
基于模型预测控制的重载列车轨迹跟踪研究
2024-08-23 00:00:00张波李荣喆马睿杰
河南科技 2024年14期
关键词:模型预测控制


















摘 要:【目的】为提升重载列车的安全性、平稳性、节能性,减小车钩力,提出了一种基于模型预测控制的重载列车轨迹跟踪方法。【方法】首先,建立考虑车辆间车钩力的重载列车多质点动力学模型;其次,将列车纵向冲动、运行能耗、速度跟踪误差转化为符合模型预测控制框架的问题;最后,设计基于模型预测控制算法的速度跟踪控制器,该控制器以目标速度曲线为输入,列车控制力为输出。【结果】提出了以提高参考速度曲线跟踪精度、减小车钩力冲动和降低列车运行能耗为目标的模型预测控制算法。【结论】基于实际车辆和线路数据开展了不同预测步长和不同权重系数对控制性能影响的仿真分析。通过仿真试验,对比验证了所提算法的有效性,该算法能够提高列车速度跟踪精度、减小车钩力冲动和降低列车运行能耗。
关键词:重载列车;多质点模型;列车自动驾驶;模型预测控制
中图分类号:U268" " 文献标志码:A" " 文章编号:1003-5168(2024)14-0004-07
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.14.001
Research on Trajectory Tracking of Heavy-Haul Trains Based on Model Predictive Control
Abstract: [Purposes] To enhance the safety, stability, and energy efficiency of overloaded trains and reduce the coupling force between cars, this paper proposes a trajectory tracking method for overloaded trains based on model predictive control.[Methods] Firstly, a multi-mass dynamic model of overloaded trains considering the coupling force between vehicles is established. Then, the longitudinal impulse of the train, train energy consumption, and speed tracking errors are transformed into problems conforming to the model predictive control framework. Finally, a speed tracking controller based on model predictive control algorithm is designed, with the target speed curve as input and train control force as output.[Findings] This paper proposes a model predictive control algorithm aimed at improving the accuracy of tracking the reference speed curve, reducing the impulse of the coupling force, and lowering train energy consumption.