五自由度上肢康复机器人设计与分析*
2024-05-11 12:02曹俣帅
科技创新与生产力 2024年4期
曹俣帅
(安徽理工大学机械工程学院,安徽 淮南 232000)
随着现代社会经济的快速发展、人口老龄化程度的加剧,我国脑卒中人数不断增长[1]。尽管由于近年来医疗技术的进步,脑卒中患者的死亡率明显下降,然而根据调查,大约80%的脑卒中患者会伴随着不同程度的运动功能障碍,而其中55%~75%的脑卒中患者都会出现持续的上肢运动功能障碍,严重影响了患者们的日常生活质量[2]。因此,脑卒中患者需要进行合理有效的康复训练[3]。
当前的上肢康复机器人主要是两种类型:一种是末端驱动康复机器人,另一种是外骨骼康复机器人[4]。其中,外骨骼康复机器人能更准确地实现辅助运动。例如:瑞士HOCOMA 公司推出的ARMEO机器人,是一款能够提供即时反馈与评估的上肢康复机器人,支持从肩膀到手腕的整体治疗方式,能根据患者自身的情况智能地提供协助治疗[5]。
1 上肢康复机器人的总体设计方案
1.1 上肢康复机器人的结构设计
基于人体尺寸标准,考虑其结构的安全性,要使得外骨骼上肢康复机器人符合人体上肢广义关节的运动规律,同时又避免机器人结构过于复杂。本文设计了一种针对肩关节的内收/外展、内旋/外旋、屈曲/伸展,肘关节的屈曲/伸展和腕关节的桡屈/尺屈的五自由度上肢康复机器人,其肩部3 个自由度、肘部1 个自由度及腕部1 个自由度,见图1。参照GB 10000-88《中国成年人人体尺寸》[6],根据其臂长数据范围统计,上臂长度范围249~351 mm,前臂长度范围180~270 mm。设定上臂长为280 mm,前臂长为220 mm,其他关节符合人体康复训练时的运动范围,见表1。

表1 上肢康复机器人的运动范围
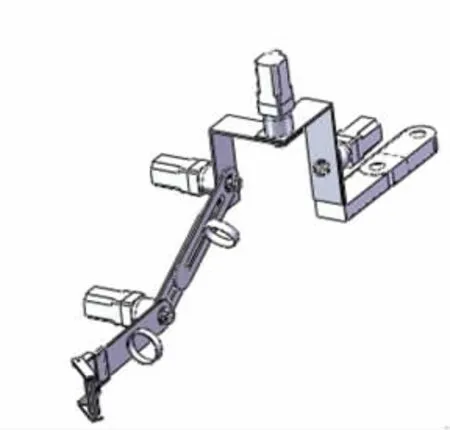
图1 上肢康复机器人模型
1.2 驱动模块选择
上肢康复机器人常用的驱动方式有气压驱动、液压驱动和电机驱动[7]。其中,气压驱动虽然来源方便、结构简单、成本低,但是它的工作速度稳定性较差、噪声大且安全性不够高;液压驱动具有运行平稳,易于控制载荷、速度和方向以及响应速度快等优点,但其总的传动效率低,受到温度影响较大且液压油也容易产生污染;电机驱动不仅精确度高、节省能源,而且使用方便、成本低。因此,选用齿轮减速电机驱动,采用了齿轮减速箱和电机的组合,其结构紧凑、可靠耐用、承载能力高,且具有能耗低、性能优越、噪声低及振动小等特性,适于机械臂的选择,见图2。

图2 电机驱动模块
2 上肢康复机器人的运动学分析
2.1 运动学建模
为了更符合直观理解,使用改进的D-H 参数法建立上肢康复机器人机械臂的连杆坐标系,其中上肢康复机器人D-H 参数见表2。
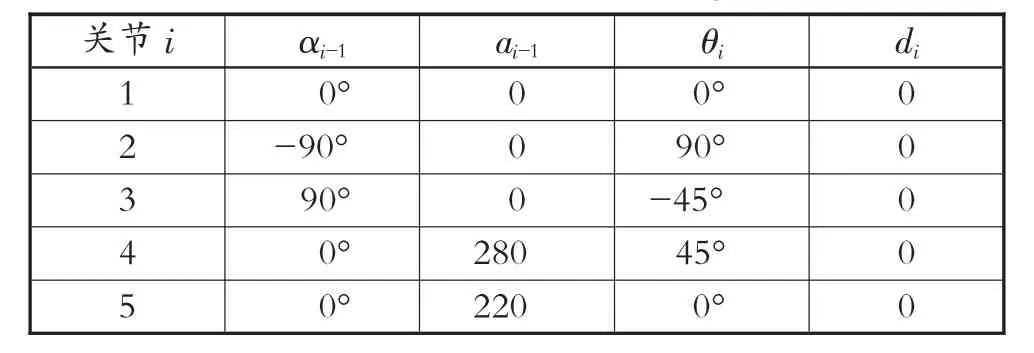
表2 上肢康复机器人D-H 参数
由于肩部3 个关节的轴心都指向同一点,这里将其定义为坐标原点O0,且可以将上肢康复机器人的模型进行简化,把肩关节的3 个自由度整合到一点,建立连杆坐标系。在初始位姿时,使得原点坐标系中的O0与简化后的3 个自由度的O1O2O3重合[8],肘关节和腕关节的坐标系分别为O4和O5,见图3。

