振动作用下平直翅片管结霜初期微液滴运动过程数值模拟
2024-04-29 03:08关维娟陈清华季家东王建刚
振动与冲击 2024年8期
关维娟, 陈清华, 张 斌, 季家东, 王建刚,4, 刘 萍
(1. 安徽理工大学 数学与大数据学院,安徽 淮南 232001;2.安徽理工大学 环境友好材料与职业健康研究院(芜湖),安徽 芜湖 241003; 3.安徽理工大学 矿山智能装备与技术安徽省重点实验室,安徽 淮南 232001;4.广东立佳实业有限公司,广东 东莞 523000)
换热器是将热流体部分热量传递给冷流体的设备,广泛应用于石油、化工、冶金、电力、船舶、集中供暖、制冷空调、机械、食品、制药等领域,在工业生产中具有重要地位。结霜状况下换热器的传热系数急剧降低,换热性能恶化,能耗大幅度增长,因此抑制换热器结霜一直是众多学者研究的热点问题。刘中良等[1-3]利用强吸水材料降低换热器附近水蒸气的绝对含量从而减少霜层的形成Wu等[4-5]等研究了超疏水表面对霜层形成的抑制作用,除以上研究方法外,Li[6-7]等试验研究了频率为20 kHz的超声波抑霜效果,Cheng等[8]研究了机械振动对结霜过程的影响。
冷面上湿空气相变结霜基本上都经历了水珠生成、聚合长大、水珠冻结的过程,吴晓敏等[9]通过对冷面上结霜的显微过程进行分析发现,与以往的理论和模型有所不同的是,在结霜的初始阶段,液滴可能会以过冷水的形态存在一定的时间。许旺发[10]通过可视化显微摄像的手段,对各种工况下的结霜过程进行试验研究,描述了冷面结霜的细微过程,分析了水珠开始冻结时间、冻结粒径以及初始霜晶形状等随工况的变化规律。Kim等[11]在空气源热泵系统运行的工况下进行试验,观察了各种不同壁面接触角的翅片表面在结霜初期的液滴凝结现象,分析了液滴凝结核产生的平均高度、半径、数量和密度。
而在液滴还未冻结形成霜层之时,对液滴的运动状态进行操控,加速液滴的滑落,可以减少液滴在冷表面上停留的时间,从而在一定程度上抑制结霜的发生。目前很多学者对液滴操控技术在强化换热[12]、抑制结冰[13]、液体运输[14]领域进行了研究,外界刺激强化液滴的运动,如温度场、电场、磁场以及光照等,成为目前的常用的方法。近些年也有学者将机械振动添加到液滴运动的控制之中,对于一定尺寸体积的液滴存在由共振频率和最优振幅组成的最佳振动加速度,可使液滴达到该条件下的最优运动速度[15]。
虽然已经有一些学者对于振动作用下液滴的运动进行了研究,但是特别针对平直翅片管结霜初期微液滴的运动机理以及振动特征参数对液滴运动的影响还不清楚,因此本文对某型号平直翅片管上不同尺寸的微液滴在30 Hz、40 Hz、50 Hz的正弦周期性振动作用下的运动特性进行CFD数值模拟研究,并进行试验验证,探究不同尺寸的微液滴滑落的最佳振动频率。
