基于滑窗OPTICS算法和DATA-SSI算法的桥梁模态参数智能化识别
2024-04-20 11:26:28陈永高钟振宇罗晓峰
振动与冲击 2024年7期
陈永高, 钟振宇,2, 罗晓峰,2
(1.浙江工业职业技术学院 建筑工程学院,浙江 绍兴 312000; 2.浙江大学 建筑工程学院,杭州 310058)
桥梁结构在环境激励的长期影响下,尤其是在地震作用下,其结构自身的耐久性和安全性将受到不同程度的影响[1]。现阶段,关于桥梁结构健康监测的相关理论和方法已基本成熟,其中模态参数识别算法[2]已被广泛运用于结构动力分析中,其基本原理是:先利用传感器采集结构的振动信号,再采用相关算法对信号进行数据分析处理以获得结构自身的模态参数(固有频率、阻尼比及模态振型)[3],最后通过对这些参数结果做对比分析以辨识结构的实际运用状态。
现阶段,基于数据驱动的随机子空间(data-driven stochastic subspace identification, DATA-SSI)算法[4]被广泛运用于识别桥梁结构的模态参数,但随着众多学者对该算法的深入研究,发现其主要缺陷在于需人工辨识稳定图中的真假模态[5],这样不仅降低识别效率,还影响结果的准确性。
关于如何改进现有的DATA-SSI算法,已有不少学者进行了相关研究,包括:Bakir[6]提出可基于模态相位来对模态参数结果进行一定的量化,实现稳定图中真假模态的自动化筛选;孙国富[7]将多参考点最小二乘复频域法(poly reference least squares complex frequency, P-LSCF)运用于辨识稳定图中的真假极点。同时,不少学者通过将聚类算法[8]引入到模态参数中来实现模态的智能化筛选,包括: Ubertini等在模态参数识别算法中引入聚类分析算法;姜金辉等[9]在稳定图分析中引入模糊聚类算法,以选取每类最佳极点作为最终的结构真实模态;汤宝平等[10]在模态参数识别过程中引入谱系聚类算法;李玉刚等[11]在模态参数识别过程中引入K-means算法(K-均值算法,是一种基于划分的聚类算法,以距离作为数据对象间相似性度量的标准);单豪良等[12]通过将DBSCAN(density-based spatial clustering of application with noise)密度聚类算法运用到确定随机子空间算法中,以实现稳定图中模态参数的自动化识别。经分析,这些算法均处于半自动化状态,主要原因在于需人为提前就聚类数目或迭代次数等相关参数进行设定。
为实现环境激励下桥梁结构模态参数的全智能化识别,本文提出对DATA-SSI算法的输入信号进行合理的滑窗处理,再结合OPTICS(ordering points to identify the clustering structure)密度聚类算法实现众多稳定图中稳定轴的聚类处理,以达到实际桥梁结构模态参数在线智能化识别的目的,提高参数识别的效率和准确性。
1 密度聚类算法
聚类算法之所以被广泛应用于稳定图中真假模态的辨识,主要是因为该算法是一种无监督机器学习算法,可以将具有相同特征的数据聚集为一类,将特征相异的数据分开。现阶段,常用的三种聚类算法包括:
(1) 分层聚类算法:基本原理是对所有数据进行逐层分类处理,直到聚类所得结果满足人为事先确定的某种条件为止。
(2) 划分聚类算法:基本原理是对所有数据进行簇数的预设划分处理,并假定各簇数的中心点,同时对该中心点进行更新,通过反复迭代的方式使得同一簇种的数据特征相近,非同簇中的数据特征相异,直至中心点不再更新为止。(需要事先指定簇类的数目或者聚类中心,通过反复迭代,直至最后达到“簇内的点足够近,簇间的点足够远”的目标)。
