基于安全距离和时空网格的交叉路口车辆防碰撞安全预警
2024-09-16 00:00:00马昌杨颖
现代电子技术 2024年10期
关键词:交叉路口









摘" 要: 为保证交叉路口车辆行驶不出现碰撞问题,提出一种基于安全距离和时空网格的交叉路口车辆防碰撞安全预警方法。将交叉路口划分为多个网格,利用路侧单元并根据车辆所占的网格数,初步判断是否存在两车共用同一网格的情况。若在某一时刻两车占用相同的网格则会发生碰撞,故依据交叉路口车辆防碰撞安全距离,计算交叉路口前车未启动、前车匀速驾驶、前车均匀减速驾驶三种工况的临界行驶安全距离,结合此距离,将预警级别分为黄、绿、红三级,进行分级安全预警。实验结果显示:采用所提方法后,交叉路口车辆均安全通行,能够降低交叉路口车辆防碰撞安全预警的误警率、预警虚报率,提高交叉路口车辆防碰撞安全预警精度。
关键词: 车辆防碰撞; 交叉路口; 安全预警; 时空网格; 安全距离; 车联网平台; 多级预警提醒
中图分类号: TN911.23⁃34; TP399" " " " " " " " " "文献标识码: A" " " " " " " " " 文章编号: 1004⁃373X(2024)10⁃0177⁃05
Vehicle collision prevention safety warning at intersections based on safety
distance and spatiotemporal grid
Abstract: In order to ensure that vehicles at intersections do not encounter collision issues, a collision prevention and safety warning at intersections based on safety distance and spatiotemporal grid is proposed. The intersection is divided into multiple grids, and roadside units are used to preliminarily determine whether there is a situation where two vehicles share the