
新能源汽车移动储能充电机器人防护结构设计
2024-10-12 00:00:00解梦秋
汽车与驾驶维修(维修版) 2024年9期
摘要:移动储能充电机器人使充电过程实现了“电找车”,方便用户充电。现有的移动储能充电机器人虽然有避障设计但外部不具有防撞组,在道路上、充电场所车辆来往较密,移动储能充电机器人受到撞击容易导致其内部储能电池机构损坏,造成极大损失。本文设计了一种移动机器人及其防护装置,就其结构及防护原理、应用进行了详细分析,解决了现有的移动储能充电机器人防护的问题,也可以实现对移动储能充电机器人的内部储能机构进行保护。
关键词:移动储能充电机器人;防护;结构;应用
中图分类号:TH122 文献标识码:A
0 引言
当前的充电设备,无论是有线传导充电还是无线充电、换电模式等都是“车找电”。当充电桩、换电站数量不多,不够密集时难免会产生充电困难,用户会产生焦虑,充电不自由依然是消费者的心结。尤其是一些老旧小区,无私家车位用户[1]。于是为新能源汽车进行充电的充电机器人应运而生。
近年来,国内电动汽车充电机器人研发正处于高速发展阶段。国内及国外的企业都纷纷加入了充电机器人的研发行列,分别推出了自己的移动充电机器人,比如:福特公司建立了机器人充电示范站;EV Safe Charge 公司推出了电动汽车充电机器人Ziggy ;2022 年,红旗研究院也推出了首款移动充电机器人等[2]。
移动充电机器人的出现,给扩充充电车位提供了新的解决方式。现有移动式电动汽车充电机器人分为带储能单元和不带储能单元两种类型,不带储能单元的机器人本身没有储能单元,只是移动至目标车辆,代替人工完成“摘下充电枪-将充电枪插入车辆插座-等待充电完成-拔出充电枪并将充电枪归位”的操作步骤,可以解决充电电缆和充电枪的重量使插拔操作对力量小的人士不友好这一问题,还可以将人从繁琐的充电操作和等待充电完成的过程中解放出来[3]。而带储能单元的机器人携带储能单元,移动至电动汽车充电位置,直接为电动汽车充电,用户充电不再是“车找电”,而是“电找车”。移动充电机器人是储充一体化的“移动充电宝”,不仅可以更灵活地把电充给新能源汽车,还可以降低基础设施建设的难度。移动充电站和移动充电机器人体积紧凑,几乎可以安置在任何需要的地方。
通过充电桩与充电机器人的配合,充电桩可采用相对少量的专属车位布局,解决需要快速和大量补能车主需求,其余车辆可停放在公共车位,充电机器人主动去寻找车辆,更好利用到充电资源与车位资源,解决了用户充电的焦虑。
1 移动充电机器人安全研究现状
为了更好地服务用户,移动机器人自身的安全也是非常重要的。安全防撞是移动机器人的重要功能之一。从现有的研究来看,移动充电机器人的研究主要集中在以下几个方面。
(1)通过机械设计,提升机器人的通过性及安全性。宛俊发表的机器人机械结构设计,运用模块化的思想,设计可变弹簧用作减振功能,提升驱动轮的稳定性和越障功能。在底盘上增加了激光和超声波等多种传感器,以达到导航和避障的功能[4]。
(2)对移动充电机器人充电、回充路径、效率和可靠性进行研究。刘永成等的研究介绍了目前室内移动机器人充电技术情况,重点研究了固定式充电技术、非接触式感应充电技术和有线取电技术,分析了应用于机器人的充电方法及充电流程;分析了滑触线取电、电缆卷盘取电和拖链线缆取电三种有线取电方式,为移动机器人智能取电设计提供了参考依据[5]。
张延年等针对移动机器人的路径规划问题,提出基于任务点全覆盖的能效路径规划算法(FCPP 算法)。该算法兼顾了移动机器人的路径长度和续航距离,依据任务点所在的位置,利用区域覆盖算法构建移动机器人的服务点,并确保每个任务点均被覆盖;再依据这些服务点和移动机器人的始点位置,优化移动机器人的路径,缩短完成任务时间。仿真结果表明,执行1 000 个任务点时,FCPP 算法只需5.33 s,有效地提升了执行任务的效率[6]。