(3) 密度聚类算法[13]:基本原理是通过相关算法实现空间中密集点和稀疏点的辨识,将紧密地在一堆的点组合起来,将其它点定义孤立点。
经对比分析三种聚类算法各自的优缺点,本文选择密度聚类算法作为基础算法,该算法相比其它两种算法的特点在于:密度聚类不会因为所需聚类数据的增加而降低聚类效果,且所需确定的初始参数最少,对数据的先后顺序无具体要求,能处理高维度的数据。
单豪良等所提算法虽然能在一定程度上提高模态参数识别的精确性,但其依然存在缺点,即该算法中邻域半径(Eps)为定值,当所需聚类的数据点密度存在不均匀现象时,一旦设置的Eps数据较小,将会导致较稀疏的聚类簇中的节点密度会小于密度阈值(MinPts),则其会被认为是边界点;当设置的Eps数据较大时,将会导致较密集且离得比较近的簇点容易被划分为同一个聚类簇。
鉴于稳定图中的数据点为高维数据(包括固有频率值、阻尼比及模态振型),且数据点呈现密度不均的现象,所以采用DBSCAN算法[14]具有一定的局限性。于此,本文将引入OPTICS算法[15],该算法实质上是DBSCAN的一种有效扩展,两种算法的基本思想是相同的,但OPTICS算法使得基于密度的聚类结构能够呈现出一种特殊的顺序,该顺序所对应的聚类结构包含了每个层级的聚类的信息,且便于分析,使得聚类结果对输入参数不再敏感。
以下将首先分析OPTICS算法中的相关定义,其次详细介绍该算法涉及的Eps和MinPts,最后简要介绍该算法的实现流程。
1.1 OPTICS算法的相关定义
假定数据集X={x(1),x(2),…,x(N)},涉及的两项参数分别为邻域半径(Eps)和密度阈值(Mpts)。
定义1:邻域半径。该半径是以点P为中心点,满足
NEps(p)={q∈X|d(p,q)≤Eps}
(1)
定义2:距离。点q与点P间的距离值d(p,q),其中p=(p1,p2,…,pn),q=(q1,q2,…,qn),鉴于两对象为一维向量数据集,可采用欧几里得函数求解距离值
(2)
定义3:核心对象。基于式(1)计算数据集X中的对象P的邻域半径,当满足式(3)时,可判定该对象为核心对象。
|NEps(p)≥Mpts|
(3)
定义4:核心距离。假定x作为核心点,找到以x点为圆心,且刚好满足最小邻点数Mpts的最外层一个点为x′,则x点到点x′的距离为核心距离。数学定义如下
(4)
定义5:密度。假设x∈X,ρ(x)代表x的密度,取值为整数值,且与邻域半径存在直接关系,满足
ρ(x)=|NEps(x)|
(5)
定义6:密度直达。若q∈NEps(p),并满足式(3),则称q密度直达p。
定义7:密度可达。若存在链p1,p2,…,pn∈X,其中,pi(0 定义8:密度相连。若对象o∈X,使得p从q是从o密度可达的,则定义p和q是密度相连的。 定义9:簇。非空集合C满足C⊂X,并满足如下两条件,可将非空集合C定义为X一个簇: (1) 若p∈C,且q是从p密度可达,则q∈C (2) 若p∈C,q∈C,则p,q属于密度相连 定义10:噪声点。若p不属于任何一个簇,则其为噪声点。 (1) 邻域半径阈值 相比DBSCAN算法,OPTICS算法对输入参数并不敏感,即可将其取值定义为式(2)计算所得距离值d(p,q)的最大值,代表所有的点都属于核心点。 (2) 密度阈值 在确定该阈值前,需对稳定图方法进行一定了解,稳定图方法的基本原理——无需事先预估结构系统的真实模态阶数,是通过假定该结构系统存在很多不同的阶数,并分别计算各阶次情况下结构的模态参数结果,最终以模态参数结果为横坐标,系统阶数为纵坐标。因为结构的真实物理模态具有稳定性,会一直以相似的模态重复出现,并在二维图形中形成竖向的稳定列,被定义为稳定轴;而虚假模态具有不稳定性,呈现随机出现的状态,以致无法形成稳定轴。 为保证筛选出的稳定轴为“结构的真实稳定”,结合统计学中的置信区间[-0.95,0.95],构建式(6)确定密度阈值 Mpts=INT[(Jmin-Jmax+1)×0.95] (6) 式中:Jmax和Jmin分别为稳定图中系统阶次的最大值和最小值;INT[·]为取整数。 对于数据集X={x(1),x(2),…,x(N)},OPTICS算法的目标是输出X数据对象的两个特征,即输出次序和可达距离,具体如下: 采用OPTICS算法对数据集进行聚类处理时,具体实现流程如下: 步骤1:准备阶段 设定邻域半径(Eps)和密度阈值(Mpts)。 步骤2:实施阶段 (3) 确定该点直接密度可达的点中可达距离最小且未处理的点,并将其列入结果队列中。 (4) 重复步骤2中的第(2)步,直到该点直接密度可达的点均被处理。 (5) 处理完数据集中所有点,赋予第一个点的可达距离为其它点中最大可达距离的1.1倍,算法结束。 实际工程中,若仅常用OPTICS算法对单幅稳定图所对应的模态参数结果进行聚类,则聚类所得真实模态不具代表性,且无法真实反映结构在长时间内的真实模态。因此,可通过识别同一结构在连续时间段内的多幅稳定图,以总结真实模态在各稳定图中存在的规律。为实现连续时间段内的模态参数识别,需对输入信号进行合理的划分,以下将从三个方面详细论述如何实现信号的合理窗口划分,包括窗口函数的确定,窗口大小的确定以及窗口滑动步长的确定。 矩形窗函数相比其它窗函数(汉宁窗、海明窗及平顶窗等)而言,具有简单易操作的特性,同时其时间变量属性为零次幂,主瓣会更集中,识别稳定图中的数据点具有可行性。 矩形窗函数公式如下 w(t)=1 (7) 基于DATA-SSI算法的参数识别,当被识别的信号过长时不仅耗时,且容易识别出虚假模态;当被识别的信号过短时,则容易出现真实模态漏判的现象。因此,可通过如下流程确定单次模态参数识别的合理信号长度: (1) 任意假定初始的1号窗口Win1=(x1,x2,…,xn),xi代表该窗口中的第i个数据点,共有数据点n个。 (2) 采用DATA-SSI算法识别窗口Win1,得到模态参数结果R1={f1,ξ1,ψ1} f1=f1(m,n), ξ1=ξ1(m,n), ψ1=ψ1(m,n,q), m=1,2,…,M, n=1,2,…,N, q=1,2,…,Q。 (8) 式中:f1、ξ1、ψ1分别为窗口Win1的频率值、阻尼比及模态振型结果;(m,n)为频率和阻尼比结果为二维数据矩阵;(m,n,q)为模态振型结果为三维数据矩阵;M为频率矩阵中最大的行数;N为结构的真实系统阶数;Q为布置在结构上的总传感器个数。 (3) 提取并保存第1阶频率值f1-1=f1(1,i)(i=1,2,…,N)、第2阶频率值f1-2=f1(2,i)(i=1,2,…,N)、第3阶频率值f1-3=f1(3,i)(i=1,2,…,N)。 (4) 对窗口Win1进行扩展(增加窗口内的信号长度)得到2号窗口(Win2),并基于步骤(2)和(3)识别得到Win2的前三阶固有频率模态值f2-1,f2-2,f2-3。 (5) 对窗口进行不断扩展,并基于上述相同的原理,依次得到各自窗口对应的前三阶固有频率值,假定窗口Wini的前三阶固有频率模态值为fi-1,fi-2,fi-3。 (6) 交替求解相邻两窗口前三阶频率模态值的相似度,以计算1号窗口第1阶频率值(f1-1)和2号窗口第1阶频率值(f2-1)为例,通过式(9)得到1号和2号窗口频率参数结果在第1阶的相似度f(1,2,1)。 (9) 假定f(i,i+1,l)为第i号和第i+1号窗口频率参数结果在第l阶(l=1,2,3)的相似度。基于统计学中95%置信区间的原理,寻求当连续4个窗口对应的3个相似度[f(i,i+1,l),f(i+1,i+2,l),f(i+2,i+3,l)](l=1,2,3)均处于95%时,即代表窗口大小的改变已不再会引起频率值的变化,则可确定Wini对应的合适的窗口大小。 当窗口大小确定后,还需进一步确定相邻两窗口之间的滑动步长,即确定后一个窗口与相邻前一个窗口之间的重叠占比。鉴于DATA-SSI算法在计算Hankel矩阵[17]时,将过去和将来的信号设定为相等的长度,因此,本文将滑动步长设定为每个窗口的一半长度。窗口滑动步长示意图,如图1所示。 图1 窗口滑动步长示意图Fig.1 Schematic diagram of window sliding step 实际工程中,若仅采用DATA-SSI算法识别结构模态参数,则需面临稳定图中稳定轴需人为参与辨识的问题,以致存在如下问题: (1) 因不同用户自身对稳定图认知的程度不同,导致在筛选真假模态时出现一定的主观性和差异性。 (2) 当需要对大量稳定图进行人工识别时,其工作效率不高。 (3) 因无法实现稳定图中真实模态的智能化辨识,以致无法实现对实际结构进行在线实时监测。 针对传统DATA-SSI模态参数识别算法存在的上述弊端,本文结合“滑窗机制原理”和“OPTICS算法”提出了一种新的模态参数识别算法ICDATA-SSI(identify clustering data-driven stochastic subspace identification),以实现模态参数在线实时监测的目的。具体实现步骤如下: 步骤1:数据集准备 假定布置在桥梁结构上的传感器个数为Q,收集并储存结构对应的所有振动信号X=(i,j)(i=1,2,…,L;j=1,2,…,Q),其中L为信号采集时间段(T)内的数据点数,假定fs为采样频率,则: L=T×fs (10) 步骤2:窗口数据准备 (1) 以X=(i,j)为信号滑窗对象,提取其中最靠前的一段时间T1(以“秒”计)对应的数据点为1号窗口,得到数据集Win1=(i,j),满足式(11) i=1,2,…,T1×fs j=1,2,…,Q (11) (2) 基于2.2节原理,确定最佳的窗口大小,假定最佳窗口大小对应的采样时间为Ts,即每个窗口的数据点数BC=Ts×fs。 (3) 确定总的窗口个数NN,公式如下 (12) 式中,INT[·]代表取整数。 (4) 确定窗口滑动步长为BC/2。 步骤3:各窗口模态参数计算 采用DATA-SSI算法对NN个窗口对应的振动信号进行模态参数识别,并储存所有的模态参数结果Ri={fi,ξi,ψi}(i=1,2,…,NN)。 步骤4:单次聚类分析 1) 频率聚类 (1) 频率邻域半径计算 采用式(11)计算两模态中频率值间最远的距离,并将其定义为频率邻域半径,以保证稳定图上的所有点均为核心点,公式如下 Eps=max[d(f1-1,f2-1)]= (13) 注意需结合式(8)进行上述计算。 (2) 密度阈值计算 (3) 频率聚类结果 i=1,2,…,N (14) 式中,N为结构的真实系统阶数。 