
城市公园垃圾箱智能化设计
2024-05-07 00:02:42唐真魏昌海
设计 2024年5期
关键词:用户体验
唐真 魏昌海
摘要:探究一款适用于城市公园的智能垃圾箱,旨在减轻清洁人员的劳动强度,同时增强游客自主分类意识。将城市公园垃圾箱使用者分为清洁人员、游客两类人群,对两者进行观察、问卷访谈,运用kano模型挖掘2类用户亟须解决的痛点,为研发设计提供依据。从空间自适应调节、清洁提醒、垃圾分类投放引导三方面进行设计。垃圾箱空间自适应调节通过超声传感器、控制模块调节不同类别垃圾之间的空间比例;清洁提醒由手机移动端、垃圾箱屏幕标识实现;游客分类投放引导包括无接触感应投放口与动态标识设计。
关键词:智慧城市家具;城市公园垃圾箱;智能化设计;用户体验;空间自适应调節
中图分类号:TB472 文献标识码:A文章编号:1003-0069(2024)05-0107-04
Abstract:To explore a smart dumpster suitable for urban parks,which aims to reduce the labor intensity of cleaning staff and improve the awareness of tourists independent classification. Dumpster users in urban parks are divided into two groups:cleaning staff and tourists. Observation and questionnaire interview are conducted on both groups. kano model is used to dig out the pain points urgently needed to be solved by the two groups of users,so as to provide a basis for research and development design. The intelligent design of dustbins in urban parks was carried out from three aspects:spatial adaptive adjustment,cleaning reminder and garbage classification guidance. Dustbin space adaptive adjustment through ultrasonic sensor,control module to adjust the space proportion between different types of garbage;The cleaning reminder is realized by the mobile phone and the screen identifier of the dustbin. Visitor classification guide includes noncontact induction port and dynamic sign design.
Keywords:Intelligent urban furniture;Urban park dustbins;Intelligent design;User experience;Space adaptive adjustment
引言
