
并联式六维加速度感知机构动力学模型的失效情况研究
2024-05-20 08:29张显著尤晶晶张缘为史浩飞
林业机械与木工设备 2024年3期
张显著, 尤晶晶, 张缘为, 史浩飞
(南京林业大学机械电子工程学院,江苏 南京 210037)
随着科学技术的不断发展,以及人们认识客观世界的要求不断提高,对三维空间内物体的六维运动进行探测显得越来越重要[1-2]。例如,为实现空间机器人末端执行器的动力学控制,必须实时获取机器人本体完整的运动信息。此外,在惯性导航、人工智能、太空对接等领域都涉及到载体的空间刚体运动[3]。一般只有测量加速度时可以不从外界获取信号,也无需向外界传递信号。由此,产生了“六维加速度传感器”的概念,即一种能够同时测量空间三维线加速度和三维角加速度的惯性测量仪器[4]。六维加速度传感器的测量性能主要由其感知机构的操作性能决定[5-6]。
六维加速度感知原理的关键在于建立支链力与基座加速度之间的映射关系,这一关系称为反向动力学方程,又称解耦算法。研究动力学常用的方法有Newton-Euler法、Lagrange法、Kane动力学法等等。一般来说,Lagrange法的运算量最大[7],Newton-Euler法次之[8],Kane动力学法的运算量最小、效率最高,且在处理多闭环运动链机构的动力学方面具有一定的优势[9]。但是,动力学方程并不是普遍适用于所有情况。针对机构动力学方程失效原因并不明朗的问题,挖掘、分析了动力学方程失效的情况,并对所提出的类型进行了仿真验证。
1 感知机构的工作机理
并联式六维加速度感知机构的原理样机如图1所示,主要包括1个基座,1个立方体状质量块和连接两者的12条完全相同的支链。其中,质量块是半边长为n的立方体;支链的长度为L;基座是半边长为(n+L)的立方空心壳体。任意两条支链呈平行或垂直的相对几何关系,且每条支链由一根圆柱状压电陶瓷(图1中用线段表示)和两个圆弧状弹性球铰链串联而成。其中,实心圆和空心圆分别代表复合球铰链和一般球铰链。
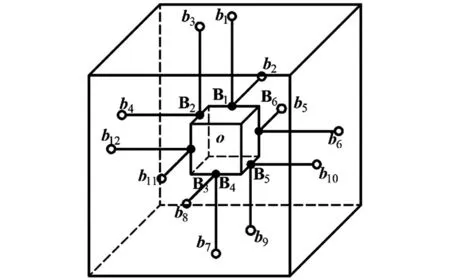
图1 并联式六维加速度感知机构的原理样机
实际工作时,基座与待测物体固连在一起,即基座的加速度和待测对象的加速度(包括大小和方向)完全相同。在惯性力和惯性力矩的作用下,质量块压缩或拉伸各支链上的压电陶瓷。由于正压电效应,压电陶瓷的两个极化面上会分别产生正负电荷。压电电荷通过电荷放大器、数据采集卡等信号设备的处理后被计算机的串/并口接收。因此,该类系统的输入量为基座的六维加速度激励,输出量为支链的轴向力(或正负电荷)。
2 动力学方程失效的几种情况
2.1 奇异位形
由于待测量的维数为6,且线加速度和角加速度之间存在不可公度性,六维加速度传感器的量程性能至今尚无标准、规范的计算公式。但是,量程的基本内涵是明朗的,即系统能够持续、精确、稳定感知到的六维加速度的区间集合。根据机构学理论可知,当机构位于或接近于某些特殊位形时,其运动和力传递/约束性能变得很差,即机构发生了奇异。比如,图2所示的两种“12-8”式Stewart型并联机构分别处于一般线性丛奇异和Hunt奇异(从属于第一类特殊线性丛奇异)。
计算它们的雅可比矩阵,结果如式(1)、式(2)所示。经验算,它们的秩均为5。
(1)
(2)
2.2 基频共振
感知机构系统在正常情况下,周期性的外部加速度输入会引起周期性的轴向力输出。根据机械振动理论,当感知机构的工作频率达到基频的某一范围时,其输出信号发生相位失真或幅值失真,此时感知机构出现共振现象,不能正常工作。为防止感知机构在工作时处于共振区,在设计感知机构时要确定其最大工作频率。最大工作频率等于共振区域中的最小频率或工作区域中的最大频率;工作频率必须保持小于最大工作频率,以确保测量精度。
