基于多角度Kinect v2的羊只三维模型重构方法研究
2024-04-27 04:01范才虎程曼袁洪波王媛蔡振江
中国农机化学报 2024年3期
范才虎 程曼 袁洪波 王媛 蔡振江

摘要:羊只的体尺参数是衡量其生长发育状况、生产性能和遗传特性的关键指标。重建羊只的三维模型可以为自动化获取多种羊只体尺参数提供数据基础,因此提出一种基于多角度Kinect v2的羊只三维模型重构方法。该方法通过放置在羊只顶部和左右两个侧面的Kinect v2设备,获取羊只的三维点云数据;利用这些数据中的点云之间的相对位置关系,进行点云坐标的转换和初始配准;采用ICP算法进行精确配准建立三维模型。结果表明:当Kinect v2深度相机高度为120 cm、俯视角为30°时,获取的点云质量较高,自动配准的平均误差为0.233 cm,平均耗时为12.89 s。根据模型计算出的羊只体高、体斜长、十字部高和腰脚宽等体尺参数与实际测量平均误差均在5%以内。
关键词:羊只;Kinect v2;点云配准;三维重建;体尺计算
中图分类号:S24 文献标识码:A 文章编号:2095-5553 (2024) 03-0189-09
Reconstruction method of the 3D model for sheep based on multi-angle Kinect v2
Fan Caihu1, Cheng Man1, Yuan Hongbo1, Wang Yuan2, Cai Zhenjiang1
(1. College of Mechanical and Electrical Engineering, Hebei Agricultural University, Baoding, 071001, China;2. Hengshui Zhihao Animal Husbandry Technology Co., Ltd., Hengshui, 053400, China)
Abstract:
The body size parameters of sheep are the key indicators to assess the growth, performance and genetic characteristics. The reconstruction of the 3D model can provide data basis for automatic acquisition of various body size parameters for sheep. In this paper, a reconstruction method is designed for the 3D model of sheep based on multi-angle Kinect v2. By placing Kinect v2 devices on the top and both sides of the sheep, three-dimensional point cloud data of the sheep can be captured. Then, by utilizing the relative positional relationships between the point clouds in the data, coordinate transformation and initial alignment of the point clouds are performed. Finally, the Iterative Closest Point (ICP) algorithm is used for precise registration to establish the three-dimensional model. The results show that when the height of Kinect v2 depth camera is 120 cm and the overlooking angle is 30°, the quality of the obtained point cloud is higher. The average error of automatic registration is 0.233 cm, and the average time of automatic registration is 12.89 s. The average error of body size parameters such as body height, body oblique length, cross height and waist and foot width calculated by the model and the actual measurement are within 5%.
Keywords:sheep; Kinect v2; point cloud registration; three-dimensional reconstruction; body size calculation
0 引言
羊的養殖是畜牧业的重要组成部分[13],截至2023年,世界绵羊养殖数量已经超过13亿只,主要集中在亚洲和非洲地区,其中中国绵羊养殖数量超过1.7亿只[4]。羊的体尺参数可以反映其体型、结构和发育状况,也可以反映其生理功能、生产性能、抗病能力和对外界生活条件的适应性等[5]。因此,进行羊只体尺的监测对提高精准养殖水平具有重要的现实意义[6]。
