图如图2 所示,系统程序首先控制射频芯片,系统将扫频信号以编码形式通过QSPI1 传给DAC 模块,DAC 模块输出模拟信号控制芯片VCO 的调制波形,直到天线发射信号,同时射频芯片BGT24ATR12 的Q2 引脚输出调制频率信号,单片机的通用定时器模块(GTM) 对Q2 引脚进行捕获测量,以此来校正扫频信号。在BGT24ATR12 输出中频信号给单片机时,内部4 个ADC 模块采用ADC0 作为主机,ADC1、2、3 作为从同步,CCU60 T13 用于生成PWM 波,PWM 波下降沿开启触发ADC0 模块转换,4 个ADC 模块并行转换,同时开启CCU60 中断服务功能,用于监测DMA 搬运次数,当次数达128 次,关闭CCU60 T13,程序进入FFT 变换环节,通过DMA 传输到FFT 加速器中生成Range 维FFT,Range Buffer 将数据通过DMA 传到FFT 加速器中生成Dopper 维FFT,最后将Buffer 数据通过UDP协议上传到PC 显示,PC 端可以直观观察数据变换情况,用于修正参数和调整后期算法。
2 汽车毫米波雷达数据采集系统硬件电路设计
2.1 TC264DA 控制器选型及介绍
TC264DA 单片机适用于高级驾驶辅助系统(ADAS),是英飞凌公司对于汽车雷达和摄像头而开发的多核32 位CPU。本文选用TC264DA 单片机作为控制核心,其具有以下特点:双TriCore/DSP,具有主频200 MHz 和DSP 功能;高达2.5 MB 的闪存,具有ECC 保护,96 kB EEProm, 高达752 kB RAM, 具有ECC 保护;4 个12 位SAR ADC 转换器,5 个CAN FD nodes,4 个SPI,4 个LIN,48 个DMA 通道;100 Mbit 以太网;工作电压采用单电压电源5.0 V 或者3.3 V ;所有核心均支持浮动点和固定点[5-6]。
TC264DA 单片机200 MHz 主频满足高速处理需求,其内部自带4 个ADC 模块,中频放大电路输出直接接入对应ADC 模块通道中,无需外接ADC 模块。
2.2 BGT24ATR12 射频芯片选型及介绍
BGT24ATR12 是一款由英飞凌(Infineon)公司生产的微波集成电路(MMIC),主要用于24.00 GHz 的ISM 频段的信号生成和接收,从24.00 ~ 24.25 GHz,广泛应用于雷达系统中,特别是在汽车传感、手势识别、工业自动化等领域。
BGT24ATR12 收发器具备完全集成 VCO 的低相位噪声,具有 1.50 GHz 和 23.00 kHz 输出功率的开关预分频器,输出片上功率和温度传感器用于自检,单端 RF 输入终端,采用690 mW 的低功率损耗设计等特征,它可实现快速斜波模式的FMCW 技术,符合系统功能要求。
通过QSPI(串行外设接口)进行控制,方便集成与调试,BGT24ATR12 芯片通过ANA 引脚对芯片温度、发射功率传感器和本振功率传感器的电压峰值进行检测,输出电压信号用于对射频芯片指标的反馈。
2.3 CAN 总线通信电路设计
TC264DA 单片机MultiCAN+ 模块包含全 CAN 功能的CAN节点,节点可独立工作,并能通过网关功能交换数据和远程帧[7]。汽车上提供高速CAN 接口,符合ISO11898-2 标准,针对CAN总线的物理层进行了详细规范,本系统选用TJA1051 收发器提取汽车速度信息,是一款高速CAN 收发器,具有优越的电磁兼容性(EMC) 和静电放电(ESD) 性能,CAN 接口电路如图3 所示。
3 汽车毫米波雷达数据采集系统软件设计与实现
3.1 软件开发环境及工具介绍
TC264DA 单片机开发环境选用HighTec,HighTec 为汽车和工业领域安全要求高的应用提供优化的汽车级开源 C/C++ 编译器套件[8],HighTec 的IDE 集成了编译器、调试器、仿真器等多种工具,为TriCore 架构的开发提供了完整的开发环境。在IDE 中,开发人员可以方便地进行代码编写、编译、调试和仿真等操作。
3.2 ADC 模块采集与处理
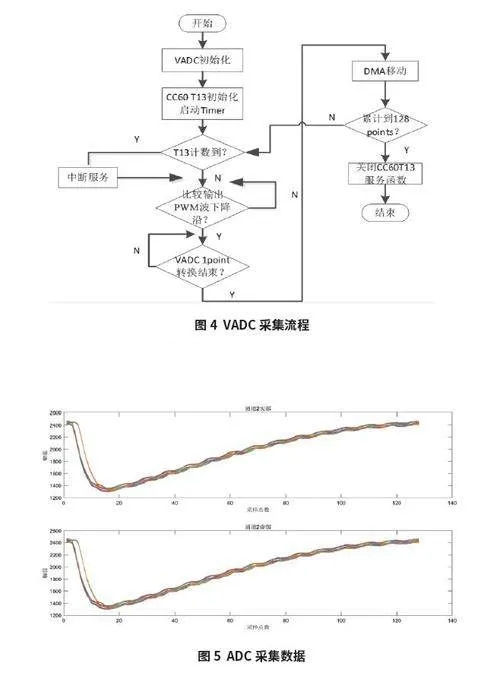
