新工科背景下机器人工程专业人才实践创新能力培养模式探索
2024-10-10 00:00:00李志军杜丽张文祥
黑龙江教育·理论与实践 2024年10期



摘 要:机器人工程是典型的新工科专业,具有鲜明的多学科交叉特点,更加强调学生的工程实践创新能力培养。基于这一特点,文章首先构建了梧州学院机器人工程专业实践创新一体化培养体系,其次以水下机器人实训项目为例,详细阐述实训平台选择、实训内容由“学练”到“创新”的递进式实践创新能力培养模式,并系统设计了学生在对应阶段应完成的项目内容,最后明确了通过该模式应达成的培养目标。实践表明,该模式提升了学生的水下机器人开发设计能力和工程实践创新能力,为机器人工程专业新工科建设发挥了积极作用。
关键词:新工科;机器人工程专业;实训项目;实践创新能力
中图分类号:G642.0 文献标识码:A 文章编号:1002-4107(2024)10-0037-04
一、引言
2023年1月,工业和信息化部等十七部门发布的《“机器人+”应用行动实施方案》提出,结合区域发展特色,开展“机器人+”应用创新实践,促进经济社会高质量发展[1]。该方案推动了机器人行业的加速发展,但追根溯源,加强人才培养才是方案实施的重要保障。机器人工程专业的最大特点是多学科交叉、工程实践性强[2-4],因此,该专业要和其他工科类专业有所不同,应以培养学生解决复杂工程问题能力为主线,构建实践创新一体化的培养体系[5-6]。
梧州学院是广西地区最先获批机器人工程专业的高校。机器人工程专业是该校电子信息新工科专业群中的新建专业,自2019年开始招生。梧州是三江(西江、桂江和浔江)汇合之地,水系资源丰富。作为地方本科院校,梧州学院办学定位立足梧州,服务“一区一带”(粤桂合作特别试验区和珠江——西江经济带),因此,机器人工程专业开设水下机器人实训对于服务区域经济发展具有重要意义。为提高学生的工程实践创新能力,文章构建了“四层次”实践创新一体化培养体系,并以综合自主实践层的水下机器人实训为例,详细阐述水下机器人实训项目的“学练”与“创新”2个阶段设计。实践表明,实训项目提高了学生的实践创新能力,多名学生在学科竞赛中取得了优异的成绩。
二、实践创新一体化培养体系
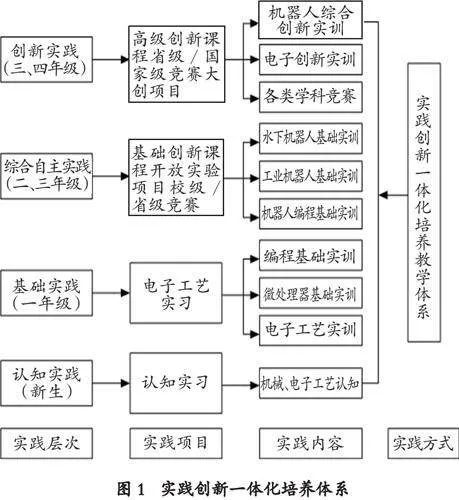
梧州学院机器人工程专业将实践与创新有机结合,构建了实践创新一体化培养体系,贯穿大学四年,如图1所示。
整个体系分为四层,第一层为认知实践能力培养,面向大一新生,进行机械、电子工艺方面的认知,学习了解机器人基础知识;第二层为基础实践能力培养,完成基础课程方面的硬件设计和软件设计,强化学生的动手能力,为后面的实训和竞赛打a/xkecqAjlfWpFo1v6sS4w==好基础;第三层为综合自主实践能力培养,学习机器人各个方面的知识和技能,同时参加校级/省级的学科竞赛;第四层为创新实践能力培养,主要通过各类学科竞赛和“双创”项目提高学生的理论水平和实践技能,学生的成果主要在这一层产生。水下机器人基础实训属于综合自主实践层,是在完成相关基础实践后进入的高级实践层,这一层的目的是引导学生建立系统和工程的概念。
三、水下机器人实训平台
水下机器人被广泛应用于军用、民用等各个领域,其作为水下开发工具在水下观测和水下作业方面体现出了巨大优势。梧州学院水下机器人实训平台选用博雅工道(北京)机器人科技有限公司的自主仿生机器人作为教学工具,这是一款全面开源的水下仿生机器人,采用单关节仿生尾鳍作为推进器,模仿鱼类外形和运动规律进行水下环境数据收集,实物图如图2所示。机器人工程专业配备有6套这样的水下机器人及1个专用水池。由于水下机器人基础实训项目较为复杂,因此,按照机器人学科竞赛要求,学生每3人为一组,小组成员分工协作,一次可18人同时进行实训,利于有序地开展教学和培养学生的合作能力。