2) 模态振型聚类 (1) 振型邻域半径计算 因模态振型的组成不同于频率值,频率值为具体的数据,而模态振型涉及特征向量,需重新计算模态振型参数对应的邻域半径(Eps)。可采用式(15)计算两模态中模态振型间最远的距离,并将其定义为振型邻域半径,以保证稳定图上的所有点均为核心点,公式如下 Eps=max[d(ψ1-1,ψ2-1)]= (15) (2) 模态振型聚类结果 i=1,2,…,N (16) 式中,N为结构的真实系统阶数。 步骤5:1号和2号窗口间多次聚类分析 步骤6:相邻窗口间多次聚类分析 步骤7:汇总聚类结果 (2) 结合统计学中两数据相似的判别原理,可认定每一阶对应的聚类窗口的个数占比大于等于 0.8Nmax时,可将该阶模态定义为结构的真实模态。 (3) 计算各阶次真实模态中频率值在所有聚类窗口中的“平均值”,并绘制于稳定图中,获得最终的聚类稳定图。 综上可知,经过步骤1~步骤7便能实现滑窗技术、OPTICS聚类算法及DATA-SSI识别算法的有机结合,实现桥梁结构模态参数的智能化识别。为更直观地反映各步骤间的相互关系,绘制了图2所示流程图。 图2 ICDATA-SSI模态参数智能化识别流程图Fig.2 Flow chart of intelligent identification of ICDATA-SSI modal parameter 为验证本文所提算法能有效识别稳定图中的真实模态,现通过MIDAS软件建立一跨钢筋混凝土简支梁作为试验对象。简支梁桥长30 m,主梁共10个单元;桥面宽930 cm,梁高170 cm,梁底宽460 cm,截面为单箱单室,具体尺寸如图3所示。 (a) 简支梁桥 (b) 截面图(cm)图3 简支梁桥模型Fig.3 Mode of simply supported girder bridge 为获取该简支梁的振动响应信号,可在主梁各单元衔接点处施加竖直向下的白噪声激励,以模拟实际工程中的环境激励。其中采样频率为100 Hz,采样时间为10 min,图4为第1分钟白噪声激励的时间曲线图。 图4 白噪声激励(第1分钟)Fig.4 White noise excitation (in the first minute) 采集各节点在白噪声激励下的振动响应信号,图5为其中3号节点、6号节点及9号节点对应的竖直向加速度响应信号的时间曲线图。 (a) 3号节点 (b) 6号节点 (c) 9号节点图5 节点加速度响应Fig.5 Node of acceleration response 采用DATA-SSI算法识别出该简支梁在第1分钟内的稳定图,如图6所示。根据图6可知,其中的第1阶真实模态(3.4 Hz左右)的稳定轴很清晰,第2阶真实模态(12.7 Hz左右)则被隐藏在虚假模态中,第三阶模态(27.1 Hz左右)也被隐藏在虚假模态中。 图6 稳定图1Fig.6 Stability diagram 1 基于第3章步骤2的算法步骤,可确定合理的单次信号窗口时间长度在25 s,则可将10 min的信号分为24个连续窗口。采用DATA-SSI算法识别出各窗口振动信号的稳定图,图7为第1个窗口对应的稳定图。对比分析图6和图7可知,对信号输入长度进行合理的窗口划分能够在一定程度上剔除虚假模态,保留真实模态。 图7 稳定图2Fig.7 Stabilization diagram 2 基于第3章中所提的步骤4~步骤7完成对本简支梁在10 min内共24个窗口信号(24幅稳定图)的密度聚类,并求解各聚类模态的平均值绘制到图8所示聚类稳定图中。对比图6、图7和图8可知,本文所提算法能精确地识别出桥梁结构的真实模态。 