基于改进YOLOv5的草莓病害识别
2024-04-27 04:01邱畅田光兆赵嘉威谢尚杰郑奎
中国农机化学报 2024年3期
邱畅 田光兆 赵嘉威 谢尚杰 郑奎
摘要:為提高草莓的总产量,合理监控和防治草莓病害是有效的手段,提出一种基于改进YOLOv5的草莓病害识别算法。该检测算法以CSPDarknet作为主干特征提取网络,能够有效提高模型的性能和训练效率,并使用EIOU Loss损失函数与K-means聚类算法,来提高模型的收敛速度。同时,在模型中增加CBAM注意力机制来提高检测精度,最终构建基于改进YOLOv5的CBAM-YOLOv5l算法。试验结果表明,改进后的模型较之原始模型,在检测精度上有所提升且依然能保证高效的检测速度。另外,经过训练的CBAM-YOLOv5l目标检测算法在验证集下的总体平均精度达到96.52%,平均检测时间为27.52 ms,对比YOLOv4、YOLOv4-Tiny、Faster_R-CNN等目标检测算法,该检测算法在精度上具有更大的优势,在实际的草莓果园环境中具有良好的鲁棒性与实时性,可以满足草莓病害识别精度的需求,能够可靠地提示草莓健康状态,从而及时地实现精准施药等保护措施。
关键词:草莓;YOLOv5;机器视觉;深度学习;病害识别
中图分类号:S436.5 文献标识码:A 文章编号:2095-5553 (2024) 03-0198-07
Strawberry disease identification based on improved YOLOv5
Qiu Chang1, Tian Guangzhao2, Zhao Jiawei2, Xie Shangjie2, Zheng Kui3
(1. College of Artificial Intelligence, Nanjing Agricultural University, Nanjing, 210031, China; 2. College ofEngineering, Nanjing Agricultural University, Nanjing, 210031, China; 3. Shunwei Intelligent Technology
(Changzhou) Co., Ltd., Changzhou, 213161, China)
Abstract:
In order to improve the total yield of strawberries, reasonable monitoring and control of strawberry diseases is an effective means, a strawberry disease identification algorithm based on improved YOLOv5 is proposed. The detection algorithm uses CSPDarknet as the backbone feature extraction network, which can effectively improve the performance and training efficiency of the model. The EIOU loss function and K-means clustering algorithm are used to improve the convergence speed of the model. At the same time, CBAM attention mechanism is added to the model to improve the detection accuracy, and finally the CBAM-YOLOv5l algorithm based on improved YOLOv5 is constructed. The experimental results show that the improved model improves the detection accuracy and still ensures efficient detection speed compared to the original model. In addition, the trained CBAM-YOLOv5l target detection algorithm achieves an overall average accuracy of 96.52% under the validation set, with an average detection time of 27.52 ms. Compared with YOLOv4, YOLOv4-Tiny, Faster_R-CNN and other target detection algorithms, CBAM-YOLOv5l algorithm has greater advantages in accuracy. It has good robustness and real-time performance in the actual strawberry orchard environment, and it can meet the needs of strawberry disease identification accuracy and reliably prompt the health status of strawberries, so as to timely achieve precise pesticide application and other protection measures.