1 平直翅片管换热器结霜初期微液滴生长
1.1 物理模型
选用某种型号的小型平直翅片管换热器进行研究,三维整体结构如图1所示,构建三维模型之后,根据换热器结构的周期对称性,选取基管附近位置的翅片内空间作为求解域进行数值模拟研究,从平直翅片管求解域中提取出的求解域,如图2所示。求解域为整体最大尺寸为L×H×W=14 mm×2 mm×14 mm,正中心的圆柱形镂空的直径D=9.52 mm。
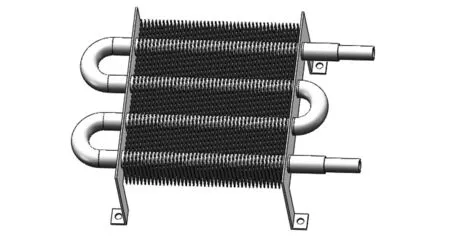
图1 小型平直翅片管换热器三维结构Fig.1 Three-dimensional structure of small flat finned tube heat exchanger
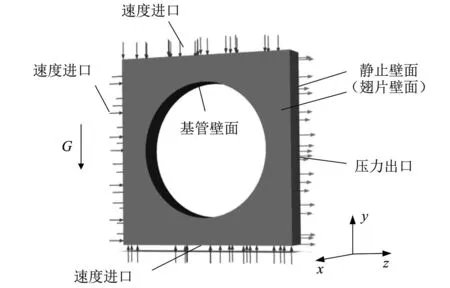
图2 物理求解域三维结构及边界条件Fig.2 Three-dimensional structure and boundary conditions of physical solution domain
边界条件设置如下:图2表示了计算模型的边界条件,G为重力,其方向指向y轴的负方向;前后壁面为无滑移壁面,基管壁面为静止壁面,顶部、底部及一侧边界采用速度入口边界条件(边界速度设置为0),右侧边界为压力出口边界条件,上述壁面条件的具体参数设置,如表1所示。
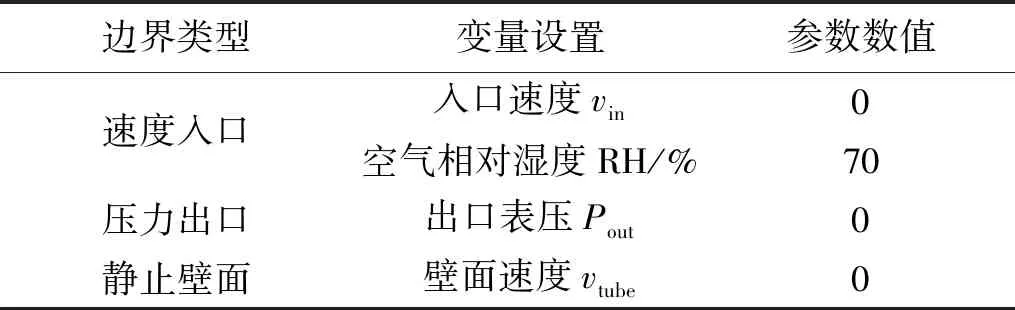
表1 边界条件具体参数
利用ANSYS Meshing对求解域进行网格划分,将求解域沿对角线分割为四个区域然后进行共节点操作,图3为本节数值模拟使用的网格,每个区域相交的界面上的网格都为共节点,保证数据传输的精确。求解域网格整体采用六面体网格,在保证网格质量的同时提高了计算精度。
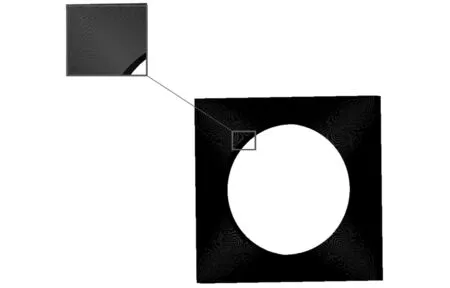
图3 液滴生长数值模拟网格划分Fig.3 Meshing for numerical simulation of droplet growth
求解域模型尺寸符合真实的平直翅片管的尺寸,此外,对计算域进行网格独立性分析验证,如表2所示,设置六种不同大小的网格尺寸并记录不同网格尺寸下的500 s时的液滴半径变化以及计算所需的时间。由表中数据可看出网格尺寸取0.05~0.01 mm时,液滴半径变化差距微小,但实际计算所需的时间却相差很多,为兼顾计算速度和计算精度,最终取网格尺寸为0.05 mm,得到网格Elements为3 245 760,Nodes为 3 360 852。
