
智能有机肥施肥机设计及验证
2024-05-22 02:58郝延杰刘树泽王子强王鹏军代惠芹孙冬霞
中国农机化学报 2024年2期
郝延杰 刘树泽 王子强 王鹏军 代惠芹 孙冬霞

摘要:针对有机肥施肥存在智能化程度低等问题,研发设计一种智能施肥机。整机动力部分采用液压系统和机械系统结合方式,控制系统采用FPGA技术,利用前期的数据处理得到施肥量、施肥幅宽与输肥机构挡位、控肥闸门开度和肥料落点控制罩角度关系式及施肥量和幅宽的相关性,实现施肥量、施肥幅宽的变量调节及可视控制,并可根据施肥量预测幅宽的大小。验证结果表明:该施肥机控制系统程序稳定可靠,施肥量误差为2.58%,施肥幅宽误差为3.53%,作业效果良好,各项技术指标满足农艺要求。
关键词:智能;施肥机;可视控制;有机肥;田间管理机械
中图分类号:S224.21
文献标识码:A
文章编号:20955553 (2024) 02027506
收稿日期:2022年5月10日 修回日期:2022年8月20日
基金项目:山东省重点研发计划(2019GNC106114)
第一作者:郝延杰,男,1991年生,山东德州人,硕士,助理研究员;研究方向为农机装备。Email: bznkyhyj@163.com
通讯作者:孙冬霞,女,1981年生,山东潍坊人,硕士,副研究员;研究方向为施肥机设计及理论。Email: bznjsdx@163.com
Design and verification of intelligent organic fertilizer applicator
Hao Yanjie1, Liu Shuze1, Wang Ziqiang1, Wang Pengjun2, Dai Huiqin1, Sun Dongxia1
(1. Binzhou Academy of Agricultural Sciences, Binzhou, 256600, China; 2. Nanjing Institute of
Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing, 210014, China)
Abstract:
Aiming at the problem of low intelligent degree of organic fertilizer fertilization, an intelligent fertilizer application machine is developed. The power part of the whole machine adopts the combination of hydraulic system and mechanical system, and the control system adopts FPGA technology. Using the data processing in the early stage, the relationship between the amount of fertilizer application, the width of fertilizer application and the gear position of the fertilizer delivery