对于一维加速度计而言,工作频率的下限由前置电荷放大器的下限截止频率决定,一般可低至0.3 Hz;工作频率的上限一般取其基频的1/5~1/3,以避免感知机构发生共振从而影响正常检测。对于低维运动传感器,对它的研究主要侧重于工作频率与传感器结构参数之间的关系。对于六维加速度感知机构,其最小工作频率由电荷调理仪器的性能决定,而最大工作频率的界定尚未解决。目前,六维加速度感知机构的固有频率等特性已得到了深入研究,因此在探究其最大工作频率时,可以先推导固有频率与结构参数之间的关系,再通过分析最大工作频率与固有频率之间的关系,间接得到结构参数与最大工作频率的关系。
2.3 支链故障
六维加速度感知机构在复杂的工作环境中,受周边环境的干扰及振动影响,可能出现输出信号不稳定、短路等状况,导致支链发生故障。此时,动力学方程的解算发生严重的错误。式(3)所示为Stewart型并联机构的6个支链力协调方程[10]。
(3)
通过将相邻协调方程进行“加”或“减”的运算可以消去一个支链力,故可得它们之间的协调闭链关系如图3所示。
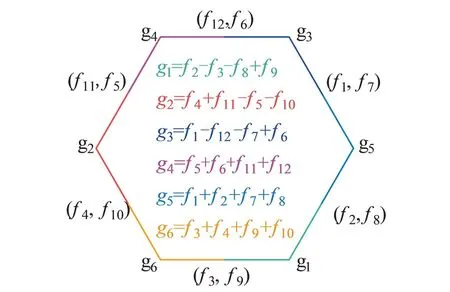
图3 正六边形协调闭链
双支链故障一共包括66种情况。从两个故障支链力在协调闭链上的相对位置来看,这66种情况可以划分成四类:
(1)位于同1条边线上,一共包括6种组合,如f6和f12组合;
(2)位于2条相邻的边线上,一共包括24种组合,如f6和f1组合;
(3)位于2条间隔1条边(或间隔3条边)的边线上,一共包括24种组合,如f6和f2组合;
(4)位于2条相对(或间隔2条边)的边线上,一共包括12种组合,如f6和f9组合。
三支链故障一共包括220种情况。从三个故障支链力在协调闭链上的相对位置来看,这220种情况可以划分成五类:
(1)位于2条相邻的边线上,一共包括24种组合,如(f1,f6,f12)组合;
(2)位于协调闭链的2条间隔1条边或2条边的边线上,一共包括36种组合,如(f2,f6,f12)组合;
(3)位于3条连续的边线上,一共包括48种组合,如(f2,f1,f6)组合;
(4)位于3条边线上(两条连续),一共包括96种组合,如(f1,f9,f6)组合;
(5)位于3条不连续边线上,一共包括16种组合,如(f6,f8,f10)组合。
3 虚拟实验
为衡量感知机构的测量精度,定义综合相对误差来评估反向动力学方程的求解精度,其表达式为

利用ADAMS对“12-8a”、“12-8b”型感知机构进行仿真,并基于建立的动力学方程进行求解。最终得到“12-8a”、“12-8b”型感知机构的综合相对误差,如表1所示。

表1 构型算法验证
结果显示,这样的拓扑构型显然不能充当六维加速度感知机构。因此,若不考虑零部件的材料属性和加工工艺,则感知机构的奇异性能就直接决定了六维加速度传感器的量程性能。具体表现为感知机构的奇异位形越少且工作位形距离奇异位形越“远”,则六维加速度传感器的优质工作空间(即量程)就越大。
4 结论
以三种典型的并联式六维加速度感知机构动力学方程失效情况为例,通过计算机构雅可比矩阵的秩,挖掘出动力学方程失效的一种原因。分析了机构的工作频率与机构的基频,得到动力学方程失效的另一种情况。理论推导出支链的杆长表达式。剖析了机构支链出现故障时动力学方程的实时性,总结出动力学方程失效的第三种情况。所揭示的动力学方程失效的机理为提升多维传感系统的动力学解耦精度奠定了理论基础。
猜你喜欢
太原师范学院学报(自然科学版)(2022年3期)2022-10-14
振动与冲击(2022年11期)2022-06-17
发明与创新·小学生(2018年3期)2018-04-17
中文信息(2016年11期)2017-02-11
河北工业大学学报(2016年1期)2017-01-06
现代电子技术(2015年22期)2015-12-02
大众科技(2015年11期)2015-11-24
组合机床与自动化加工技术(2015年1期)2015-11-03
数学大王·低年级(2015年4期)2015-07-10
电源技术(2015年9期)2015-06-05