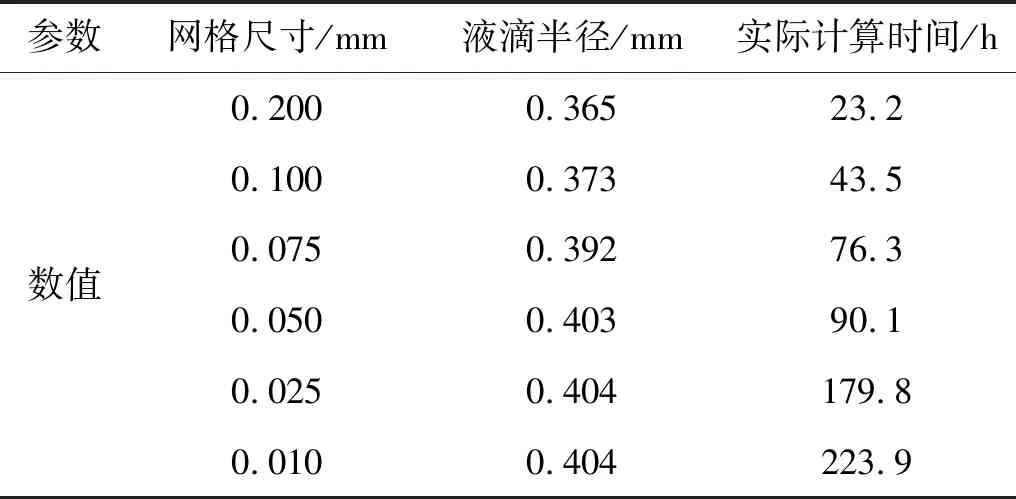
表2 网格独立性验证
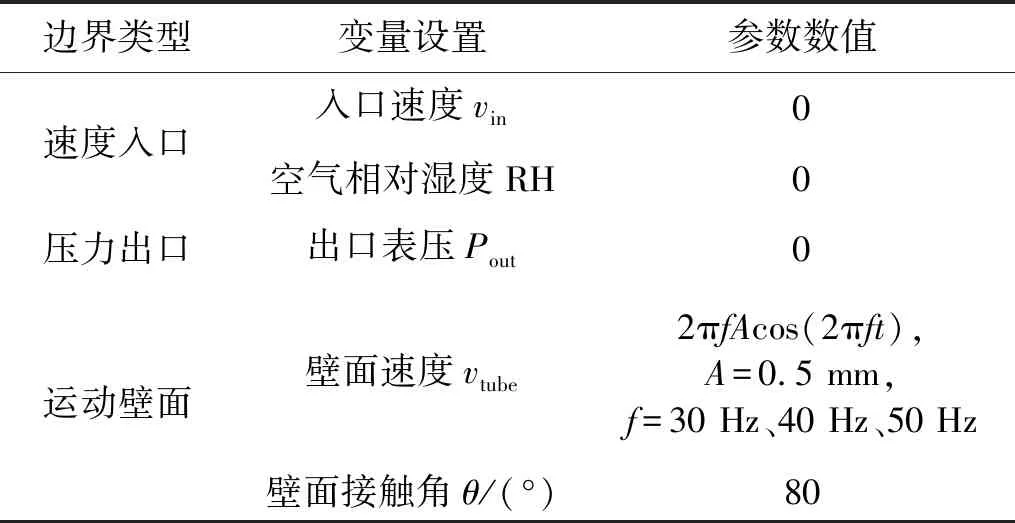
表3 微液滴振动边界条件具体参数
1.2 数学模型
根据结霜机理可知,湿空气在冷壁面附近结霜过程存在液滴形成和生长的过程,本研究预期使用施加机械振动的方法加速液滴在圆管外表面的抖落过程,所以首先需要对液滴生长的该过程进行数值模拟研究,获得液滴的宏观形状,为后面的振动数值模拟奠定基础,由于液滴生长。常见的液滴下落之后再静止来获得液滴在圆管外表面形状的方法,由于液滴下落之后难以停止振动,所以不适合用于本研究。
将初始微小液滴直径视作液滴成核直径,单个液滴传热总热阻为
(1)
式中:Dmin为成核直径,mm;D为液滴直径,mm;hi为湿空气中水蒸气液滴表面冷凝传热系数;θ为表面接触角;ki为液滴的热导率;ke为接触区域的有效热导率;kw为冷面的热导率;δe为疏水表面上微纳结构的高度;δw为冷表面厚度。
热流q由湿空气在液滴表面冷凝产生,可用液滴体积变化率、密度、相变潜热三者的乘积表示
(2)
式中:V为液滴体积;t为时间;ρl为液滴密度;Hgl为相变潜热。
同时,热流q与传热总温差ΔT及总热阻R有如下关系
(3)
可得液滴体积生长率表达式
(4)
1.3 数值模拟流程
利用计算流体力学软件Fluent对平直翅片管外湿空气冷凝成液滴的过程进行数值模拟,采用VOF多相流模型,设置湿空气为主项,水为次项,由于翅片管之间的间距较小且本次模拟中风速不作为主要因素考虑,黏度方程选择层流模型。本研究只考虑了单个液滴的冷凝情况,且假设湿空气中水分的冷凝只发生在液滴的表面。为了产生凝结核从而确定液滴初始生长的位置,首先初始化整个区域液相体积分数为零,然后patch一个微小的区域为液滴生长初期的凝结核,而忽略了这个微小液滴形状对液滴生长过程液滴形状造成的影响。微小液滴的初始位置为(1 mm, 4.76 mm, 0),液滴初始直径为0.2 mm,水密度为ρ=1 000 kg/m3。其余物性采用Fluent材料库中liquid的物理属性。采用SIMPLE求解器,压力求解设置为PRESTO!,动量方程求解采用二阶迎风方程,为满足数值模拟计算精度要求和计算资源的节省,经过多次尝试,设置时间步长为0.005 s[16]。
1.4 数值模拟结果
本文使用的液滴初始直径为0.2 mm,大于液滴的成核直径,只有当液滴的直径大于成核直径时,液滴才能生长。文献[17]给出了液滴生长过程中尺寸随时间的变化过程,Tw=-8℃,Ta=21℃,RH=70%,壁面接触角为145°的疏水表面,本文在这一工况下进行数值模拟,与文献[17]给出的数据进行对比,图4中本文的数值模拟结果与文献[17]中的理论值吻合较好,与试验值趋势相同,以此验证数值模拟结果的可靠性。