mechanism, the opening of the fertilizer control gate and the angle of the fertilizer drop point control cover and the correlation between the amount of fertilizer application and the width are obtained, and the variable adjustment and visual control of the amount of fertilizer application and the width can be realized, and the size of the width can be predicted according to the amount of fertilizer application. The results show that the program of the control system is stable and reliable, the error of fertilizer application amount is 2.58%, the error of fertilizer width is 3.53%, and the operation effect is good, and the technical indexes meet the agronomic requirements.
Keywords:
intelligence; fertilizer applicator; visual control; organic fertilizer; field management machinery
0 引言
有机肥的推广使用可提高农产品品质,降低农业对化肥的依赖程度,防止农业面源污染[1]。而精准施肥是精准农业实施的关键一环,主要分为基于处方图的变量施肥作業和基于实时传感器的变量施肥作业两种方式[23]。两种施肥方式都是为了实现信息感知、精准决策、智能控制和变量投入的充分结合[4]。国外相关技术的研究始于20世纪 50年代,90年代快速发展,到目前已针对稻麦、玉米、大豆等大田作物开发出图像检测、光谱/光电传感、电容传感、电液控制等专用种肥播施监测与变量控制技术,形成了较为完善的系列装备[57],已经商品化的有美国John Deere变量撒肥机、Flexi Soil变量施肥播种机等。国内外学者针对变量施肥已有部分研究。金鑫等[8]利用基于CAN总线通信协议下的车载传感器与PLC控制融合技术,设计了小麦精量播种变量施肥机,试验结果表明,整机监控系统能够适应复杂田间环境,肥料堵塞报警误差小于2%,变量施肥准确率超过96%。冬小麦返青期地表追施的氮肥易挥发导致肥料利用率低,目前追肥过程中也缺少深施氮肥作业装备,冯慧敏等[9]针对此问题,设计的基于拖拉机自动导航技术的液压系统驱动排肥机构实现了精准对行深施氮肥。余洪锋等[10]构建了一套基于简易电子处方图系统的变量施肥系统,对外槽轮施肥播种器结构进行优化设计,提高了播量精度和稳定性。宿宁[11]以外槽轮式排肥器为主要研究对象,针对其模型特点,对排肥量和排肥器结构参数关系进行分析建模,研究变量施肥的相关控制参数,得到了调节外槽轮有效工作长度和调节外槽轮与施肥机地轮传动比两种可用于外槽轮式排肥器的变量施肥控制策略,并基于这两种控制策略分别进行了变量施肥应用系统的探索。