图8 稳定图3Fig.8 Stability diagram 3 为验证图2所示ICDATA-SSI模态参数智能化识别算法能够运用于实际桥梁结构的参数识别中,现以三峡大坝坝址上游一处大型斜拉桥为识别对象,其桥跨布置为149.00 m+330.00 m+149.00 m,其中主跨和边跨长度分别为330.00 m和149.00 m,桥面总宽度18.00 m,两侧均设置1.50 m宽的人行道。 该斜拉桥主梁上共设置11处加速度传感器,用于采集主梁在环境作用或列车作用的竖向加速度振动信号,对应的信号采用频率为20 Hz,即每一秒采集20次数据。图9为该斜拉桥的1/2桥型布置图,图中编号J1~J6为桥上加速度传感器的具体布置位置。图10为该斜拉桥在环境激励下随机提取到的连续200 s内的竖向加速度响应信号,纵坐标代表加速度数值。 图9 桥跨布置图(m)Fig.9 Layout of bridge span (m) 图10 振动信号时程图Fig.10 Time-distance chart of vibration signal 该斜拉桥索塔总高115.00 m呈倒Y型,桥面以上高度为82.40 m。涉及的主要材料包括钢筋混凝土和钢材,其中钢筋混凝土结构的弹性模量为2.06×105N/mm2,泊松比为0.17;钢材的弹性模量为3.43×104N/mm2,泊松比为0.30。全桥共涉及1 104个节点和1 028个单位,在图9中①和②的点均设置桥墩,墩底均按固结处理;桥梁的两端均放开顺桥向的约束以保证桥梁的正常伸缩。 该桥MIDAS设计模型如图11所示。基于MIDAS软件自带的特征值分析识别该斜拉桥的各阶竖向弯曲模态振型图,图12给为前四阶模态振型图。 图11 三维有限元模型(MIDAS)Fig.11 Finite element model of three-dimensional (MIDAS) (b) 二阶竖向弯曲振型 (c) 三阶竖向弯曲振型 (d) 四阶竖向弯曲振型图12 前三阶模态振型图(MIDAS)Fig.12 Modal shape of the first three orders (MIDAS) 为进一步验证MIDAS软件所得模态参数结果具有可靠性,相关检测单位对该斜拉桥进行了动力特性测试,具体试验项目包括跑车、刹车、跳车、脉动等。试验所采用的车辆相关参数如表1所示。该车型为双轴车,车辆根据前后轴质量不同分为5种工况。以下简要论述跳车试验的实现步骤和参数识别结果,具体如下: 表1 车辆相关参数表Tab.1 The relevant parameters of the vehicle (1) 确定测试截面位置 共对三个截面进行测试,分别为图9中的截面J3、J5和J6。 (2) 布置每个截面的测试点 按照图13所示测点位置,在每个截面上布置动应变测点和加速度测点。 注:“”为动应变测点;“”为振动加速度测点。图13 测点布置图(cm)Fig.13 Layout of monitoring points (cm) (3) 采集结构振动信号 分别在三个截面位置采用五种工况的“车辆荷载”进行跳车试验以使主梁产生一定的振动,并通过布置在截面上的“振动加速度传感器”采集振动信号,最后对信号进行分析计算识别出主梁的自振频率。对比五种不同车辆荷载工况下的结构自振频率,结果表明该主梁结构的固有频率值受车辆荷载的影响很小,图14为“加载编号B5”情况下的信号频谱分析结果,图15为对应的跳车自振频谱图。 