same grid based on the number of grids occupied by the vehicles. If two vehicles occupy the same grid at a certain moment, a collision will occur. Based on the collision prevention safety distance of vehicles at the intersection, the critical driving safety distance for three working conditions: the front vehicle is not started, the front vehicle is driving at a constant speed, and the front vehicle is driving at a uniform deceleration are calculated. In combination with this distance, the warning level is divided into three levels: yellow, green, and red, with graded safety warnings. The experimental results show that after adopting the proposed method, vehicles at intersections can safely pass through, which can reduce the 1 alarm rate and 1 alarm rate of collision prevention safety warnings for vehicles at intersections, and improve the accuracy of collision prevention safety warnings for vehicles at intersections.
Keywords: vehicle collision prevention; intersections; safety warning; spatiotemporal grid; safe distance; vehicle networking platform; multi level warning reminder
0" 引" 言
城市交叉路口是交通事故发生频率最高的地方,这些交叉路口的交通流量很大,会影响车辆的驾驶安全和效率[1⁃3]。车联网是目前处理交叉路口车辆安全驾驶问题的核心技术[4],已有大量关于车路协同碰撞预警问题的研究成果。如文献[5]在解决车辆碰撞预警问题时,使用图像处理技术检测车道线,根据车速设定安全范围。采用卷积神经网络检测视野中的车辆,当车辆进入不安全区域时发出碰撞预警。但该方法的图像处理效果很大程度上依赖于环境条件,如光照、天气、摄像机的角度等,在恶劣的天气条件(如雨、雪、雾)或低光照条件下,预警性能可能会大幅下降。文献[6]通过V2I通信,利用网联信息获取交叉口周围车辆的定位信息,实现车辆碰撞感知与预警。虽然V2I通信技术已经取得了一定的进展,但其在车辆碰撞预警中的应用仍处于发展阶段,技术成熟度有待进一步提高。随着车联网技术的普及,V2I通信可能会面临信号干扰和信道拥堵的问题,这会影响通信的可靠性和实时性,导致车辆碰撞预警的实时性受到影响。
为优化交叉路口车辆防碰撞安全预警的可靠性与实时性,本文提出一种基于安全距离和时空网格的交叉路口车辆防碰撞安全预警方法,计算车辆之间的安全距离,从而有效地预防车辆碰撞事故;其次,将交叉路口划分为若干个时空网格,每个网格代表一定的时间和空间范围,通过监测车辆在时空网格中的位置和运动轨迹,可以初步判断车辆运动趋势,从而判断是否存在碰撞风险,保障道路交通的安全和畅通。
1" 交叉路口车辆防碰撞安全预警方法
交叉路口是车辆进出的关键点,研究交叉路口车辆防碰撞安全预警方法可以及时发现潜在的冲突和危险情况,向驾驶员提供预警提示,帮助车辆及时采取避让或制动等措施,保障行车安全。
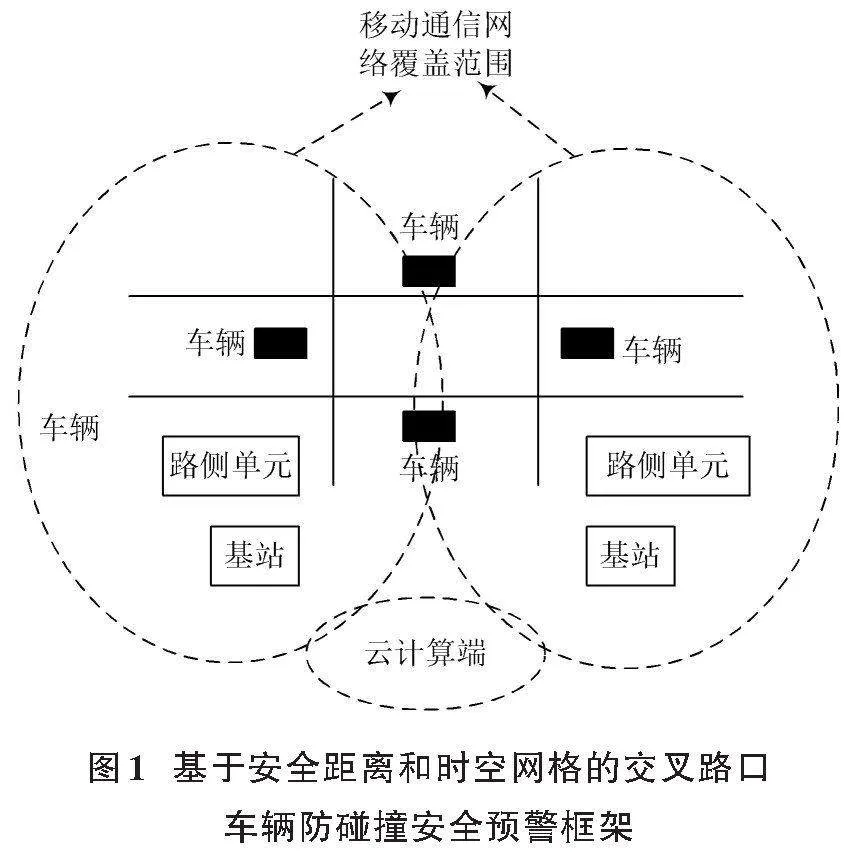
基于安全距离和时空网格的交叉路口车辆防碰撞安全预警框架如图1所示。
车辆防碰撞安全预警框架
图1的预警框架中,车联网平台主要分为路侧单元与车载单元[7⁃8],单元之间主要通过移动通信网络传输数据。若车辆运行至移动通信网络覆盖范围,车辆的车载单元便会与自身空间距离最小的路侧单元连接,进行信息通信。且车载单元和路侧单元都具备单独的电子标签,车辆能够与其进行预警信息定向通信。车辆实时感知信息主要通过移动通信网络发送至云端,云端计算分析车辆的时空网格信息、安全距离后,下发预警信息至车辆,进行碰撞预警提示[9]。