水下机器人系统组成:主机舱、控制舱、电池舱、尾鳍、天线、水声遥控、PC 端平台。
参数:主体尺寸长27.2 cm、宽11 cm、高18.1 cm;整体质量1.2 kg;水下声波通讯5~10 m;图像采集30万像素;续航时间90~150 min。
水下机器人实训平台主要技术特点如下。①自主识别。搭载高清摄像头,基于Linux操作系统对采集图像进行处理,可在水下识别到目标物体,并实现机器人对目标物体的智能拍摄和跟随。②代码开源。提供机器人二次开发所常用的SDK库函数,并配有相应函数解析过程,便于对机器人进行二次开发,且易调试、上手快。③外设航插。预留防水航插,通过该航插接口,机器人可直接搭载外设,实时显示外接设备的工作状态信息。④调试平台。提供配套调试软件,可对机器人进行参数调节、程序编写和烧录,可查看外接设备的工作状态信息,可实时拍摄图像。⑤双端操控。可设置手动遥控模式,通过水声遥控器无线操控机器人;也可设置自主模式,规划机器人游动方式,使机器人实现自主游动。⑥水声通信。不同于常规的有缆操控方式,采用水声通信方式操控机器人可增加机器人的便捷性和灵敏性。
这套水下机器人实训平台作为教学载体,可在运动控制、机械设计、电子电路、水声通信等方面对学生进行理论与实践教学;作为科研载体,可依据科研需求搭载相应传感器进行科研创新,进行自主水下图像识别、路径规划、自主避障等智能程序开发,还可拓展研究方向,包括流体力学、仿生学、多机器人编队等多个研究领域。同时,该实训平台还可参与创新竞技比赛及各类水下机器人竞赛,提高学生的竞技水平。
四、实训项目设计
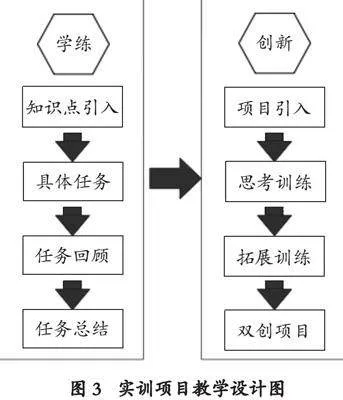
水下机器人实训项目的教学设计分为2个阶段,即第1阶段“学练”与第2阶段“创新”,2个阶段呈递进式模式,如图3所示。
在“学练”阶段,首先进行的是知识点引入,然后分配具体任务,在完成实训任务后要进行任务回顾,由小组探讨实训过程中出现的问题,最后进行任务总结。这一阶段是基础,为“创新”阶段做准备。在“创新”阶段,首先是引入具体项目,把分散的知识点进行整合与应用,项目的来源主要是往年的竞赛题目、教师的科研课题,主要针对特定场景的应用项目。在项目确定后,小组成员要认真思考,至少提出3种解决方案,再择优实现项目。在项目的后期阶段,要针对项目提出拓展任务并实现。通过这一阶段的训练,学生可基于自己新的创意和想法申报创新创业项目。
(一)“学练”阶段实训设计
“学练”阶段的项目主要包含6方面,且有对应的具体内容,知识点相对独立,要求学生熟练掌握相关的“学练”项目,为“创新”阶段打好基础(表1)。
项目1和2涉及水下机器人基本原理及基本编程方法;项目3涉及图像识别的应用;项目4涉及水下机器人传感器的开发应用;项目5涉及多个数字、模拟传感器的协同应用;项目6涉及水下机器人的二次开发。通过“学练”阶段的训练,师生可以共同学习和探讨水下机器人的运动路线设计、目标识别、避障算法等相关知识点,并进行“学练”阶段的总结。
(二)“创新”阶段实训设计
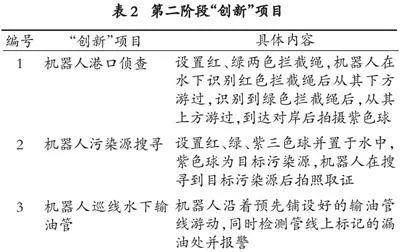