[Conclusions] Simulation analyses are conducted based on actual vehicle and track data to examine the effects of different prediction step lengths and weight coefficients on control performance. Through comparative simulation experiments, the effectiveness of the proposed algorithm is verified, demonstrating its ability to enhance the accuracy of train speed tracking, reduce coupling force impulse, and decrease train energy consumption .
Keywords:heavy-haul trains; multi-particle model;autonomous train driving; model predictive control
0 引言
铁路运输是当今社会中高效、便捷且成本较低的煤矿运输方式之一,我国化石能源呈现较强的地域性特色,西部地区的煤、矿石等化石能源的储存量较大,但从西部向东部发达地区运输过程中的线路环境较为复杂,且包括多个含有长大下坡的困难区段[1]。另外,为提高运输效率,列车载重量日益增大,车辆直接作用力也较大,导致重载列车车钩力冲动比普通列车更大且变化复杂,对重载列车运输提出了更高要求[2]。未来铁路货运的发展方向将是自动化、数字化、智能化和绿色化。在这个过程中,重载列车的自动控制将是未来发展的关键技术之一,其能在保证列车安全运行的同时,有效提高铁路运营服务质量[3]。对重载列车运行控制技术的研究是实现列车自动驾驶的重要环节,本研究将针对提高列车速度曲线跟踪精度、减小车钩力冲动和降低列车运行能耗的运行控制算法进行研究。
列车自动控制算法中应用最为广泛的经典算法主要有PID及其改进算法[4],这些算法的优点在于结构简单、便于实现;缺点在于其机理为将当前值与期望值进行调节,导致控制列车时级位切换过于频繁,运行平稳性会降低,不利于节能驾驶。一些改进的PID算法较基础的PID控制器而言性能更加优良,并在法国的巴黎、里尔等城市实现了应用[5]。冯健[6]将线性二次调节器引入列车精确停车控制中,并设计与PID控制器的仿真对比验证。结果表明,相较于PID控制器,线性二次调节器停车精度更高,且操纵级位的切换频率更低。自适应算法因其适应性强,无须手动调整参数的优点,也被应用于列车控制领域中[7]。吴鹏[8]设计了基于自适应滑模控制的停车控制器,考虑了外部扰动对控制器的影响,并基于城轨列车模型进行仿真计算,实现了系统参数不确定和具有外部扰动的情况下精确停车,并能保证乘客的舒适性。Wang等[9]在考虑外部未知阻力扰动的基础上,对列车在运行过程中使用参数辨识的方法,实时获取较为准确的列车制动特性参数,并设计广义预测控制算法,实现列车速度跟踪控制。另有学者将智能算法应用于列车速度跟踪控制,其方法主要根据数据和规则开展[10-13],不依赖于准确的模型。王义惠等[14]利用机器学习的方法针对朔黄铁路的历史运营数据,开展以减小重载列车纵向冲动为目标的多车智能协同控制研究。
模型预测控制的特征是预测模型、滚动优化、反馈校正,在控制器设计中可以充分考虑到列车的各种约束和多目标优化,更适合应用于列车控制领域。王鹏玲[15]首先根据多目标优化的列车参考速度曲线,然后引入模型预测控制设计考虑列车安全追踪的列车速度跟踪控制器。郭洋洋[16]设计了模糊控制与预测控制结合的高速速度跟踪控制器,并根据实际线路条件,计算了列车模拟速度曲线,以此为目标进行速度跟踪仿真验证,仿真结果验证了算法的有效性。付雅婷等[17]针对重载列车速度跟踪控制问题,引入了一种改进的广义模型预测控制算法,提高了在线求解最优控制输入的速度。Lin等[18-19]针对处于长大下坡线路的重载列车驾驶问题,建立了再生制动和空气制动列车控制模型,经过数值仿真,发现在长大下坡区段全电制动工况比使用惰行工况更加节能,算法对比模糊预测控制取得了更优的节能效果。