基于扰动观测器的四旋翼无人机自适应姿态控制方法
2024-05-15 13:21李胜铭邱世豪吕宗阳吴玉虎
实验室研究与探索 2024年3期
李胜铭,邱世豪,吕宗阳,吴玉虎
(大连理工大学创新创业学院,辽宁大连 116024)
0 引言
随着无人机控制技术的不断成熟,无人机运输成了一种备受关注的新型运输方式。其中,四旋翼无人机由于其能够垂直升降以及具有高机动性、良好的灵敏度等优点,在救援[1]、测绘[2]、工业检查[3]等领域得到了广泛的应用。因此,四旋翼无人机运输也成了无人机运输[4]的主流选择。
提出了一种自适应控制方法,解决由四旋翼无人机所携带的未知质量载荷所造成的影响。介绍了一个四旋翼无人机运输未知质量载荷的动力学模型,然后提出了一种基于上述四旋翼无人机动力学模型的自适应姿态控制器。使用扰动观测器估计未知质量载荷带来的干扰,并使用Lyapunov理论验证了该控制器的稳定性。最后,在一个已有的四旋翼无人机平台上进行了飞行实验,证明了所提解决方案的实用性和有效性。
1 四旋翼无人机动力学模型建立
为了描述四旋翼无人机在空间中的运动,建立相应的动力学方程,涉及2 个坐标系:惯性坐标系W=[XwYwZw],机体坐标系B=[XbYbZb]。坐标系建立如图1 所示。ωi(i=1,2,3,4)为每个电动机的转速。欧拉角向量η=[φ θ ψ]T,其中φ 为滚转角,θ为俯仰角,ψ 为偏航角。η 满足如下边界限制:φ,θ∈(-π/8,π/8),ψ∈(-π,π)。
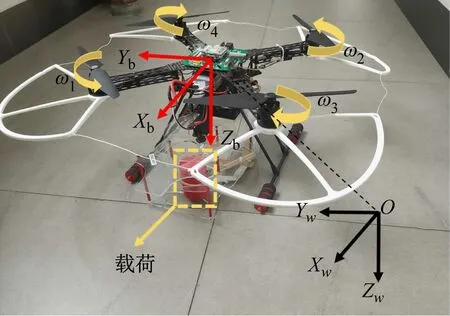
图1 四旋翼坐标系示意图
参考文献[12]中使用拉格朗日法建立动力学模型,并考虑载荷干扰扭矩τd,则四旋翼无人机的动力学模型为
惯性矩阵Ju可以表示为
式中,Jxx、Jyy、Jzz表示四旋翼无人机沿其主轴的惯性矩。由于四旋翼无人机基本上围绕机体坐标系的3 个主轴对称,因此Jxy=Jxz=Jyz=0。
为了保证最终实验结果的准确性,对实验平台的电调和电动机进行数据采集。测试数据如图2 所示。由图2 可见,电动机旋转产生的升力和力矩分别与电动机控制信号成正线性相关关系。因此,每个电动机上受到的升力fi(i=1,2,3,4)和力矩τi分别为:
5月4日,全国水利财务工作会议在北京召开。水利部部长陈雷出席会议并作重要讲话(本期“特别关注”全文刊发)。中纪委驻部纪检组组长董力出席并讲话。水利部副部长周英主持会议并作会议总结。
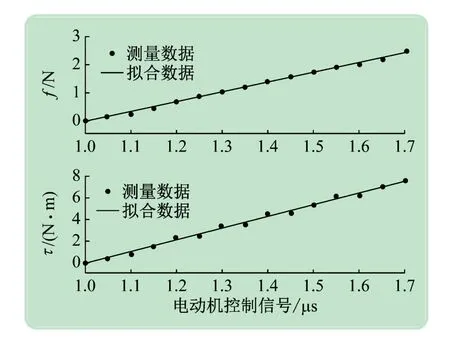
图2 电动机升力和力矩拟合曲线
式中:ct和cq分别表示升力系数和力矩系数;δi表示电动机控制信号。因此,四旋翼上受到的升力和力矩可以用矩阵的形式表示,即
式中:lr为从电动机的旋转轴到四旋翼无人机重心的距离;f为四旋翼无人机总升力,沿Zb轴正方向。
2 自适应姿态控制器设计
