
基于预测控制综合算法的控制器设计与仿真
2018-03-09 20:37包勇王倩陈敬松肖奔
科技视界 2017年35期
包勇+王倩+陈敬松+肖奔

【摘 要】模型预测控制综合设计方法通过设计一组满足特定要求的终端来保证系统稳定性。本文提出了一组满足该要求的约束条件,然后依据多参数二次规划来求解模型预测控制器,在Matlab环境下设计并且实现了一种基于模型预测综合控制方法的控制器的设计,最后通过仿真实验验证了该控制器的稳定性和鲁棒性。仿真结果表明,所设计的控制器可以用来求解基于模型预测控制综合设计方法的预测控制器。
【关键词】模型预测控制;代价函数;终端约束集;多参数二次规划;稳定性;鲁棒性
中图分类号: TP273 文献标识码: A 文章编号: 2095-2457(2017)35-0083-002
Controller Design and Simulation Based on Predictive Control Synthesis Algorithm
BAO Yong1 WANG Qian2 CHEN Jing-Song3 XIAO Ben4
(1.China Aeronautical Radio Research Institute, Shanghai 210233,China;2.China Aeronautical Radio Research Institute, Shanghai 210233,China;3.China Aeronautical Radio Research Institute,Shanghai 210233,China;4.Northwestern Polytechnical University,Xi'an 710000,China)
【Abstract】The model predictive control integrated design method ensures the stability of the system by designing a set of terminals that meet specific requirements.This paper presents a set of constraints to meet the requirements,and then solve the model predictive controller based on the multi-parameter quadratic programming.In the Matlab environment,a controller design based on the model predictive integrated control method is designed and implemented.Finally,Simulation results show the stability and robustness of the controller.The simulation results show that the designed controller can be used to solve the predictive controller based on the integrated design method of model predictive control.
【Key words】Model predictive control;Cost function;Terminal constraint set;Multi-parameter quadratic programming; stability;Robustness
0 引言
為了解决模型预测控制算法的稳定性问题,在模型预测控制的理论研究的基础上提出了模型预测控制综合设计方法。该设计方法通过设计一组终端条件来保证算法的稳定性,然后通过求解优化问题获得控制律。目前这种设计方法己从理论论证阶段转入到实际应用阶段,成为预测控制发展的一个重要研究方向。
本文根据模型预测控制综合设计方法,设计了模型预测控制器。在Matlab环境下对给定模型进行了仿真分析和优化计算。对所设计控制器的稳定性和鲁棒性进行了验证,实验结果表明所设计的模型预测控制器可实现对常见问题的求解。