上述的研究从多种角度对列车的运行控制进行了阐述,但较少有研究将重载列车车辆间的车钩力限制纳入控制问题的求解约束中。而重载列车由于其车身长,整体重量大的特性,如果不对车厢间车钩力限制纳入考虑之中,将无法保证重载列车运行安全。本研究以重载列车为研究对象,首先建立考虑车钩力的重载列车多质点运动学模型;然后根据运动学方程转化状态空间方程,并建立以速度跟踪精度、车钩力冲动和列车运行能耗为价值函数的模型预测控制问题;最后基于HXD1电力机车与朔黄铁路部分区段,开展不同预测步长和不同权重系数下控制器的性能验证。
1 列车运动学模型
重载列车在铁路上进行运输作业时会受到多种力的作用,包括运行阻力、机车牵引力、列车制动力等。列车运动学模型的建立是后续研究控制方法的基础,在以往的研究中,多数学者采用单质点模型进行列车建模。该方法将列车视作一个质点,以坡段为单位,虽然计算过程简单,但当经过变坡点时,附加阻力会发生阶跃跳变现象,准确度有待提升。
1.1 列车多质点模型
为改善单质点模型不精确的问题,本研究建立了重载列车多质点运动学模型,除了对列车整体进行受力分析外,对车厢间的相互作用力也进行了详细分析,如图1所示。
除了首尾两节车辆缺少一个车间偶合力之外,中间车辆的受力分析均相同。定义车辆编组数目为[n];第[i]辆车的质量、位移和速度分别为[mi]、[si和vi];第[i]辆车所受的牵引力、制动力、运行阻力、前车车钩力和后车车钩力分别为[Fti]、[Bi]、[Wi]、[Fℎi−1]、[Fℎi]。
1.2 列车受力分析
列车的运行阻力由基本运行阻力[Wb]与线路附加阻力[Wa]组成。基本运行阻力又可分为机械阻力[Wmac]与空气阻力[Wair],其中机械阻力与列车运行速度成正比,空气阻力与速度的平方成正比,其计算可由Davis表示见式(1)。
[Wb=Wmac+Wair=(c0+c1vi+c2v2i)⋅mi⋅g⋅10−3]" " (1)
式中:[c0]、[c1]、[c2]为基本运行阻力系数;[g]为重力加速度常数,取9.81 m/s2;[mi]为第[i]辆车的质量,t;[vi]为第[i]辆车的速度,m/s。
列车的附加阻力与所处线路有关,在坡道上运行时,坡道附加阻力[Wi]是由列车所受到的重力分力引起的,曲线附加阻力[Wr]是由线路钢轨对车辆内外轮挤压所引起的,隧道附加阻力[Wt]是列车经过隧道时对隧道内空气挤压所引起的,以上阻力单位均为kN。计算分别见式(2)至式(4)。
式中:[θ]为所处线路坡道的坡度千分数,上坡为正、下坡为负;[R]为所处线路的曲线半径,m;[l]为所处线路的隧道的长度,km。
车辆与车辆之间通过车钩进行物理耦合连接,从而实现力在车辆间的传递。这种耦合关系用“弹性—阻尼”部件进行描述,其结构简图如图2所示。
缓冲器在车辆连接中起到缓和与传递列车力的作用,其性能与特性直接影响到车辆间的冲动状态,MT-2型摩擦式缓冲器在我国重载货运列车上应用较为广泛,其性能优异、结构简单、适用性强、成本低[20]。当MT-2缓冲器受力时,由摩擦力提供阻尼,其特性见式(5)至(7)。
式中:[st]、[st-Δt]分别为相邻车辆在当前时刻与上一时刻的相对位移,单位为m;[vt]、[vt-Δt]分别为相邻车辆在当前时刻与上一时刻的相对速度,m/s;[fℎl]、 [fℎl]分别为缓冲器的加载曲线和卸载曲线;[Fℎ(st,st)]为列车的车钩力,kN。
综上所述,通过受力分析并根据牛顿第二定律,建立重载列车多质点动力学方程见式(8)。
2 模型预测控制器设计
为实现重载列车的安全、平稳、节能运行,理想的方法是对优化的参考曲线进行跟踪,以获得更好的控制效果。模型预测控制方法通过在有限预测时域内,在每个采样时刻,利用当前的状态来求解最优控制问题产生的最优控制序列,并将控制序列的第一个控制量作用于预测模型。同时,重载列车在运行过程中会受到自身牵引特性的限制和轮轨黏着限制以外,还有基于安全考虑的其他强制约束,而模型预测控制可以直接将系统的约束纳入考虑,因此,模型预测控制在解决重载列车控制问题上具有明显优势。