传统的动物体尺测量方法是人工利用标尺、卷尺等工具对其进行直接测量[7]。这种方式不但工作量大,而且获取的结果受主观性影响。此外,这种测量方法需要固定住动物并与之直接接触,这易使动物产生应激反应,导致生产性能下降、疾病增加,甚至死亡,严重影响动物个体的生长发育[8]。这种传统的接触式体尺测量方法降低动物的福利化饲养水平[9],并增加人畜共患病传播的风险[10]。随着信息感知技术和精准养殖水平的提高,家畜体尺获取方式逐渐向非接触式转变[11, 12],在猪、牛和羊的体尺获取方面,非接触式测量都得到了研究[1316]。非接触式测量一般利用图像的方法进行体尺的估计[17, 18],通过图像处理方法寻找图像中动物体尺的关键点,计算关键点之间的距离从而得到动物的体尺数据[1922]。图像是平面而非立体的,无法一次性得到更多的体尺参数,比如体高、体长、体宽等无法通过同一个平面得到。动物的三维模型能够反映出其更多的体尺特征,便于从不同的角度对体尺参数进行评估。
立体视觉技术在动物三维模型重建中得到了较早的应用,利用两个或者多个相机从不同视角对目标进行拍摄,通过提取多幅图像中对应特征点重构目标的三维结构[23, 24]。然而,现有的图像获取技术仍有一定的局限性,如光照、阴影和背景噪声的变化会影响图像的质量,这会增加图像处理的难度[25]。为了更好地寻找更多的对应特征点,SfM(Structure from motion)方法被提出[26, 27]。SfM可以从更多的角度获取目标的图像,但这并没有从本质上解决获取的图像质量会直接影响模型重构的精度这一问题。随着传感器的发展,TOF(Time of flight)技术逐渐被应用在三维重建中[2830],该方法通过向目标投射光源然后根据ToF原理计算出设备到目标的距离,并以此获得目标的三维点云。Le Cozler等[31]利用Morpho3D获取奶牛的三维点云,重建出奶牛的三维模型在测量出奶牛的体尺数据。单线激光雷达是早期使用较多的ToF设备。Huang等[32]利用单线雷达重建出秦川牛的三维模型,再测量出秦川牛的体尺数。但使用单线雷达需要设计运动机构。多线激光雷达的出现从一定程度解决了上述问题,但多线雷达的价格过于昂贵,这给实际应用带来了障碍。而且ToF技术丢失了颜色信息,不利于后期数据处理。近年来,利用RGB-D相机进行动物的三维建模得到了发展,它可以同时获取目标的RGB和深度信息,而且成本较低。以Kinect为代表的RGB-D相机已经在动物三维建模及体尺测量中得到了较多的应用。如Pezzuolo[33]、Shi[34]等分别利用Kinect v1、Kinect v2测量了猪的体尺数据。利用Kinect进行动物三维模型的构建已经被证明是一种有效的方法。但是,只利用一台Kinect也是难以准确的构建完整动物的三维模型,因為它同样难以扫描和拍摄到动物体的背面,因此需要利用多个Kinect从不同角度采集数据。
针对羊只体尺测量的需求,本文设计一种羊只三维模型重构系统,能够从三个方向获取羊只躯体的三维点云,利用多角度点云的坐标转化和配准方法,得到完整的羊只三维模型,获取羊只的体尺参数。
1 材料和方法
1.1 试验方法
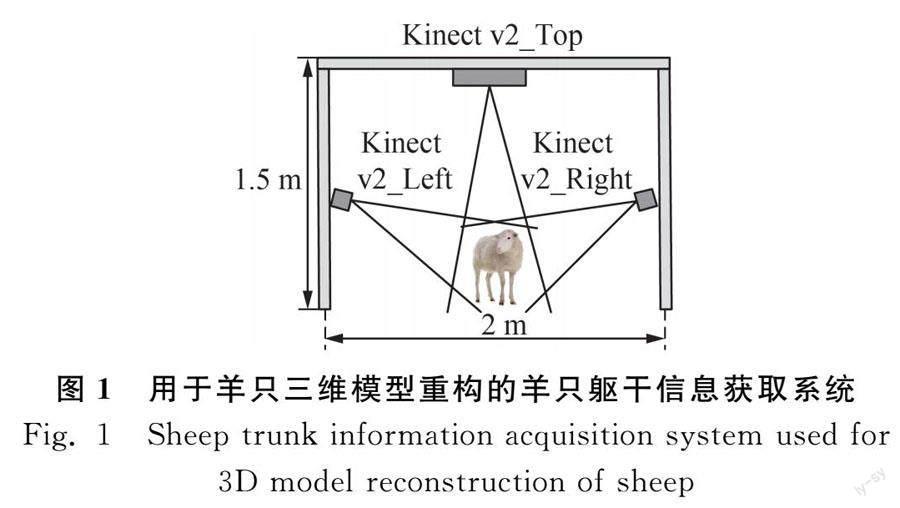
为获取羊只点云信息,构建一个信息获取系统,如图1所示,该系统由一个金属框架,三台Kinect v2和一台笔记本电脑组成,2台Kinect v2分别被安装在框架的左右两侧,且其高度和角度可以调整,第3台Kinect v2被安装在框架顶部的中间,面向地面。三台Kinect v2通过USB数据线与笔记本电脑相连,并由笔记本电脑控制其工作状态。
采用正交试验寻找Kinect v2的合适位置。一个羊只模型被放置在框架正下方,框架两侧安装的Kinect v2分别在70 cm、95 cm、120 cm三个高度,从20°、30°、45°、50°、55°的俯视角度进行数据获取试验。试验采用2个不同的羊只模型,共获取92片有效点云。三台Kinect v2获取的点云分别被命名为P_left,P_right和P_top。
基于Microsoft Visual Studio 2017、PCL(point cloud library)1.8.1和OpenCV3.4.1等工具软件,利用C++编程,开发数据获取和分析软件,用于点云数据的处理和羊只的三维建模。
1.2 数据获取
利用Kinect v2获取的点云数据包括大量的背景点云和少量的噪声,在生成羊只个体点云之前需要进行滤波处理。背景点云可以通过直通滤波法进行处理,直通滤波通过构建约束条件并把不满足条件的点云消除来实现的,约束条件如式(1)所示,所有不满足这个约束条件的点云被认为是背景噪声而被过滤掉。
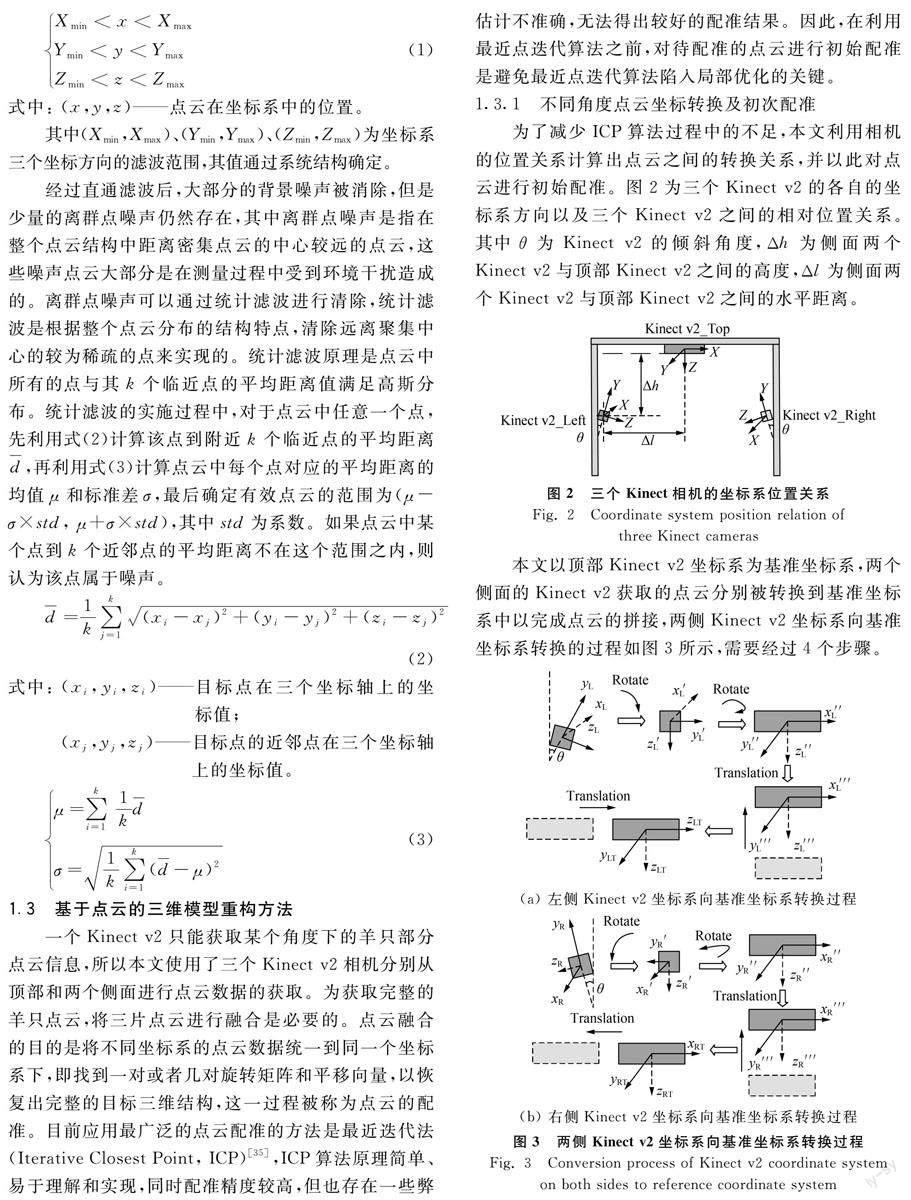
Xmin 式中:(x,y,z)——点云在坐标系中的位置。 其中(Xmin,Xmax)、(Ymin,Ymax)、(Zmin,Zmax)为坐标系三个坐标方向的滤波范围,其值通过系统结构确定。 经过直通滤波后,大部分的背景噪声被消除,但是少量的离群点噪声仍然存在,其中离群点噪声是指在整个点云结构中距离密集点云的中心较远的点云,这些噪声点云大部分是在测量过程中受到环境干扰造成的。离群点噪声可以通过统计滤波进行清除,统计滤波是根据整个点云分布的结构特点,清除远离聚集中心的较为稀疏的点来实现的。统计滤波原理是点云中所有的点与其k个临近点的平均距离值满足高斯分布。统计滤波的实施过程中,对于点云中任意一个点,先利用式(2)计算该点到附近k个临近点的平均距离 d-,再利用式(3)计算点云中每个点对应的平均距离的均值μ和标准差σ,最后确定有效点云的范围为(μ-σ×std, μ+σ×std),其中std为系数。如果点云中某个点到k个近邻点的平均距离不在这个范围之内,则认为该点属于噪声。 d-=1k∑kj=1(xi-xj)2+(yi-yj)2+(zi-zj)2(2) 式中:(xi,yi,zi)——目标点在三个坐标轴上的坐标值;(xj,yj,zj)——目标点的近邻点在三个坐标轴上的坐标值。 