Keywords:
strawberry; YOLOv5; machine vision; deep learning; disease recognition
0 引言
我国是草莓生产消费第一大国,草莓种植业为我国农业发展的重点之一[1]。合理监控和防治草莓病害是提高草莓总产量的有效手段,但国内对草莓病害的识别仍依赖于专业的检测人员,耗费大量劳动力且效率不高。
目前,国内外对作物病害识别已展开广泛的研究。陈欣欣等[2]利用热红外成像技术和模拟低空遥感技术对油菜菌核病进行识别检测,从热红外图像、温度、生理指数等不同维度实现油菜菌核病的早期识别。康丽等[3]利用高光谱成像技术,结合主成分分析和竞争性自适应重加权算法,实现对大田自然发病的稻瘟病早期分级检测。宋英等[4]利用小麦生长过程中赤霉病发病前期和发病中期的RGB图像,得到与赤霉病相关性最好的颜色特征指数,再将发病麦穗颜色特征指数值与健康麦穗进行比较分析,实现了利用数字图像颜色特征指数快速地识别小麦赤霉病。Bian等[5]提出基于评价机制的自适应K-means算法,并将该算法的核心步骤改写成Mapper/Reducer的形式,部署在Hadoop集群中,能够批量地对柑橘红蜘蛛图像目标进行识别。然而,上述方法仅适用于某种作物的单种病害的识别,无法对作物可能存在的多种病害进行识别,在实际生产中难以获得广泛的应用。
近年来,深度卷积神经网络在目标检测中展现出极大的优势,能够快速精准地完成检测任务,使自然环境中作物的多种病害同时识别成为可能[6]。对于草莓多种病害的识别,也已有了较多实践。邱菊等[7]基于YOLOv5s网络建立了草莓病害识别系统,对草莓病害的识别有较高的效率。Kim等[8]使用PlantNet为主干特征提取器,可以很好地捕获植物域信息。Ma等[9]使用一种基于深度卷积神经网络的草莓病害识别方法,并应用到迁移学习,能有效解决关键特征区域信息丢失的问题。但这些方法在草莓病害的检测中,不能够同时拥有较高的精度与速度。因此本研究针对草莓病害中最常见的细菌性叶斑病、炭疽病、灰霉病、蛇眼病和白粉病[10],构建基于改进YOLOv5的CBAM-YOLOv5l模型。
1 数据集与预处理
1.1 数据采集
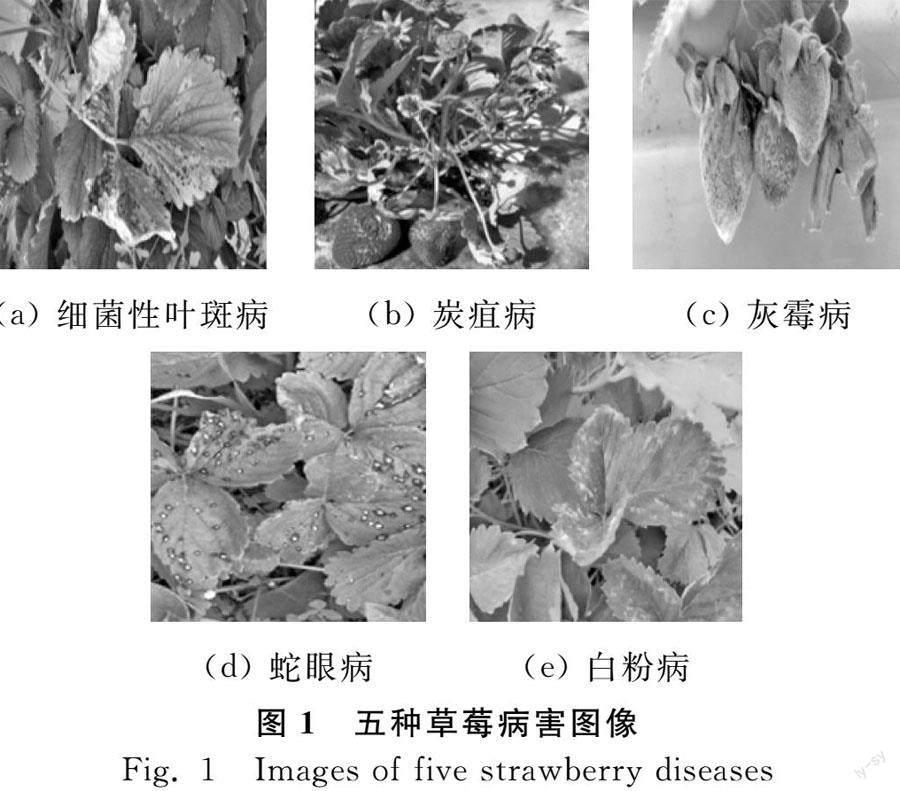
本文所用的草莓图像皆为互联网上爬取所得,图片统一以.jpg的格式进行保存。本研究对草莓生长中最常见的细菌性叶斑病、炭疽病、灰霉病、蛇眼病和白粉病进行识别,其中针对草莓叶部的病害为细菌性叶斑病、蛇眼病和白粉病,针对草莓果实上的病害为炭疽病和灰霉病。草莓病害图像如图1所示。
1.2 数据预处理
训练模型采用PASCAL VOC的数据集格式,使用LabelImg软件对目标进行标注,最终获取含有2500张图片的原始数据集。各种病害图像各有500张。细菌性叶斑病标注为Angular_Leafspot,炭疽病标注为Anthracnose_Fruit_Rot,灰霉病标注为Gray_Mold,蛇眼病标注为Leaf_Spot,白粉病标注为Powdery_Mildew。