但目前大多数的研究都是控制施肥机构转速、外槽轮长度或其他参数来实现,在施肥量较大时施肥精度较低,这种随时改变对于工作机构的可靠性是一个挑战。基于此,设计一种工作可靠的智能施肥机,结合我国目前农用拖拉机数量较多的优势,利用拖拉机PTO对施肥机构提供可靠稳定动力,通过组合控制输肥机构挡位、肥料落点控制罩角度和控肥闸门开度来进行施肥量及施肥幅宽的调整,实现精准控制。
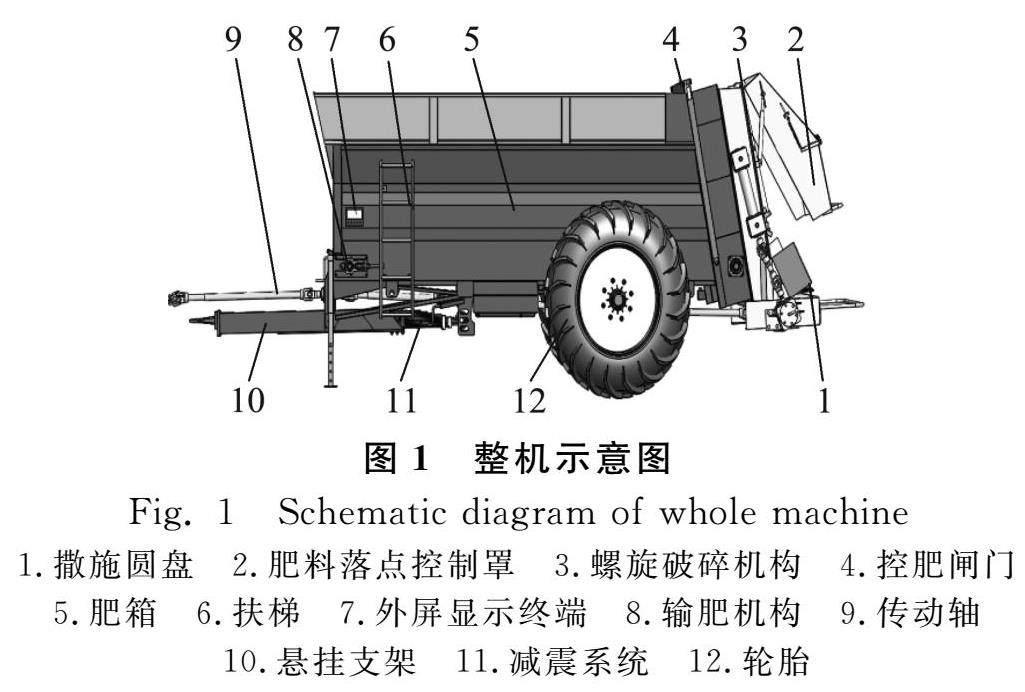
1 整机结构与工作原理
1.1 整机结构
施肥机主要包括输肥机构、控制终端、肥箱、螺旋破碎机构等[12],如图1所示。
1.撒施圆盘
2.肥料落点控制罩
3.螺旋破碎机构
4.控肥闸门
5.肥箱
6.扶梯
7.外屏顯示终端
8.输肥机构
9.传动轴
10.悬挂支架
11.减震系统
12.轮胎
1.2 工作原理
螺旋破碎机构和撒施圆盘采用机械传动,动力来自拖拉机PTO,转速稳定,可靠性好。输肥机构、控肥闸门、肥料落点控制罩采用液压驱动,工作范围可调,易实现变量控制。利用装载机将肥料装入施肥机,在控制终端输入施肥量,控肥闸门打开一定高度,肥料落点控制罩按实际所需打开一定角度,输肥机构选择挡位开始工作将肥料向后输送,螺旋破碎机构抛出的肥料撞击到肥料落点控制罩内部后被撞击破碎,下落到旋转的撒施圆盘后被抛出。在肥箱内部安装的摄像头可观察链板运行情况,在后方安装的摄像头实现撒施情况的实时监控。
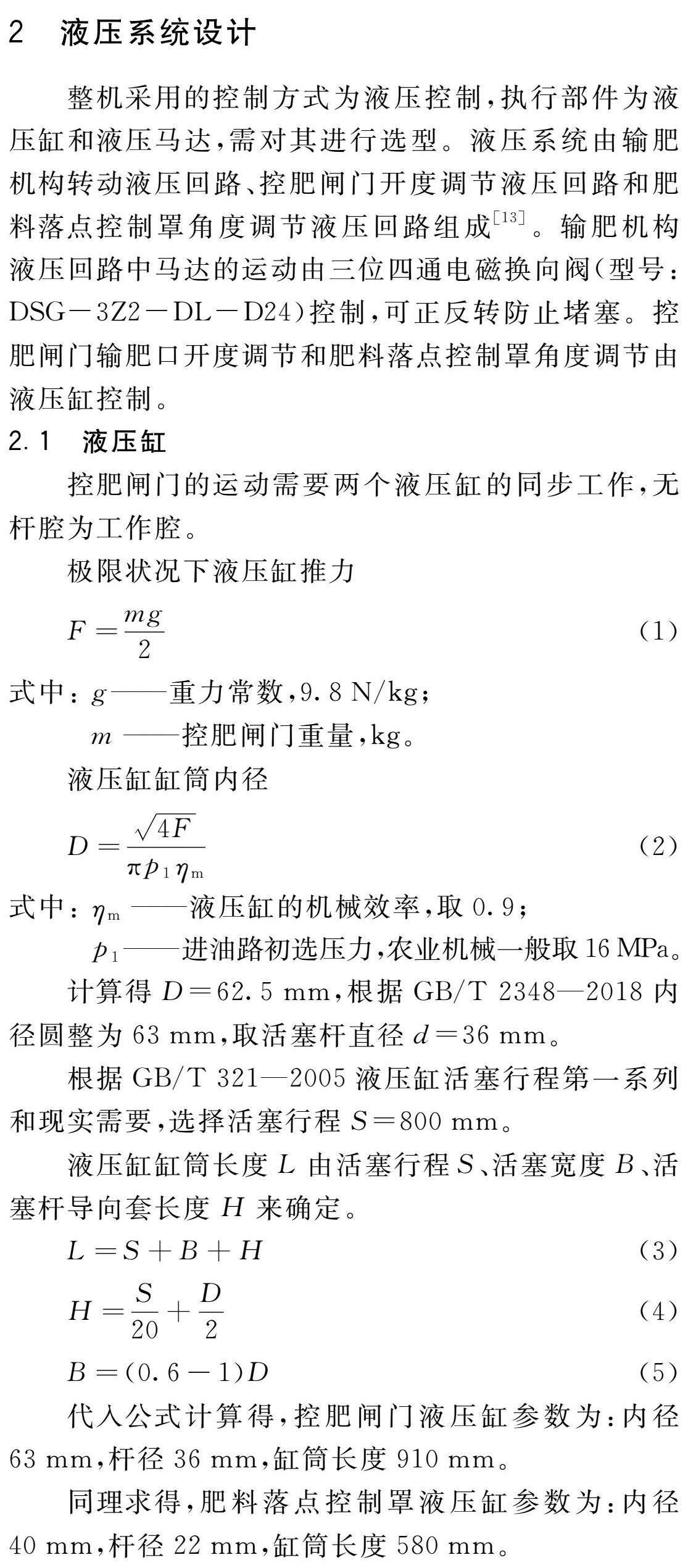
2 液压系统设计
整机采用的控制方式为液压控制,执行部件为液压缸和液压马达,需对其进行选型。液压系统由输肥机构转动液压回路、控肥闸门开度调节液压回路和肥料落点控制罩角度调节液压回路组成[13]。输肥机构液压回路中马达的运动由三位四通电磁换向阀(型号:DSG-3Z2-DL-D24)控制,可正反转防止堵塞。控肥闸门输肥口开度调节和肥料落点控制罩角度调节由液压缸控制。
2.1 液压缸
控肥闸门的运动需要两个液压缸的同步工作,无杆腔为工作腔。
极限状况下液压缸推力
F=mg2
(1)
式中:
g——重力常数,9.8N/kg;
m——控肥闸门重量,kg。
液压缸缸筒内径
D=4Fπp1ηm
(2)
式中:
ηm——液压缸的机械效率,取0.9;
p1——
进油路初选压力,农业机械一般取16MPa。
计算得D=62.5mm,根据GB/T 2348—2018内径圆整为63mm,取活塞杆直径d=36mm。
根据GB/T 321—2005液压缸活塞行程第一系列和现实需要,选择活塞行程S=800mm。
液压缸缸筒长度L由活塞行程S、活塞宽度B、活塞杆导向套长度H来确定。
L=S+B+H
(3)
H=S20+D2
(4)
B=(0.6-1)D
(5)
代入公式计算得,控肥闸门液压缸参数为:内径63mm,杆径36mm,缸筒长度910mm。
同理求得,肥料落点控制罩液压缸参数为:内径40mm,杆径22mm,缸筒长度580mm。
2.2 液压马达