μ=∑ki=11kd-σ=1k∑ki=1(d--μ)2(3) 1.3 基于点云的三维模型重构方法 一个Kinect v2只能获取某个角度下的羊只部分点云信息,所以本文使用了三个Kinect v2相机分别从顶部和两个侧面进行点云数据的获取。为获取完整的羊只点云,将三片点云进行融合是必要的。点云融合的目的是将不同坐标系的点云数据统一到同一个坐标系下,即找到一对或者几对旋转矩阵和平移向量,以恢复出完整的目标三维结构,这一过程被称为点云的配准。目前应用最广泛的点云配准的方法是最近迭代法(Iterative Closest Point, ICP)[35],ICP算法原理简单、易于理解和实现,同时配准精度较高,但也存在一些弊端,如该算法在对重叠度较大的点云进行配准时具有良好的配准效果,但是当重叠度较小时或者初始位置估计不准确,无法得出较好的配准结果。因此,在利用最近点迭代算法之前,对待配准的点云进行初始配准是避免最近点迭代算法陷入局部优化的关键。 1.3.1 不同角度点云坐标转换及初次配准 为了减少ICP算法过程中的不足,本文利用相机的位置关系计算出点云之间的转换关系,并以此对点云进行初始配准。图2为三个Kinect v2的各自的坐标系方向以及三个Kinect v2之间的相对位置关系。其中θ为Kinect v2的倾斜角度,Δh为侧面两个Kinect v2与顶部Kinect v2之间的高度,Δl为侧面两个Kinect v2与顶部Kinect v2之间的水平距离。 本文以顶部Kinect v2坐标系为基准坐标系,两个侧面的Kinect v2获取的点云分别被转换到基准坐标系中以完成点云的拼接,两侧Kinect v2坐标系向基准坐标系转换的过程如图3所示,需要经过4个步骤。 步骤一:左右两侧的Kinect v2坐标系分别围绕各自x轴向右和左旋转,直到y轴处于水平位置,此时z轴竖直向下。经过坐标系旋转,则Kinect v2获取的点云坐标位置如式(4)所示。 (xL′,yL′,zL′)=(xL,yL,zL)1000cosθ-sinθ0sinθcosθ(xR′,yR′,zR′)=(xR,yR,zR)1000cosθ-sinθ0sinθcosθ(4) 其中,(xL,yL,zL)、(xR,yR,zR)为左右两侧Kinect v2获取点云的原始坐标, (xL′,yL′,zL′)、(xR′,yR′,zR′)为左右两侧坐标转换后的坐标。 步骤二:步骤一得到的坐标系沿竖直方向的z轴再次被旋转,使两侧Kinect v2的坐标轴方向与顶部Kinect v2坐标轴方向一致。Kinect v2獲取的点云坐标位置如式(5)所示。 (xL″,yL″,zL″)=(xL′,yL′,zL′)0-10100001(xR″,yR″,zR″)=(xR′,yR′,zR′)010-100001(5) 其中,(xL″,yL″,zL″)、(xR″,yR″,zR″)为经过步骤二之后两侧Kinect v2获取的点云的坐标。 步骤三:步骤二得到的坐标系被向上移动Δh,使左右两次的Kinect v2坐标系与顶部Kinect v2坐标系处于同一水平位置。Kinect v2获取的点云坐标位置如式(6)所示。 (xL,yL,zL)=(xL″,yL″,zL″)-[00Δh](xR,yR,zR)=(xR″,yR″,zR″)-[00Δh](6) 其中,(xL,yL,zL)、(xR,yR,zR)为经过步骤三之后两侧Kinect v2获取的点云的坐标。 步骤四:步骤三得到的左右两侧Kinect v2坐标系分别被向左和向右移动Δl,使其与顶部Kinect v2坐标系重合。Kinect v2获取点云坐标位置如式(7)所示。 (xLT,yLT,zLT)=(xL,yL,zL)+[Δl00](xRT,yRT,zRT)=(xR,yR,zR-[Δl00](7) 其中,(xLT,yLT,zLT)、(xRT,yRT,zRT)为经过步骤四之后两侧Kinect v2获取的点云的坐标。 经过坐标变换,左右两侧Kinect v2获取的点云被转换到顶部Kinect v2的坐标系下,三个Kinect v2的点云可以被直接拼接。 1.3.2 三维点云的精细配准 在点云的初次配准过程中,θ、Δh和Δl的测量精度直接影响其精度,而且这三个参数都是基于Kinect v2的几何中心来测量,测量过程中的误差是难以避免的。此外,在实际应用过程中,也无法保证羊只是静止不动的,所以初次配准的结果也可能存在一定的误差。为了提高三维模型的重构精度,精细配准是必要的。本文利用ICP算法在初次配准的基础上进行精细配准,步骤如下:(1)对于点云集P中任意一个点pi,计算其与点云集Q中所有点的欧式距离,取距离最小的点作为pi的对应点qi。(2)计算使pi和qi完全重合需要的旋转参数Ri和平移参数Ti。(3)利用Ri和Ti对点云集P和Q中的其他点进行配准,并利用式(8)计算配准误差。(4)遍历点云中所有点,取最小误差对应的R和T作为最优匹配参数。(5)根据得到的最优R和T,对初次配准后的点云进行精细配准。 E(R,T)=1n∑ni=1‖qi-(Rpi+T)‖2(8) 式中:n——点云的数量。 1.4 地面点云的去除 经过两次配准后,羊只的三维模型被重构,由于地面与羊只的腿部相连,所以重构的模型中还包含有地面信息。通过RANSK算法可以被去除地面信息,先随机从点云中取三个不共面的点,生成一个参考平面,再计算点云中其他点到该平面的距离,如果距离值小于阈值dp则该点被认为属于该平面,其中阈值可以通过式(9)得到。遍历点云中所有点,包含点数最多的平面为地面,属于该平面的点将被删除。 dis(p,q)=(xp-xq)2+(yp-yq)2+(zp-zq)2dp=min[dis(p,q)] q=1,2,…n,p≠qdp=1n∑np=1dp(9) 式中:p(xp,yp,zp)——被随机选择的点;q(xq,yq,zq)——点云中其他的任意一点;dis(p,q)——点p、点q之间的欧氏距离;dp——最小欧式距离。 