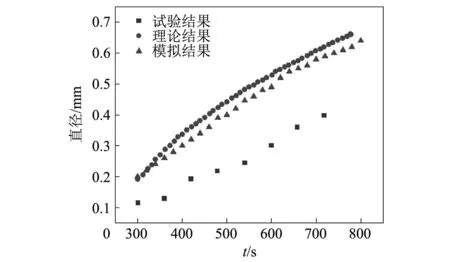
图4 微液滴生长的文献对比Fig.4 Comparison of literature on microdroplet growth
从图4中可以看出,无论使用何种方法,液滴的直径随时间增大。理论计算与本文数值模拟得到的液滴直径比试验值大。经过分析后认为是凝结核的形成需要相对较长的时间,而本文使用的方法没有这一过程所以相当于加快了液滴生长的进程。
2 振动抑霜数值模拟分析
2.1 数值模拟流程
利用不同时刻的微液滴数据文件,在求解域上施加振动频率为30 Hz、40 Hz、50 Hz的水平方向正弦周期性振动进行数值模拟研究,本章的物理模型和数学模型均与第1章相同。由于结霜初期微液滴冷凝的速度相对较慢,认为微液滴在这段时间内并未发生冷凝现象,微液滴的体积和形状没有发生变化。
由于需要模拟翅片管基管位置的振动对微液滴的影响,所以需要在基管位置施加振动边界,数值模拟的物理模型和边界条件(见图2),其他边界条件不变,基管壁面条件设为运动壁面边界条件。
本章模拟的是水平正弦周期性振动对微液滴运动状态的影响,运动状态的公式如下,包含运动的振幅和频率
y=Asin(2πft)
(5)
在Fluent中只能对壁面运动的速度进行定义,所以需要对式(5)进行微分,得到振动壁面的运动速度公式
v=2πfAcos(2πft)
(6)
利用Fluent提供的用户自定义函数UDFs功能,使用DEFINE_PROFILE命令编写程序,设置余弦速度函数,编译完成后将其加载到模型中的翅片管基管壁面上,调整运动方向为y方向,其他的参数设置保持与1.1节参数相同[18-19]。
2.2 数值模拟结果
2.2.1 模拟结果试验验证
本节搭建了试验平台对数值模拟结果的可靠性进行了验证,由图像采集系统和激振系统两部分组成,试验平台实物如图5所示。
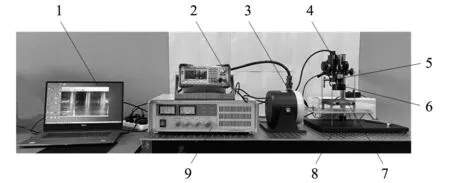
1.计算机; 2.信号发生器; 3.模态激振器; 4.USB 3.0高速CCD工业相机及镜头; 5.相机支架; 6.LED环形光源; 7.小型平直翅片管换热器; 8.基座; 9.功率放大器。
试验使用主要仪器的型号与生产厂家,如表4所示。
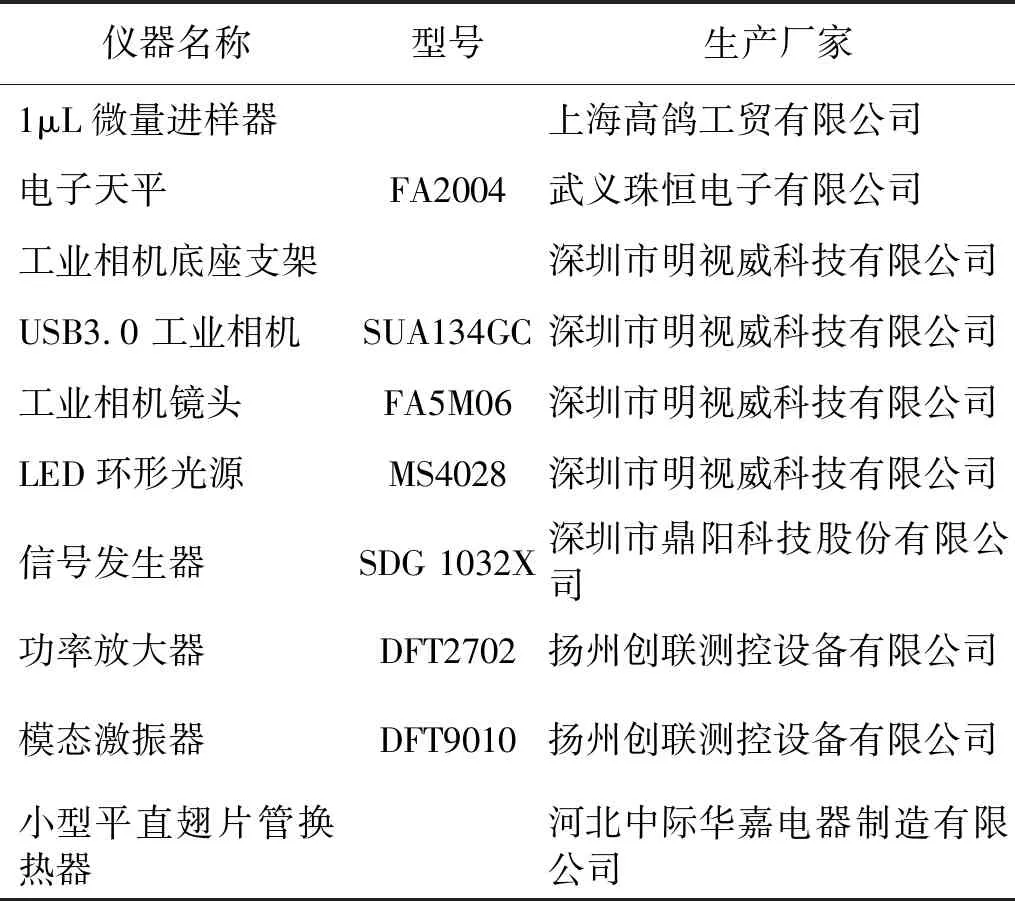
表4 主要仪器与生产厂家
为了验证采用数值模拟方法的可靠性,在进行试验之前进行了一组数值模拟研究,参数设置如表5所示。

表5 数值模拟参数