为防止因数据集的数据量过少导致网络模型出现过拟合的情况[11],同时为增强模型训练效果及模型泛化能力[12],本研究利用上述获得的2 500张图像,随机进行镜像反转、增加噪声、平移等操作,使其扩充至7 500张。完成数据扩增后,按照9∶1的比例將其随机地划分为训练集(6 750张)和验证集(750张)。
2 YOLOv5算法与改进
2.1 YOLOv5l目标检测网络
在2016年,Redmon等提出了单阶段的基于深度学习的目标检测算法,该算法采用回归的方法直接进行目标的分类与预测[13]。YOLOv5是YOLO系列的第五代算法,按照模型大小递增可分为s、m、l、x,各模型仅在网络的深度和宽度上有所不同[14],本研究选用的是YOLOv5l,能够同时保证较高的识别精度与检测速度。
2.1.1 YOLOv5l网络结构
YOLOv5l的主干特征提取网络为CSPDarknet,该网络通过对输入的图像进行多次的卷积来提取图像特征,最终获得三个大小分别为80×80×256、40×40×512、20×20×1024的有效特征层。特别地,大小为20×20×1024的最后一个有效特征层经过了SPP网络的处理。不同于YOLOv4将SPP网络用于加强特征提取网络,在YOLOv5中,SPP模块被用在了主干特征提取网络中。SPP网络对传入的特征层分别利用四个不同池化核大小的最大池化进行特征提取,这样能提高网络的感受野,分离出最显著的上下文特征,再将获得的特征层传入特征提取网络FPN中。传入FPN网络的特征层先经过两次上采样分别与对应大小的有效特征层进行堆叠,再进行两次下采样,利用反复的特征提取来获得更好的特征,最后传入YOLO Head进行预测[15]。
2.1.2 残差网络与CSP网络
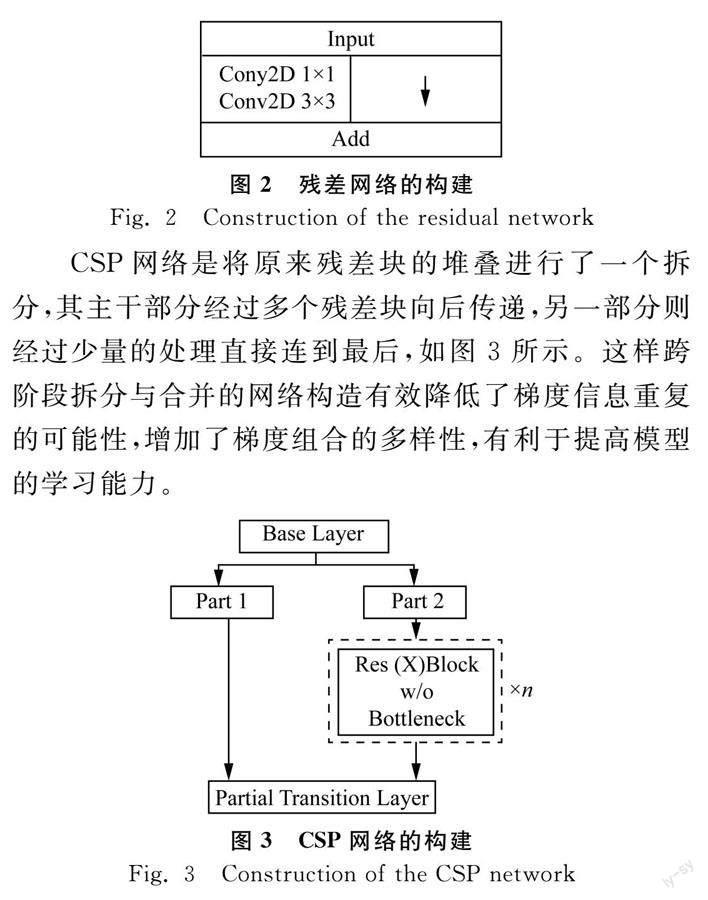
YOLOv5l的主干部分中运用到残差卷积,残差卷积由两部分构成,第一部分是一次1×1的卷积和一次3×3的卷积,第二部分是将输入与输出直接结合的残差边部分,如图2所示。该残差网络的特点是内部的残差块使用了跳跃连接,使得当残差为0时,该层神经元只是对上一层进行一次线性堆叠,网络性能并不会下降。这缓解了在深度神经网络中增加深度带来的梯度消失问题。
CSP网络是将原来残差块的堆叠进行了一个拆分,其主干部分经过多个残差块向后传递,另一部分则经过少量的处理直接连到最后,如图3所示。这样跨阶段拆分与合并的网络构造有效降低了梯度信息重复的可能性,增加了梯度组合的多样性,有利于提高模型的学习能力。
2.1.3 Focus网络结构
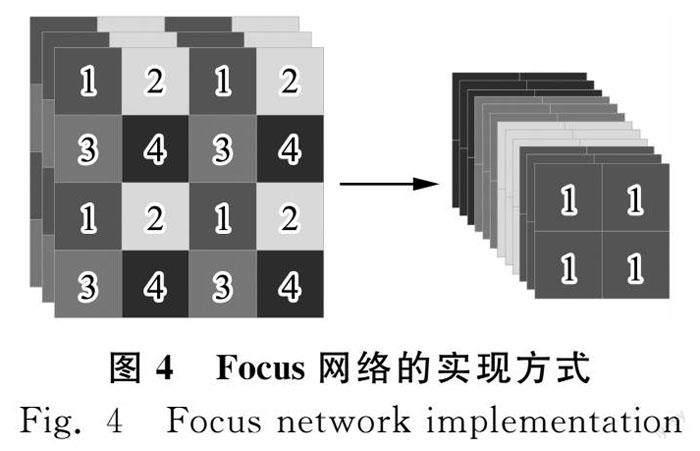
Focus网络实现的具体操作如下:首先,在一张图片中每隔一个像素拿到一个值,获得四个独立的特征层;然后,将这四个独立的特征层进行堆叠。此时,宽高维度上的信息就集中到了通道维度的信息上,使得输入通道扩充了四倍,拼接起来的特征层相对于原先的三个通道变成了十二个通道;最后,通过卷积的办法提取不同的特征。Focus网络的实现方式如图4所示。