1.5 三维重构模型的性能评估指标 1.5.1 重叠点云的配准误差 两侧Kinect v2和顶部Kinect v2的成像范围存在重叠的部分,在精细配准的过程中,可以找到这些重叠的点云。在同一个坐标系下,同一个目标的点云应该是重合的,所以这些点重叠的程度可以用于衡量三维重构模型的点云匹配精度。因此,本文取这些重叠点云配准的均方根误差RMSE作为三维模型重构的性能评判指标之一,如式(10)所示,RMSE越小,则配准效果越好。 di=(xi-xi′)2+(yi-yi′)2+(zi-zi′)2RMSE=∑Ni=1di2N(10) 式中:(xi,yi,zi)——重叠的点云中顶部Kinect v2获取的点云坐标;(xi′,yi′,zi′)——重叠点云中两侧Kinect v2转到基准坐标系中的点云坐标;di——两点之间的距离;N——重叠点云的个数。 1.5.2 羊只体尺参数 本文利用体高、体斜长、管围、胸围、十字部高、腰脚宽作为羊只三维重构模型精度评估的体尺参数。体高指耆甲最高点到地面的垂直距离;体斜长指肩胛前端至坐骨结节后端的直线距离;管围指管骨上三分之一处的周围长度;胸围指在肩胛骨后端,围绕胸部一周的长度;十字部高指十字部到地面的垂直距离;腰角宽指两髋骨突之间的直线距离[16]。为验证羊只三维模型的精度,人工对2只模型羊的体尺参数进行测量,并与根据模型计算出的体尺参数进行对比。 2 结果与分析 2.1 正交试验结果 羊只躯干信息获取系统中右侧Kinect在不同高度和俯视角下的进行正交试验时的点云成像结果如图4所示。在同一高度,随着Kinect v2俯视角的增加,点云图像中的羊只越靠近顶部。由于Kinect v2在深度成像的边缘部分会出现数据失真和数据丢失现[36],故侧面Kinect v2的俯视角不宜过大;在同一角度,Kinect v2距离地面高度越大,羊只轮廓在整幅深度图像中像素占比越小,即点云数量越少,因此,侧面Kinect v2高度不宜过大。本文中Kinect v2垂直视场角为60°,当其高度为90 cm且具有一定俯视角的情况下,在垂直方向上拍摄高度将低于1 m,对于躯体较大的羊只,有可能无法获取其全部躯体的点云,因此,侧面Kinect v2的高度应大于90 cm。通过正交试验可确定侧面Kinect v2在高度和俯视角分别为120 cm和30°时,获取的点云质量较好。 2.2 点云预处理结果 图5为经过滤波预处理的点云,经过直通滤波后,原始点云中的大部分背景被清除。经过统计滤波后羊只轮廓边缘的离群点噪声有了显著减少,表1为预处理之后点云数量的变化。 从表1可以看出,三个角度的Kinect v2经过直通滤波后,两侧点云数量约为原始点云的11.34%,顶部点云约为原始点云的35.20%。减少的点云大部分为背景点云,这也表明了直通滤波的有效性。直通滤波后仍然存在的噪声点云在统计滤波的基础上被清除,统计滤波大致能够保留直通滤波后点云的93.86%。 2.3 点云配准的结果 点云配准是羊只形体三维重建的关键,配准效果将直接影响三维模型的精度。图6为三个角度Kinect v2获取的点云经过两次配准的结果。 初始配准可以重建出羊只的三维模型,但地面部分的点云未能完全重叠在同一平面,且羊只轮廓中部分点云也存在倾斜,未能很好地配准在一起。经过精确配准后地面和羊只轮廓的点云均较好的重叠在一起。这说明本文初始配准的方法可以将点云进行配准,经过精确配准后可以优化初始配准中的不足,使配准效果更好。表2为初始配准和精确配准的效果比较。 从表2可以看出,初始配准和精细配准前后源点云数和目标点云数未发生改变,RMSE在精确配准后变小,这也证明了精确配准的有效性。 2.4 地面去除的结果 经过RANSAC算法后,地面点云和羊只点云被很好地区分,且地面部分的点云被去除,羊只部分的点云被保留,从而获得完整的羊只三维模型。 2.5 三维模型精度评估结果 两只模型羊的体尺测量结果和根据三维模型计算的结果分别如表3和表4所示。由表3、表4可知,针对体高、体斜长、十字部高、腰脚宽这四个体尺参数,模型计算值和测量值的相对误差均在5%以内。但1号模型羊的管围和胸围的模型计算值和测量值相对误差分别为9.58%、10.00%,2号模型羊管围和胸围的模型计算值和测量值相对误差分别达到了23.44%和8.33%,误差相对较大。这是因为重建完成的羊只模型在管围、胸围处点云产生一定的缺失,导致羊只轮廓完整性受到影响,从而使得试验计算值偏小,产生较大的计算误差。 3 讨论 3.1 数据处理过程对试验结果的影响 在羊只三维重构的过程中,系统获取的三维点云数据需要经过直通滤波、统计滤波、地面去除、初始配准和精确配准等多个数据处理环节。实施这些环节的顺序对试验结果具有一定的影响,例如不经过滤波处理而先将获取的原始点云数据进行配准,则需要占用较大的计算机内存,降低数据处理的速度,因此,为了确定相对合理的数据处理顺序,本文对三种数据处理方案进行了比较。方案1首先按进行直通滤波和统计滤波,然后进行初始和精确配准,最后去除地面;方案2首先进行直通和统计滤波,然后去除地面,最后进行初始和精确配准;方案3首先进行直通滤波,然后进行初始和精确配准,接下来去除地面,最后进行统计滤波。利用三种不同方案对点云进行处理的过程如图8所示。 从图8可以看出,三种方案均可以重建羊只的三维模型。方案3重建的模型在羊只轮廓的边缘部分存在有部分噪声点云,这是因为本方案中先进行了配准再进行统计滤波,配准后同一区域的点云为三片点云的组合,不同点云中的离群点噪声可能会相互补充使其离群性降低,导致处理复杂性增加,使边缘部分的噪声点云难以去除。方案2进行模型重建时先去除地面点云再进行配准,而先去除地面意味着在进行配准时就失去了大量的重叠点云进行相互校验,容易导致精确配准的精度下降,因此,方案1的数据处理顺序相对合理,三维模型重建效果也相对较好。 