不同农作物、不同地区对有机肥需求不同,滨州市无棣县土壤主要为滨海潮土、盐化潮土,土质差,土壤养分少,可适当加大有机肥的撒施量,肥料中的有机质能对土壤中的有害阴、阳离子起缓冲稀释作用,对植物的生长发育有促进作用[14]。初选大田有机肥的施肥量为4000~8000kg/hm2,肥料的堆积密度为700kg/m3,拖拉机以2km/h速度前进,幅宽4.5m,即有机肥撒施效率为5.7~11.5m3/(hm2·h)。控肥闸门开度取值一般为0.1~0.6m,肥箱宽度1.5m,求得输肥速度为0.7~8.9r/min。初选减速传动比为8,则液压马达转速范围为5.6~71.2r/min。
马达扭矩
T=W·R
(6)
W=Wf(m1f+m0f′)g
(7)
式中:
W——刮板输送装置总阻力,N;
R——驱动链轮节圆半径,mm;
Wf——附加阻力系数,取1.05;
f——物料与底板的摩擦系数,取0.6;
f′——刮板链条与底板的摩擦系数,取0.4;
m1——
满载时刮板输送装置上的物料质量,kg;
m0——刮板输送装置质量,kg。
减速器传动比为8,因此马达扭矩T为410.2N·m。
马达排量
V′=2πTp1η1=178.5mL/r
(8)
式中:
η1——马达容积效率,取0.9。
马达最大流量
qmax=nmax·V′η=14.1L/min
(9)
式中:
nmax——最高转速,r/min。
根据计算得到的转速范围、扭矩、排量和最大流量,查液压手册确定马达为径向柱塞马达,参数如表1所示。因为采用拖拉机型号为John Deere 1204,液压主泵最大流量为59.5L/min,满足使用要求。
3 数据采集与分析
3.1 采集数据
为了得到施肥量、施肥幅宽与输肥机构挡位、控肥闸门开度和肥料落点控制罩角度之间的关系式及施肥量和幅宽的对应方程,对基础数据进行了采集。
数据的采集过程在山东省某公司进行,地面平整,水泥质地,风速为2m/s,湿度为38.2%。所用肥料为发酵牛粪,容重为6.5g/cm3。利用料盘摆成7行13列的形状(沿车头前进方向),横向料盘间间距为200mm,纵向料盘间间距为1000mm。动力设备为John Deere1204拖拉机,速度为中速二挡,手动控制3个自变量的调整,速度稳定后匀速通过料盘。
3.2 数据分析
在此设计中,影响施肥量和施肥幅宽的因素中,有5个因素。为使机具破碎稳定及撒施均匀,螺旋破碎辊动力和撒施圆盘动力采用了拖拉机PTO,稳定工作情况视为定值,撒施圆盘转速为540r/min,螺旋辊转速为135r/min。自变量因素有3个,分别为输肥机构挡位(3挡、4挡、6挡、8挡)、控肥闸门开度(10cm、25cm、40cm、60cm)、肥料落点控制罩开启角度(0°、4.4°、10°、15°)。质量分布结果如图2所示。
(a) 横向质量分布
(b) 纵向质量分布
横向质量分布都符合高斯分布,拟合得到的正态函数Rsquare分布在0.8922~0.9681,当链板挡位最大、控肥闸门开度最大时正态函数值最小。在实际施肥时,施肥机中间料盘质量最大,越远离施肥机,料盘质量越小,且以施肥机中轴线对称分布,会通过两次叠加作业进行施肥,使得满足施肥要求。纵向分布系数反映的是在沿施肥机前进方向上,肥料的撒施均匀情况。数值越小,说明肥料的破碎率越高。同时说明施肥机工作平稳可靠,没有出现停顿等异常情况。纵向料盘质量分布上下变化范围小,说明撒施较均匀。