2.2 YOLOv5l网络改进
2.2.1 CBMA注意力机制
注意力机制就是实现网络自适应注意的一个方式,其核心重点就是让网络关注到更需要关注的地方[16]。注意力机制一般分为通道注意力机制和空间注意力机制,本文使用的CBAM[17]注意力机制是将通道注意力机制和空间注意力机制进行了结合,即CBAM将对输入的特征层分别进行通道注意力机制和空间注意力机制的处理。这样不只能够节约参数和计算力,并且保证了其能够作为即插即用的模块集成到现有的网络架构中去。关于通道注意力机制和空间注意力机制的具体实现过程如下。
1) 通道注意力机制先对输入特征层进行全局平均池化,然后进行两次全连接,再取一次Sigmoid将值固定到0~1之间,此时能够获得输入特征层每一个通道的权值,最后将这个权值乘上原输入特征层即可。
2) 空间注意力机制对输入进来的特征层,在每一个特征点的通道上取最大值和平均值并将两个值进行一次堆叠,利用一次通道数为1的卷积调整通道数,然后取一个Sigmoid将值固定到0~1之间,此时能够获得输入特征层每一个通道的权值,最后将这个权值乘上原输入特征层即可。
因此,将通道注意力机制与空间注意力机制结合的CBAM注意力机制的结构如图5所示。
2.2.2 EIOU Loss损失函数
本文使用EIOU Loss损失函数,EIOU[18]是在CIOU的基础上将纵横比拆开,并加入Focal聚焦优质的锚框后得到的。其实现原理如式(1)所示。
LossEIOU=LossIOU+Lossdis+Lossasp=1-IOU+ρ2(b,bgt)c2+ρ2(ω,ωgt)CW2+ρ2(h,hgt)Ch2(1)
式中:LossEIOU——预测框和真实框的重叠损失;Lossdis——预测框和真实框的中心距离损失;Lossasp——预测框和真实框的宽和高损失;LOSSIOU——预测框和真实框的重叠损失;LOSSdis——预测框和真实框的中心距离损失;LOSSasp——预测框和真实框的宽和高损失;IOU——预测框与真实框的交并比;ρ2——加权系数;b——预测框的水平中心点位置;bgt——真实框的水平中心点位置;ω——预测框的宽度;ωgt——真实框的宽度;h——预测框的高度;hgt——真实框的高度;c——用于调整水平距离损失的系数;Cw——覆盖预测框和真实框的最小外接框的宽度;Ch——覆盖预测框和真实框的最小外接框的高度。
EIOU损失函数的前两部分延续CIOU函数中的方法,增加的宽和高损失直接使预测框与真实框的宽度和高度之差最小,使得收敛速度更快。同时,引入了Focal Loss优化了边界框回归任务中的样本不平衡问题,使预测框回归过程专注于高质量锚框。
2.2.3 K-means聚类算法
本研究选择K-means聚类[19]算法,该算法是无监督的聚类算法,具有收敛速度快、聚类效果较优和参数只有簇数K的特点。
