基于LESO的DFIG-GSC反馈线性化直接功率控制
2024-04-20 04:11董锋斌史新涛
陕西理工大学学报(自然科学版) 2024年1期
王 凯, 董锋斌, 王 豪, 史新涛
陕西理工大学 电气工程学院, 陕西 汉中 723000
减少化石燃料使用的同时又能满足日益增长的电能需求是当前的重大挑战[1]。风能因其清洁、可再生等特点被广泛利用[2]。双馈风力发电机(Doubly Fed Induction Generator,DFIG)作为一种变速恒频系统,因其可调速、结构简单、功率灵活控制等优点而备受关注[3-4]。DFIG转子通过一对背靠背变换器与电网连接,其中,网侧变换器(Grid Side Converter,GSC)位于电网和转子侧之间,主要用来维持直流母线电压的稳定和控制功率因数,直流母线电压的变化会影响整个双馈风力发电系统的稳定性,因此,控制GSC有重要意义。
双馈风力发电机网侧变换器(DFIG-GSC)的传统控制方法采用电压外环、电流内环的双闭环PI控制结构,这种控制方法结构简单,易于实现目标,但是其动态性能不佳,当负载变化时,直流侧母线电压波动较大并且恢复时间较长。近年来,直接功率控制(Direct Power Control,DPC)因其鲁棒性强,响应速度快而被广泛研究[5-7]。基于矢量调制的DPC相比传统的矢量控制结构要简单,但往往要和线性调节器结合使用,这会使系统性能变差。有学者将鲁棒性能好的滑模控制(Sliding Mode Control,SMC)应用于非线性系统。文献[8-9]分别将基于指数趋近律的滑模和超螺旋二阶滑模用于DFIG系统,相较于传统的控制方法,其稳、动态性能有所提升,但当负载突变时,电压、电流仍有较为明显的抖振。且GSC直接功率模型中含有耦合项,会影响系统性能。
反馈线性化(Feedback Linearization,FL)是目前应用较为广泛的一种非线性控制方法。判断系统满足线性化的条件后,经过坐标变换,可设计得到反馈线性化控制律,从而实现线性系统的转换。但是,FL对系统参数要求较高,需要和其他控制方法结合来实现更佳的控制效果。文献[10]将FL与最优控制结合用于双馈异步发电机,实验结果表明,相较传统矢量控制,FL有更好的动态性能,对电流、电压控制能力更好。但是,其最优控制中,权矩阵选取单位阵无具体意义,其基于旋转坐标系下的数学模型需要电压定向,且会出现新的耦合项。文献[11]将FL与滑模控制结合用于抑制次同步控制相互作用,取得了良好的效果。文献[12]将FL与反步滑模控制相结合用于DC-DC模型中,与PID控制相比,其鲁棒性更佳。对比发现,FL与SMC结合使用有较好的性能,然而,将SMC与FL结合用于直接功率控制中解耦来提升控制性能的研究却鲜有报道。
滑模控制虽使系统快速稳定,但会带来抖振,同时系统模型中存在未建模部分,这都会使系统性能受到影响。线性扩张状态观测器(Linear Extended State Observer,LESO)在文献[13]中被提出,它仅需要知道系统状态变量和输出量,并不需要精确的模型,因而观测器被应用到各种系统中。文献[14]将反馈线性化与直接功率控制(FL-DPC)相结合应用于铁路调节器系统,并加入LESO对不确定项补偿,结果表明,相较于传统的直接功率控制,该方法能更好地保障电能质量。
因此,本文在分析现有研究成果的基础上,针对DFIG-GSC系统,建立αβ坐标系下的反馈线性化直接功率数学模型,对功率模型中的耦合项实现解耦。同时,为了减小FL对参数的依赖,将其与滑模控制结合使用,然后引入LESO对不确定因素估测形成补偿来提升系统的整体性能。最后搭建仿真模型证明该方法的有效性。
1 数学模型分析
网侧变换器(GSC)的结构如图1所示,图中ea、eb、ec分别为交流侧电网a、b、c三相电压,uga、ugb、ugc分别为交流侧电压,ia、ib、ic分别为交流侧a、b、c三相电流,L为交流侧电感,R为交流侧电阻,C为直流母线电容,Udc为直流母线电压,iload为直流侧电流。
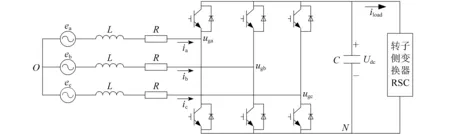
图1 GSC主电路
三相静止坐标系下DFIG-GSC的数学模型为
(1)
式中,Sa、Sb、Sc为图1中各桥臂开关函数。
根据式(1),可得两相静止αβ坐标系下DFIG-GSC的数学模型为
(2)
在αβ坐标系下交流侧瞬时有功、无功及直流侧功率的计算公式为
(3)
对上式有功、无功功率求导可得
(4)
网侧电压在αβ坐标系下还可以表示为
(5)
式中,|Eg|为相电压幅值,ω为电网电压角频率。
将式(2)、(5)代入式(4)得
(6)