刘尚俊等针对移动充电机器人复杂路径环境应对进行了研究,改进灰狼算法的移动充电机器人路径规划。针对停车场内复杂与随机的障碍物环境对其路径规划与避障功能的更高要求,通过对传统灰狼算法的改进,对停车场内的电动汽车移动充电机器人的路径规划问题进行了仿真与分析[7]。
从现有的研究来看,对于移动机器人充电过程的安全方面研究还较少,移动机器人的安全防护按探测形式可分为非接触式和接触式两种[8]。现有的移动储能充电机器人通常采用环境扫描自动驾驶的非接触方式控制移动,在研究方面主要集中在主动非接触式安全防护的研究。虽然有避障设计,然而在道路上、充电场所车辆来往较密,并且移动储能充电机器人造价高昂其内部储能电池块造价极其昂贵,所以接触式防护装置也不可或缺,它不会被环境等因素干扰,当非接触式传感器失灵,他会保证移动机器人不会产生更严重的破坏,这是保护的最后一道防线。因此,设计具有外部碰撞防护功能的移动机器人,能更有效保护充电机器人及其内部储能机构的安全。
2 移动充电机器人结构设计
针对移动充电机器人的防护问题,本文设计了一款具有防护装置的移动充电机器人。本移动充电机器人的结构设计可以作为现有的移动储能充电机器人防护的有效补充,实现对移动储能充电机器人的内部储能机构进行保护。
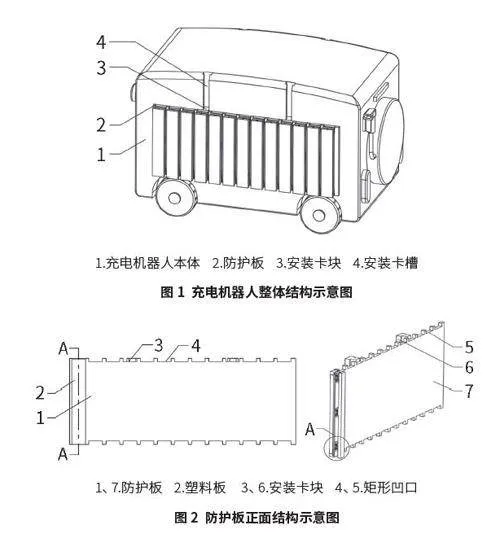
该移动机器人即移动储能机构,包括充电机器人本体。在充电机器人本体的外表面开设安装卡槽,安装卡槽的内部插接有安装卡块;安装卡块的表面固定连接防护板的内表面,防护板的外表面设置有塑料板。安装卡槽呈“凸”字形设置,安装卡槽的表面活动连接安装卡块的表面,且安装卡槽不完全贯穿于充电机器人本体(图1)。
防护板的结构如图2 所示,表面开设矩形凹口,矩形凹口的表面卡接夹持框的内部,夹持框的表面开设T 型卡槽,T 型卡槽的表面卡接有T 型卡块,T 型卡块的表面固定连接安装板的内表面,安装板的外表面设置有塑料板。
安装板的表面固定连接弹簧安装盒的内表面,弹簧安装盒的表面活动连接收缩槽的内部,收缩槽设置在压缩块的内部,弹簧安装盒和压缩块之间设置有强力弹簧,压缩块的表面开设有插接口,插接口的表面插接有限位插接块,限位插接块的表面固定连接塑料板的内表面。
夹持框的截面呈“匚”字形设置,夹持框的设置数量为两个,且两个夹持框沿防护板的中心点对称设置。防护板的设置数量也为两个,且两个防护板沿充电机器人本体的中心点对称设置。
3 移动充电机器人防护原理
通过在充电机器人本体的外表面开设安装卡槽,将安装卡块的表面插接至安装卡槽的内部,从而使得防护板稳固安装在充电机器人本体的表面。当向上提拉防护板时可以将其从充电机器人本体的表面拆卸下来,通过在防护板的表面设置塑料板。因此,当充电机器人本体的表面受到碰撞时从而通过防护板和塑料板对其起到防护作用,因此对充电机器人本体内部储能机构的电池块起到保护作用。不仅解决了现有的移动储能充电机器人防护的问题,也可以实现对移动储能充电机器人的内部储能机构进行保护。
当充电机器人本体的表面受到碰撞时从而通过防护板和塑料板对其起到防护作用,因此对充电机器人本体内部储能机构的电池块起到保护作用。
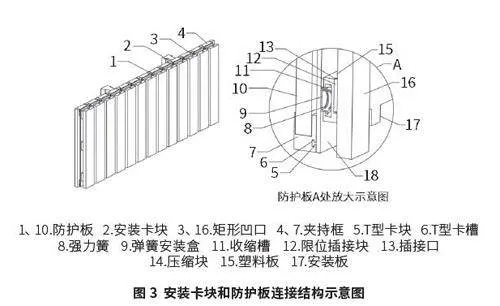
为了实现可以将安装板从充电机器人本体的表面拆卸下来,对塑料板的设计进行了修改(图3)。
防护板的表面开设矩形凹口,矩形凹口的表面卡接夹持框的内部,夹持框的表面开设T 型卡槽,T 型卡槽的表面卡接有T 型卡块,T 型卡块的表面固定连接安装板的内表面,安装板的外表面设置有塑料板。当充电机器人本体的表面遭受碰撞,导致塑料板损坏时,可以将安装板8 从充电机器人本体的表面拆卸下来,对塑料板进行更换。