其具体实现过程是,先从样本集中隨机选取K个样本作为簇中心,并计算所有样本与这K个“簇中心”的距离,对于每一个样本,将其划分到预期距离最近的“簇中心”所在的簇中。然后针对每个簇,重新计算聚类中心,接着针对每个样本重新寻找距离自己最近的中心点并进行类的划分,如此循环直至各个簇的中心点不再发生变化为止。最终9个聚类中心先验框的尺寸为(10,13)、(16,30)、(33,23)、(30,61)、(62,45)、(59,119)、(116,90)、(156,198)、(373,326)。
2.2.4 改进YOLOv5l网络模型
改进后的YOLOv5l网络模型如图6所示,最明显的改进就是在主干特征提取网络和加强特征提取网络之间及上采样的特征融合前添加CBAM模块,使得网络能更加关注到需要关注的地方,提高预测准确率。对于损失函数的改进则是使用了收敛速度更快的EIOU损失函数,优化了样本不平衡问题。同时采用K-means聚类算法,获得聚类效果较优的先验框。
3 结果与分析
3.1 试验平台与训练结果
本文的深度学习环境的具体配置为:CPU为Intel Corei5;运行内存为16 G;500 G固态硬盘;11 GB的NVIDIA GeForce GTX 1080Ti GPU;操作系统为Ubuntu18.04;CUDA与Cudnn版本分别是10.0与7.6.5。
试验中使用Precision-Recall曲线、AP值(检测精度)、MAP(AP值在所有类别下的均值,本研究共分为五种类别)与检测速度作为评价指标。其中,AP值即为P-R曲线与坐标轴围成区域面积,MAP是所有类的AP平均值[20]。
在网络训练完成后,网络最终选定的预测框可能出现以下三种情况:第一种情况是预测框命中了真实的目标框,该种情况存在的数量用TP表示;第二种情况是预测框没有命中真实的目标框,该种情况存在的数量用FP表示;第三种情况是真实目标区域没有预测框,该种情况存在的数量用FN表示[21]。P、R、AP与MAP值的计算如式(2)~式(5)所示。
P=TPTP+FP×100%(2)
R=TPTP+FN×100%(3)
AP=∫10P(R)dR×100%(4)
MAP=∑5n=1AP(n)5×100%(5)
式中: n——病里种类。
模型训练后的损失曲线如图7所示。模型设置迭代总次数为1000次,而模型的损失值在迭代第100次时就逐渐趋于稳定,说明网络在此时已经拟合,且训练的效果良好。
3.2 CBAM-YOLOv5l网络的检测结果
3.2.1 改进后网络模型的训练结果对比
本文提出CBAM-YOLOv5l算法,主要改进是在原始YOLOv5l算法添加CBAM注意力机制。为了验证算法改进后的可行性,设计消融实验进行结果对比[22]。不同网络模型训练后的结果如表1所示,CBAM-YOLOv5l算法的MAP为96.52%,与原始YOLOv5l算法相比提高了2.46个百分点,同时CBAM-YOLOv5l算法的检测速率为27.52 ms,也只比改进前降低2.22 ms,依旧能够满足高效的检测速率要求。因此,本文对网络模型的改进可以同时满足精度与速度的需求。
3.2.2 不同网络模型的训练结果对比
