面向重载的叉车式AGV货叉结构有限元分析
2024-05-19 09:47:09李开颜刘强
科技风 2024年11期
李开颜 刘强

摘 要:近年来,随着仓储物流行业的迅速发展,叉车式AGV成为研究人员所关注的重点研究对象之一。面向重载的叉车式AGV的结构稳定性是产品研发关键,本文通过有限元法对其关键件货叉结构进行了静力学和动力学分析。分析结果表明:在满载工况下,货叉结构的强度、刚度和模态分析均满足设计要求,分析结果能在产品设计阶段为避开结构薄弱位置提供一定的参考价值,为货叉结构的开发设计提供参考和依据。
关键词:叉车式AGV;叉车货叉;有限元;结构分析
Abstract:In recent years,with the rapid development of warehousing and logistics industry,forklift AGV has become one of the key research objects of researchers.The structural stability of overloading forklift AGV is the key to product development.The statics and dynamic analysis of its fork structure are analyzed by finite element method.The analysis results show that under the full load condition,the strength,stiffness and mode analysis of the fork structure meet the design requirements,and the analysis results can provide certain reference value for avoiding the weak structure in the product design stage,and provide reference and basis for the development and design of the fork structure.
Keywords:forklift AGV;forklift fork;finite element;structure analysis
叉车作为搬运货物的工具,在仓储物流中发挥着至关重要的作用[1]。传统的叉车在工作时主要依赖于人工介入操控,无法满足现代企业高效、精准和安全的生产需求[2]。叉车式AGV(Automated Guided Vehicle)是一种具有自主导航功能、无需人工操控的搬运机器人,能按预先设定的导引线路进行货物的运输和转移[3]。货叉是叉车完成叉举工作的主要部件[4],是直接承載货物的受力结构,且安装在门架上导致其又间接承受来自路面反馈的各种力和振动,其强度和刚度性能直接影响叉车的可靠性和稳定性。因此,本文采用有限元法对货叉结构进行结构稳定性的静力学分析和模态分析,为进一步优化结构提供方案和意见。
1 货叉结构的组成与工作原理
货叉结构包括货叉和货叉架(滑架)。叉车前部一般装有两个L型货叉,货叉由水平段和垂直段两个部分组成。水平段负责承载货物,为了保证货物重心稳定,水平段上表面必须是水平的。下表面是倾斜的且前端较窄,方便插入托盘底端取货。垂直段是支撑部分,与叉架连接。货叉架主要用于固定货叉及其他配件,又叫做滑架。货叉安装在叉架上,在工作时货叉直接承载货物,与货叉架刚性连接,在起升链条带动下沿着门架进行上升或下降,它们承受货物、货叉和自重。货叉架通过铰链与起升油缸连接在一起,靠油缸的升降来提升物料。叉车货叉按其安装方式可分为沟槽式货叉和环眼式货叉,
沟槽式货叉通过两个楔形槽与货叉架固定,环眼式货叉通过叉柄上的圆孔与货叉架上的固定轴相连,使用过程中货叉可绕固定轴转动[5]。小吨位叉车多采用沟槽式货叉,而大吨位叉车以环眼式货叉为主。本文研究的对象为小吨位叉车,因此选择沟槽式货叉进行分析。
2 货叉结构有限元分析
有限元法的核心思想就是在离散化方法的应用下,对数学模型中难以求解的问题转变成代数方程来分析求解[6]。在进行有限元分析之前,首先需要建立叉车货叉结构的有限元模型。本文基于实际工作情况,对叉车货叉结构进行分析计算来验证货叉结构的力学性能。
2.1 模型建立
本文研究的货叉结构是由货叉和货叉架组成,其中货叉架包括若干零部件。由于其中大部分的零部件对本次研究模型的影响小,因此若将全部部件进行仿真分析,势必出现非常大的计算资源的浪费。为了减小计算量,首先对叉车货叉模型进行简化。