1.1" 基于时空网格的车辆冲突分析方法
车辆冲突的时空特性明显,即车辆冲突发生的时间和空间具有显著的影响因素。基于时空网格对车辆冲突进行分析,可以更好地理解和评估车辆冲突发生的规律和趋势。
将道路网络划分为若干个网格单元,每个网格单元代表一定的时间和空间范围,通过统计和分析每个网格单元内的车辆冲突数据,可以更好地识别车辆冲突的热点区域和多发路段。交叉路口时空网格的构建方法如下。
1) 结合车载单元实时采集的车辆时空数据,假如时空网格边长是[Z],则车辆时空数据[R]转换为正方形格子组建的时空数据网格[F]。
2) 按照设置的时序间隔数目[H],将时空数据网格[F]中各个格子执行均分处理,获取[H]个时空网格,将车辆驾驶至交叉路口的时间点信息匹配至相应的时空网格中。
时空网格示意图如图2所示。
利用此方法得到交叉路口时空网格转换示意图,如图3所示。
图3中,车辆行驶至交叉路口区域后,结合车辆在交叉路口时空网格中的占据比例,便可判断车辆是否存在潜在碰撞的可能性,若多辆车辆同时在时空网格中占据1个或者1组网格,便可初步判断此车辆存在碰撞概率。除此之外,车辆和车联网的路侧单元之间存在实时通信关系,车载单元实时采集车辆所在位置、所在网格、车速等信息传输至路侧单元,路侧单元将感知信息发送至云端,计算车辆的安全距离是否存在异常,若存在异常便将警报信息发送至车载单元,提醒驾驶人[10]。
1.2" 交叉路口车辆防碰撞安全距离建模
交叉路口车辆防碰撞安全距离的设置应考虑具体的道路条件,如路面状况、视线情况、交通标志和信号灯等;同时,还应考虑特殊环境因素,如雨雪天气、山区道路等,根据实际情况适当调整安全距离。
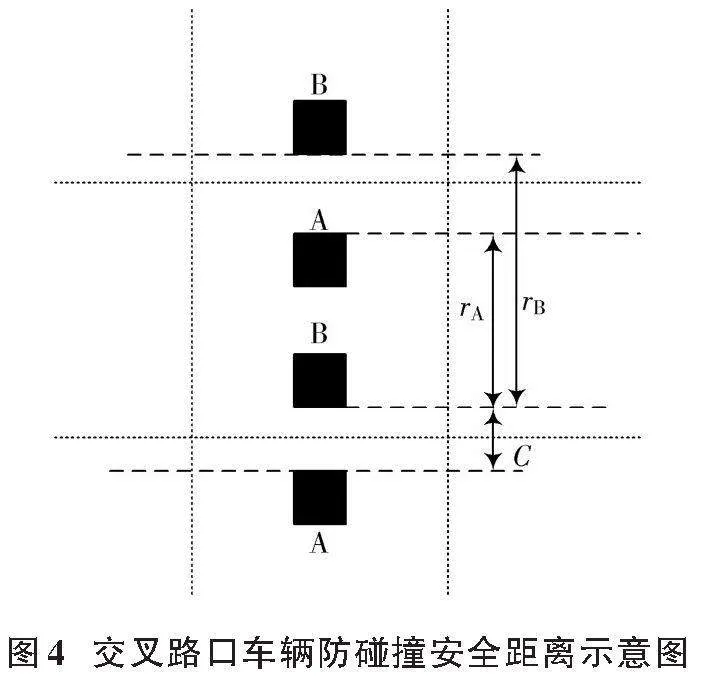
在时空网格中,交叉路口车辆跟驰驾驶时,自车和前车之间的驾驶距离不可以小于两车之间的临界行车安全距离。图4是交叉路口车辆防碰撞安全距离示意图,其中,自车编码为A,前车编码为B。
图4中:设置临界行车安全距离与自车制动距离分别是[C]、[rA];前车制动距离与前车停止驾驶时需保持的最小距离分别是[rB]、[c0],则两车的临界行车安全距离计算公式为:
[C=rA+c0-rB]" " " " " "(1)