1 算法原理
模型预测控制算法的基本策略是采用有限时域滚动优化方式来获取控制信号。其求解过程可以分为以下四步:(1)根据预测模型对对象在未来一段时间内的输出进行预测;(2)通过优化算法对所建立的代价函数进行优化,得到一个控制向量;(3)将控制向量的第一个值经修正后作用于对象,得到对象的当前输出值;(4)结合预测输出和当前输出对模型的状态进行校正。进入下一采样时刻后,循环执行上述各步骤。图1给出了预测控制的基本原理。
图1中的虚线将模型预测控制器的内部结构划分成模型预测、优化控制、反馈校正三个部分。模型预测控制对各部分的具体形式没有严格的限制,这在一定程度上促进了预测控制在工业过程中的广泛应用。
2 预测控制器设计
2.1 基本原理
在模型预测控制综合设计中,最优控制作为预测控制最重要的理论参照体系,Lyapunov稳定性分析方法作为其性能保证的基本方法,不变集等作为其基本工具,具有滚动时域特点的性能分析作为其研究核心。
模型预测控制综合设计方法就是通过添加一组终端条件,将模型预测控制中的有限域优化问题转为最优控制中的无限域优化问题,从而能够利用Lyapunov方法判定其稳定性。这就是模型预测控制综合设计的基本原理,其核心问题就是设计满足要求的终端条件。
下面给出了模型预测控制综合设计中各终端条件需要满足的条件。
定理1:假设终端约束集合(χf?奂Rn)、终端代价函数(F)及局部控制器(κf(x)∈χf,?坌x∈χf)分别满足下面的条件,则由这三者所决定的控制器可使闭环系统渐进稳定。endprint
(1)χf?奂X,且χf是包含原点在内的一个封闭的区域。
(2)κf(x)∈U,?坌x∈χf,即局部控制器也要满足输入约束条件。
(3)f[x,κf]∈χf,?坌x∈χf,即χf是κf条件下的一个正定不变集。
(4)[F+l][x,κf(x)]≤0,?坌x∈χf,其中F(xκf(x)]=F[f(x,u)]-F(x),即F(x)是一个局部Lyapunov函数。
2.2 控制器架构设计
假设被控系统可以描述为:
■(1)
式中,f(x,u)为非线性函数:系统输入及状态约束为u(k)∈U?奂Rm,x(k)∈X?奂Rn。
对于上述被控系统,选择二次性能指标作为优化目标函数,即:
JN(k)=■(x■■Qx■■+u■■Ru■)(2)
式中,QT=Q≥0为状态加权阵。当性能指标函数选择为上述二次目标函数时,满足定理1的各终端条件可以按照下面的方法进行设计。
终端代价函数设计为F(x)=xTPx,其中状态加权阵P通过黎卡蒂方程求解,计算公式如下:
P=ATPA+Q-KTRK(3)
其中矩阵R和K分别通过下面两式求得:
R=R+RTPB,K=R-1BTPA
局部控制器κf(x)选择线性反馈控制器κf(x)=-Kx,其中反馈系数矩阵K可由下式计算获得:
K=(R+BTPA)-1BTPA
终端约束集选择局部控制器的可行不变集EP={x:xTPx≤1}。
经过上面的设计,现在就可以将有限域优化性能指标式(2)转换成无限域优化性能指标,如式(4)所示。
JN(k)=x■■Px■+■(x■■Qx■+u■■Ru■)(4)
不难理解,终端代价函数实际上是对属于终端约束集合内的各个状态在采用布局控制器时无穷时域二次目标函数的一个上界。
2.3 控制器求解
采用多参数二次规划的方法和离线设计、在线综合的计算策略来解决预测控制器的求解问题。
这种求解思路先离线按照被控系统的状态约束条件将参数空间划分成若干个子空间,再依据各子空间里的有效约束项获得对应于该子空间的控制律计算公式,最后将所有子空间的求解公式存储在存储器当中,以备实时在线计算时使用。进入实时计算阶段后,首先要判断系统当前状态所在的子空间,然后调取相应的计算公式获取相应的空置律。进入下一采样时刻后,再循环执行上述在线过程。
以带有约束条件的二次性能指标式(4)为例,说明采用多参数二次规划方法求解模型预测控制问题过程。式(4)的约束为:
xmin≤xk≤xmax(k=0,…,N)
umin≤uk≤umax(k=0,…,N)
令xk=Akx0+■AjBuk-1-j,则式(4)可以表示为多参数二次规划的一般形式:
■(5)
式中,U■U+H-1FTx,参数 通过 和(1)式求的。再令 ,将式(5)转化成下式:
■(6)
