
大型水利阀门轴承外圈断裂智能视觉监测方法
2024-04-27 06:54周锦珂
自动化与仪表 2024年4期
李 飞,周锦珂
(河北工程大学 水利水电学院,邯郸 056038)
阀门的轴承外圈是整个阀门的直接承载区域,受到温度、承载量和冲击力等多种因素的影响较大[1]。近年来,经常遇到大型水利阀门实际运行中发生阀门轴承外圈断裂的情况,这主要是由于重载高温和重冲击所导致的。轴承外圈断裂直接导致了轴承的失效,给水利工程的建设造成了致命的损害。传统的轴承外圈断裂状态监测方法难以实现高精度的监测,并且缺乏时效性[2-5]。因此,亟需对大型水利阀门轴承外圈断裂失效状态的监测方法展开研究。
因为水利阀门轴承外圈无法安装传感设备,其断裂缺少明确的传感阈值信号,无法通过实时传感信号完成检测。以智能图像为基础的故障识别算法受困于外圈的边缘特征提取不完整的弊端,准确性不高。为此,本文提出大型水利阀门轴承外圈断裂失效状态自动化监测方法。
1 轴承外圈像素的缺失值填补
由于大型水利阀门轴承外圈边缘图像像素分布具有周期性、空间相关性和时序性,存在不可避免的像素提取缺失问题,因此与基于多维张量数据的张量核范数[6]存在较强的关联性。同时,随着规律性的减弱,张量核范数也会增加。因此,对大型水利阀门轴承外圈像素进行缺失值填补时,选择了低秩张量补全法(LRTC)[7]。建立低秩张量补全模型如下:
式中:C 为需要补全的阀门轴承外圈像素;Q 为原始的阀门轴承外圈像素;‖·‖TNN为张量核范数;AX(·)为采集轴承外圈像素的操作符号;X 为未缺失的轴承外圈像素集合,若张量像素存在于集合X 中,则该张量像素保持原值,若张量像素不在集合X 中,则将该张量像素的值取0。
选择一个辅助变量X=C 来建立增广拉格朗日函数[8],增广拉格朗日函数Z(C,X,W)的定义如下:
式中:W 为拉格朗日乘子;χ 为平衡参数;zX(·)为指数函数,当阀门轴承外圈像素存在于集合X 中,且该像素的值等于Q 中对应位置的像素值时,zX(·)取0,否则zX(·)为无穷大;〈·〉为张量内积;‖·‖G为张量G 范数。基于交替方向乘子法定义,可对C、X、W展开交替优化处理,以获得其值,具体过程如下:
式中:l 为迭代次数;U 为由实际的阀门轴承外圈像素集构成的观察张量;利用C∶U=AX(C)可以令C 符合未缺失的轴承外圈像素与实际观察到的像素大小相同。
对C、X 和W 展开持续求解,直到C 不变时,表明获得了C 对应的张量核范数最小值,此时所有缺失的阀门轴承外圈运行像素已得到填补[9]。插补前后,时域波形图像数据对比如图1 所示。
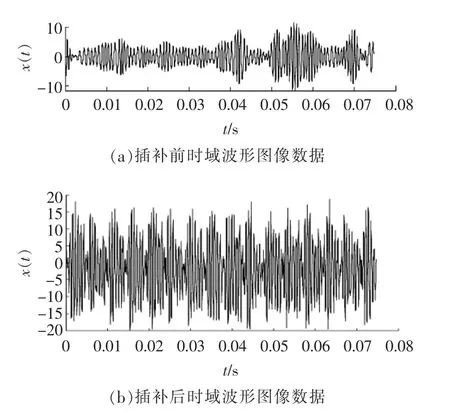
图1 插补前后时域波形图像数据对比Fig.1 Comparison of time-domain waveform image data before and after interpolation
通过对比可以看出,插补后的图像数据明显增加,修补效果明显。
2 轴承外圈像素特征提取以及断裂状态监测
2.1 基于编码器的外圈断裂像素特征提取
针对上述填补后的阀门轴承外圈像素,利用自编码[10]的方法展开断裂特征提取,自编码网络的工作原理可参考图2。
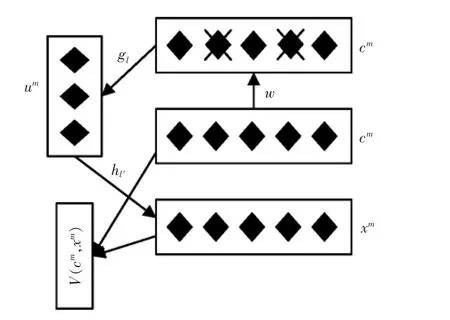