为了实现减小充电机器人本体外部受到碰撞的冲击力,安装板的表面固定连接弹簧安装盒的内表面;弹簧安装盒的表面活动连接收缩槽的内部;收缩槽设置在压缩块的内部;弹簧安装盒和压缩块之间设置有强力弹簧;压缩块的表面还设有插接口;插接口的表面插接有限位插接块;限位插接块的表面固定连接塑料板的内表面。
通过将塑料板的内表面固定连接限位插接块的表面,然后将限位插接块插接至收缩槽的表面,从而使得塑料板可以稳固安装在安装板的表面;将弹簧安装盒的表面活动连接收缩槽的内部,然后在弹簧安装盒和压缩块之间设置强力弹簧;当塑料板的表面受到撞击后,通过强力弹簧的弹力起到缓冲作用,从而减小充电机器人本体外部受到碰撞的冲击力。
4 移动充电机器人防护装置应用
实际使用时,通过在充电机器人本体的外表面开设安装卡槽,将安装卡块的表面插接至安装卡槽的内部,从而使得防护板稳固安装在充电机器人本体的表面,当向上提拉防护板时,可以将其从充电机器人本体的表面拆卸下来。通过在防护板的表面设置图中的塑料板,当充电机器人本体的表面受到碰撞时,通过防护板和塑料板对其起到防护作用,同时也保护了充电机器人本体内部储能机构的电池。
通过将夹持框的内表面卡接矩形凹口的表面,然后将T 型卡块的表面固定连接安装板的内壁,当T 型卡块插接至T 型卡槽的表面时,使夹持框稳固夹持安装在防护板的表面。通过在安装板的表面设置塑料板,当充电机器人本体的表面遭受碰撞,导致塑料板损坏时,可以将安装板从充电机器人本体的表面拆卸下来对塑料板进行更换。通过将塑料板的内表面固定连接限位插接块的表面,然后将限位插接块插接至收缩槽的表面,从而使得塑料板可以稳固安装在安装板的表面,将弹簧安装盒的表面连接到收缩槽的内部,然后在弹簧安装盒和压缩块之间设置强力弹簧,当塑料板的表面受到撞击后从而通过强力弹簧的弹力起到缓冲作用,从而减小充电机器人本体外部受到碰撞的冲击力。
5 结束语
总的来说,通过在储能电机器人主体上特殊的结构设计,加装防护板、塑料板及强力弹簧等,使充电机器人在受到碰撞时能够对机器人主体及内部电池块起到保护作用,当防护塑料板受损时可以通过可拆卸安装板随时进行替换。同时,通过强力弹簧布置可以减小碰撞时的冲击力,对充电机器人起到很好的保护作用。
电动汽车充电机器人作为充电服务领域当前研究应用的热点之一,推动了电动汽车充电方式向自动化、无人化、智能化方向发展,为充电难题的破解提供了新的解决方案。作为非接触式安全防护的外部防撞装置的补充,设计合理的外部防撞装置对充电机器人的防护和安全有着非常重要的意义。
备注:本文系广东工贸职业技术学院校级重点委托专项课题《智能网联新能源汽车研究中心》(项目编号:2022-PTW-01);广东工贸职业技术学院2023 年校级科研项目《面向无人驾驶的新能源汽车充电技术研究》(项目编号:2023-ZKJ-10)。
【参考文献】
[1] 孙永剑. 充电机器人或站上“风口”[N], 中华工商时报,2023.5(006).
[2] 佚名. 红旗研发出可移动智能充电机器人[J]. 传感器世界,2022.28(10).
[3] 杨磊, 浑连明, 祖国强, 等. 电动汽车充电机器人发展现状和标准需求[J].中国电力,2024.4.
[4] 宛俊. 机器人机械结构设计[J]. 科学技术创新2021.2.
[5] 刘永成, 马孝林, 孙昊, 等. 移动机器人智能取电技术研究[J]. 信息技术与信息化,2021.9.
[6] 张延年, 吴昊, 张云. 兼顾路径长度和充电站位置的移动机器人路径规划[J]. 组合机床与自动化加工技术,2023.10.
[7] 刘尚俊男, 刘书海, 肖华平. 改进灰狼算法的移动充电机器人路径规划[J].现代制造工程,2024.4.
[8] 侯霄. 移动机器人安全防撞技术探讨[J]. 电子信息,2018.12.
作者简介:
解梦秋,硕士,讲师,研究方向为新能源汽车、智能网联汽车。