3.2 配准算法性能分析 本文提出的初始配准方法直接使用点云之间的相对位置关系对源点云进行旋转和平移,使其转换到正确的位置,再利用ICP算法进行点云的精确配准。相对于其他常用的点云配准方法,如SAC-IA(Sample Consensus Initial Aligment)+ICP[37]、NDT(Normal Distribution Transform)+ICP[38]、4PCS(4-Points Congruent Sets)+ICP[39]等,本方法提高了尋找两片点云之间的对应点的准确性,减少了寻找两片点云之间的对应点的迭代次数,不仅能够减少处理的时间,而且具有更好的鲁棒性。 为了验证本文方法的优势,针对相同的点云,进行不同配准方法的对比试验。图9为不同配准方法对相同点云的配准对比试验结果,只有本文提出的方法和SAC-IA+ICP方法能够重建出羊只的三维模型。但是后者重建的模型中点云重叠率相对较低,三维重建效果也相对较差,而其他两种点云配准方法不能重构出完整的羊只模型。从图9可以看出,初始配准对于重建物体的三维模型具有重要的影响,如果初始配准过程中不能找到不同点云片中对应点,即使进行精确配准也无法重构出正确的三维模型。通过比较,本文算法重建出来的羊只三维模型效果較好,且鲁棒性强。表5为不同配准算法性能比较。 从表5可以看出,本文提出的方法在RMSE值与SAC+FPFH+ICP非常接近,小于其他两种方法,但是点云配准所花费的时间远小于其他三种方法,因此,相对于其他方法,本文提出的方法具有明显的优势。 3.3 系统使用限制及未来改进方向 本文提出的羊只三维模型重构方法仅在实验室内完成了理论验证,在实际应用场景中,还存在一些问题需要解决。第一,作为一种动物,羊只在被测量时很难保持静止不动,这为数据获取增加了难度,因此,需要在系统中增加限制其活动的结构,使其在测量时尽量保持不动。第二,为了实现自动化的数据采集,需要在信息获取系统中增加拍摄触发装置,利用传感器检测羊只是否处于拍摄位置,并能够及时触发拍摄装置进行信息获取。第三,重建羊只三维模型是为了能够准确且自动化地获取其相关体尺参数,因此还需要开发出相应的体尺参数自动获取软件,可以实现体尺参数的实施自动化获取。这些问题的解决方案是本研究目前和下一步的工作重点。 4 结论 1) 本文提出一种基于多角度Kinect v2重建羊只三维模型的方法,利用Kinect v2之间的相对位置关系进行点云坐标的转化,据此进行初始配准,然后利用ICP算法进行精细配准并建立羊只躯体的三维模型。 2) 通过正交试验确定Kinect v2相对较佳的高度和拍摄俯视角分别为120 cm和30°,这种情况下拍摄得到的点云质量较好;与其他点云配准的方法相比,本文提出的方法在初始配准时减少了寻找对应点所花费的时间,在精确配准时削减了因多次迭代引起的误差累积,其配准过程总消耗时间平均约为12.89 s,配准误差均值为0.233 cm,在保证精度的情况下大大提高了三维模型构建的速度。 3) 本文确定了点云滤波等预处理的合理流程顺序:首先按进行直通滤波和统计滤波,然后进行初始和精确配准,最后去除地面,这样可以更好地提取羊只的三维点云;根据模型计算出的羊只体高、体斜长、十字部高和腰脚宽等体尺参数与实际测量平均误差均在5%以内。本文提出的羊只三维模型构建方法为畜牧养殖自动化和智能化提供参考。 参 考 文 献 [1]Matte A, Waquil P D. Changes in markets for lamb in livestock family farming in Brazil [J]. Small Ruminant Research, 2021, 205: 106535. [2]Gurgel A L C, dos Santos Difante G, Neto J V E, et al. Prediction of dry matter intake by meat sheep on tropical pastures [J]. Tropical Animal Health and Production, 2021, 53: 1-8. [3]Mahon N, Clark B, Proctor A, et al. Exploring farmers understanding of and responses to endemic animal health and welfare issues in the UK [J]. Veterinary Record, 2021, 189(10): 1-8. [4]Chikwanha O C, Mupfiga S, Olagbegi B R, et al. Impact of water scarcity on dryland sheep meat production and quality: Key recovery and resilience strategies [J]. Journal of Arid Environments, 2021, 190: 104511. [5]Pallottino F, Steri R, Menesatti P, et al. Comparison between manual and stereovision body traits measurements of Lipizzan horses [J]. Computers and Electronics in Agriculture, 2015, 118: 408-413. [6]Rathbun F M, Pralle R S, Bertics S J, et al. Relationships between body condition score change, prior mid-lactation phenotypic residual feed intake, and hyperketonemia onset in transition dairy cows [J]. Journal of Dairy Science, 2017, 100(5): 3685-3696. [7]马学磊, 薛河儒, 周艳青, 等. 