(7)
从式(6)可以看出,功率数学模型中存在耦合项ωQ、ωP,下面采用反馈线性化方式对其解耦。
2 内环反馈线性化直接功率控制
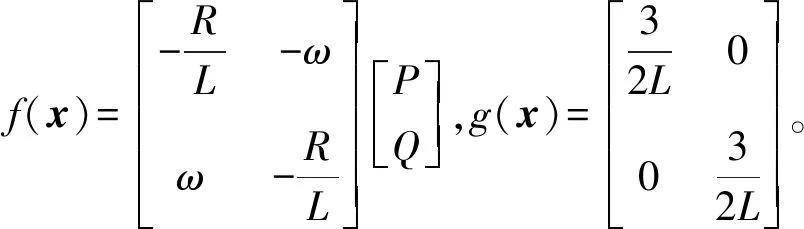
2.1 仿射非线性模型
在功率数学模型式(6)中,选取状态变量x=(x1,x2)T=(P,Q)T,输入变量u=(u1,u2)T=(d1,d2)T,输出变量y=h(x)=(h(x1),h(x2))T=(P-Pref,Q-Qref)T,则有功、无功功率计算公式可表示为二输入二输出的仿射非线性模型:
(8)
2.2 精确线性化条件分析
对于系统(8),如果:
①矩阵D=(g1,g2,adfg1,adfg2)的秩等于2,
②集合D1={g1}、D2={g1,g2}、D3={g1,g2,adfg1}、D4={g1,g2,adfg1,adfg2}在x=x0处都对合,则该系统可以精确线性化[15]。
根据式(8),可以计算出李括号
因此,可得矩阵
(9)
该矩阵秩为2,满足精确线性化条件①;同时由式(9)可得,g1、g2、adfg1、adfg2中不包含与状态变量相关项,可以看作恒向量场,因此集合D1、D2、D3、D4是对合的,满足精确线性化条件②。系统可以实现状态反馈线性化。
接下来根据式(8)可求得李导数,从而判断相对阶。
对于y1=h(x1),
(10)
同理,对于y2=h(x2),
(11)
因此,可得关系度判断矩阵
(12)
由式(10)、(11)可知,输出y1、y2对应的子相对阶λ1=1、λ2=1;同时,式(12)为非奇异矩阵。所以系统相对阶λ=λ1+λ2=2,与系统阶数相等,满足精确线性化解耦的条件。
2.3 反馈线性化控制律的设计
进行坐标变换[16],选取
(13)
式中,
由式(13)可知,反馈线性化控制律为
u=g(x)-1[v-A(x)],
(14)
新控制量设计为
(15)
式中,sat(y1)和sat(y2)为饱和函数,y1=P-Pref,y2=Q-Qref。
最终,由式(14)、(15)可得解耦控制器的表达式为
(16)
3 电压外环控制器设计
GSC主要目标是实现直流母线电压的稳定,由式(3)可知,Udc与直流侧功率Pdc有关,在系统稳定时,交、直流两侧功率相等,即Pg=Pdc。此时,Pg与Udc关系已经建立,即电压外环的输出即为内环的输入。
令外环电压给定量为Udc,ref,选取滑模面函数[17]
S=Udc,ref-Udc,
(17)
用指数趋近律设计电压外环:
(18)
式中,K3、K4为控制参数。系统稳定运行时,有
(19)
将式(19)代入式(17)可得
(20)
由式(18)、(20),再结合(3)式中直流侧功率表达式得到电压外环的控制方程为
Pref=Pdc=(C(K3S+K4sat(S))+iload)Udc。
(21)
4 LESO及补偿环节设计
4.1 LESO设计
在实际的系统中存在未建模部分且数学模型中也有激励变量项,这就使系统的实际输出与期望值难免会有偏差。因此,应用状态观测器对不确定性进行观测,并对其偏差进行补偿来使控制结果更加精确。
设计式(6)为
(22)

选取状态变量:
(23)
则设计状态观测器为
(24)
式中,Z1=(Z1p,Z1q),Z2=(Z2p,Z2q),Z1是对X1的观测,Z1p、Z1q分别为Z1的有功、无功分量,Z2是对X2的观测,即对未建模等干扰项ξ的观测,β1、β2为观测器参数。
最终,可以得到新的控制律:
(25)
被控参数uα、uβ变为
(26)
4.2 功率补偿环节
虽然在系统稳定时有Pg=Pdc,但是由式(21)可知,外环运行后Pg才得到调节,因此,Pg的变化要落后于Pdc的变化,从而在功率发生变化时,母线电压有波动产生。电压外环的设计能够改善电压波动,但是由于滑模非线性的特点也会给功率带来超调。现基于LESO,根据有功功率观测值,计算出功率变化时的功率差,然后对功率进行补偿,从而改善功率突变的超调。
定义功率差为
ΔP=k(Udciload-Z1p),
(27)
式中,k为功率补偿系数。将式(27)补偿到Pref,得到新的有功功率期望值:
最终控制框图如图2所示。