2.1 预测模型转化
模型预测控制算法是以状态方程为基础开展的。因此,需要将运动学方程转化为符合预测模型的状态空间方程。
地铁列车与高铁列车是分散式动力单元,不同的是重载列车是动力集中式编组,仅有机车才能提供列车牵引力和电制动力,其余车辆只能提供空气制动力。牵引力与制动力需要满足的约束条件见式(9)、式(10)。
[uj∈[−Bmax,Ftmax]] (9)
[uc∈[−Bairmin,−Bairmax]] (10)
式中:[uj]和[uc]分别为机车的控制力和车辆的控制力,kN;[Bmax]、[Ftmax]、[Bairmin]、[Bairmax]分别为机车的最大制动力、机制的最大牵引力、车辆的最小空气制动力、车辆的最大空气制动力,kN。
列车的车钩力大小取决于相邻车辆之间的相对位移与相对速度,表达式见式(11)。
因此,对于单节车辆[i]的运动学方程就可以转化为式(12)。
第i辆车与第i+1辆车的相对速度表示见式(13)。
2.2 线性化处理
重载列车的牵引特性、制动特性、基本阻力、车钩力都具有非线性关系,从而导致不同的控制序列可能会实现相同的稳态,增加了问题求解的复杂度。因此,有必要将重载列车模型非线性部分进行处理,便于控制器的设计。
车钩缓冲器的“弹性—阻尼”作用导致了列车模型的非线性特征,且结果难以测量,对这一部分的线性化可以忽略[di]项部分,简化后的列车状态方程见式(14)至式(16)。
式中:[u'i]为经过等校后的控制输入量,为便于书写,后续[u'i]用[ui]进行表示,kN;[γi]为经过等校后的第[i]节车辆的部分运行阻力,kN;[c0i、c1i、c2i]为第i列车的列车系数;[Wai]为第i列车阻力,kN。
定义重载列车的速度及相邻车辆的相对位移为系统的状态量[x],即[x=[v1,v2,…,vn,s12,s23,…,sn−1n]T],系统的控制输入[u]为[u=[u1,u2,…,un]T]。从而系统的状态空间方程见式(17)至式(22)。
用零阶保持器即可将上述连续时域状态空间方程进行离散化。
2.3 模型预测问题构建
[fT2=2λe[γ1,…,γn]]" (27)
式中:[t0]和[te]分别表示列车运行的开始时刻与结束时刻;[λv]、[λe]、[λf]分别为速度跟踪误差、列车运行能耗、车钩力冲动的权重系数。
重载列车运行过程受到牵引力、制动力、车钩力等限制,为确保列车运行安全性,需要设置控制问题的约束条件见式(28)。
[uimin≤ui+γi≤uimax, i=1,2,…,nΔuimin≤Δui+Δγi≤Δuimax, j=1,2,…,nFℎmin≤Fℎi≤Fℎmax, k=1,2,…,n−1] (28)
式中:[uimin]和[uimax]为重载列车控制力的最小值和最大值,kN;[Δuimin]和[Δuimax]为相邻两步长列车控制力变化的最小值和最大值,单位为kN;[Fℎmin]和[Fℎmax]为车辆间车钩力的最小值和最大值,kN。
模型预测问题是在状态空间方程式(17)与约束条件式(28)下实现目标函数式(23)最小。在预测时域[Np]内求出未来[Nc]步长控制时域的输入量,每次取控制序列中的第一个输入作为实际系统的输入,在下一采样时刻取更新的状态量来重新计算,实现滚动优化。
3 仿真验证
为验证本研究所提的重载列车运行控制算法的正确性和有效性,在MATLAB环境下进行编程,开展基于模型预测控制算法的仿真优化,包括不同预测时域下的对比仿真和不同权重系数下的对比仿真。本研究选用的重载列车编组为“1+1”编组,总重量为20 000 t,电力牵引机车为HXD1型,该机车最大功率9 600 kW,列车参数见表1。仿真线路选取朔黄线路的定州西至安国区段,跟踪的目标参考曲线选取为实际运行所采集的数据。
本研究控制器设置的控制步长均为5 m,对比仿真案例的预测步长[Np]与各项权重系数[λv]、[λe]、[λf]见表2。