城市公园是城市居民休闲、游览、锻炼、交往,以及举办各种集体文化活动的场所,公园垃圾箱分类设置不合理、垃圾清理不及时、垃圾未正确分类、垃圾箱布局不合理等诸多问题严重影响公园环境质量、游客体验以及清洁人员工作量。2019年7月,上海市率先开展垃圾分类工作,掀起智能垃圾箱研发热潮。如何利用前沿技术赋能环卫设施,通过合理巧妙的设计有效提高城市公园垃圾回收率,减轻清洁人员的劳动强度,同时增强游客自主分类投放意识,是城市公园智能垃圾箱产品必将面对且亟待解决的难题。本文从游客和清洁人员2类使用人群需求视角出发,试图探索城市公园垃圾箱的智能化设计。
一、相关研究
国内于2000年时开始研究垃圾箱智能化系统,2009年初步探索全自动智能垃圾分类机,2015年开始关注智能分类垃圾箱,2016年拓宽智能分类的研究思路,多角度分析智能垃圾箱优化并持续至今。

在智能化设计方面,主要有垃圾智能分类、容量监测系统、垃圾可回收系统、语音交互体验。胡中艳提出,利用模式识别技术进行垃圾自动分类[1]。黄国维优化垃圾图像识别技术,通过卷积神经网络学习以便提高垃圾分类识别结果[2]。吴碧程等人提出采用以树莓派作为主控模块,嵌入卷积神经网络并配合辅助机械结构的方法解决人工垃圾分类低效、成本高的问题[3]。张文玮结合机械设计、传感器、物联网、嵌入式系统设计、深度学习、机器视觉等技术,设计一款自动分类的智能垃圾箱,并提出一种基于深度残差神经网络的垃圾图像分类识别方法[4]。谭淑梅等人设计一种基于单片机为核心的垃圾箱容量监测系统[5]。熊建桥等人利用机械传动结构结合智能传感器,实现智能垃圾箱感应开合、检测与压缩功能[6]。高士雅等人构建生活垃圾分类回收处理体系,并设计一款智能分类垃圾箱,结构包括树莓派、Arduino开发板、摄像头、舵机、光电传感器、重量传感器[7]。魏子瑄将运动传感器、语音识别芯片、播报芯片、舵机等硬件模块集中在Arduino开发板中实现智能垃圾箱的搭建,并可通过App进行互动[8]。
二、垃圾箱调研分析
城市公园中智能垃圾箱尚未普及,多数仍以传统垃圾箱为主,而智能垃圾箱多用于城市社区,故需对城市公园垃圾箱、智能垃圾箱两者的现状特征进行调研分析。
(一)城市公园垃圾箱现状调研分析
以上海城市公园为例,垃圾箱具有以下特征(图1a):① 传统垃圾箱多采用双桶对称式结构,由内置可抽离的垃圾箱加上金属外壳组成。② 垃圾分类基本设置两类,即可回收垃圾、干垃圾。周末、节假日由于垃圾投放量较大,通常又增添了一个或多个可移动的大型单桶干垃圾箱。然而,游客更愿意向大敞口的单桶垃圾桶投放垃圾,造成垃圾混投。③ 垃圾分类标识均符合国标要求,贴纸或喷涂,但总体较小,不便于游客获取对应信息。
城市公园已投放使用的智能垃圾箱以可回收物品为主。如上海岭南公园已引入智能交投回收驿站(图1b),包括饮料瓶、废旧衣服、报纸、手机、过期药品、废旧灯管和灯泡,配合LED显示屏、感应投放口、摄像头等模块,利用积分换物的方式刺激园内游客投放可回收垃圾,一侧还嵌着迷你“无人超市”。形态结构上,采用分离式设计,内部仍为普通垃圾箱,外部辅以智能感应设备,可识别投放垃圾种类的监控设备和底部的可回收物称重结构。
(二)智能垃圾箱现状调研分析
智能垃圾箱多以社区垃圾集中服务站的形式出现,分设多个垃圾桶,且以收集可回收物品为主。智能功能点以太阳能供电、感应投放口、LED显示屏、溢满检测、灯光照明或反馈为主。有的为激励用户投递,还会再设立积分兑换的奖品箱。但垃圾集中服务站垃圾类型全,占地面积较大,单个箱体外形尺寸占地面积为0.7m2左右,内置240L普通垃圾桶,不太适用于城市公园中垃圾箱个数用量大的需求,因此,需要调研城市公园常见的垃圾类型,设计出一款适用于城市公园投放需求的垃圾箱。
三、用户体验分析