设计一种自适应控制器,用于解决未知质量载荷带来的干扰。此控制器对四旋翼无人机的姿态环进行控制,控制原理如图3 所示。对于实际控制系统,受模型不确定性、外界干扰等因素的影响,往往需要设计的控制器具有一定的鲁棒性。基于扰动观测器的控制框架能够有效消除上述因素所带来的干扰,故在控制方法中引入了扰动观测器来估计载荷带来的干扰扭矩,并将估计值传入自适应姿态控制算法以进行机身的姿态控制。
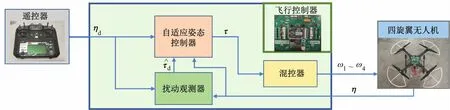
图3 四旋翼无人机载荷控制器原理图
引入姿态角向量的跟踪误差e1∈R3
式中,ηd表示期望姿态角。
根据Lyapunov定理,如果系统在e1=0 处为平衡状态,就选取正定Lyapunov函数,即
Lyapunov函数V1对时间求导,可得
为了满足Lyapunov条件,引入虚拟控制量φ使等式成立,令φ=K1e1+。这里K1=[KφKθKψ]∈R3为正定常数矩阵。代入式(6)可得
姿态角速度跟踪误差e2∈R3和干扰扭矩估计误差Δτd分别定义为:
这里将τd看作常值干扰,对式(9)求导可得
为了估计干扰值,设计扰动观测器为
定理期望姿态角ηd和期望姿态角速度都为零。如果控制扭矩τ如式(16)所示,误差e1和e2的零平衡点就都能局部渐近稳定。
证明根据Lyapunov 定理,构造Lyapunov 函数,可得
Lyapunov函数V2对时间求导,有
式中:I3为单位向量矩阵;K2为正定常数矩阵。将式(15)代入式(1)可得
式中,λ1、λ2、λ3分别为K1、K2、K3的最小特征值。因此,姿态跟踪误差e1和e2的零平衡点都能局部渐近稳定。
3 实验验证
3.1 实验平台介绍
设计了一个实验平台来验证所提出自适应控制器的有效性。四旋翼无人机和运输结构的整体图如图4所示。运输结构配有一个舵机装置,可以实现载荷的投放。为了评估所提出的自适应姿态控制器性能,基于此平台进行了一系列实验。四旋翼无人机的参数如表1 所示。实验平台主要由5 个部分组成,包括结构框架、动力系统、飞行控制系统、运输结构和电池。

表1 四旋翼无人机模型参数
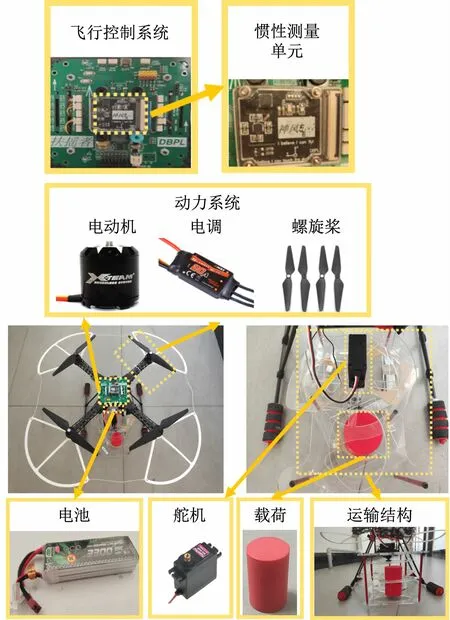
图4 四旋翼无人机载荷实验平台结构图
3.2 实验流程
为了排除自然风的干扰,选择室内飞行实验来验证该控制器的有效性。本实验采用了飞行控制系统的手动飞行模式。在起飞前,载荷被固定在四旋翼无人机运输结构中,其重心位于四旋翼无人机重心的前下方。起飞时,使用本研究设计的自适应控制器保持飞行器稳定。在起飞完成、机身稳定后分别使用本文设计的自适应控制器和反步控制器控制四旋翼无人机的悬停,在此过程中收集相关飞行数据。
3.3 实验结果