Case1、Case2、Case3的预测步长不同,其余权重系数均相同,将三者作为预测步长仿真组。
Case1、Case4、Case5的预测步长相同,但是Case4的能耗权重系数增大至Case1的10倍,Case5的速度误差与车钩力冲动权重系数增大至原来10倍,将三者作为权重系数组。对分类后的两组进行对比仿真验证。
不同预测步长时的重载列车速度跟踪情况如图3所示,点线和虚线分别表示ATP限速和目标参考速度曲线。由图 3可知,三种案例下的控制器都能实现在不超过限速的情况下,对参考速度曲线实现较准确的跟踪,从速度误差曲线来看,Case2的速度误差较其他两者更大。
不同预测步长时的牵引力、电制动力、车钩力情况如图4所示。由图4可知,三种参数设置下的牵引力、电制动力、车钩力均在约束限制内,其中Case2和Case3的制动力出现了与所需的参考力差距较大的情况。列车的最大车钩力出现在仿真初始阶段,这是因为此时列车所处线路为下坡,且车速较大。
设置不同预测步长时性能指标见表 3。由表3可知,预测步长由10降低至5时,速度跟踪性能、列车纵向冲动、运行能耗三项性能均有所降低,速度误差、车钩力、能耗均增加。相较于Case1,Case3的速度误差有所增大,但车钩力与列车运行能耗都得到了降低,这可能是因为Case3预测了较大的步长,造成产生了较大的误差,从而降低了速度跟踪精度。
由此可见不是预测步长越大,跟踪性能就越好,同时预测步长增大也会带来计算量增大的问题。
不同权重系数时的重载列车速度状态情况如图 5所示。由图5可知,三组权重系数下的控制器都能实现在不超过限速的情况下,对参考速度曲线
实现较好的跟踪。从速度误差曲线来看,与预测步长组不同的是,权重系数对照组中三种案例的速度误差情况差别不大。
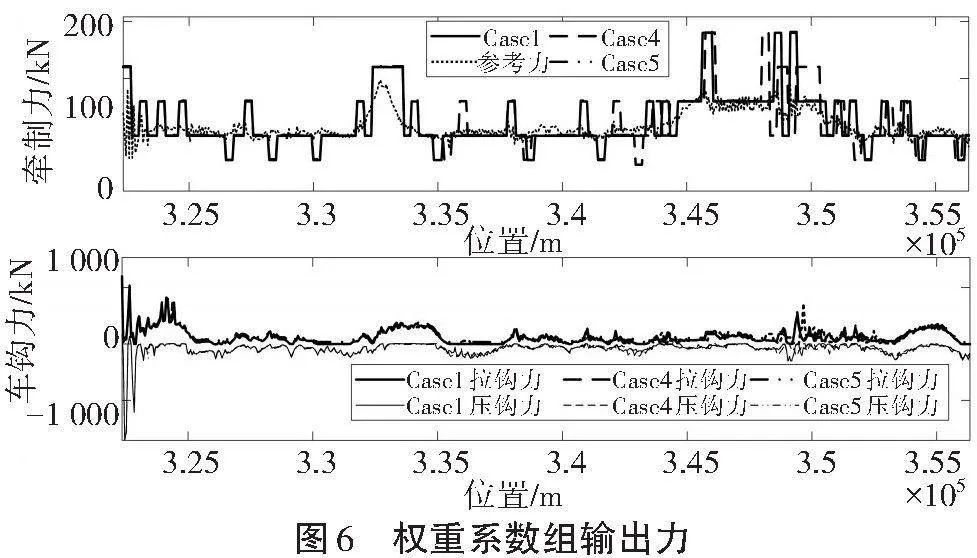
不同权重系数时的牵引力,电制动力、车钩力情况如图 6所示。由图6可知,三种参数设置下的牵引力、电制动力均能满足实际所需,Case5在仿真初始阶段出现了较大的列车压钩力。
设置不同权重系数时性能指标见表 4。由表 4可知,Case4与Case1相比,速度跟踪性能变化差异较小,列车纵向冲动有所增大,列车运行能耗由313.873 kW·h变化至306.188 kW·h,出现了明显的降低。这是因为相较于Case1,Case4在速度跟踪与纵向冲动权重系数不变的情况下,运行能耗权重系数由增大10倍时。而Case5与Case1相比,增大了速度跟踪与纵向冲动权重系数,但性能变化并不明显,可能是由于系统的动态特性导致对权重系数的变化不敏感所致。综上所述,在控制器实际投入列车运行中时,应综合考虑预测步长和权重系数对控制器性能的影响,挑选适合具体情况的控制参数配置以应对不同情况。
4 结论
本研究建立重载列车多质点运动学模型,研究考虑车厢间作用力的重载列车运行控制,将重载列车控制问题转化为模型预测控制问题,加入速度跟踪、运行能耗、车钩力冲动三项指标,设计了基于模型预测控制的列车速度跟踪控制算法。并采用HXD1机车特性与朔黄线路部分区段进行了数值仿真,设置了5种参数案例,分为预测步长与权重系数对照组进行分析,验证了本研究控制算法的有效性。仿真结果表明,在保证重载列车的牵引力、制动力、车钩力均在安全约束的限制条件下,本研究控制算法均能实现较好的跟踪效果。同时,通过选择合适的预测步长,可以保证较好跟踪性能的同时,不增加多余的计算量;通过选择不同的系统权重系数矩阵,可以实现目标中速度跟踪、运行能耗和车钩力冲动不同的侧重。综上所述,在实际列车运行控制中,应根据具体线路、运行需求等选择合适的控制器参数应用于列车。
参考文献:
[1]LU Q W,HE B B,WU M Z,et al. Establishment and analysis of energy consumption model of heavy-haul train on large long slope[J]. Energies,2018,11(4):965-965.