基于改进区域生长法的羊体点云分割及体尺参数测量[J]. 中国农业大学学报, 2020, 25(3): 99-105.Ma Xuelei, Xue Heru, Zhou Yanqin, et al. Point cloud segmentation and measurement of the body size parameters of sheep based on the improved region growing method [J]. Journal of China Agricultural University, 2020, 25(3): 99-105. [8]孙芊芊, 李海军, 宣传忠, 等. 基于羊只应激反应的智能饲喂机器人功能与造型研究[J]. 内蒙古农业大学学报(自然科学版), 2019, 40(5): 60-64.Sun Qianqian, Li Haijun, Xuan Chuanzhong, et al. Research on function and modeling of intelligent feeding robot based on sheep stress response [J]. Journal of Inner Mongolia Agricultural University (Natural Science Edition), 2019, 40(5): 60-64. [9]Buddle E A, Bray H J, Ankeny R A. “Of course we care!”: A qualitative exploration of Australian livestock producers understandings of farm animal welfare issues [J]. Journal of Rural Studies, 2021, 83: 50-59. [10]楊鹏. 羊常见传染病的预防及治疗方法[J]. 畜牧兽医科技信息, 2021(9): 138. [11]Marinello F, Pezzuolo A, Cillis D, et al. Application of Kinect-Sensor for three-dimensional body measurements of cows [J]. Proceedings of the 7th European Precision Livestock Farming, ECPLF, 2015. [12]Zhou Y, Xue H, Wang C, et al. Reconstruction and body size detection of 3d sheep body model based on point cloud data [C]. IFIP WG International Conference on Computer and Computing Technologies in Agriculture, 2019: 251-262. [13]Wang K, Guo H, Ma Q, et al. A portable and automatic Xtion-based measurement system for pig body size [J]. Computers and Electronics in Agriculture, 2018, 148: 291-298. [14]Condotta I C F S, Brown-Brandl T M, Silva-Miranda K O, et al. Evaluation of a depth sensor for mass estimation of growing and finishing pigs [J]. Biosystems Engineering, 2018, 173: 11-18. [15]Alvarez J R, Arroqui M, Mangudo P, et al. Body condition estimation on cows from depth images using Convolutional Neural Networks [J]. Computers and Electronics in Agriculture, 2018, 155: 12-22. [16]Zhang A L, Wu B P, Wuyun C T, et al. Algorithm of sheep body dimension measurement and its applications based on image analysis [J]. Computers and Electronics in Agriculture, 2018, 153: 33-45. [17]司永胜, 安露露, 刘刚, 等. 基于Kinect相机的猪体理想姿态检测与体尺测量[J]. 农业机械学报, 2019, 50(1): 58-65.Si Yongsheng, An Lulu, Liu Gang, et al. Ideal posture detection and body size measurement of pig based on Kinect [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 58-65. [18]郝雪萍. 