目前,常见智能垃圾箱的功能、结构设计基本仅考虑游客垃圾分类引导与奖励,并未考虑清洁人员的工作需求。因此,将垃圾箱使用人群划分为清洁人员、游客,采取观察记录和访谈形式探析两类用户需求,最后运用kano模型进行需求优先级排序,找出亟待解决的痛点。
(一)清洁人员体验分析
1.观察记录
首先,观察记录清洁人员清洁垃圾动作过程,记录主要节点动作,寻找优化或解决方案。观察发现,由于垃圾桶内置于垃圾柜中,清洁人员清理过程步骤繁琐,垃圾混投情况严重需再次分拣,并且在清理、擦拭垃圾箱时频繁弯腰、反复劳作,垃圾桶外观设计导致棱角处不易清理(表1)。工作量极大,节假日更甚。
通过分析以上问题,设计可尝试解决优化垃圾清理方式,让清洁人员无需将内置垃圾箱单独取出倾倒;优化垃圾桶的人机尺寸,解决清洁不便捷的问题;垃圾箱与用户接触的棱角需进行圆滑处理,避免磕碰问题。
2.用户访谈
通过对多位清洁人员进行访谈找寻需求点。访谈发现,清洁人员的工作要求包括规定清理时间、垃圾倾倒频次、垃圾箱储量高度、垃圾箱擦拭频次等,需要频繁巡视、清洁,工作低效。工作需求可归结为4点:①减少工作频次,降低劳作强度;②及时了解垃圾箱储量情况,溢满时及时收到通知;③游客能够按照规定分类进行投放;④垃圾箱便于清洁。

(二)游客体验分析
1.观察记录
游客在投放垃圾时,视线仅停留在平视区、垃圾分类处,并未觀察下方引导标语,同时存在摸索打开投放口的试错行为,无法在短时间内投掷。此外,由于垃圾箱高度尺寸设计不合理,投放垃圾需将手部抬高至肩膀高度(表2)。
2.问卷调研与访谈
针对城市公园中的游客,现场共发放350份问卷,回收329份有效问卷,问卷有效率94%,结果分析见表3。城市公园垃圾箱分类不合理,没有湿垃圾箱,导致游客随意投放湿垃圾,造成清洁人员二次分拣,甚至无法分拣将可回收垃圾也一起倒入干垃圾中。垃圾箱分布及设置数量也存在问题,超过60%的游客在垃圾溢满时仍旧继续投放,不愿寻找其他垃圾箱。
进而随机抽取5位游客进行用户访谈,游客需求归纳为以下4点:① 便于找寻垃圾箱;② 及时清理溢满的垃圾箱;③ 垃圾分类标识需清晰;④ 需增加垃圾种类。
(三)需求优先级分析
整理智能垃圾箱功能和相关用户需求,借助Kano模型分析功能和属性优先级。其中洁净特征、无接触投放特征属于必备型需求,表示优先级最高;适宜容量特征、辅助分类特征属于期望型特征,表示优先级其次;地域特色特征和辅助照明属于魅力型需求,代表优先级最低。
四、城市公园垃圾箱智能化设计
(一)设计构思
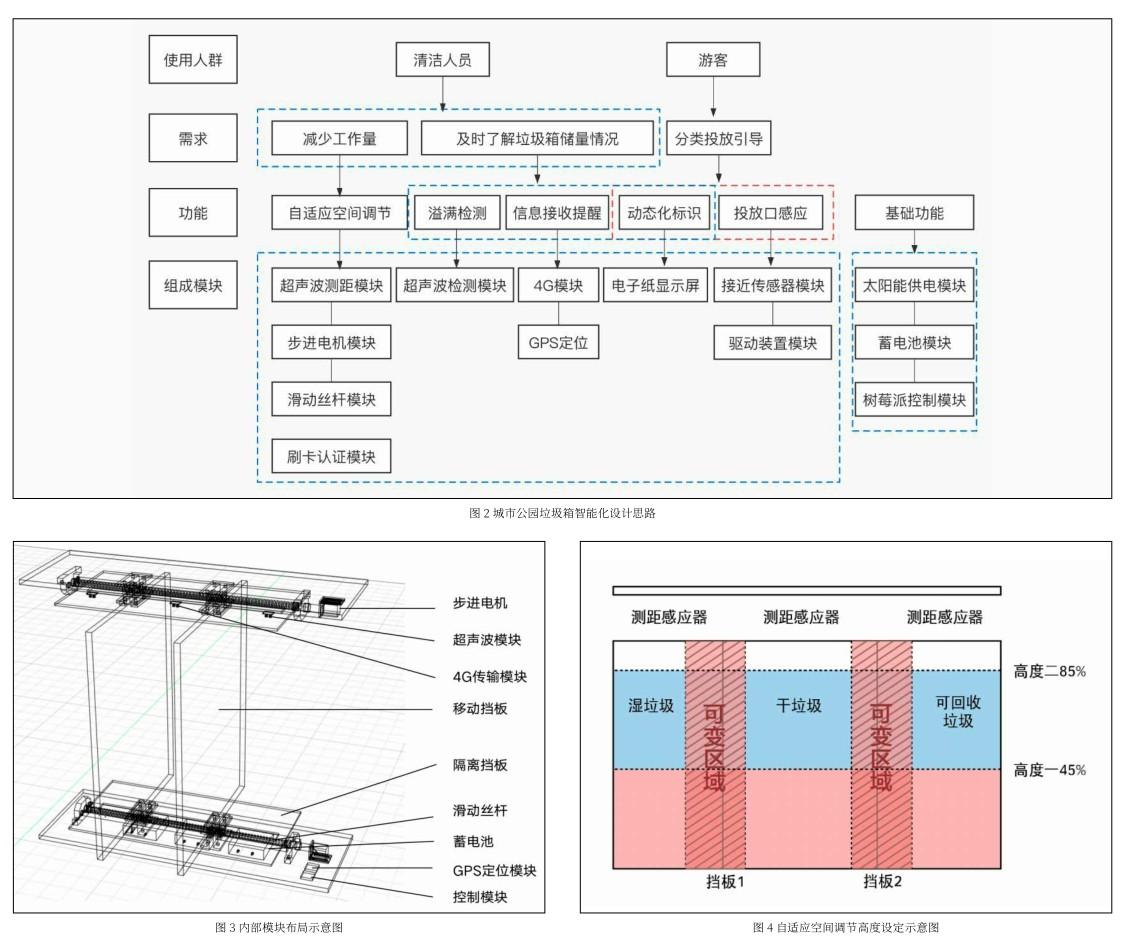
根据调研结果,针对清洁人员需求点(减少工作频次,及时了解园内垃圾箱储量情况)、游客需求点(分类投放引导),提出以下3个功能创新点解决上述需求问题:①垃圾箱空间自适应调节功能解决工作频次较高的痛点;②溢满提醒功能解决不能及时了解垃圾箱储量情况;③动态化标识功能解决分类投放引导的需求。功能实现离不开对应模块的组建,逻辑对应关系见图2。
(二)自适应空间调节

传统垃圾箱内部容量是一个固定的值。针对清洁人员降低劳作强度的需求,本设计提出智能垃圾箱空间自适应调节的创意理念,测量桶内垃圾含量,调节3种垃圾之间的空间比例,使得箱内垃圾储量总体高度下降,从而避免单独分类溢满、其他分类空箱的情况,最终降低清洁频率。
1.空间容量比例分配
垃圾箱顶部为太阳能板并安装超声波感应模块测距。基于顶部发出的向下声波与探测到箱内垃圾的返回声波之间的时间差值,计算出剩余空间的高度。