在开始试验之前需要对小型平直翅片管换热器的表面进行处理,使用疏水涂层Glaco Soft 99均匀喷涂并干燥表面,使用微量进液器吸取一定量液滴观察其壁面接触角,直至与本文数值模拟设置的接触角相同。然后将小型平直翅片管换热器固定在支撑平板上;连接信号发生器、功率放大器和激振器;通过螺栓将激振器安装在基座上,通过螺母将激振器顶杆与小型平直翅片管换热器支撑平板相连。
将环形光源安装固定在工业相机镜头位置,然后将工业相机连同镜头安装与万向支架上;调整万向支架夹头使工业相机镜头位置正对平直翅片管换热器顶部;通过数据线缆将工业相机与计算机相连,运行计算机上安装的与工业相机配套的SDK软件;使用微量进液器吸取0.11 μL的蒸馏水放置于平直翅片管翅片间隙内的基管上产生微液滴,在计算机上观察微液滴的位置和大小,并等待液滴稳定下来。
设定工业相机拍照速度为100 FPS,调整工业相机采样周期设为1 ms,曝光时间为5 ms,打开激振系统,操作信号发生器设置频率f=40 Hz,振幅A=0.5 mm的正弦周期性振动;如果拍摄图片效果不理想,重复上述步骤,直至获得满意结果。
对拍摄之后的图片进行处理,对微液滴不同时刻的位置进行测量,得到微液滴不同时刻在y方向的重心坐标数据,与使用相同参数进行数值模拟计算所得结果的对比如图6所示,结果发现微液滴运动轨迹基本一致。
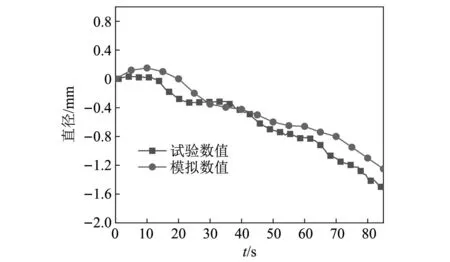
图6 微液滴位置的试验与数值模拟对比Fig.6 Comparison between test and numerical simulation of microdroplet position
2.2.2 数值模拟结果分析
图7为在30 Hz水平正弦周期性振动作用下不同体积微液滴在y方向上运动位移,图7中可以看出体积分别为3.7×10-11m3、5.7×10-11m3、7.5×10-11m3、1.1×10-10m3的微液滴在基管正弦振动的第一个周期内运动状态都近似正弦运动,但微液滴运动轨迹的波峰整体随着微液滴体积的增加而降低,分别为0.22 mm、0.16 mm、0.15 mm、0.04 mm。
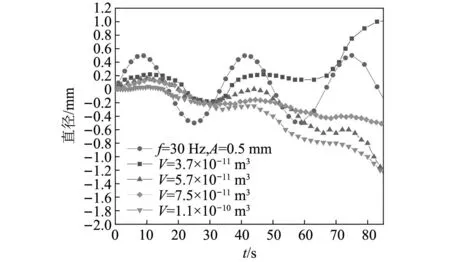
图7 振动频率f=30 Hz,振幅A=0.5 mm,不同体积微液滴运动状态对比Fig.7 Comparison of motion states of microdroplets with different volumes, vibration frequency f=30 Hz, amplitude A=0.5 mm