“创新”阶段要完成3个模拟场景的水下机器人应用项目,是“学练”阶段知识点的综合运用(表2)。
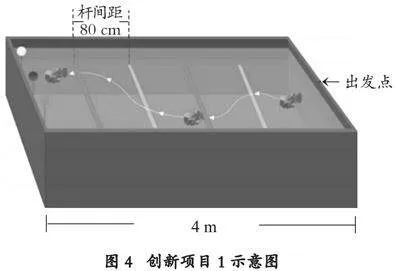
项目1是2020年第二届广西大学生人工智能设计大赛第二赛道竞赛题目,具体要求:机器人在水池中穿越拦截绳,稳定停止在终点并成功拍摄完整的紫色球。机器人的出发位置位于场地边缘出发区标志点,在穿越拦截绳的过程中,机器人不得触碰到拦截绳。拦截绳平行放置在水中,红、绿交错放置,拦截绳之间的间距均为 80 cm,且各个拦截绳所处的水深不同,红色拦截绳处水深 20 cm、绿色拦截绳处水深40 cm,具体示意图如图4所示。
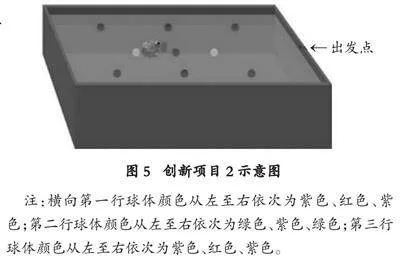
项目2具体要求:机器人在水池中按照学生设计的搜索策略,通过前置摄像头搜寻污染源。在搜寻到污染源后需近距离拍照取证,要求照片上可以清晰看到污染源编号。其中,紫色球为污染源目标模型,红色球和绿色球为干扰模型,所有球均在水平面 20 cm 以下。机器人的出发位置位于出发岸的标志点,目标球体在水池中的位置固定,不受机器人的游动影响。每个目标模型上标有数字编号,具体示意图如图5所示。
项目3具体要求:用直径75 mm的白色PVC管铺设模拟输油管线,PVC管铺在水池底部,管线布局由每个实训小组自己设定。用直径1~3 cm圆形实心黑色标记表示漏油处,共设置多个漏油处,随机分布在输油管正上方。机器人沿着铺设好的输油管线游动,游动的同时检测管线上标记的漏油处,通过声音、光、回传PC机数据等方式报警漏油处。更进一步还可以设置漏油处在水面,用红色气球表示石油已渗漏至水面的点位,水下和水面都有漏油处,既增加了项目的复杂度,也更接近于实际场景。
项目引入后,学生应主动积极思考,根据项目任务进行方案设计。例如,项目2要求学生自己设计搜索策略,完成相应的任务;项目3的难度取决于模拟输油管线铺设的复杂度。3个项目都是通过对图像处理知识的学习,掌握图像处理的基本算法,从而实现水下物体识别和机器人运动控制。
“创新”阶段的训练要求师生在项目完成后要共同探讨机器人仿生项目策略、机器人搜寻项目策略等问题,总结项目实施过程中出现的问题及解决方法。同时,鼓励优秀的学生可针对水下机器人项目提出和实现自己的创新想法。
(三)创新与学科竞赛
水下机器人大赛具有广泛的工程背景,可以促进水下机器人相关技术的发展,在海底勘探、军事侦察、海洋开发等诸多领域具有重要的意义。为实现机器人创新开发的目的,水下机器人实训平台预留了防水航插接口,可搭载温度、含氧量、PH值、硝氮等水质传感器。学生可通过接口进行二次开发,在机器人机体上搭载新的传感器,通过复杂的程序设计完成新的创意作品,探索水下世界,实现创意的现实转化,以激发创新思考。
梧州学院机器人实训室实行开放模式,为学生提供良好的学习环境和场所,鼓励学生参加水下机器人创新创意类比赛,提高动手能力(图6)。在经过“学练”和“创新”2个阶段训练后,学生组建兴趣小组,侧重于水下机器人的创新创意开发,可在原有API函数库的基础上编制新的程序,设计和实施新的比赛策略。在了解国内外机器人竞赛的规则和要求后,学生可积极参加国内外的水下机器人大赛,以此为载体,提升学校的综合水平及影响力,获得与国内外一流教师、参赛队员的交流机会。参赛学生还可以进行项目综合开发,在机械开发能力、团队合作能力等多方面得到锻炼。与其他类型的机器人竞赛相比,水下机器人竞赛较好地融合了技术挑战和视觉观赏,吸引了众多学生的兴趣和机器人爱好者参与其中,在竞赛中也出现了很多好的创意。