对于变异系数,控肥闸门开启程度越大,横向变异系数越高。随挡位、角度的增加,变化不大,控肥闸门开启程度是影响横向变异系数的主因。纵向变异系数范围为0.16~0.46,平均系数为0.26,小于国家标准,机具工作稳定性好。
各因素之间相关性如表2所示。
由表2可知,输肥机构挡位与纵向系数的相关系数检验的概率P值是0.25,肥量落点控制罩角度和幅宽的相关系数检验的概率P值是0.325,挡位、角度与其他变量之间不显著相关。控肥闸门开度与施肥量、幅宽、横向系数的显著性高,且在控制输肥机构挡位条件上,控肥闸门开度与三者之间的相关系数检验的概率P值是0.02、0.00、0.00;在控制肥料落点控制罩条件上,控肥闸门开度与三者之间的相关系数检验的概率P值是0.01、0.00、0.00;在输肥机构挡位和肥料落点控制罩都控制条件上,相关系数检验的概率P值是0.02、0.00、0.00,说明控肥闸门开度在各自变量中是主要影响因子;肥量与幅宽的显著性在0.01水平显著;肥量与横向系数的概率P值是0.017,在0.05水平显著。幅宽与横向系数也具有极强的线性关系。影响施肥量和幅宽的主要因素是控肥闸门的开启程度,输肥机构挡位和肥料落点控制罩角度为次要影响。
施肥量Y1和各因素关系如式(10)所示。
Y1=
34.592 12X1+32.533X2+27.778 89X3+
2 618.548 18
(10)
幅宽Y2和各因素关系如式(11)所示。
Y2=
0.033 7X1+0.047 92X2-0.007 31X3+
3.929 78
(11)
施肥量和幅宽关系如式(12)所示。
Y1=489.300 3Y2+1 386.3
(12)
式(10)~式(12)的F值分别为6.8、18.2、9.7,概率P值分别是0.008 9、0.000 2、0.008 8。
利用Matlab对式(10)~式(12)模拟时,位数太多,无数据输出,将公式修正为
Y1=34.6X1+32.5X2+37.8X3+2 618.5
(13)
Y2=0.034X1+0.048X2-0.007X3+3.930
(14)
Y1=489.3Y2+1 386.4
(15)
式中:
X1——输肥机构挡位;
X2——控肥闸门开度,cm;
X3——肥料落点控制罩角度,(°)。
4 控制系统设计
施肥机控制终端系统由嵌入式作业控制终端(FPGA芯片)、触摸屏、数据采集模块、位移传感器、转速传感器、角度传感器、开关控制模块、液压电磁阀及监控摄像头组成,实现不同施肥量、不同幅宽的调整及实时监控[15]。控制系统方案如图3所示。
显示屏为嵌入式一体化控制屏,芯片型号为XC7A35,存储芯片为128M×16bit,配置S25FL032flash,UART芯片为PL2303,可满足使用要求。数据采集模块采用DAQM-4206,可实现工业级8通道模拟量采集,内置看门狗,保证施肥过程中信号采集的稳定性。继电器控制板具有4路NPN型光电输入和4路继电器输出,电源、通讯均隔离,具有超强抗干扰能力。
输肥机构挡位的检测采用CZ716传感器,设置成上下限报警输出,用于链板拥堵报警。
肥门开度的检测利用德格斯的DL系列拉线位移传感器,安装在控肥闸门液压缸活塞杆,活塞杆的移动带动不锈钢绳长度的变化,经内部转换即采集到实时位移数据。