基于图像处理的杜泊羊体重估算模型研究[D]. 武汉: 武汉理工大学, 2015. [19]张丽娜, 杨建宁, 武配, 等. 羊只形态参数无应激测量系统设计与试验[J]. 农业机械学报, 2016, 47(11): 307-315.Zhang Lina, Yang Jianning, Wu Pei, et al. Design and experiment of non-stress measuring system for sheeps conformation parameters [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 307-315. [20]Khojastehkey M, Aslaminejad A A, Shariati M M, et al. Body size estimation of new born lambs using image processing and its effect on the genetic gain of a simulated population [J]. Journal of Applied Animal Research, 2016, 44(1): 326-330. [21]Vieira A, Brando S, Monteiro A, et al. Development and validation of a visual body condition scoring system for dairy goats with picture-based training [J]. Journal of Dairy Science, 2015, 98(9): 6597-6608. [22]Shi C, Teng G, Li Z. An approach of pig weight estimation using binocular stereo system based on LabVIEW [J]. Computers and Electronics in Agriculture, 2016, 129: 37-43. [23]Yang L, Wang B, Zhang R, et al. Analysis on location accuracy for the binocular stereo vision system [J]. IEEE Photonics Journal, 2017, 10(1): 1-16. [24]Cui Y, Zhou F, Wang Y, et al. Precise calibration of binocular vision system used for vision measurement [J]. Optics Express, 2014, 22(8): 9134-9149. [25]赵建敏, 赵忠鑫, 李琦. 基于Kinect传感器的羊体体尺测量系统[J]. 传感器与微系统, 2015, 34(9): 100-103.Zhao Jianmin, Zhao Zhongxin, Li Qi. Sheep body size measurement system based on Kinect sensor [J]. Transducer and Microsystem Technologies, 2015, 34(9): 100-103. [26]Pezzuolo A, Gonzàlez L A, Giora D, et al. Body measurements of dairy cows using a structure from motion (SfM) photogrammetry approach [C]. 8th European Conference on Precision Livestock Farming, EC-PLF, 2017: 483-492. [27]Pezzuolo A, Milani V, Zhu D H, et al. On-barn pig weight estimation based on body measurements by structure-from-motion (SfM) [J]. Sensors, 2018, 18(11): 3603. [28]初梦苑, 刘刚, 司永胜, 等. 基于三维重建的奶牛体重预估方法[J]. 农业机械学报, 2020, 51(S1): 378-384.Chu Mengyuan, Liu Gang, Si Yongsheng, et al. Predicting method of dairy cow weight based on three-dimensional reconstructions [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 378-384. [29]張馨月, 刘刚, 经玲, 等. 基于点云精简的奶牛背部体尺测点自动提取方法[J]. 农业机械学报, 2019, 50(S1): 267-275.Zhang Xinyue, Liu Gang, Jing Ling, et al. Automatic extraction method of cows back body measuring point based on simplification point cloud [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(S1): 267-275. [30]蔡静怡, 严飞, 吴兆祥, 等. 