临界行车安全距离不但受自车制动距离影响,还受到前车的制动距离所影响。前车的驾驶状态对两车的临界行车安全距离存在直接干扰,则结合前车驾驶情况,从下述三种工况分析临界行车安全距离。
1) 前车未启动
若前车未启动,其制动距离[rB=0]。自车的制动距离为:
式中:[bB]表示前车制动速度最大值;[h1]、[h2]、[h3]分别表示驾驶员反应耗时、车辆制动器制动协调耗时、减速度增长耗时;[uA]表示自车车速。
车辆制动过程如图5所示。图中,[h4]与[bmax]分别代表自车制动持续时间与减速度最大值。
前车未启动的工况中,临界行车安全距离为:
式中[uB]代表前车车速。
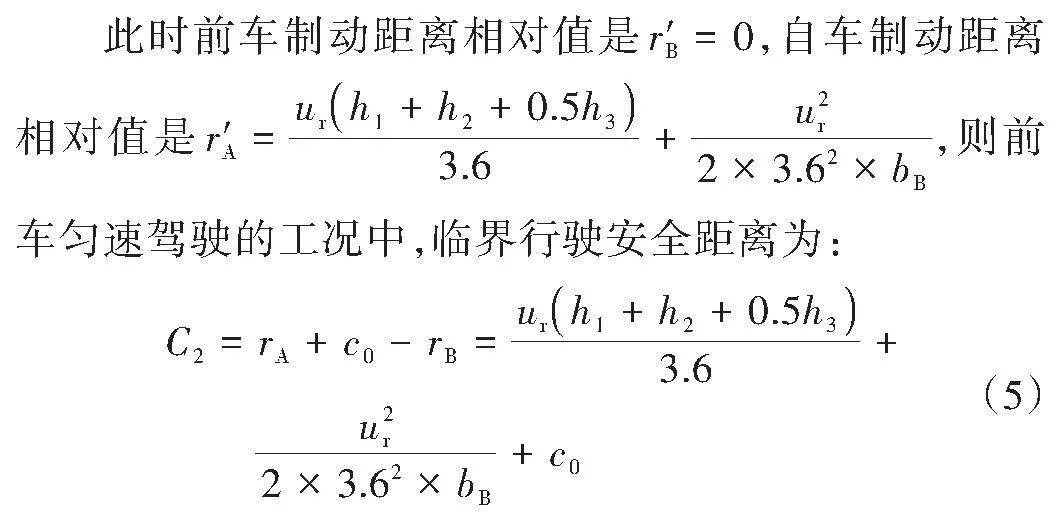
2) 前车匀速驾驶
前车匀速驾驶,假如[uAlt;uB],则此交叉路口中车辆不会出现碰撞;假如[uAgt;uB],则车辆减速时两车减速值接近,存在碰撞的可能。假如辆车初始时刻的相对速度为:
[ur=uA-uB]" " " " " " " " "(4)
3) 前车均匀减速驾驶
1.3" 交叉路口车辆防碰撞安全预警级别划分
通常根据潜在碰撞风险的严重程度,将车辆防碰撞安全预警预警分为不同的级别,不同级别的预警可以根据情况确定不同的预警方式、预警时间和预警强度。
设置交叉路口某时段[h]自车速度是[uAh],前车车速是[uBh],前车位置是[Xh,Yh]。将交叉路口自车和前车之间距离[Oh]和临界行车安全距离[C]与制动临界距离[C]进行对比。
1) 若交叉路口[h]时段自车和前车之间距离不小于临界行车安全距离[C],表示前车不在自车预警范围,预警装置不动作。
2) 若交叉路口[h]时段自车和前车之间距离未大于临界行车安全距离[C],但比制动临界距离[C]大,则前车处于自车的碰撞预警范围内,报警设备启动响应。
2" 实验分析
2.1" 实验设计
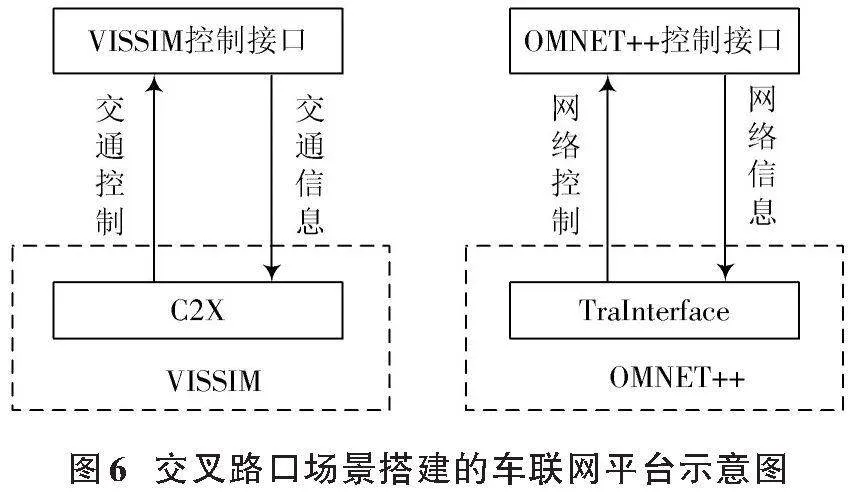
采用当下交通领域使用较多的微观交通模拟器VISSIM与网络模拟器OMNET++搭建车联网平台。微观交通模拟器能够模拟交叉路口微观场景,网络模拟器用以搭建移动通信网络。车联网平台示意图如图6所示。
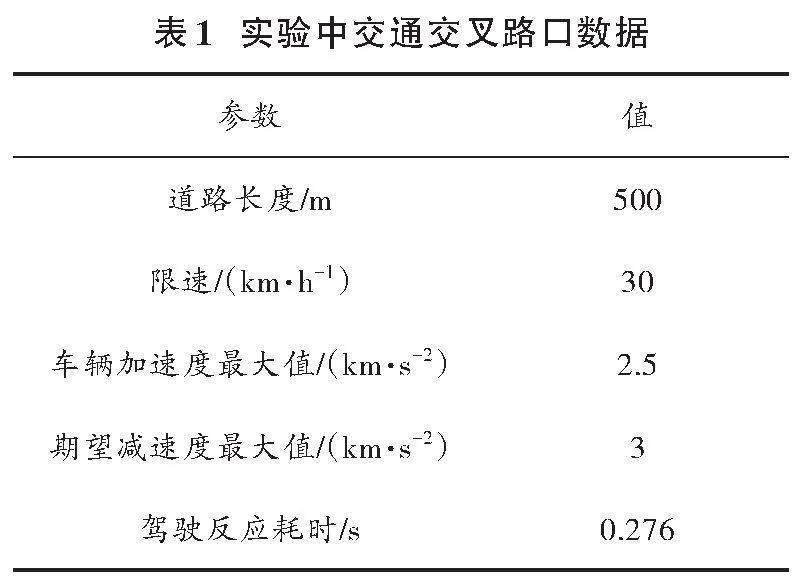
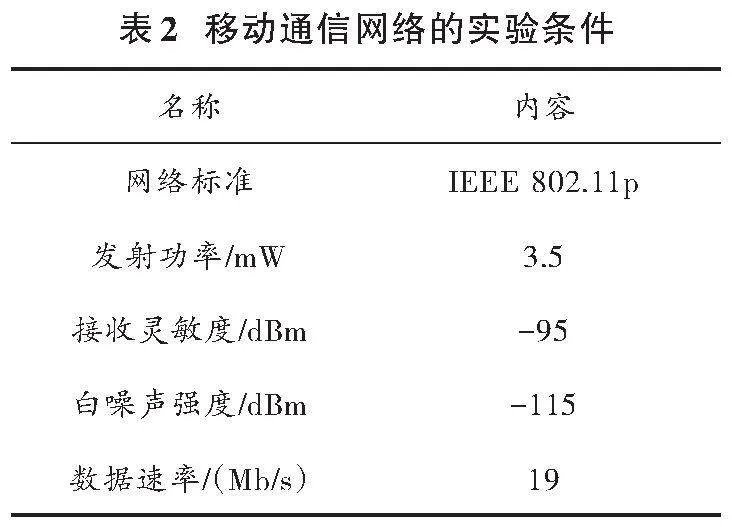