图3 机器人连杆坐标系
2.2 正运动学分析
通过已知的坐标系的参数,可求出变换矩阵,变换矩阵的一般表达形式为
其中各个连杆的变换矩阵分别为
将上述5 个连杆的变换矩阵相乘,得到机械臂末端相对于基座标系的变换矩阵为
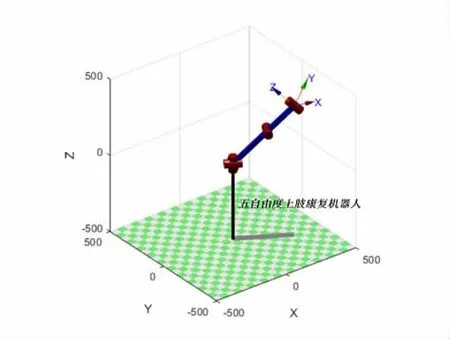
图4 在θ1~θ5 配置下的位姿示意图
3 上肢康复机器人的工作空间仿真分析
由于机器人的工作空间直接影响机器人结构设计的合理性和患者康复训练的效果,因此对上肢康复机器人的工作空间仿真分析是必不可少的。本文采用的是蒙特卡罗法,蒙特卡罗法也称统计模拟法、统计实验法,它是使用随机数来解决计算问题的方法[9]。在设定的关节角度范围内,应用MATLAB中rand () 函数和建立的正运动学模型对机器人工作空间范围进行求解。设定每个关节空间随机产生7 000 个关节角,仿真运算生成的随机点的集合即为机器人的工作空间,得到的机器人工作空间云图 见图5。

图5 工作空间云图
由图5 可以明显看到,机器人的工作空间类似于一个空心半球体,符合机器人各关节的运动范围,完全满足日常康复训练要求。
4 上肢康复机器人的轨迹规划
机器人的运动轨迹规划是康复训练中极其重要的环节,一般的轨迹规划分为机器人关节空间的轨迹规划和笛卡尔空间的轨迹规划两种[10]。本文使用五次多项式插值法,对其进行关节空间轨迹规划,解决了三次多项式关节角速度和加速度突变问题,有助于康复训练的顺利进行。五次多项式中关于起始点和终止点的位置、速度、加速度的约束函数可以表示成方程组为
通过对式(3)的求解,以患者完成一次康复训练为例,设定机器人的初始角度θi=[0 0 0 0 0]运动到期望角度θf=[π/4 -π/6 π/6 π/4 π/6],完成一次康复训练的时间为3 s,应用MATLAB 机器人工具箱中的jtraj () 函数对上肢康复机器人进行五次多项式轨迹规划仿真。
图6 为机器人的运动轨迹图及各关节角的角度、速度、加速度图。

图6 机器人的运动轨迹图及各关节角的角度、速度、加速度图
由图6 可知,各个关节角的角度、速度、加速度都是连续变化的曲线,没有产生突变,表示整个康复训练过程是安全的,因此能够满足患者的康复训练。
5 结论
基于上肢康复训练的康复需求,本文设计了一种五自由度上肢康复训练机器人,其中肩部的3 个自由度能完成肩关节的内收/外展、内旋/外旋、屈曲/伸展,以及肘部和腕部的各自1 个自由度可以分别满足肘关节屈曲/伸展和腕关节的桡屈/尺屈。运用改进的D-H 参数法建立其坐标系,并通过MATLAB 机器人工具箱对其进行正运动学建模。同时对机器人进行工作空间仿真分析,验证了其完全满足患者日常康复训练范围。最后通过五次多项式插值法对其进行康复训练的轨迹规划,得出的各个关节角的角度、速度及加速度曲线进一步证明了机械臂康复训练过程中的安全合理性。实验结果表明此上肢康复训练机器人在技术层面上是可行的,能对患者进行安全有效的康复训练,为后续机器人的改进、优化工作奠定了基础,对未来的上肢康复机器人研究也有着重要意义。
猜你喜欢
装备制造技术(2020年11期)2021-01-26
中华养生保健(2020年2期)2020-11-16
测控技术(2018年6期)2018-11-25
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
中国自行车(2018年4期)2018-05-26
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
制造业自动化(2017年2期)2017-03-20
中国民族医药杂志(2016年7期)2016-05-09
实用手外科杂志(2015年2期)2015-08-28