肥料落点控制罩开合角度的检测采用HVS120T双轴数字输出型倾角传感器,量程±90°,安装在肥料落点控制罩侧板并置零,此时传感器内部加速度传感器灵敏轴与重力垂直轴重合,重力垂直轴会保持不变,当肥料落點控制罩转动时,加速度传感器灵敏轴随之转动,两轴之间便形成了夹角,即控制罩开启角度。
5 驗证试验
施肥机验证试验在山东省某公司进行,采用了3组方案进行验证,方案1参数:输肥机构挡位为6、控肥闸门升起高度为25 cm、肥料落点控制罩开启角度为13°;方案2参数:输肥机构挡位为8、控肥闸门升起高度为75 cm、肥料落点控制罩开启角度24°;方案3参数:输肥机构挡位为2、控肥闸门升起高度107 cm、肥料落点控制罩开启角度66°。试验结果如表3所示,结果表明,在控制系统中输入目标施肥量后,输肥机构挡位、控肥闸门升起高度和肥料落点控制罩角度能达到所计算量,但施肥量和幅宽与目标量存在误差,但都在目标量左右浮动,施肥量误差在2.58%,幅宽误差在3.53%,造成误差的原因在于有机肥存在部分较大的肥块,无法顺利通过控肥闸门或者一大块突然通过,造成施肥量和幅宽与目标量的误差;地块平整度差,容易颠簸,造成输肥不均匀。
6 结论
1) 施肥机实现了施肥量和幅宽的变量控制,得到了施肥量、幅宽与影响因素的关系式及相关性,控肥闸门开启程度是主要因素,输肥机构挡位和肥料落点控制罩角度为次要影响。
2) 横向质量分布拟合得到的正态函数分布在0.8922~0.9681,控肥闸门开启程度是影响横向变异系数的主因。纵向质量分布上下变化范围小,变异系数为0.26,小于国家标准。
3) 验证试验结果表明此控制系统简单可靠,输肥机构挡位、控肥闸门升起高度和肥料落点控制罩角度能达到所需量,施肥量与幅宽实际量与目标量存在误差,施肥量平均误差在2.58%,幅宽平均误差在3.53%,能应用于实际工作。
参 考 文 献
[1]金书秦, 周芳, 沈贵银. 农业发展与面源污染治理双重目标下的化肥减量路径探析[J]. 环境保护, 2015, 43(8): 50-53.
Jin Shuqin, Zhou Fang, Shen Guiyin. Feasible routes for reducing chemical fertilizer use with dual goals of agricultural development and nonpoint source pollution prevention [J]. Environmental Protection, 2015, 43(8): 50-53.
[2]安晓飞, 王晓鸥, 付卫强, 等. 四要素变量施肥机肥箱施肥量控制算法设计与试验[J]. 农业机械学报, 2018, 49(S1): 149-154.
An Xiaofei, Wang Xiaoou, Fu Weiqiang, et al. Design and experiment of fertilizer amount control algorithm in four factors variable rate fertilization system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 149-154.
[3]黎小清, 丁华平, 杨春霞, 等. 基于WebGIS的东风农场橡胶树施肥信息管理系统的设计与实现[J]. 热带农业科技, 2014, 37(4): 1-5.