图2 DFIG-GSC控制框图
5 稳定性分析
5.1 LESO稳定性分析
对式(24)进行拉氏变换,得
(28)
式中,s为微分算子。由上式可得系统的闭环特征方程为
s2+β1s+β2=0,
(29)
由劳斯判据可知,β1,β2>0时,系统稳定。
5.2 滑模控制稳定性分析
对于电压外环,选取Lyapunov函数为
对上式求导可得:
(30)
代入式(18)可得:
(31)

在反馈线性化控制律中,与电压外环同理可证得,当系数k11、k12、k21、k22均为正数时,系统稳定。
6 仿真分析
为了验证所提控制方法的有效性,在MATLAB-Simulink平台中搭建了反馈线性化直接功率控制方法下的GSC模型。选取GSC额定容量为360 kVA,令系统刚开始运行在半载状态(即容量为180 kVA),0.25 s时切换至满载,并将本文所提控制方法与传统的PI控制以及直接功率控制进行对比,表1、表2分别为DFIG-GSC仿真参数和控制参数,表中,kpu、kiu、kpi、kii为PI控制中外环、内环控制参数,ku1、ku2、kp1、kp2为DPC方法中的外环、内环控制参数。

表1 DFIG-GSC仿真参数表

表2 DFIG-GSC控制参数表
图3分别为三种控制方法下交流侧电流仿真图,从图中可以看出,三种控制方法下系统稳定运行时,电流三相对称,正弦度良好。0.25 s负载发生变化时,采用矢量PI控制策略,系统达到稳定的时间要明显长于另外两种方法;传统的DPC和本文提到的FL-DPC都能快速稳定,但是,传统的DPC超调量为6.2%,本文所用方法对电流超调有抑制作用。在负载变化后,系统稳定运行时,图3(a)、(b)、(c)三种策略下电流的总谐波畸变率(Total Harmonic Distortion,THD)分别为3.6%、3.56%、1.37%,可见该方法有效降低了电流THD。
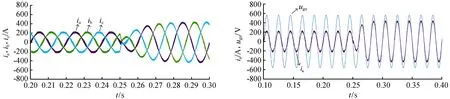
(a) PI电流 (a) PI a相电流与电压
图4为三种控制方法下a相电流与电压图。从图中可以看出,三种控制方法下a相电流与电压均同相位,即功率因数为1,满足了GSC单位功率运行的要求。
图5为三种控制方法下直流电压仿真对比图。从图5(a)可以看出,在0.25 s由满载切换为半载以后,三种控制策略下系统直流电压都可以达到稳定状态。采用PI控制,系统动态响应时间为0.13 s,且电压下降了135 V;采用DPC和文中所用方法动态响应时间均有明显减少,分别为0.01 s和0.02 s,同时直流电压下降值也有了明显减少,分别为7.6 V和4.7 V。且由图5(b)可以看出,采用文中所提控制方法的电压波形更为光滑、平稳。由此可见,本文所提控制方法直流电压的动态响应性能更佳。
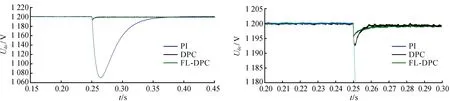
(a) 直流电压 (b) 直流电压局部放大图
图6为三种控制方法下输出有功、无功功率图。由图6(a)、(b)、(c)可知,面对负载突变,PI控制下有功功率动态响应时间较长,DPC和本文控制方法有功功率均能快速切换到满载状态,但是,本文所用控制方法相较于DPC,有功功率超调明显减少。图6(d)、(e)、(f)表明,在负载变化时,PI控制下无功功率略有偏移,另外两种控制均保持稳定;且本文所用控制方法无功功率抖振明显减小,波形更加平稳光滑。

(a) PI有功功率 (d) PI无功功率
7 结论
针对两相静止坐标系下的DFIG-GSC以功率为变量的数学模型中存在强耦合问题,应用精确反馈线性化进行解耦,得到系统的线性化模型。应用观测器对其内部参数和不确定项进行观测,并对其控制量进行修正,在此基础上增加有功功率补偿来减小滑模控制带来的有功功率超调。仿真结果表明,本文所提控制方法满足GSC单位功率运行的要求,且直流电压能够稳定。相比于传统的PI矢量控制和DPC,在负载变化时直流侧电压稳态、动态性能更佳;交流侧电流THD明显降低,此外,交流侧电流和有功功率的超调都有所下降。
猜你喜欢
石油沥青(2021年1期)2021-01-11
中等数学(2020年2期)2020-08-24
中医眼耳鼻喉杂志(2019年2期)2019-04-13
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
测控技术(2018年9期)2018-11-25
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
焊接(2015年5期)2015-07-18