城市公园干垃圾需求最大,可回收垃圾次之,湿垃圾最少,故将干垃圾居中,由两块可移动挡板调节,两侧分别为湿垃圾、可回收垃圾。在模块组合方面,可移动挡板经太阳能板充电转化电力至锂离子电池,再由锂离子电池向控制模块供电,控制模块下达移动指令,步进电机带动滑动丝杆转动。在垃圾储量较大时,单点受力推动垃圾容易卡机、模块损坏变形移位,故上下方各采用一组步进电机、滑动丝杆模组。挡板由上下两组中的步进电机、滑动模块固定,运动时由1个控制模块向两个步进电机发送移动指令(图3)。
2.容量状态调节
根据3类垃圾的投放需求,容量分配对应比例初设干垃圾、可回收垃圾、湿垃圾的空间占比为40%、35%、25%。垃圾箱内部空间中可变区域,即挡板移动区域设定为各25%的空间占比。根据3种垃圾分类的投放需求比例,挡板1(湿垃圾箱与干垃圾箱之间的挡板)向左侧移动,即扩大干垃圾箱空间、缩减湿垃圾箱空间的值设定最大为15%,向右侧移动的空间值设定为最大为10%;挡板2同理。据此移动规则,可推算出干垃圾箱最大容量比例为40%+15%+15%=70%、最小容量比例为40%-10%-10%=20%,可变容量区间为20%~70%;可回收垃圾箱最大容量比例为35%+10%=45%、最小容量比例为35%-15%=20%,可变容量区间为20%~40%;湿垃圾箱最大容量比例为25%+10%=35%、25%-15%=10%,可变容量区间为10%~35%。
实时调节垃圾箱内部空间可能导致储备电力过度消耗无法运作,以及高频次工作造成器件磨损过度、加剧老化,故将智能垃圾箱设定2个挡位高度。高度一的值设定为总高度的45%,此时垃圾容量即将过半,需调节挡板位置平衡垃圾总量高度;高度二的值设定为总高度的85%,此时垃圾即将满载,需再次调节挡板位置平衡垃圾总量高度,并向后端发送清理请求,通知清洁人员及时前来清洁。红色区域为高度一的范围,蓝色区域为高度二的范围(图4)。检测结果超过高度一、高度二时,控制模块才会判定挡板需移动,步进电机带动滑动模块、挡板做出相应移动指令。
枚举垃圾箱内部垃圾存量的不同高度情况,得出27种场景分类,编写数据代码烧录至控制模块即树莓派模块。多次模拟学习记录数据后,空箱状态时挡板移动至初始状态位置。例如,当3个测距模块检测结果显示垃圾均未超过高度一时,挡板均不做出反应;当干垃圾对应的感应器检测垃圾超过高度二,而湿垃圾、可回收垃圾对应的感应器检测未超过高度一时,挡板1向左移动15%,从而扩大干垃圾箱容量、降低高度得以继续存放。
(三)垃圾箱清洁提醒
1.溢满信息移动端远程提醒
当清洁人员与溢满垃圾箱位置较远时,通过垃圾箱顶部嵌有的超声波模块检测箱体内垃圾高度,当检测箱体内部垃圾超过高度二(85%)时,箱内的识别定位模块、4G模块将此刻状态传输至后端管理系统进行信息处理后发送至移动端(图3)。
信息包括垃圾箱编号、定位、储备电量、剩余容量、推荐清洁路线等。清洁人员查看信息,前往清理。垃圾清洁后,超声波传感器计算剩余容量,数值归零。
2. 垃圾箱溢满动态标识反馈
除发送提示信息外,在垃圾箱显示屏上也会显示溢满动态标识,会根据检测结果在外屏实时展示储量信息图标,不同的图标对应不同检测结果。清洁人员可主动查看标识便知垃圾清理的对应分类,游客看到便会停止投放。
本设计采用电子墨水屏显示技术(EPD)实现标识反馈功能。其电泳式微胶囊型技术可创造更锐利清晰的图案或文字,视觉感受上类比纸张效果,规避液晶显示屏在室外因阳光反射无法看清图案的弊端。
(四)垃圾分类投放引导