TC264DA 单片机内部ADC 模块对中频放大电路的四路信号进行并行等距采样传输,天线1、2 接收数据分实部(I 分量)和虚部(Q 分量),首先对VADC 和CCU60 T13 初始化,用于配置VADC 采样频率。CCU60 配置比较模式输出PWM 波,其下降沿触发VADC0 开始转换并起开其他3 个VADC 模块并行转换,VADC 转换的值放入对应的结果寄存器中,通过DMA 传输将结果寄存器中的数据搬运到VADC 缓存区。CCU60 T13 定时中断检测DMA 搬运次数,达128 次时,关闭CCU60 T13 服务请求,开启FFT 变换,VADC 缓存区的数据通过DMA 自动传入到FFT 加速器中,VADC 采集流程如图4 所示。
3.3 MultiCAN+ 模块数据读取
TC264DA 单片机内部有5 个独立的CAN 节点共用256 个报文对象,并提供16 个报文对象列表。首先对CAN 节点进行引脚配置和波特率配置,然后配置报文对象的收发模式,接收报文对象通过配置ID 位和AM 位来滤除汽车CAN 总线上多余的报文信息,只让关心的ID 位进入接收报文对象中,最后程序开启CAN接收和发送扫描任务,对接收到CAN ID 信息进行读取解析。
4 系统测试
系统测试借助matlab 软件,通过软件实时抓取ADC 原始数据,然后用绘图函数进行绘制,ADC 采集数据如图5 所示,图中ADC 数据对应天线2 的接收数据,天线2 接收数据分实部(I 分量)和虚部(Q 分量),通过幅值可以观察出ADC 数据存在直流分量。
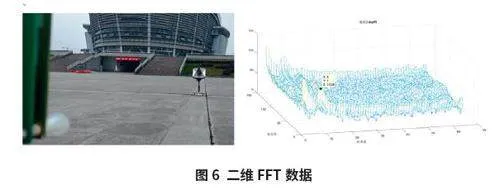
测试目标距离系统位置为6 m,TC264DA 单片机的FFT 加速器将通道2 采集的ADC 数据进行两次FFT 变换。通过测试图可知,目标在6 m 位置在二维FFT 三维视图中对应的X 轴的频点数为8,Y 轴频点数为1,代表速度为0,Z 轴为信号幅值,反映目标的大小,二维FFT 数据如图6 所示。
5 结束语
本文针对汽车盲点检测系统提出一种汽车毫米波雷达数据采集系统, 该系统主要通过TC264DA 单片机对射频芯片BGT24ATR12 进行发射控制,射频芯片输出中频信号经过放大电路处理传入单片机内部ADC 采集和FFT 变换,处理后的数据通过以太网上传PC 端解析显示。为了更好适应汽车盲点检测系统,单片机预留了CAN 接口,方便读取汽车数据。
通过实测数据可以发现,雷达数据能准确上传PC 端,通过matlab 对上传数据进行解析,雷达数据能准确反映目标信息,并且具备操作简单、成本低具有较高的实用价值。
【参考文献】
[1] 辛业华. 先进汽车辅助驾驶系统(ADAS) 发展现状及前景[J]. 内燃机与配件,2019,(19):192-194.
[2] 李守晓, 毕欣, 曹云侠. 毫米波雷达的汽车盲点检测系统研究与设计[J].机械设计与制造,2013,(09):25-27+31.
[3] 刘宝, 刘军民.FMCW 雷达快速高精度测距算法[J]. 电子测量与仪器学报,2001,(03):41-45.
[4] 张小卫. 基于英飞凌TriCore 汽车毫米波雷达设计与实现[D]. 西南科技大学,2020.
[5] 邓汝奎, 范毅, 李光平等. 基于英飞凌TC264DA 单片机的汽车发动机异常振动检测装置电路设计[J]. 汽车实用技术,2021,46(01):70-72.
[6] 李树德, 黄颂, 刘彩霞等. 基于TC264 单片机的智能无人小车设计[J].桂林航天工业学院学报,2021,26(04):435-440.
[7] 张小卫, 伍春, 刘雄等. 基于Infineon TriCore 的CAN 网关-Ethernet设计与实现[J]. 自动化与仪表,2019,34(09):79-83.
[8] 杨朝阳, 阮海庭, 殷春风等. 某插电式混合动力汽车网络架构及网关设计[J]. 汽车工程师,2019,(03):23-25+29.
作者简介:
张小卫,硕士,讲师,研究方向为雷达信号处理、嵌入式系统。
刘熠荣,本科,高级工程师,研究方向为车辆/ 机械结构设计、维修。