在第二个运动周期内,未脱离微液滴滑落的极限位置时,体积越小的微液滴受到的振动的影响越明显,在第43 ms左右体积为3.7×10-11m3的微液滴开始脱离平衡位置不断向y正方向滑落,并且在随后的运动过程中基管的振动不能使微液滴回到平衡位置。体积越大的微液滴质量越大,在滑落的过程中,受到重力的影响越大,而体积为7.5×10-11m3的微液滴整体运动速度反而比5.7×10-11m3的微液滴慢,经过分析后认为原因是随着体积的增加,微液滴在运动过程中与翅片壁面发生接触,接触面积增大,摩擦阻力增加,而此时摩擦阻力对微液滴运动的影响更大。
体积分别为3.7×10-11m3、5.7×10-11m3、7.5×10-11m3、1.1×10-10m3的微液滴在基管40 Hz水平周期性正弦振动作用下y方向运动轨迹如图8所示,从图8中可以看出体积为3.7×10-11m3的微液滴发生在y方向上的来回振荡,没有发生滑落现象,经过分析后认为是,由于微液滴自身存在惯性并且受力之后发生弹性形变,管外壁振动通过摩擦力作用于微液滴,之后微液滴的运动响应有一段时间的延迟,当微液滴运动到y负方向的最远距离时,基管壁面的振动给微液滴提供y轴正方向的摩擦力,当微液滴运动到y正方向的最远距离时,基管壁面的振动给微液滴提供y轴负方向的摩擦力,所以微液滴的运动达到了相对平衡的状态,很难在振动的作用下从管壁滑落。体积为5.7×10-11m3、7.5×10-11m3、1.1×10-10m3的微液滴运动状态与30 Hz振动条件下基本相同,其中1.1×10-10m3的微液滴滑落速度比7.5×10-11m3的微液滴快,比 5.7×10-11m3的微液滴慢,经过分析后认为,微液滴体积越大,滑落过程中的速度越快,然而1.1×10-10m3和7.5×10-11m3的微液滴在运动过程中与翅片壁面相碰,吸附在翅片壁面上之后受到的摩擦力增大,所以滑落速度比5.7×10-11m3的微液滴慢。
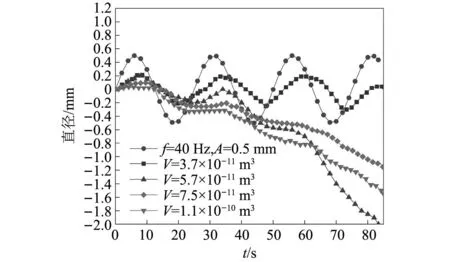
图8 振动频率f=40 Hz,振幅A=0.5 mm,不同体积微液滴运动状态对比Fig.8 Comparison of motion states of microdroplets with different volumes, vibration frequency f=40 Hz, amplitude A=0.5 mm