图14 信号频谱分析结果Fig.14 Frequency spectrum of fluctuating signal 图15 实测跳车自振频谱图Fig.15 Measured natural vibration spectrum for stagger 以下将简要介绍如何将ICDATA-SSI算法运用于智能化识别该斜拉桥的模态参数,具体实现步骤如下: 步骤1:采集振动信号 通过事先布置在主梁上的11处加速度传感器采集该斜拉桥在任意一天24 h内对应的振动信号,并保存为信号矩阵X=[i,j],其中i代表具体的信号点数,即i=1,2,…,1 728 000,j代表传感器个数,即j=1,2,…,11。 步骤2:确定窗口大小和滑窗步长 基于第3章步骤2的算法步骤,确定单个窗口大小为20 min,即每个窗口的输入信号矩阵为24 000×11,24 000代表20 min采集到的振动信号个数,11代表传感器总数。滑窗步长为单个窗口的一半长度,对应12 000个测点数。 步骤3:各窗口模态参数识别结果 采用DATA-SSI算法识别各窗口振动信号的稳定图,图16为任意四个窗口对应的稳定图。由图16可知,结构的真实模态是以相似或者相同的方式不断重复出现,而虚假模态则出现随机性。 (a) 稳定图4(时间:01:00—01:20) (b) 稳定图5(时间:01:20—01:40) (c) 稳定图6(时间:01:40—02:00) (d) 稳定图7(时间:02:00—02:20)图16 稳定图Fig.16 Stability diagram 步骤4:确定邻域半径和密度阈值 在采用DATA-SSI算法和OPTICS算法对各窗口的振动信号进行模态参数识别和密度聚类时,需分别采用式(6)、式(13)和式(15)计算各自对应的密度阈值、频率邻域半径和模态振型邻域半径。 步骤5:最终的聚类稳定图 基于第3章所提的步骤4~步骤7完成对本斜拉桥在一天24 h内共72个窗口信号(72幅稳定图)的密度聚类,并求解各聚类模态的平均值绘制到图11所示聚类稳定图中。 为进一步验证ICDATA-SSI算法智能识别所得固有频率值具有可靠性,现将图17中所得前9阶自振频率值与5.2节的MIDAS特征值分析结果,与5.3节该斜拉桥的动力特性实测结果进行差值百分比分析,结果如表2所示,对比分析各结果间的差值百分比可知,本文结果与动力特性实测结果在前9阶频率值间的差值百分比范围为[-4.34%,3.40%];与理论值结果间的差值百分比范围为[-4.62%,4.84%];与理论值和实际值的平均值间的差值百分比范围为[-4.09%,3.7%]。 图17 聚类稳定图Fig.17 Clustering stability diagram 表2 频率值对比分析表Tab.2 Comparative analysis table of frequency values 综合上述可知:本文所提ICDATA-SSI算法识别的结果与理论值(MIDAS有限元结果)以及实际值(现场动力特性实测结果)间的误差均在5%以内,可见本文算法所得结果具有可靠性,能够运用于识别实际桥梁结构的频率值。 结合第3章步骤4中第2)步所提“模态振型聚类”实现步骤,可知频率值和模态振型应具有相同的聚类属性,即模态频率值属于同类,则模态振型也应属于同类。于此,为进一步验证本文所提算法能识别出该斜拉桥的真实模态振型图,得到图18所示前三阶二维模态振型图和图19所示前三阶三维模态振型图。图18和图19中横坐标的数值从1~11,代表主梁上共设置的11处传感器,纵坐标为各点对应的归一化处理后的振型幅值。