2.2 材料属性
根据前面对无人叉车货叉结构和工作原理的探讨,货叉工作时要承受较大的载荷,因此对其强度性能要求较高,一般由合金鋼45Cr锻造而成。货叉架采用Q235钢板厚钢板焊接而成。货叉结构不同部分的材料是不相同的。
2.3 网格划分
有限元分析计算时,作用在研究对象上的载荷和约束均以单元和节点实现计算的,因此针对模型的网格划分是进行有限元计算和分析的基础[7]。对货叉结构模型进行网格划分将直接影响分析计算的精度。采用自动划分方法,定义单元大小8mm网格精度划分网格,得到网格数为35648个,节点数为88975个。
2.4 货叉结构的静力学分析
根据叉车在实际工作运行中的实际环境,首先需要对货叉结构进行静力学分析。根据实际模型要求,对货叉结构进行受力分析,进一步确定求解的精度。对货叉结构模型进行离散化的网格划分后,能将后续的具体分析问题转化为研究具体的单个网格单元。通过分析每个单元之间的节点变形以及节点力的关系来确定单元之间的相互联系。然后通过变形和应力之间的相互联系,利用虚变形原理来确立单元变形和单元力的联系,获取每一个单元的刚度矩阵。其单元特性方程如下:
{F}=[K]e{q}e(1)
上述式中:e为单元编号,{F}为单元节点矩阵,[K]e为单元刚度矩阵,{q}e为单元节点变形。
在完成对式子的总体刚度合并,将各个单元间的内力合成并通过外力进行表示,完成移置载荷向节点载荷的转化,得到如下方程:
[R]=[K][q](2)
上述式中:[R]为载荷列矩阵,[K]为总体刚度矩阵,[q]为节点变形列矩阵。
在完成上述式子的转化后,根据模型施加载荷和相对应的边界约束,可求得最终的变形量和应力值[8]。
为研究叉车货叉在极端工作条件下的数据,对货叉结构进行静力分析。货叉通过上挂钩挂接在货叉架上横梁上,下挂钩同时紧扣在货叉架下横梁上。分析时需要根据工作情况进行简化,货叉挂钩上表面和内表面为全约束,下表面与货叉架下横梁接触垂直面为Z方向零位移约束。
考虑无人搬运叉车在满载工况下的受力情况,对货叉结构施加力约束。货叉水平段表面承受载荷,单侧货叉水平段面积为56826.94mm2。对货叉水平段上表面施加等效面载荷:
P=FS=980056826.94=0.172MPa(3)
其中,F为模拟叉车满载货量时的载荷情况,货物总载荷为2t,方向为负Z向。
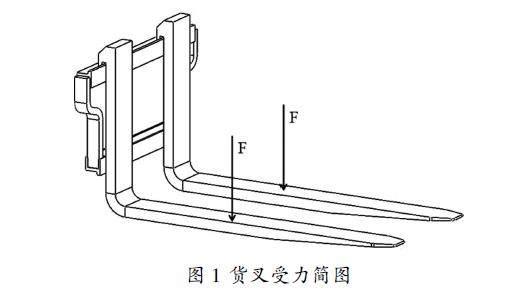
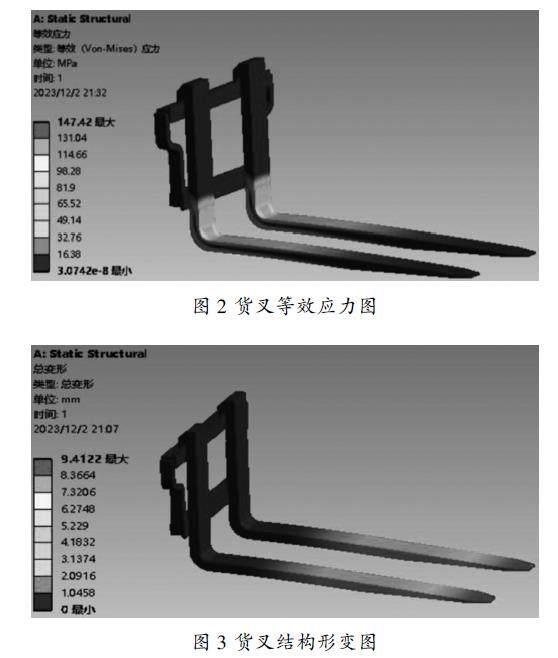
根据图1货叉结构受力简图对货叉进行受力分析,根据上节对货叉添加材料为合金钢45Cr,分析得到如图2货叉等效应力图和图3货叉结构形变图。
对货叉结构进行静力分析,从图2可以看出,货叉根部出现应力集中现象。其中,该区域应力值最大为147.42MPa。由表1可知,货叉的材料屈服强度为835MPa,根据计算货叉安全系数为3.6,为147.42MPa<8353.6=231.94MPa,货叉强度符合安全系数设计要求。
从图3可以看出,在货叉水平段上,其变形量由货叉根部向叉尖逐渐增大,叉尖部分在Z方向的负向上变形量最大,最大变形值为9.4122mm
2.5 货叉结构的动力学分析
货叉结构作为叉车的主要工作结构,其最终的振源由多个来源组成,如内部因素和外部因素。内部因素一般指叉车内部的传动和动力设备带来的激励。外部的因素有叉车车速随时变化和方向的调整改变产生的振动。因此,当内部因素带来的振动达到或接近外部振动时,货叉结构甚至车身将产生共振现象,该现象将损坏叉车的整体结构。所以在设计过程中,应尽量避免此现象带来的疲劳破坏和强度破坏。在实际工作中,货叉结构受到来自货物动载荷引起的振动。由于门架系统和叉车前桥连接,货叉结构也会受到来自门架系统振动引起的振动。为了防止叉车工作中发生共振,对货叉结构进行振动分析也是十分必要的。
每一阶模态对应的振动特性都可以通过模态分析得到,这些模态的参数是通过实验或者计算得到的,这些计算或实验的过程就被称为模态分析[9]。模态分析包括有预应力模态分析和无预应力模态分析,预应力模态分析考虑到了工作载荷所产生的应力对系统整体结构强度和刚度的影响,更为接近实际工况[10]。
在有限元分析前需要对货叉进行简化处理,考虑叉车工作中承受门架系统和货物双重载荷,对货叉添加约束及载荷。分析得到如表2货叉结构前20阶振动频率和图4货叉结构前六阶振型。
一阶振型(24.008Hz):振型为纯弯曲,两货叉在Y方向上异向往返摆动,振幅由货叉根部向货叉叉尖逐渐增大,叉尖变形最大,最大相对位移变形值为8.337mm。