表1、表2分别为实验中交通交叉路口与移动通信网络的实验条件。
2.2" 车辆防碰撞安全预警效果
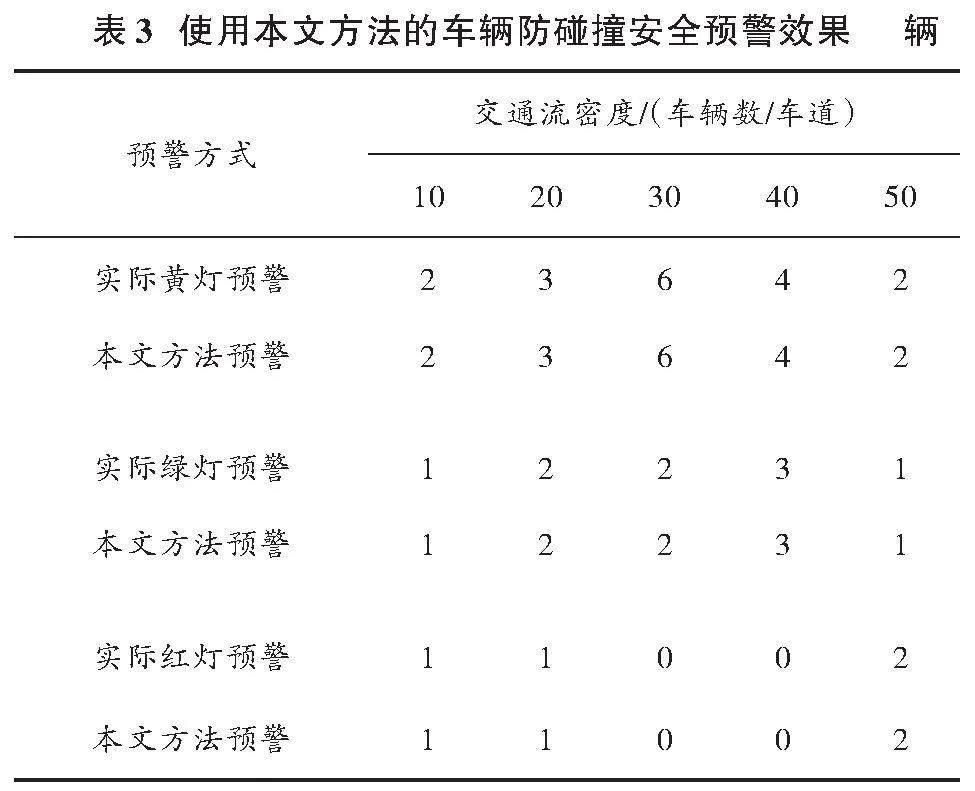
表3所示为使用本文方法所得车辆防碰撞安全预警效果。
分析表3数据可知,本文方法对交叉路口车辆防碰撞安全预警的结果与实际需求预警状态匹配无误,证明了本文方法在不同交通流密度工况中,对交叉路口车辆防碰撞预警结果的准确性。
图7是使用本文方法后交叉路口车辆通行状态。结合图7实验结果可知,使用本文方法后交叉路口车辆均安全通行,未出现碰撞问题。说明本文方法可进行准确的交叉路口车辆防碰撞安全预警,从而保证交叉路口车辆通行状态安全可靠。
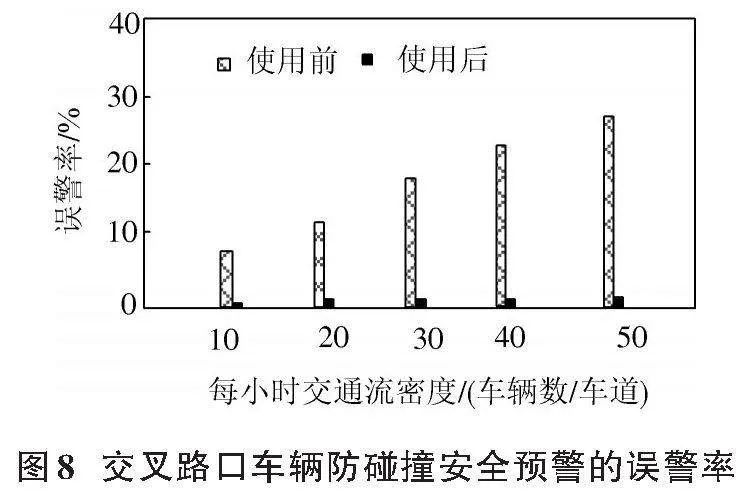
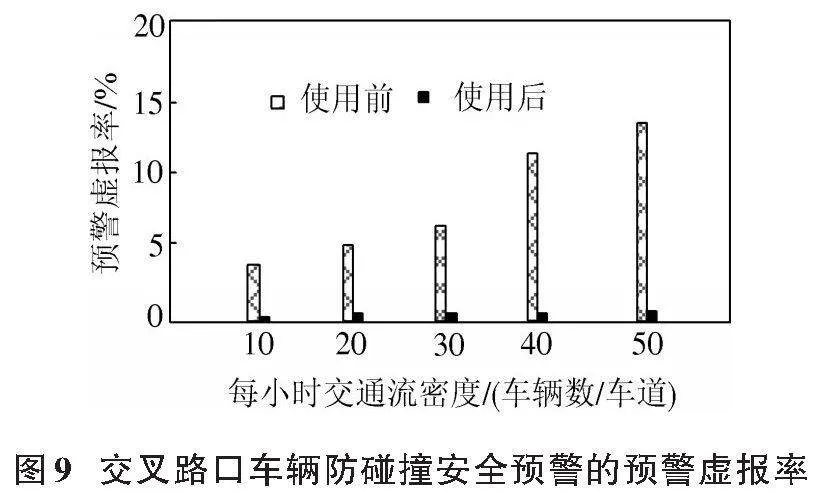
综合分析本文方法对交叉路口的车辆防碰撞预警效果,引入评价交叉路口车辆防碰撞安全预警效果的误警率[θ]、预警虚报率[ρ]这两个指标,公式如下:
式中:[Ω1]、[Γ1]分别表示车辆发出预警时车辆出现碰撞的次数、预警提醒次数;[Ω2]、[Γ2]分别表示没有预警提醒时交叉路口车辆碰撞次数、需要预警但没有显示预警的次数。
使用本文方法前后,交叉路口车辆防碰撞安全预警时的误警率与预警虚报率如图8、图9所示。
由图8、图9实验数据可知,使用本文方法前后,交叉路口车辆防碰撞安全预警的误警率、预警虚报率对比明显,说明本文方法能够降低交叉路口车辆防碰撞安全预警的误警率、预警虚报率,误警率、预警虚报率的降低幅度明显。
3" 结" 论
本文提出一种基于安全距离和时空网格的交叉路口车辆防碰撞安全预警方法,能够将车辆时空信息转换为时空网格状态,计算车辆安全距离,并将时空网格的占据状态与车辆安全距离相结合,准确判断车辆是否存在碰撞概率,从而发出预警,具有可用价值。本文研究可协助车辆安全行驶,在出现碰撞概率时发出警报。
参考文献
[1] 刘利杰,周永利,黄国君.准能露天煤矿车辆防撞预警系统设计及应用[J].煤炭工程,2021,53(z1):18⁃21.
[2] 杨炜,刘佳俊,刘晶郁.车联网环境下考虑前方车辆驾驶人意图的汽车主动预警防撞模型[J].机械工程学报,2021,57(22):284⁃295.