图2 降噪自编码工作原理Fig.2 Working principle of noise reduction and self coding
自编码网络分为编码网络和解码网络,先按照某一概率将网络输入层节点的值设置为0,此时能够获得存在阀门轴承外圈像素;其次对阀门轴承外圈像素展开编码;最后利用解码网络获得初始轴承外圈像素特征,以此降低自编码网络对于微小噪声的敏感程度。因此,自编码网络能够降低环境中存在的噪声等因素对轴承外圈运行像素特征提取的影响,提高特征提取精度。
定义{c1,…,cm,…,cM}是缺失值填补后的阀门轴承外圈像素集,其中的m 指第m 个像素,M 为训练像素的总数量,将{c1,…,cm,…,cM}输入到自编码网络中,得到输出的阀门轴承外圈像素集为{x1,…,xm,…,xM},则自编码网络的损失函数V(cm,xm)定义如下:
在自编码网络展开特征提取的过程中,当前层输入的像素是上一层编码后的像素,第一层的像素即为原始输入的轴承外圈像素,则编码层的输出像素um定义如下:
通过自编码网络展开解码,能够获得和目标特征类似的初始轴承外圈像素断裂特征xm,xm的定义如下:
式中:hτ′和dh分别为解码层的参数集合和响应函数,且τ′={E′,f},E′为该层的连接权值,f 为该层的偏置参数[11-12]。
2.2 断裂失效特征的智能监测方法设计
基于2.1 中提取到的阀门轴承外圈运行断裂特征,利用支持向量机[13]算法对轴承外圈断裂失效状态展开智能监测。
为了提高状态监测的精度,定义ψi>0 为松弛因子,其中i=1,2,…,n,将ψi>0 加入式(8),可获得改进后的目标函数和约束条件如下:
式中:B 为惩罚因子,对B值展开调整能够降低算法难度并提高监测精度。
由于式(8)属于二次规划问题[14],因而可将拉格朗日函数的鞍点N(e,β,δ)作为式(8)的解,拉格朗日函数的鞍点定义如下:
式中:βi和δi表示拉格朗日算子,且βi,δi>0。
基于Kuhn-Tucker-Tucker 定理的规定[15],式(8)的最优解需要符合如下要求:
此时,通过解决二次规划问题可以获得超平面参数的解,具体过程如下:
式中:R 为二次规划参数,通过式(11)能够获取βi的值,多数βi值取零,少数βi>0 相对的轴承外圈断裂特征表示支持向量。通过一个支持向量和相对的拉格朗日算子βl能够获得偏置向量r。断裂特征xm的判别函数t(xm)定义如下:
式中:sign(·)表示符号函数;根据xm值大小可判断t(xm)值,当xm>0 时,t(xm)=1,当xm<0 时,t(xm)=-1。因为特征对应的状态类别oi∈{+1,-1},因此当判别函数t(xm)=1 时,表明oi=1,此时阀门轴承外圈属于正常运行状态;当t(xm)=-1 时,表明oi=-1,此时阀门轴承外圈属于断裂失效状态,以此完成轴承外圈断裂失效状态的智能监测。
3 实验与分析
为了验证大型水利阀门轴承外圈断裂失效状态智能图像监测方法,需要对其展开测试。本实验主要由两部分组成,一部分是成像环境,另一部分是工业测试软件。成像环境由光源、灯箱和摄像机组成,通过摄像机的USB 连接线,连接到计算机。通过本文的方法进行像素插补对比,通过光源干扰,造成采集中的边缘像素缺失,再利用插补方法完成像素插补,结果如图3 所示。
通过对比可以看出,利用本文方法填补缺失像素,效果良好。
3.1 特征提取