CBAM-YOLOv5l模型与其他模型在验证集上对不同草莓病害检测的试验结果如表2所示。从表2可知,CBAM-YOLOv5l模型在检测中的总体平均正确率比YOLOv4、YOLOv4-Tiny、Faster_R-CNN分别高了4.46个、5.40个、2.86个百分点,且检测速率也较高。尽管YOLOv4-Tiny模型的檢测速度最快,但其检测精度最差,而Faster_R-CNN的检测精度较高但其检测速度最慢。因此,相较而言,CBAM-YOLOv5l模型在精度与速度上都最能满足病害检测的需要。
可以发现所有模型对炭疽病检测的平均精度最高,可能是因为炭疽病的颜色与各阶段草莓果实的颜色都有很大差异,使得该种病症呈现的颜色特征明显;而各模型对白粉病的检测平均精度最低,可能是因为白粉病的颜色特征较不明显,特别是草莓叶片背面为淡绿色,使得白粉病出现在叶片背面时与叶片背面的颜色相近,所以较难辨别此时的叶片是否患病。但是,本文CBAM-YOLOv5l模型对白粉病的检测精度达92.5%,可以满足现实中对该病害检测的需要。
为验证本模型在实际环境中对草莓病害检测的准确性和快速性,特别地,将几种病害的图片进行拼接,即在同一个图像中同时出现多种病害,以此模拟现实中同一棵草莓植株可能同时存在的多种病害。如图8所示为不同目标检测模型对两张拼接后的草莓图像进行病害检测的试验结果。从图8可以直观地发现,YOLOv4-Tiny和YOLOv4模型的检测精度都不高且极容易出现漏检现象;而Faster_R-CNN模型的检测精度较高但还是容易出现漏检误检的情况。因此相比于其他模型,CBAM-YOLOv5l模型的检测精度较高且能够极大地避免其他模型存在的漏检、错检的情况,同时该模型的检测速度也存在很大的优势,平均检测时间为27.52 ms,说明该模型具有更强的鲁棒性与实时性,能够满足实际复杂环境下对草莓病害检测的需要。
4 结论
1) 本文提出一种改进的CBAM-YOLOv5l的目标检测算法,用于草莓病害的检测。在YOLOv5l网络中融合了CBAM注意力机制,同时保证了草莓病害的检测精度和检测速率。
2) 该方法在验证集下的总体平均正确率达到96.52%,平均检测速度达到27.52 ms。对比改进前后的模型可知,改进后模型的总体平均正确率比原来的模型提高了2.46个百分点,检测速度也依然能得到保证,说明改进后的模型满足在实际环境中对草莓病害的检测。
3) 为验证本模型在实际环境中的检测效果,将两张拼接后的图像输入不同模型分别对草莓病害作了检测。试验结果表明,CBAM-YOLOv5l模型相比于YOLOv4、YOLOv4-Tiny、Faster_R-CNN模型,检测精度分别高了4.46个、5.40个、2.86个百分点,同时该模型能极大地避免其他模型存在的漏检、错检的情况,能够最有效地对草莓病害作出检测。
参 考 文 献
[1]张晓慧. 草莓病害研究进展[J]. 安徽农学通报, 2018, 24(18): 52-57.Zhang Xiaohui. Research progress of strawberry diseases [J]. Anhui Agricultural Science Bulletin, 2018, 24(18): 52-57.