Li Xiaoqing, Ding Huaping, Yang Chunxia, et al. Design and implementation of rubber tree fertilization information management system of Dongfeng statefarm based on WebGIS [J]. Tropical Agricultural Science & Technology, 2014, 37(4): 1-5.
[4]孟志军, 赵春江, 付卫强, 等. 变量施肥处方图识别与位置滞后修正方法[J]. 农业机械学报, 2011, 42(7): 204-209.
Meng Zhijun, Zhao Chunjiang, Fu Weiqiang, et al. Prescription map identification and position lag calibration method for variable rate application of fertilizer [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(7): 204-209.
[5]Navid H, Ebrahimian S, Gassemzadeh H R, et al. Laboratory evaluation of seed metering device using image processing method [J]. Australian Journal of Agricultural Engineering, 2011(2): 1-4.
[6]Bouroubi Y, Tremblay N, Vogneault P, et al. Fuzzy logic approach for spatially variable nitrogen fertilization of corn based on soil, crop and precipitation information [J]. Computational Science and Its Application, 2011, 6782: 356-368.
[7]Yazgi A, Degirmencioglu A. Optimisation of the seed spacing uniformity performance of a vacuumtype precision seeder using response surface methodology [J]. Biosystems Engineering, 2007, 97(3): 347-356.
[8]金鑫, 李倩文, 苑严伟, 等. 2BFJ-24型小麦精量播种变量施肥机设计与试验[J]. 农业机械学报, 2018, 49(5): 84-92.
Jin Xin, Li Qianwen, Yuan Yanwei, et al. Design and test of 2BFJ-24 type variable fertilizer and wheat precision seed sowing machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 84-92.
[9]冯慧敏, 高娜娜, 孟志军, 等. 基于自动导航的小麦精准对行深施追肥机设计与试验[J]. 农业机械学报, 2018, 49(4): 60-67.
Feng Huimin, Gao Nana, Meng Zhijun, et al. Design and experiment of deep fertilizer applicator based on autonomous navigation for precise row following [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(4): 60-67.
[10]余洪鋒, 丁永前, 刘海涛, 等. 小田块变量施肥系统优化设计与应用[J]. 农业工程学报, 2018, 34(3): 35-41.
Yu Hongfeng, Ding Yongqian, Liu Haitao, et al. Optimization design and application of variable rate fertilization system for small scaled fields [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(3): 35-41.
[11]宿宁. 精准农业变量施肥控制技术研究[D]. 合肥: 中国科学技术大学, 2016.
Su Ning. Research on variable rate fertilization control technology in precision agriculture [D]. Hefei: University of Science and Technology of China, 2016.
[12]孙冬霞, 樊平, 王鹏军, 等. 有机肥施肥机关键部件的有限元分析及试验[J]. 中国农机化学报, 2020, 41(7):9-15.
Sun Dongxia, Fan Ping, Wang Pengjun, et al. Finite element analysis and test of key parts of organic fertilizer applicator [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(7): 9-15.
[13]王向阳, 吴雪璐, 刘晓丽, 等. 果园有机肥开沟施肥机液压系统设计与仿真[J]. 中国农机化学报, 2018, 39(11): 22-27, 33.
Wang Xiangyang, Wu Xuelu, Liu Xiaoli, et al. Design and simulation of hydraulic system for the orchard organic fertilizer ditching and fertilizing machine [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(11): 22-27, 33.
[14]刘枫, 王咏香. 测土配方施肥关键技术: 彩插版[M]. 北京: 中国三峡出版社, 2006.
[15]赵常, 耿爱军, 张姬, 等. 水肥药精准管理技术研究现状与发展趋势[J]. 中国农机化学报, 2018, 39(11):28-33.
Zhao Chang, Geng Aijun, Zhang Ji, et al. Research status and development trend of precision management technology of water and fertilizer [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(11): 28-33.
猜你喜欢
农业工程学报(2022年1期)2022-03-25
今日农业(2020年19期)2020-12-14
中国化肥信息(2020年9期)2020-03-29
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
文苑(2018年21期)2018-11-09
中国化肥信息(2017年3期)2017-12-23
中国化肥信息(2017年7期)2017-12-13
江苏农机化(2015年6期)2015-12-07