大型水利阀门轴承外圈断裂区域的特征提取结果直接影响着后续失效状态监测精度,因此选取一组发生外圈断裂故障的阀门轴承数据,利用本文方法对4 种断裂特征提取(剥离断裂、烧伤断裂、擦伤断裂、腐蚀断裂),如图4 所示。

图4 型水利阀门轴承外圈不同断裂特征Fig.4 Different fracture characteristics of the outer ring of the bearing of a water conservancy valve
将4 种不同断裂特征像素频域的幅值随频率变化的情况绘制成如图5 所示的频谱图。
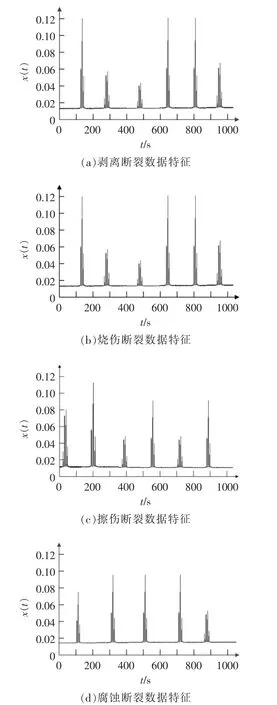
图5 外圈断裂特征提取效果Fig.5 Feature extraction effects of different methods
根据图5 可知阀门轴承外圈断裂故障的实际像素分布特征,其中的峰值即为外圈断裂故障,利用所提方法提取到的外圈断裂故障特征具有明显的阈值属性,因此,本文方法对阀门轴承外圈断裂故障的特征提取效果良好。
3.2 识别错分率
错分率是用来判断支持向量机分类性能的指标,错分率越低,表明支持向量机的分类性能越好,即支持向量机识别轴承外圈断裂失效状态的精度越高。错分率的定义如下:
式中:ui为状态监测结果的真实值为利用支持向量机监测到的预测值;f 为预测的阀门轴承外圈数据量。为了进一步判断大型水利阀门轴承外圈断裂失效状态自动化监测方法对阀门轴承外圈断裂失效状态的监测精度,现利用式(13)对该方法中的支持向量机监测结果的错分率展开计算,错分率随监测数据量的变化情况如图6 所示。
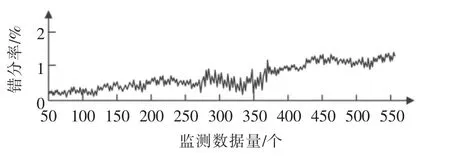
图6 错分率变化情况Fig.6 Changes in misclassification rate
由图6 可以推出,随着监测的阀门轴承外圈运行数据的增加,所提方法的错分率会有所上升,但错分率整体变化幅度较小,且最大错分率不超过2%,表明所提方法利用到的支持向量机稳定性较强,展开断裂失效状态监测的精度较高。
4 结语
为了降低大型水利阀门的故障发生率,需要对阀门轴承外圈的断裂失效状态展开监测,目前阀门轴承外圈断裂的失效状态监测方法存在轴承图像特征提取效果差、断裂位置的识别误差大以及失效状态监测精度低等问题。为解决上述问题,提出了一种大型水利阀门轴承外圈断裂失效状态智能图像监测的方法,该方法先对缺失的阀门轴承外圈像素展开填补,然后对填补后的数据进行特征提取,最后利用支持向量机实现断裂失效状态的图像监测。经验证,该方法有效提高了特征提取效果和状态监测精度。
猜你喜欢
哈尔滨轴承(2022年1期)2022-05-23
河南化工(2021年3期)2021-04-16
数学物理学报(2021年1期)2021-03-29
五邑大学学报(自然科学版)(2020年4期)2020-12-09
哈尔滨轴承(2020年2期)2020-11-06
湖南教育·C版(2017年12期)2018-01-03
读写算·高年级(2017年6期)2017-06-27
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
读写算·高年级(2015年7期)2015-07-12
河南科技(2014年19期)2014-02-27