[2]陈欣欣, 刘子毅, 吕美巧, 等. 基于热红外成像技术的油菜菌核病早期检测研究[J]. 光谱学与光谱分析, 2019, 39(3): 730-737.Chen Xinxin, Liu Ziyi, Lü Meiqiao, et al. Diagnosis and monitoring of sclerotinia stem rot of oilseed rape using thermal infrared imaging [J]. Spectroscopy and Spectral Analysis, 2019, 39(3): 730-737.
[3]康丽, 袁建清, 高睿, 等. 高光谱成像的水稻稻瘟病早期分级检测[J]. 光谱学与光谱分析, 2021, 41(3): 898-902.Kang Li, Yuan Jianqing, Gao Rui, et al. Early detection and identification of rice blast based on hyperspectral image [J]. Spectroscopy and Spectral Analysis, 2021, 41(3): 898-902.
[4]宋英, 陈雨欣, 杨俊, 等. 利用数字图像颜色特征指数识别小麦赤霉病[J]. 江苏农业科学, 2022, 50(2): 186-191.Song Ying, Chen Yuxin, Yang Jun, et al. Recognition of wheat fusarium head blight using digital image color feature index [J]. Jiangsu Agricultural Sciences, 2022, 50(2): 186-191.
[5]Bian Y C, Si X L. Application of new clustering algorithm based on MapReduce in agriculture—A case study on image target recognition of Panonychus citri McGregor [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(9): 166-171.
[6]朱永宁, 周望, 杨洋, 等. 基于Faster R-CNN的枸杞开花期与果实成熟期识别技术[J]. 中国农业气象, 2020, 41(10): 668-677.Zhu Yongning, Zhou Wang, Yang Yang, et al. Automatic identification technology of Lycium barbarum flowering period and fruit ripening period based on Faster R-CNN [J]. Chinese Journal of Agrometeorology, 2020, 41(10): 668-677.
[7]邱菊, 徐燕. 基于YOLOv5s的草莓病害识别系统设计[J]. 农业技术与装备, 2023(5): 41-42, 45.Qiu Ju, Xu Yan. Design of strawberry disease identification system based on YOLOv5s [J]. Agricultural Technology & Equipment, 2023(5): 41-42, 45.
[8]Kim B, Han Y K, Park J H, et al. Improved vision-based detection of strawberry diseases using a deep neural network [J]. Frontiers in Plant Science, 2021, 11: 559172.
[9]Ma L, Guo X, Zhao S, et al. Algorithm of strawberry disease recognition based on deep convolutional neural network [J]. Complexity, 2021, 2021: 1-10.
[10]楊艳杰. 草莓病害及防治[J]. 农民致富之友, 2013(19): 49.
[11]刘莫尘, 高甜甜, 马宗旭, 等. 基于MSRCR-YOLOv4-tiny的田间玉米杂草检测模型[J]. 农业机械学报, 2022, 53(2): 246-255, 335.Liu Mochen, Gao Tiantian, Ma Zongxu, et al. Target detection model of corn weeds in field environment based on MSRCR algorithm and YOLOv4tiny [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(2): 246-255, 335.
[12]许煊汶. 基于计算机视觉的水稻成熟度快速检测APP的研究[D]. 长春: 吉林大学, 2021.Xu Xuanwen. Research on APP for rapid detection of rice maturity based on computer vision [D]. Changchun: Jilin University, 2021.