式中,S■E+GH-1FT,其余参数与式(5)中的取值相同。对于式(6)所示的优化问题,可以通过一阶KKT最有条件求解,即:
z=H-1■T(■H-1■T)-1(■+Sx)(7)
而最优控制向量U可以通过下式反解得到
z■U+H-1FTx
3 仿真实验
考虑离散系统状态空间模型如下
xk+1=9.8 11.3-12.9 19.4x■+12u■(8)
系统约束条件为
00≤x■≤1.21.2,-0.1≤uk≤0.2,-1≤δu■≤1(9)
根据式(8)可选择二次函数作为系统的优化目标函数,所以无限域最优控制问题可表示为
minuVN,M=minuxTNPxN+■xkTQxk+■(uTkRuuk+δukTRδuuk)(10)
选取优化时P=10,控制时域M=2,二次型性能指标的输入加权阵Ru=0.001,输入速率加权阵选择Rδu=0.0001,状态加权阵Q=I。各终端参考2.2节中的方法进行设计,终端代价函数的加权阵P可通过求解黎卡提方程得到:
P=0.5801 -0.2228-02228 0.1065
线性局部控制器状态反馈系数矩阵K可表示为
K=[4.6006 1.8261]
终端约束集选择为椭球集合
Ep={x:xTPx≤1}
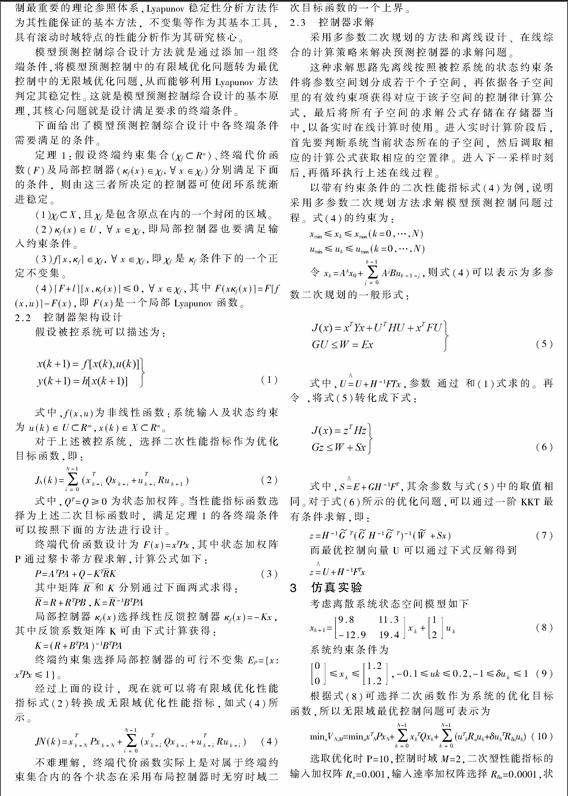
将上述模型参数和约束条件带入带预测控制软件中,可得到期望的模型预测控制器。选取采样时间2秒,输出稳定向量为2,截断时间1000。在以单位阶跃信号为输入的条件下,在Matlab环境下进行仿真实验,系统的输出和控制信号随时间变化如图2所示。
由上图可以看出,系统输出可以较好的跟随参考信号,并且没有超调没有误差和震荡,系统调节时间14S。注意到控制輸入u1在2s到12s时达到饱和,所以应该增大对于输入的约束条件的上界,使系统输入达到最大,从而获得更好地控制效果。调整系统约束调节为
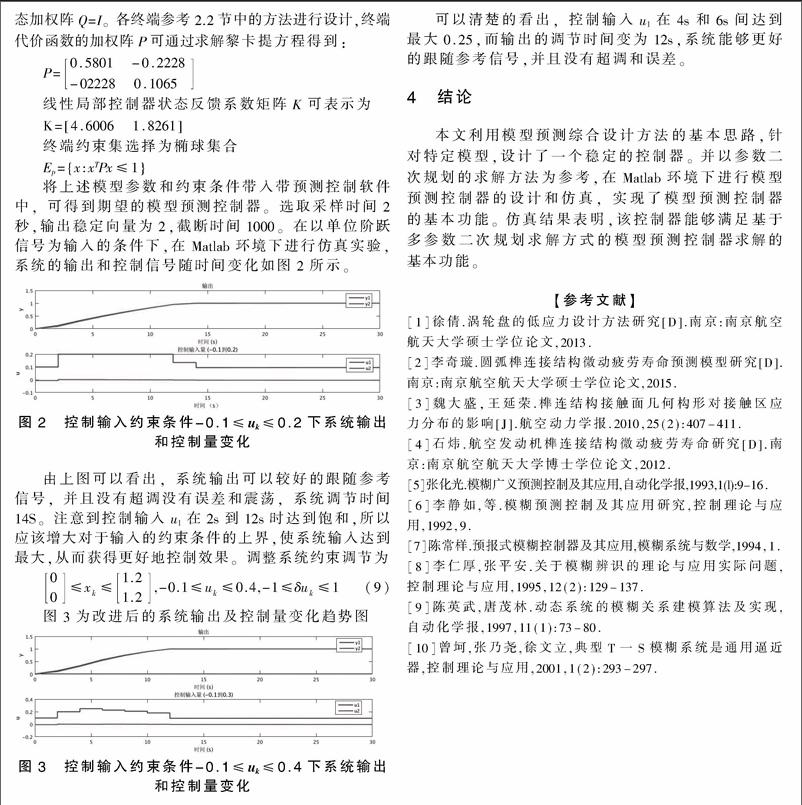
00≤x■≤1.21.2,-0.1≤u■≤0.4,-1≤δu■≤1(9)
可以清楚的看出,控制输入u1在4s和6s间达到最大0.25,而输出的调节时间变为12s,系统能够更好的跟随参考信号,并且没有超调和误差。
4 结论
本文利用模型预测综合设计方法的基本思路,针对特定模型,设计了一个稳定的控制器。并以参数二次规划的求解方法为参考,在Matlab环境下进行模型预测控制器的设计和仿真,实现了模型预测控制器的基本功能。仿真结果表明,该控制器能够满足基于多参数二次规划求解方式的模型预测控制器求解的基本功能。
【参考文献】
[1]徐倩.涡轮盘的低应力设计方法研究[D].南京:南京航空航天大学硕士学位论文,2013.
[2]李奇璇.圆弧榫连接结构微动疲劳寿命预测模型研究[D].南京:南京航空航天大学硕士学位论文,2015.
[3]魏大盛,王延荣.榫连结构接触面几何构形对接触区应力分布的影响[J].航空动力学报.2010,25(2):407-411.
[4]石炜.航空发动机榫连接结构微动疲劳寿命研究[D].南京:南京航空航天大学博士学位论文,2012.
[5]张化光.模糊广义预测控制及其应用,自动化学报,1993,1(l):9-16.
[6]李静如,等.模糊预测控制及其应用研究,控制理论与应用,1992,9.
[7]陈常样.预报式模糊控制器及其应用,模糊系统与数学,1994,1.
[8]李仁厚,张平安.关于模糊辨识的理论与应用实际问题,控制理论与应用,1995,12(2):129-137.
[9]陈英武,唐茂林.动态系统的模糊关系建模算法及实现,自动化学报,1997,11(1):73-80.
[10]曾坷,张乃尧,徐文立,典型T一S模糊系统是通用逼近器,控制理论与应用,2001,1(2):293-297.endprint
猜你喜欢
数学物理学报(2021年5期)2021-11-19
石油沥青(2021年4期)2021-10-14
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
系统管理学报(2018年2期)2018-08-13
数学物理学报(2018年1期)2018-03-26
厦门理工学院学报(2016年1期)2016-12-01
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