1.无接触感应投放口设计:本设计采用接近感应无接触自动开启、闭合式投放口,有效防止垃圾异味扩散或溢满继续堆放;3类垃圾的投放口各自设置感应器,避免垃圾混装。进而进行无接触投放口的传感器位置测试与型号选择。传感器常设置于投放口上部或侧面位置。由于用户身高或站立位置导致传感器探测不到,导致寻找投放口,或误以为智能垃圾箱损坏。因此,经多组测试,控制感应器摆放在垃圾箱底部,用户在靠近垃圾箱投放时腿部、脚部率先抵达感应器感应范围,开启投放口。此外,本设计选用NPN接近传感器解决智能垃圾箱投放口断电时无法开启的问题。

2.动态化标识设计:针对园内游客垃圾分类辅助投放的需求,垃圾箱显示屏进行动态化标识设计。这不仅可以展示更多分类引导信息,同时在视觉上还可以吸引游客注意力,强化游客正确垃圾分类意识。
垃圾箱动态图标显示部分为上下2部分,上部为垃圾分类标识,下部为使用方式动态标识(如感应投放口、分类引导投放、垃圾投放结束后反馈标识),上方被关注的优先级高于下方(图5、图6)。图标对应分类田字形呈现,采用逐帧动态语言、线性动态语言、闪图动态语言3种动态标识设计语言呈现。接近感应器未探测到用户投放垃圾时,图标以闪图形式动态化显示,间隔时间为30秒;当探测到有用户在距离范围内时,间隔时间设置为3秒。
结语
智能垃圾箱应具备网络化、智能化、开放化、节能化、易用性的特点。智能垃圾桶是采用微电脑控制芯片、红外传感探测装置、机械传动部分组成,是集机光电于一体的高科技新产品。本设计切实以清洁人员和游客需求为主导,提出空间自适应调节、溢满清洁提醒、垃圾分类动态标识引导的解决方案,并搭建各类功能模块予以实现,以期为公共环境中的智能垃圾箱设计提供思路。城市公园智能垃圾箱需求量大,应做到在具备相应功能的同时降低其生产成本、运输成本以及维修成本,后期希望优化其设计成本,为更优的生活环境做出贡献。
基金项目:上海市哲学社会科学规划青年项目(项目编号:2019ECK010)
参考文献
[1]胡中艳,曹阳,孙建华.模式识别技术在自动分类垃圾桶概念设计中的应用[J].包装工程,2008,29(12):214-216.
[2]黄国维.基于深度学习的城市垃圾桶智能分类研究[D].安徽理工大学,2019.
[3]吴碧程,邓祥恩,张子憧,等.基于卷积神经网络的智能垃圾分类系统[J].物理实验,2019,39(11):44-49.
[4]张文玮.智能自动分类垃圾箱算法设计及其嵌入式实现[D].西安理工大学,2021.
[5]谭淑梅,李松.基于单片机的智能垃圾箱的设计与制作[J].大庆师范学院学报,2020,40(03):96-103.
[6]熊建桥,陆卫,季小涵,等.一种智能分类垃圾桶系统的设计[J].机电产品开发与创新,2016,29(05):27-29+26.
[7]高士雅,胡晓颖,董景峰.生活垃圾分類回收处理体系及智能分类垃圾箱设计[J].物流技术,2021,40(07):110-114+135.
[8]魏子瑄,刘小刚,陈真贵,等.基于语音识别技术的智能分类垃圾桶[J].单片机与嵌入式系统应用,2020,20(01):79-82.
图片来源:文中所有图表均为作者自制
猜你喜欢
今传媒(2016年11期)2016-12-19 13:12:24
今传媒(2016年11期)2016-12-19 12:21:02
艺术科技(2016年10期)2016-12-14 23:07:47
艺术科技(2016年10期)2016-12-14 20:53:49
艺术科技(2016年9期)2016-11-18 18:05:44
艺术科技(2016年9期)2016-11-18 16:15:56
艺术科技(2016年9期)2016-11-18 15:11:16
出版科学(2016年5期)2016-11-10 06:47:04
农业与技术(2016年15期)2016-11-09 17:19:04
文艺生活·中旬刊(2016年9期)2016-11-07 03:31:21