二阶振型(31.277Hz):振型为纯弯曲,两货叉在Z方向上异向往返摆动,振幅由货叉叉尖向货叉根部逐渐减少,最大相对位移变形量为7.508mm。
三阶振型(62.307Hz):振型为纯弯曲,两货叉在Y方向上同向往返摆动,货叉架在X方向上同向往复摆动,振幅由货叉根部向货叉叉尖和货叉架顶部逐渐增加,最大位移发生在货叉叉尖,最大变形量为7.124mm。
四阶振型(89.675Hz):振型为纯扭转,两货叉绕Y方向来回扭动,最大位移变形量发生在货叉叉尖,最大值为5.959mm。
五阶振型(105.24Hz):振型为纯弯曲,两货叉在Y方向上异向往返摆动,货叉架在X方向上异向往复摆动,振幅最大发生在货叉叉尖和货叉架顶部,最大值为7.313mm。
六阶振型(162.8Hz):振型为弯扭组合,两货叉在Y方向上同向往返摆动,在货叉叉尖产生较大变形,变形最大为13.805mm。
从上图可以看出,货叉在Z方向上有纯弯曲振动,也有绕Y转动的振动和弯扭组合振动。在前六阶振型中,纯弯曲振型占大多数。
一般情况下,路面激励的频率属于较低的范围,即时间频率在0.5~20Hz之间[11]。在以货叉结构为研究对象时,视与其连接的门架系统、车身等其他结构为刚体。因此结合以上对货叉结构模态分析可知,货叉结构和路面激励频率不相等,货叉结构在正常工作时不会发生共振[12],因此满足设计要求。
结语
本文以叉车式AGV的货叉结构为研究对象,对货叉结构的强度和刚度进行了有限元分析计算。通过静力学和动力学的研究分析表明:在静力学分析时,货叉的强度满足叉车的设计要求。在满载工况下,货叉叉尖处在Z方向的负向上变形量最大。因此在实际插取货物时,应使货物尽量靠近货叉根部,确保货物的稳定性;在动力学分析时,通过模态分析发现,货叉结构不会与路面产生共振现象,货叉在工作时能平稳运行。同时对货叉结构的前六阶振型图分析发现货叉结构上存在的不足,可以通过增大货叉架与门架系统的连接齿条齿距,减小来自路面的激振频率,进一步提高货叉结构存取货时的准确性和平稳性。
参考文献:
[1]程樂平,李欢.智能仓储物流中机器人技术的应用与发展[J].信息系统工程,2023(07):4346.
[2]张佩佩,张靖之,左权.AGV小车在轨道车辆架修中的研究与应用[J].设备管理与维修,2023(15):2627.
[3]陈媛媛,陈菁,张守兴.AGV导航技术研究现状的探讨[J].机械管理开发,2020,35(05):249250.
[4]杨左文.叉车货叉架结构强度分析[J].物流技术与应用,2022,27(07):134138.
[5]刘丹,田志成,刘志勇.叉车货叉行业现状分析[J].工程机械与维修,2019(04):3032.
[6]王美娥.有限元分析在结构设计中的应用[J].航天控制,2004(01):8589.
[7]王瑞,陈海霞,王广峰.ANSYS有限元网格划分浅析[J].天津工业大学学报,2002(04):811.
[8]王青,徐港.ANSYS梁单元的理论基础及其选用方法[J].三峡大学学报(自然科学版),2005(04):336340.
[9]梁君,赵登峰.模态分析方法综述[J].现代制造工程,2006(08):139141.
[10]何宁,张德龙,张庆华.考虑预应力的鼓式制动器制动鼓模态分析[J].农业装备与车辆工程,2023,61(02):6365.
[11]赵鸿铎,梁颖慧.基于有限元分析的沥青路面自振频率研究[J].交通信息与安全,2012,30(02):1015.
[12]孙永吉.三级直线差动式货叉机构的模态分析[J].兰州工业高等专科学校学报,2011,18(03):4851.
作者简介:李开颜(1970— ),男,汉族,山西临汾人,本科,高级工程师,研究方向:铁道车辆检修与运用。
猜你喜欢
上海节能(2020年3期)2020-04-13 13:16:16
天津医科大学学报(2019年6期)2019-08-13 07:04:32
智富时代(2016年12期)2016-12-01 14:57:24
文艺生活·中旬刊(2016年10期)2016-11-04 04:44:49
戏剧之家(2016年10期)2016-06-18 12:31:11
科技视界(2016年13期)2016-06-13 08:03:44
科技视界(2016年5期)2016-02-22 13:27:55
人民论坛(2016年3期)2016-01-22 12:02:12
汽车实用技术(2015年8期)2015-12-26 09:01:00
机械工程师(2015年10期)2015-02-02 01:14:03