[2]王悉. 基于机器学习的重载列车智能驾驶方法研究[D]. 北京:北京交通大学,2017.
[3]刘贺文,赵海东,贾利民. 列车运行自动控制(ATO)算法的研究[J]. 中国铁道科学,2000(4):38-43.
[4]石卫师. 基于无模型自适应控制的城轨列车自动驾驶研究[J]. 铁道学报,2016,38(3):72-77.
[5]唐涛,黄良骥. 列车自动驾驶系统控制算法综述[J]. 铁道学报,2003(2): 98-102.
[6]冯健. 基于LQR算法的列车自动驾驶系统最优控制研究[D]. 成都:西南交通大学, 2014.
[7]罗恒钰,徐洪泽 . 基于参考模型的 ATO 自适应控制算法研究[J]. 铁道学报,2013(7):68-73.
[8]吴鹏. 城轨列车精确停车算法研究[D]. 成都:西南交通大学,2015.
[9]WANG Q Y,WU P,LIANG Z C, et al. The hierarchical real-time control of high speed trains for automatic train operation[C]//International conference on railway engineering design and operation,2014.
[10]WANG X,TANG T. Optimal control of heavy haul train on steep downward slope[J]." 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), 2016.
[11]TANG H Y,WANG Y,LIU X,et al. Reinforcement learning approach for optimal control of multiple electric locomotives in a heavy-haul freight train:A Double-switch-q-network architecture[J]. Knowledge-Based Systems, 2020.
[12]YIN J T,CHEN D W,LI L X. Intelligent train operation algorithms for subway by expert system and reinforcement learning[J]. IEEE Transactions on Intelligent Transportation Systems,2014,15(6):2561–2571.
[13]王悉. 基于机器学习的重载列车智能驾驶方法研究[D]. 北京:北京交通大学,2017.
[14]王义惠,罗仁士,于振宇,等 . 考虑列车 ATP 限速的ATO控制算法研究[J]. 铁道学报,2012,34(5):59-64.
[15]王鹏玲. 面向冲突预测与化解的列车群运行优化控制方法研究[D]. 成都:西南交通大学,2017.
[16]郭洋洋. 基于模糊预测控制的高速列车自动驾驶研究[D]. 兰州:兰州交通大学,2020.
[17]付雅婷,原俊荣,李中奇,等. 基于钩缓约束的重载列车驾驶过程优化[J]. 自动化学报,2019,45(12):2355-2365.
[18]LIN X,GE X C,LIU Q Q,et al. On the Periodic Braking of Freight Trains on the Long Steep Downhill[C]//第35届中国控制会议,[2024-05-11].
[19]LIN X,WANG Q Y,WANG P L,et al. The energy-efficient operation problem of a freight train considering long-distance steep downhill sections[J]. Energies, 2017, 10(6): 794.
[20]杨辉,原俊荣,付雅婷,等. 重载列车QKX100与MT-2缓冲器动态特性[J]. 北京工业大学学报,2020,46(9):1018-1026.
猜你喜欢
科技视界(2017年35期)2018-03-09 20:37:34
科学与财富(2018年1期)2018-03-03 01:51:59
科技视界(2017年23期)2017-12-09 07:56:32
科技创新导报(2017年14期)2017-08-24 11:15:45
数字技术与应用(2016年10期)2017-04-01 22:02:08
哈尔滨理工大学学报(2016年6期)2017-02-21 20:49:45
哈尔滨理工大学学报(2016年6期)2017-02-21 17:45:40
科技创新导报(2016年20期)2016-12-14 08:55:17
科技资讯(2015年4期)2015-07-02 17:55:56
哈尔滨理工大学学报(2015年1期)2015-06-23 00:14:30