基于Kinect v2的多视角三维重建实现[J]. 传感技术学报, 2020, 33(8): 1149-1154.Cai Jingyi, Yan Fei, Wu Zhaoxiang, et al. Implementation of multi-view 3D reconstruction based on Kinect v2 [J]. Chinese Journal of Sensors and Actuators, 2020, 33(8): 1149-1154. [31]Le Cozler Y, Allain C, Caillot A, et al. High-precision scanning system for complete 3D cow body shape imaging and analysis of morphological traits [J]. Computers and Electronics in Agriculture, 2019, 157: 447-453. [32]Huang L, Li S, Zhu A, et al. Non-contact body measurement for qinchuan cattle with LiDAR sensor [J]. Sensors, 2018, 18(9): 3014. [33]Pezzuolo A, Guarino M, Sartori L, et al. On-barn pig weight estimation based on body measurements by a Kinect v1 depth camera [J]. Computers and Electronics in Agriculture, 2018, 148: 29-36. [34]Shi S, Yin L, Siang S, et al. Research on 3D surface reconstruction and body size measurement of pigs based on multi-view RGB-D cameras [J]. Computers and Electronics in Agriculture, 2020, 175(1): 105543. [35]Shu Q, He X, Wang C, et al. Fast point cloud registration in multidirectional affine transformation [J]. Optik, 2021, 229: 165884. [36]Lunin A, Glock C H. Systematic review of Kinect-based solutions for physical risk assessment in manual materials handling in industrial and laboratory environments [J]. Computers & Industrial Engineering, 2021, 162: 107660. [37]郑立华, 王露寒, 王敏娟, 等. 基于Kinect相机的油麦菜自动化三维点云重建[J]. 农业机械学报, 2021, 52(7): 159-168.Zheng Lihua, Wang Luhan, Wang Minjuan, et al. Automated 3D reconstruction of leaf lettuce based on Kinect camera [J].Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(7): 159-168. [38]王庆闪, 张军, 刘元盛, 等. 基于NDT与ICP结合的点云配准算法[J]. 计算机工程与应用, 2020, 56(7): 88-95.Wang Qingshan, Zhang Jun, Liu Yuansheng, et al. Point cloud registration algorithm based on combination of NDT and ICP [J]. Computer Engineering and Applications, 2020, 56(7): 88-95. [39]Aiger D, Mitra N J, Cohen-Or D. 4-points congruent sets for robust pairwise surface registration [J]. Transactions on Graphics, 2008, 27(3): 670-679. 基金項目:河北省省级科技计划资助(21327402D);河北农业大学精准畜牧学科群建设项目(1090064) 第一作者:范才虎,男,1998年生,江苏镇江人,硕士研究生;研究方向为精准畜牧。E-mail: 1627189565@qq.com 通讯作者:程曼,女,1982年生,河北石家庄人,博士,教授;研究方向为动植物表型组高通量获取与智能解析。E-mail: chengman1982@126.com
猜你喜欢
吉林畜牧兽医(2024年2期)2024-04-01
中兽医学杂志(2022年5期)2022-12-12
吉林畜牧兽医(2022年6期)2022-11-16
兽医导刊(2021年17期)2021-01-09
软件(2020年3期)2020-04-20
今日畜牧兽医(2020年4期)2020-02-14
今日畜牧兽医(2018年7期)2018-02-13
光学精密工程(2016年6期)2016-11-07
腹腔镜外科杂志(2016年12期)2016-06-01
转化医学电子杂志(2015年4期)2015-12-27