五、实训项目达成目标
梧州学院以水下机器人为载体,构建水下机器人基础实训平台,通过运动控制系统控制机器人的游动速度、浮潜、拍摄、照明及姿态稳定,通过图像识别系统进行目标识别和跟随,通过水声遥控系统进行机器人操控,着重培养学生对水下机器人系统的分析与设计能力,以及学生对机器人系统科学知识的应用能力,培养了学生的创新意识,同时支撑了机器人专业建设成果中相应指标点的达成。
梧州学院通过机器人工程专业实践创新能力培养模式,具体达成了如下目标。①了解应用。学生了解了水下机器人的概念和工作方式,熟悉前沿领域的发展和应用状况。②掌握原理。学生掌握了水下机器人的各个组成部件原理及应用、各种传感器和驱动器的原理,通过编程实现对水下机器人的控制。③提高能力。通过完成“学练”项目和“创新”应用项目,学生提高了规划能力、动手能力、协作能力和解决问题的能力。④转化创意。以水下机器人为平台载体,通过水下机器人的航插搭载不同类型的传感器,完成各种水下的实验和创意,学生提高了创新能力,并可将自己的创新创意转化为实际作品。⑤拓展学习。学生学习图像识别和人工智能的科技前沿,以水下机器人为载体,还学习了自主视觉、人工智能、神经网络方面的前沿科技知识。
六、结束语
通过水下机器人实训,学生提高了海洋科技与人工智能方面的创新意识和能力。自2020年开始,梧州学院机器人工程专业已连续参加了3届广西大学生人工智能设计大赛(水下机器人赛道),共获得一等奖3项、二等奖8项、三等奖多项,2023年第一届毕业生就业率达到91.67%。实践表明,实践创新能力培养模式提升了学生的水下机器人开发设计能力和工程实践创新能力,为机器人工程专业新工科建设发挥了积极作用。
参考文献:
[1] “机器人+”应用行动实施方案[J].中国信息化,2023(2):11.
[2] 郝建豹,林子其,谭华旭.基于“平台引领、双景融合、四层进阶、三维对接”的机器人技术实践教学改革[J].实验技术与管理,2021,38(3):246.
[3] 栗琳,郑莉芳,马飞,等.产教融合的机器人工程专业实践教学体系构建研究[J].高等工程教育研究,2021(4):88.
[4] 李瑞峰,荣伟彬,邓鑫.新工科背景下机器人工程专业研究与探索[J].中国大学教学,2020(2/3):32.
[5] 孙中波,刘克平,于微波.基于机器人创新平台的学生自主学习与创新能力探索与实践[J].黑龙江教育(理论与实践),2023,77(5):13.
[6] 张辉,李积武,黄风立,等.基于OBE的机器人综合实训教学模式改革与成效[J].实验室研究与探索,2021,40(3):231.
作者简介:李志军,男,副教授,高级工程师,研究方向为物联网技术、人工智能与机器人;杜丽,女,高级工程师,研究方向为无线充电技术、实验教学与管理;张文祥,男,教授,研究方向为无线传感网络及创新型人才培养。
基金项目:广西高等教育本科教学改革工程项目“新工科背景下地方本科高校机器人工程专业建设研究与实践”(2023JGZ163)、“高质量发展背景下地方应用型本科院校电子信息类专业科研教学一体化建设与改革研究”(2023JGA320);广西教育科学“十四五”规划项目“工程教育专业认证高质量课程体系教学目标协同建构与实现路径研究”(2023A069);梧州学院教育教学改革工程项目“‘电路分析实验’课程思政建设的探索与实践”(Wyjg2023A037)、“新工科背景下应用型高校机器人工程专业建设探索与实践”(Wyjg2022B022)