[3] 李达,邓钧君,张照生,等.电动车辆动力电池安全预警策略研究综述[J].汽车工程,2023,45(8):1392⁃1407.
[4] 陆玉.紧急工况下的两车辆协同安全预警模型研究[J].控制工程,2021,28(2):237⁃244.
[5] 申海洋,霍魁,王德喜.基于机器视觉和深度学习的车辆碰撞预警算法研究[J].山西大学学报(自然科学版),2023,46(3):617⁃627.
[6] 赵睿,李云,胡宏宇,等.基于V2I通信的交叉口车辆碰撞预警方法[J].吉林大学学报(工学版),2023,53(4):1019⁃1029.
[7] 袁守利,郭铮.考虑驾驶员反应时间的车辆碰撞预警模型[J].安全与环境学报,2021,21(1):270⁃276.
[8] 邹斌,干雷.无信号灯十字路口行车碰撞预警方法研究[J].武汉理工大学学报,2022,44(4):23⁃29.
[9] 陈宁,姜冉,张轩.自动驾驶车辆风险预测模型的设计与仿真[J].计算机仿真,2022,39(5):117⁃120.
[10] 张惠玲,孔德学,敖谷昌,等.车辆主动防碰撞控制技术研究进展[J].高技术通讯,2022,32(3):314⁃326.
[11] 付裕.基于模糊理论的智能车辆防碰撞预警系统设计[J].无线互联科技,2022,19(23):33⁃35.
[12] 张叶萃.间断冰雪路面下基于V2X的车辆防碰撞控制策略研究[D].长春:吉林大学,2023.
[13] 李文礼,赵瑞,廖达明,等.基于路面估计的车辆避撞控制策略研究[J].浙江工业大学学报,2022,50(5):534⁃541.
猜你喜欢
郑州大学学报(工学版)(2024年2期)2024-03-09 02:42:46
科学技术创新(2020年24期)2020-08-12 06:47:58
价值工程(2019年18期)2019-07-25 04:01:32
石油沥青(2019年2期)2019-04-28 08:42:24
汽车文摘(2017年9期)2017-12-06 05:09:19
汽车文摘(2017年1期)2017-12-05 13:36:03
汽车文摘(2015年1期)2016-01-13 03:54:03
汽车文摘(2015年11期)2015-12-14 19:10:11
汽车文摘(2015年11期)2015-12-02 03:02:52
汽车文摘(2014年12期)2014-12-15 22:25:34