反步控制器的姿态角和电动机控制信号如图5、图6 所示。自适应控制器的姿态角和电动机控制信号如图7、图8 所示。由电动机控制信号间接表示电动机产生的升力和力矩。本实验中,在3.15 s时切换为反步控制器,在4.27 s时切换为自适应控制器。由图6 可见,在切换到反步控制器时,电动机控制信号产生突变后电动机1 和3 的转速下降,电动机2 和4 转速上升,机体产生前倾趋势。由图5 可见,四旋翼无人机的实际俯仰角从3.15 s 开始,与期望值持续偏离约7.5°。这一发现与本文中提出的干扰恒定的假设是一致的。由图7 的数据表明,四旋翼无人机俯仰角的实际值从4.27 s开始在0.50 s内逐渐收敛到期望值,最高点为7.3°,成功消除了常值偏差。由图8 可见,在切换到反步控制器后,电动机控制信号产生突变,电动机1 和3 的转速上升,电动机2 和4 的转速下降,机体不再前倾保持正常。这说明本文设计的自适应控制器能够有效控制未知质量载荷带来的干扰。
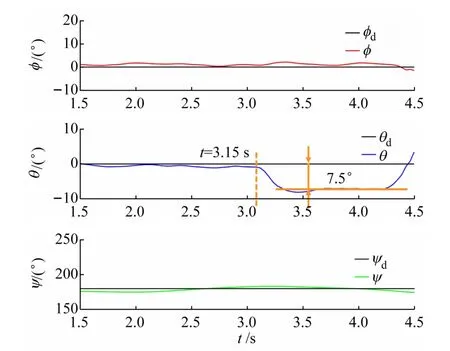
图5 反步控制器的姿态角随时间变化情况
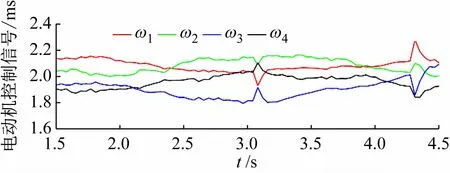
图6 反步控制器的电动机控制信号随时间变化情况
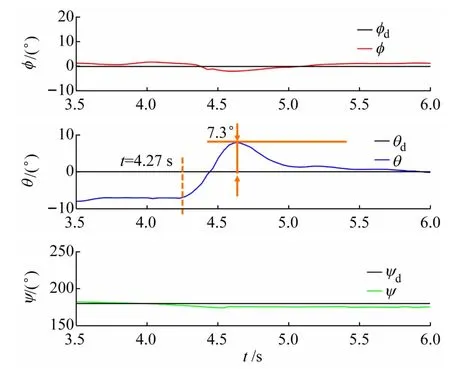
图7 自适应控制器的姿态角随时间变化情况
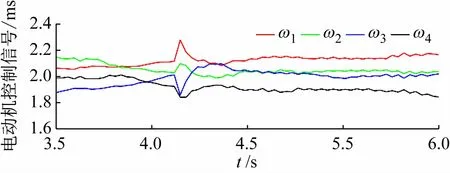
图8 自适应控制器的电动机控制信号随时间变化情况
实验过程中四旋翼无人机飞行效果如图9 所示。飞行实验截图中显示第3.3 s四旋翼无人机已经开始倾斜,到第4.0 s时飞机则保持恒定角度倾斜,切换为自适应控制器后也就是第5.0 s时飞机姿态已经不再倾斜而恢复正常,到第5.5 s 时飞机仍保持期望姿态悬停。结果表明,该自适应控制策略有效保证了四旋翼无人机姿态的稳定。相比之下,反步控制器会导致四旋翼无人机的姿态逐渐偏离期望值,受到一个方向的持续扰动而向一个方向飞行,无法满足姿态环的控制需求。
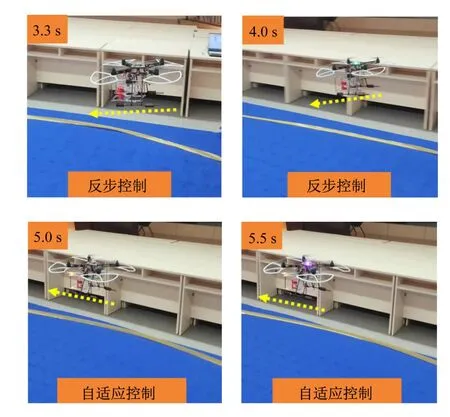
图9 不同控制方式下飞行效果照片
4 结语
基于拉格朗日法提出了一种简化的四旋翼无人机动力学模型,并设计了一种基于扰动观测器的自适应控制器,针对四旋翼无人机携带未知质量载荷带来的干扰进行有效控制,随后用Lyapunov原理证明了该控制器的局部渐近稳定性。通过飞行实验,验证了该控制器的有效性。与反步控制器相比,本文设计的自适应控制器在四旋翼无人机受到恒定干扰时保持四旋翼姿态稳定,具有更好的控制效果。
猜你喜欢
实验流体力学(2023年1期)2023-03-21
装备制造技术(2021年1期)2021-05-21
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
自动化学报(2018年2期)2018-04-12
北京航空航天大学学报(2016年3期)2016-02-27
北京航空航天大学学报(2016年3期)2016-02-27
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09