[13]包晓敏, 王思琪. 基于深度学习的目标检测算法综述[J]. 传感器与微系统, 2022, 41(4): 5-9.Bao Xiaomin, Wang Siqi. Survey of object detection algorithm based on deep learning [J]. Transducer and Microsystem Technologies, 2022, 41(4): 5-9.
[14]邱天衡, 王玲, 王鹏, 等. 基于改进YOLOv5的目标检测算法研究[J]. 计算机工程与应用, 2022, 58(13): 63-73.Qiu Tianheng, Wang Ling, Wang Peng, et al. Research on object detection algorithm based on improved YOLOv5 [J]. Computer Engineering and Applications, 2022, 58(13): 63-73.
[15]曾广淼, 俞万能, 王荣杰, 等. 船舶目标重叠下马赛克图像数据增强方法研究[J]. 控制理论与应用, 2022, 39(6): 1139-1148.Zeng Guangmiao, Yu Wanneng, Wang Rongjie, et al. Research on mosaic image data enhancement and detection method for overlapping ship targets [J]. Control Theory & Applications, 2022, 39(6): 1139-1148.
[16]龙洁花, 郭文忠, 林森, 等. 改进YOLOv4的温室环境下草莓生育期识别方法[J]. 智慧农业(中英文), 2021, 3(4): 99-110.Long Jiehua, Guo Wenzhong, Lin Sen, et al. Strawberry growth period recognition method under greenhouse environment based on improved YOLOv4 [J]. Smart Agriculture, 2021, 3(4): 99-110.
[17]Woo S, Park J, Lee J Y, et al. Cbam: Convolutional block attention module [C]. Proceedings of the European Conference on Computer Vision (ECCV), 2018: 3-19.
[18]廖冠中, 周嘉灏, 冷鸿杰. 基于改进YOLOv4的水果识别模型研究[J]. 长江信息通信, 2022, 35(5): 44-47.Liao Guanzhong, Zhou Jiahao, Leng Hongjie. Research on fruit recognition model based on improved YOLOv4 [J]. Changjiang Information & Communications, 2022, 35(5): 44-47.
[19]张秀花, 静茂凯, 袁永伟, 等. 基于改进YOLOv3-Tiny的番茄苗分级检测[J]. 农业工程学报, 2022, 38(1): 221-229.Zhang Xiuhua, Jing Maokai, Yuan Yongwei, et al. Tomato seedling classification detection using improved YOLOv3-Tiny [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(1): 221-229.
[20]趙辉, 乔艳军, 王红君, 等. 基于改进YOLOv3的果园复杂环境下苹果果实识别[J]. 农业工程学报, 2021, 37(16): 127-135.Zhao Hui, Qiao Yanjun, Wang Hongjun, et al. Apple fruit recognition in complex orchard environment based on improved YOLOv3 [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(16):127-135.
[21]张继成, 李德顺. 基于深度残差学习的成熟草莓识别方法[J]. 中国农机化学报, 2022, 43(2): 136-142.Zhang Jicheng, Li Deshun. Ripe strawberry recognition method based on deep residual learning [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(2): 136-142.
[22]顾宝兴, 刘钦, 田光兆, 等. 基于改进YOLOv3的果树树干识别和定位[J]. 农业工程学报, 2022, 38(6): 122-129.Gu Baoxing, Liu Qin, Tian Guangzhao, et al. Recognizing and locating the trunk of a fruit tree using improved YOLOv3 [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(6):122-129.
基金项目:国家自然科学基金资助项目(31401291);常州市第十批科技计划项目(国际科技合作/港澳台科技合作)(CZ20220010)
第一作者:邱畅,女,1998年生,福建福州人,硕士;研究方向为电子信息。E-mail: 623083282@qq.com
通讯作者:田光兆,男,1983年生,河南信阳人,博士,副教授;研究方向为传感器技术和智能车辆导航。E-mail: tgz@njau.edu.cn
猜你喜欢
阅读与作文(小学高年级版)(2017年10期)2017-10-11
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
科教导刊(2016年25期)2016-11-15
软件导刊(2016年9期)2016-11-07
软件工程(2016年8期)2016-10-25
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04
爆笑show(2015年4期)2015-06-24