图9为50 Hz正弦周期性振动作用下体积分别为3.7×10-11m3、5.7×10-11m3、7.5×10-11m3、1.1×10-10m3微液滴在y方向上的运动轨迹,与30 Hz、40 Hz正弦周期性振动得到的结果相比,体积较小的微液滴在y方向上运动轨迹的波峰和波谷受振动的影响更加明显,微液滴在基管振动的作用下发生往复运动不易滑落,而体积越大的微液滴滑落速度越快,说明在50 Hz振动作用下,微液滴滑落过程中,重力的影响更加明显。经过分析后认为,微液滴体积较小时,振动初始阶段,其惯性力和静摩擦力与振动产生的动摩擦力维持相对平衡,液滴进行往复运动,随着时间的推移,微液滴受到振动的影响越来越明显,在第67 ms左右体积为3.7×10-11m3的微液滴开始脱离平衡位置,并无法回到初始极限位置,在76 ms左右之后,不断向y正方向滑落。微液滴在滑落的过程中受到自身重力和摩擦力的共同作用,观察曲线斜率可以发现,在振动方向与液滴运动方向相反时,微液滴速度降低,与液滴运动方向相同时,微液滴速度增加。
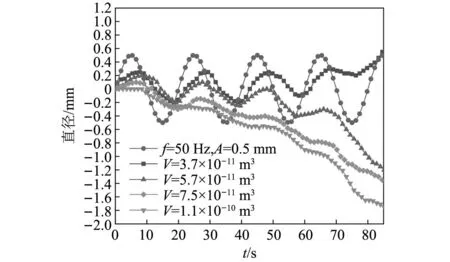
图9 振动频率f=50 Hz,振幅A=0.5 mm,不同体积微液滴运动状态对比Fig.9 Comparison of motion states of microdroplets with different volumes, vibration frequency f=50 Hz, amplitude A=0.5 mm.
3 结 论
本文对平直翅片管换热器结霜初期微液滴的生长进行了数值模拟并通过文献值进行验证,之后研究了不同体积微液滴在基管振动频率下的运动状态,最后搭建试验平台进行了验证,通过对研究结果进行分析,得到了以下结论:
(1) 平直翅片管换热器结霜初期,其基管处的微液滴滑落过程受到重力和摩擦力的共同作用,施加机械振动可以加速微液滴的滑落过程,进而加速冷凝微液滴的排出,减少平直翅片管结霜初期的液滴积累,以起到抑制霜层生长的目的。
(2) 体积较大的微液滴在平直翅片管基管上运动的过程中更容易与翅片壁面发生碰撞,微液滴体积越大,其与翅片壁面的接触面积增加,使得下落时的壁面摩擦力增大。
(3) 体积较大的微液滴惯性较大,在滑落过程中更容易克服摩擦力的影响,利用更高的振动频率可以加速液滴的滑落过程;体积较小的微液滴运动过程中容易受到壁面摩擦力的影响,较小的振动频率作用下的滑落速度更快。
猜你喜欢
高校化学工程学报(2020年2期)2020-06-10
原子能科学技术(2020年1期)2020-03-30
制冷(2019年2期)2019-12-09
意林(绘英语)(2017年12期)2017-05-14
制冷技术(2016年3期)2016-12-01
天津城建大学学报(2015年5期)2015-12-09
制冷学报(2014年1期)2014-03-01
制冷学报(2014年1期)2014-03-01
河南科技(2014年18期)2014-02-27
河南科技(2014年8期)2014-02-27