通过将这两幅模态振型图与图12所示MIDAS识别的模态振型图(理论值)进行对比分析,可知本文所提算法识别所得前三阶模态振型图与理论振型图具有95%以上的相似性,即表明本文算法可以运用于识别实际桥梁结构的模态振型,且识别结果具有可靠性。 (a) 一阶模态振型 (b) 二阶模态振型 (c) 三阶模态振型图18 二维模态振型图Fig.18 Modal shape (two-dimensional diagram) (a) 一阶模态振型 (b) 二阶模态振型 (c) 三阶模态振型图19 三维模态振型图Fig.19 Modal shape (three-dimensional diagram) 本文通过引入滑窗机制和密度聚类算法来克服SSI算法无法实现稳定图中真假模态的自动筛选,并将其运用于识别简支梁模拟试验和某实际大型斜拉桥的频率和模态振型。结果表明: (1) 本文所提滑窗原理能实现对输入信号的合理划分,能避免因单次输入信号过多引起的虚假模态,单次输入信号过少导致的真实模态遗漏现象。 (2) 密度聚类算法相比分层聚类和划分聚类算法具有一定的优势,主要表现在该算法不因输入数据的增多而降低聚类效果,初始输入参数最少,对数据的顺序无要求,能处理高维度的数据。 (3) 运用OPTICS聚类算法中的邻域半径和密度阈值能实现对稳定图中的模态参数的密度聚类。 (4) 识别所得某大型斜拉桥主梁的频率值结果与理论值(MIDAS有限元结果)以及实际值(现场动力特性实测结果)间的误差均在5%以内,且识别的模态振型图与MIDAS软件识别的模态振型图具有很高的相似性。 综上可知,本文所提基于滑窗技术和OPTICS密度聚类算法的改进DATA-SSI模态参数智能识别算法具有可靠性。1.2 参数设定
1.3 聚类流程


2 信号合理划分
2.1 滑窗算法选择
2.2 窗口大小确定
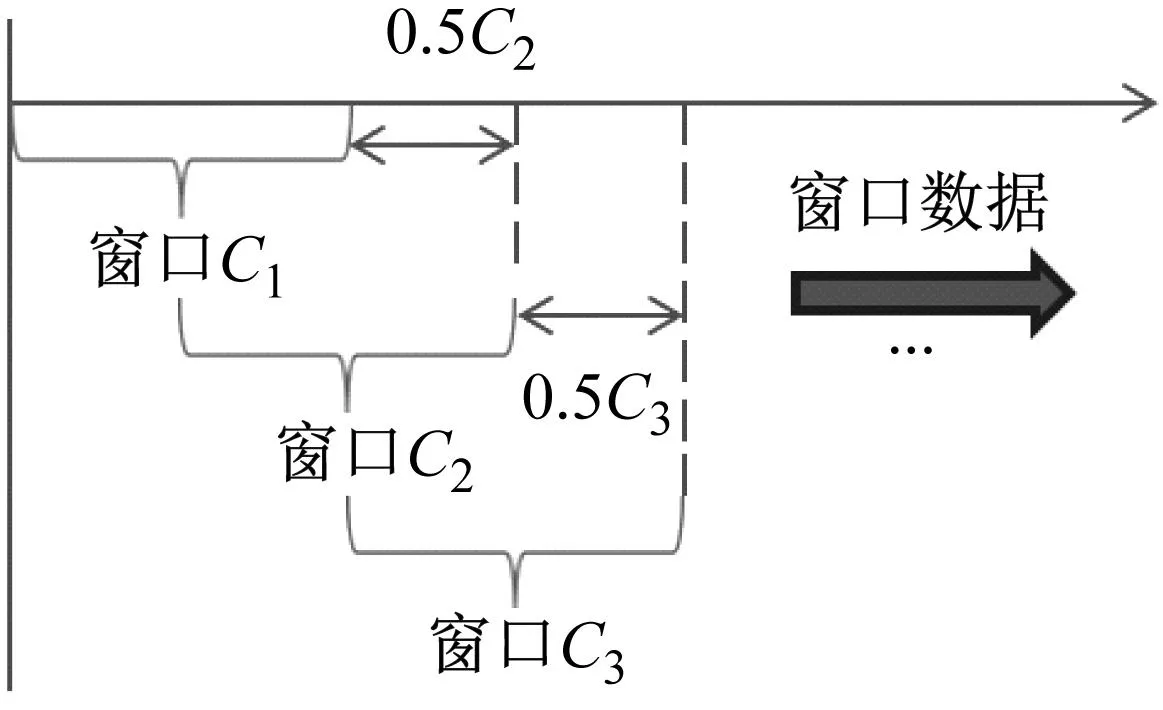
2.3 窗口滑动步长
3 改进DATA-SSI算法









4 模拟试验


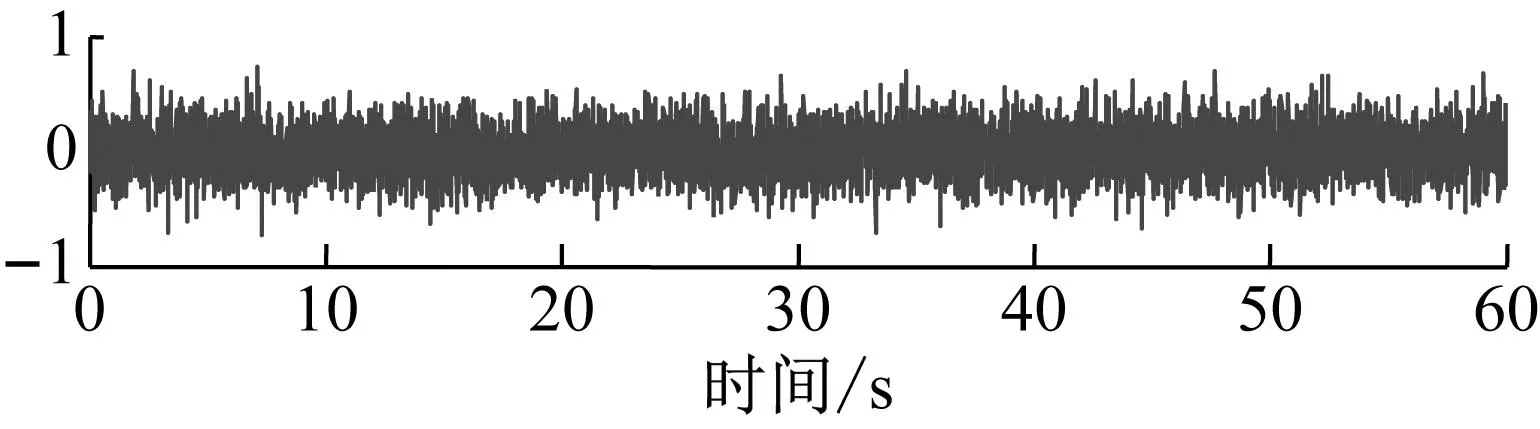
4.1 环境激励模拟
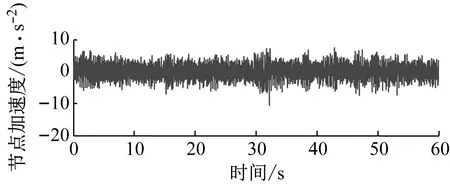
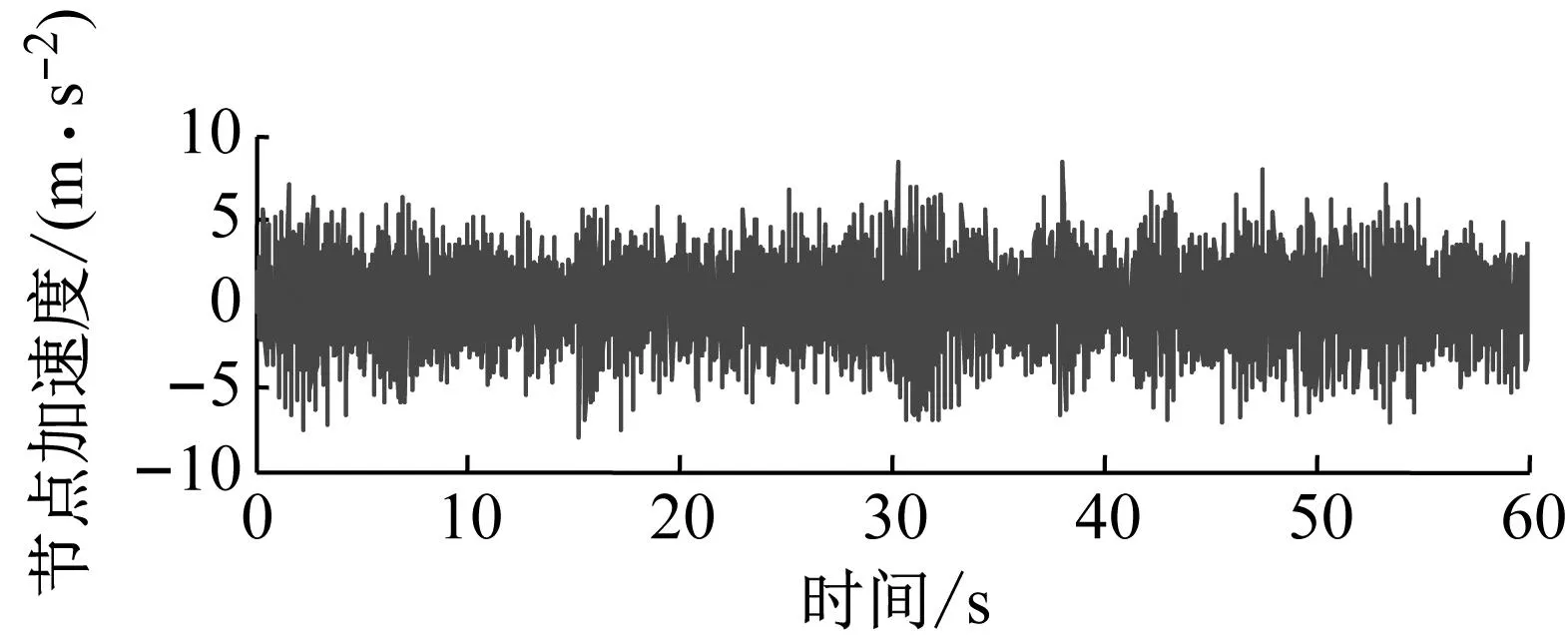
4.2 振动响应信号

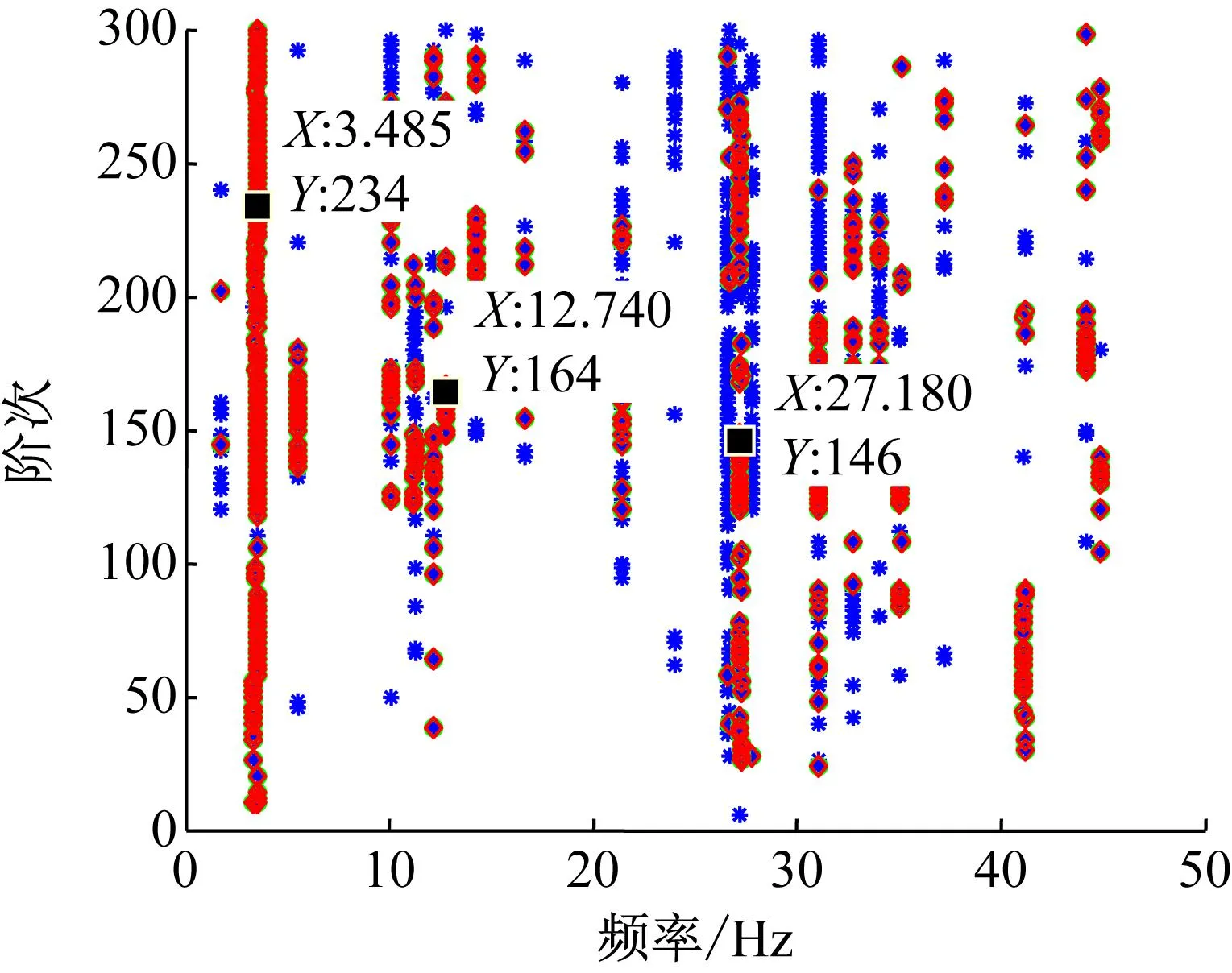
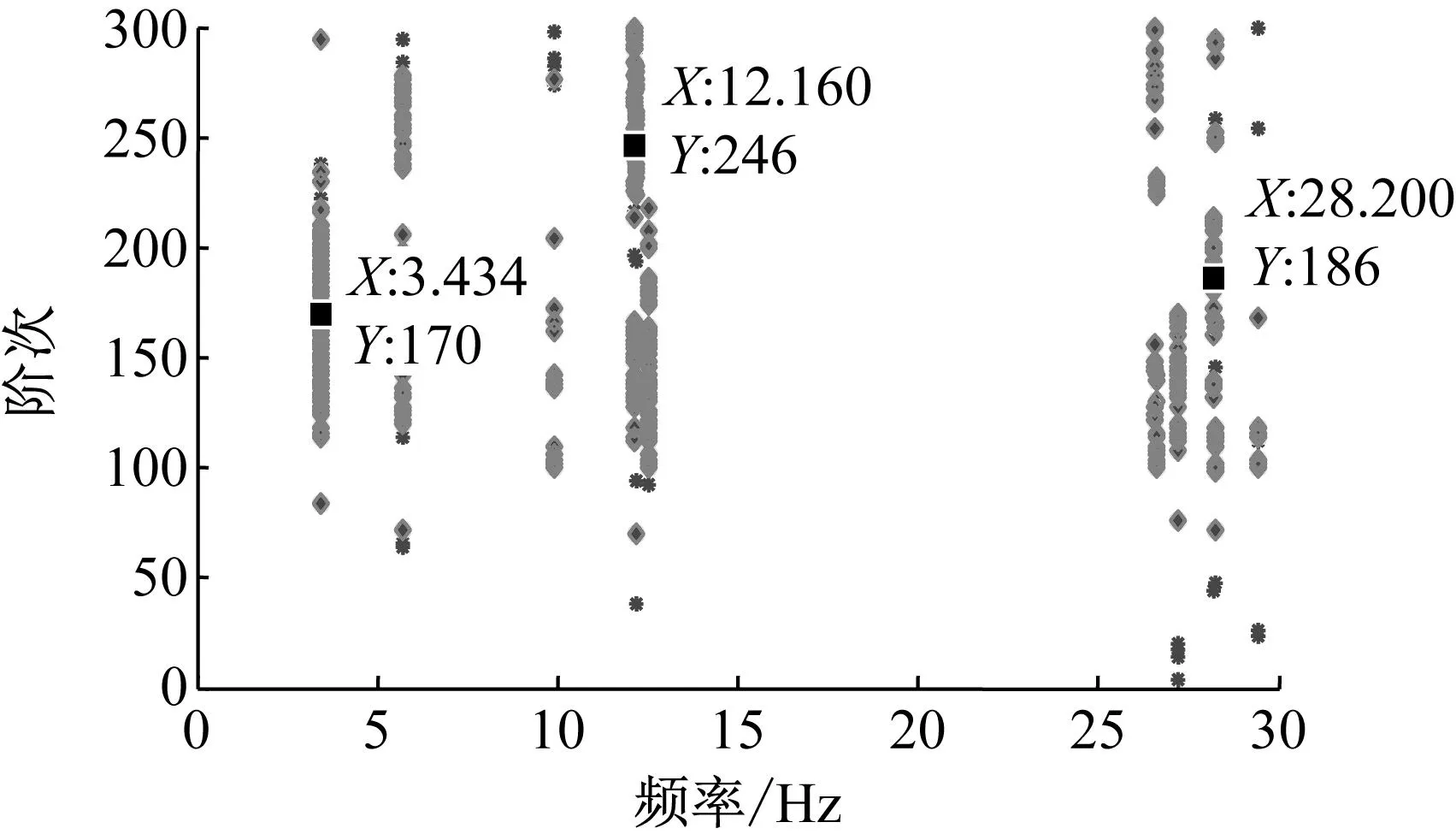
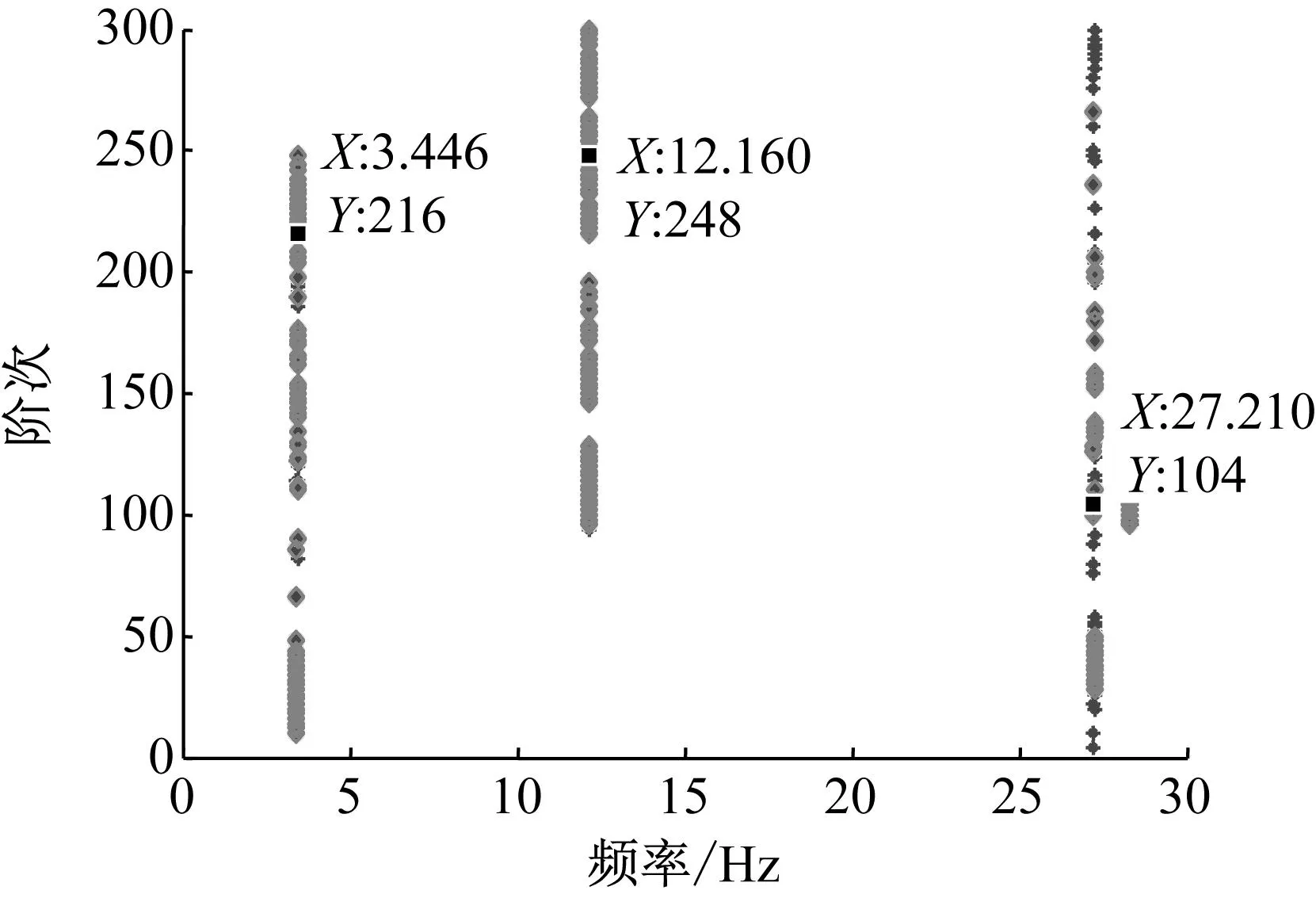
4.3 稳定图识别
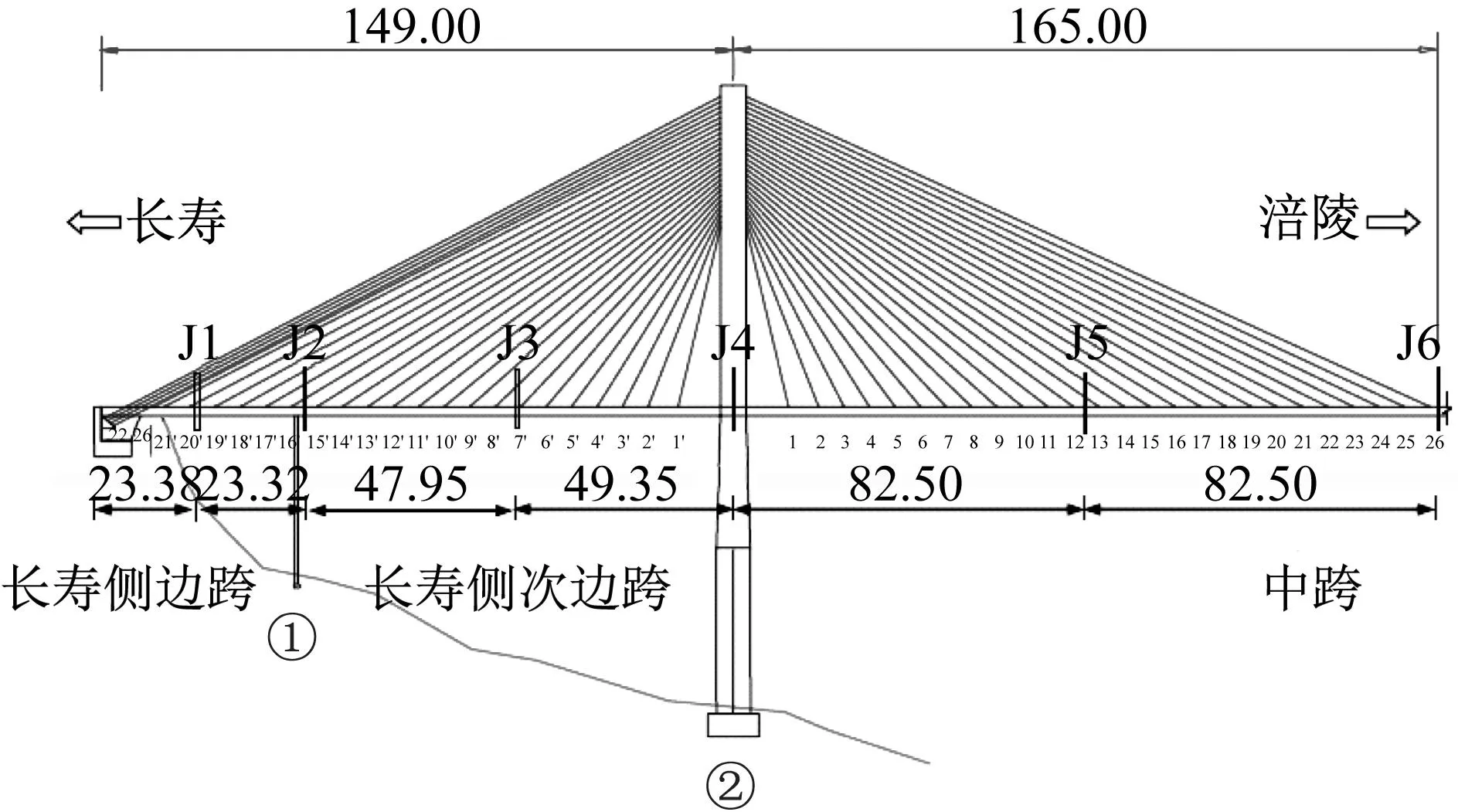
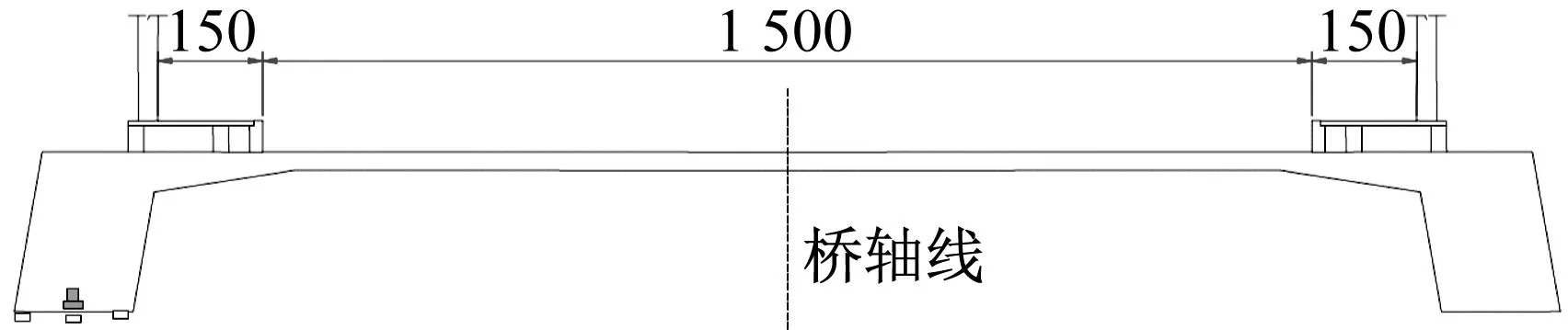
5 实际工程算例
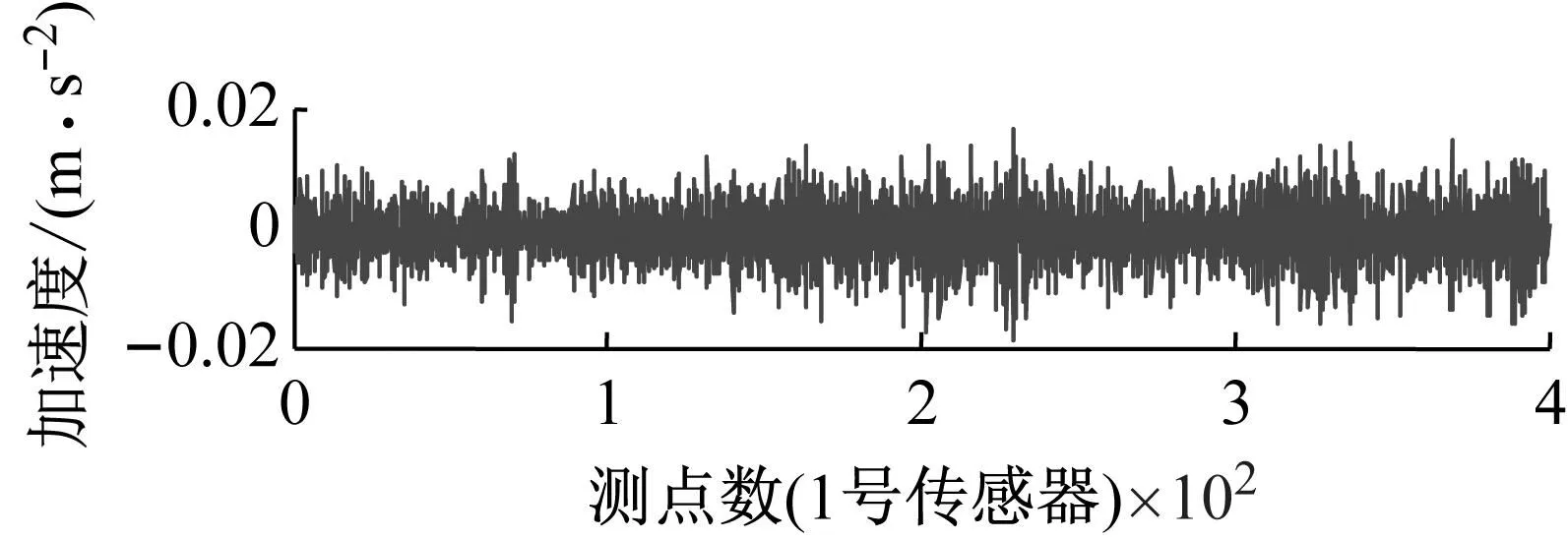
5.1 工程概况
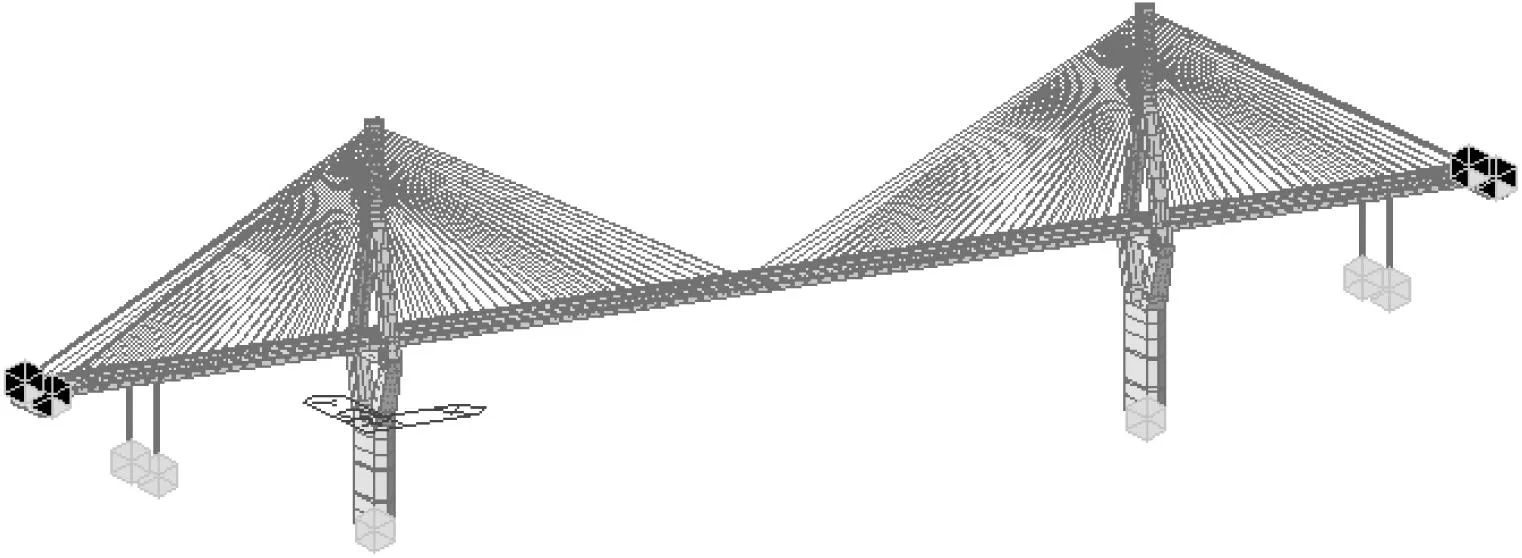
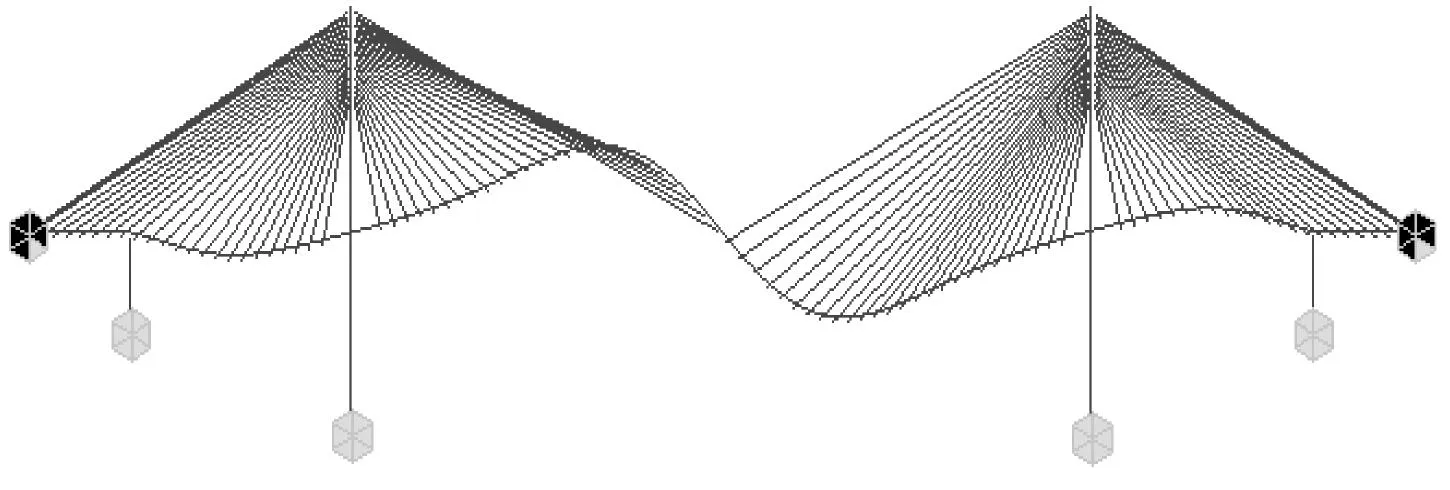
5.2 有限元计算结果
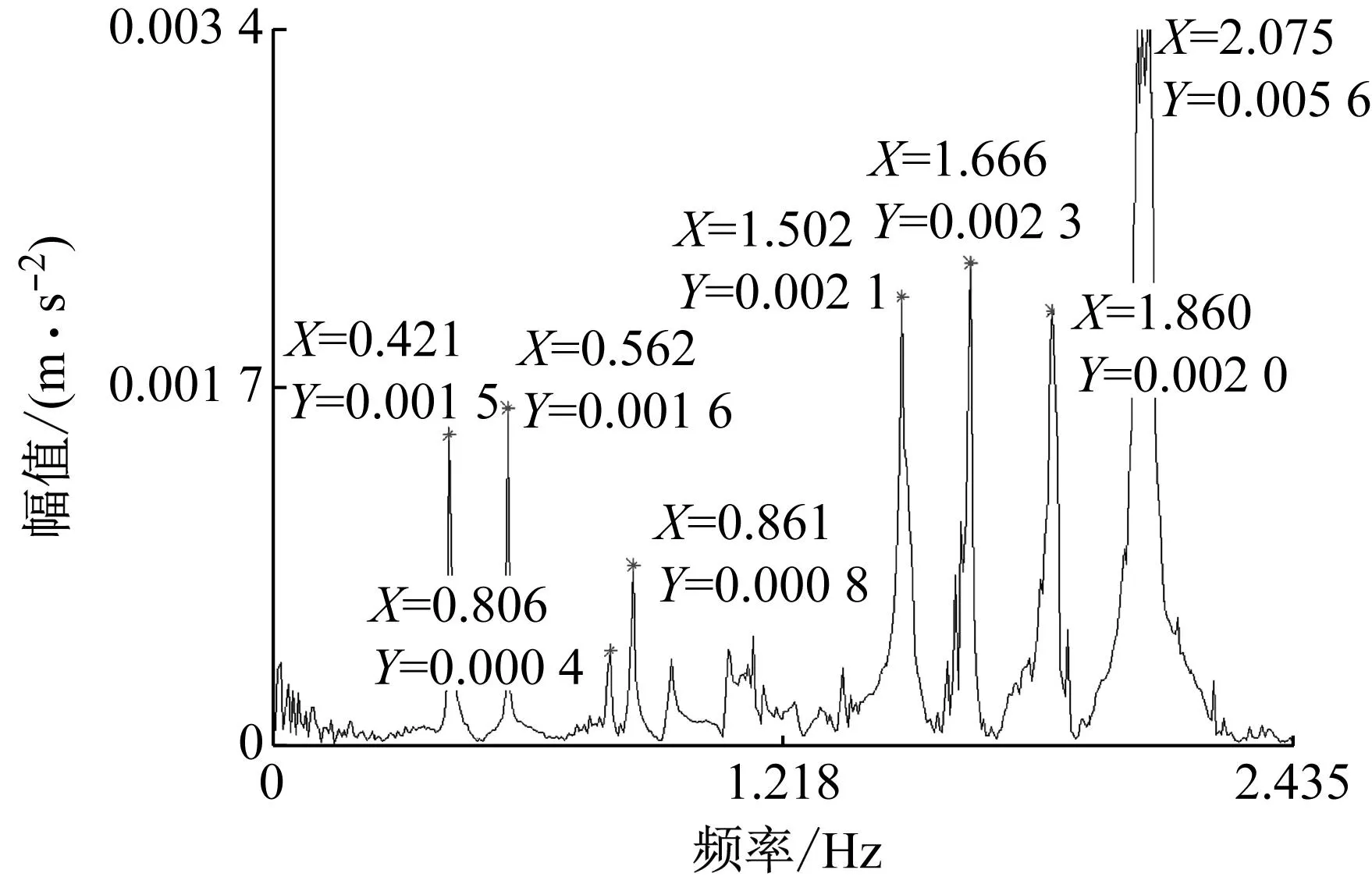
5.3 动力特性实测结果

5.4 自振频率结果

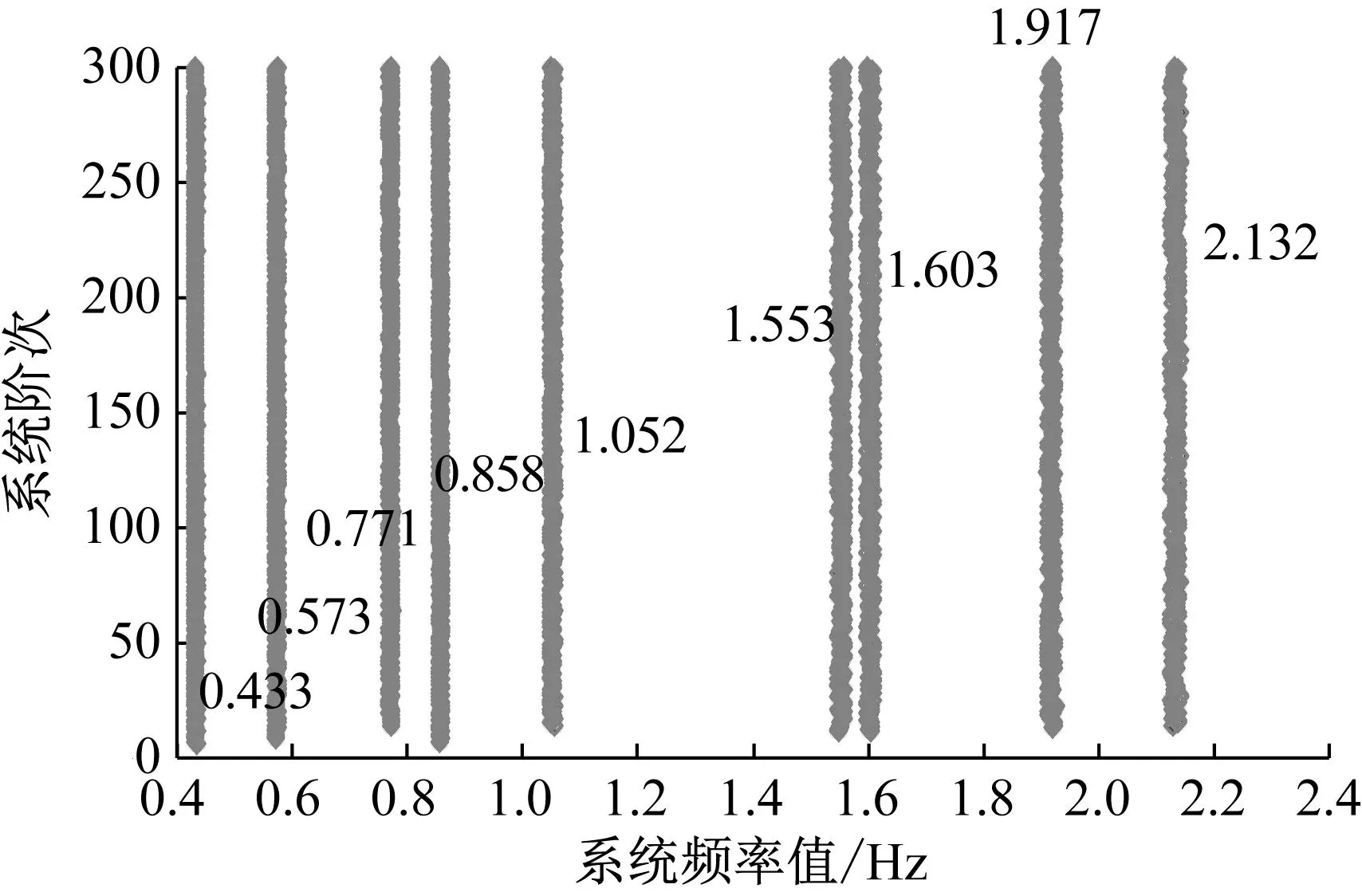
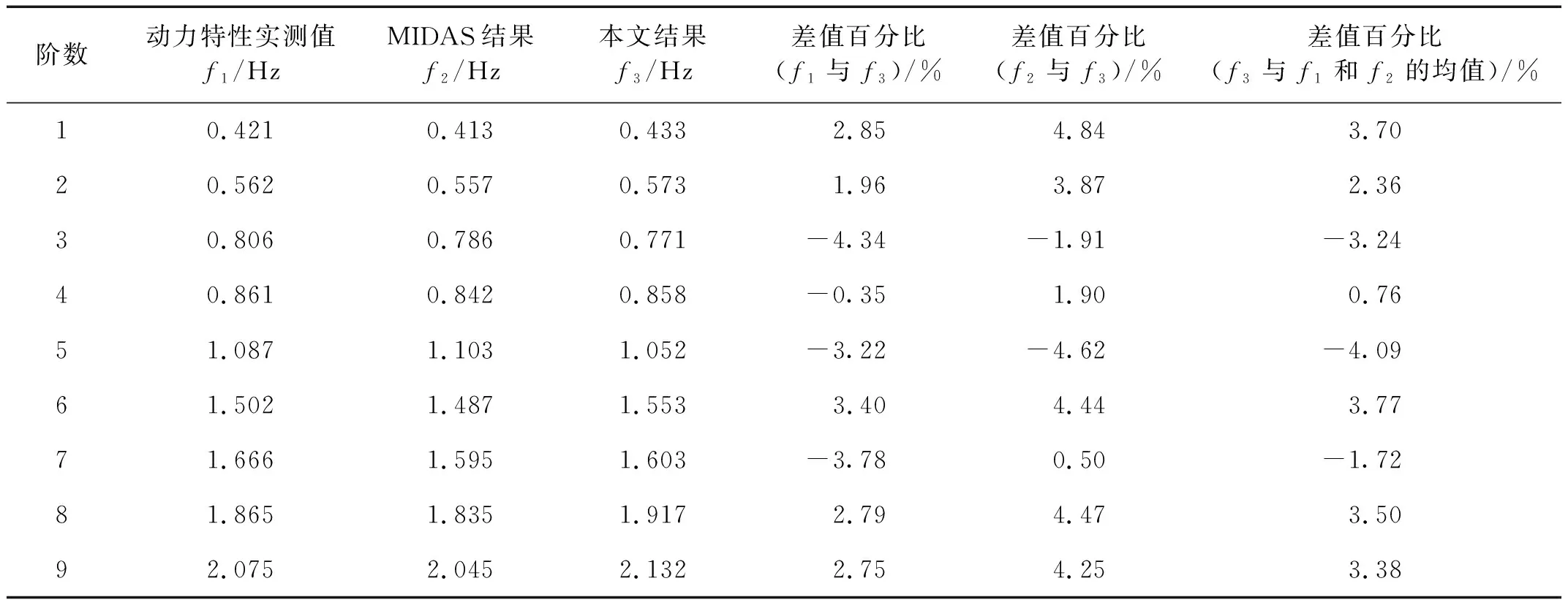
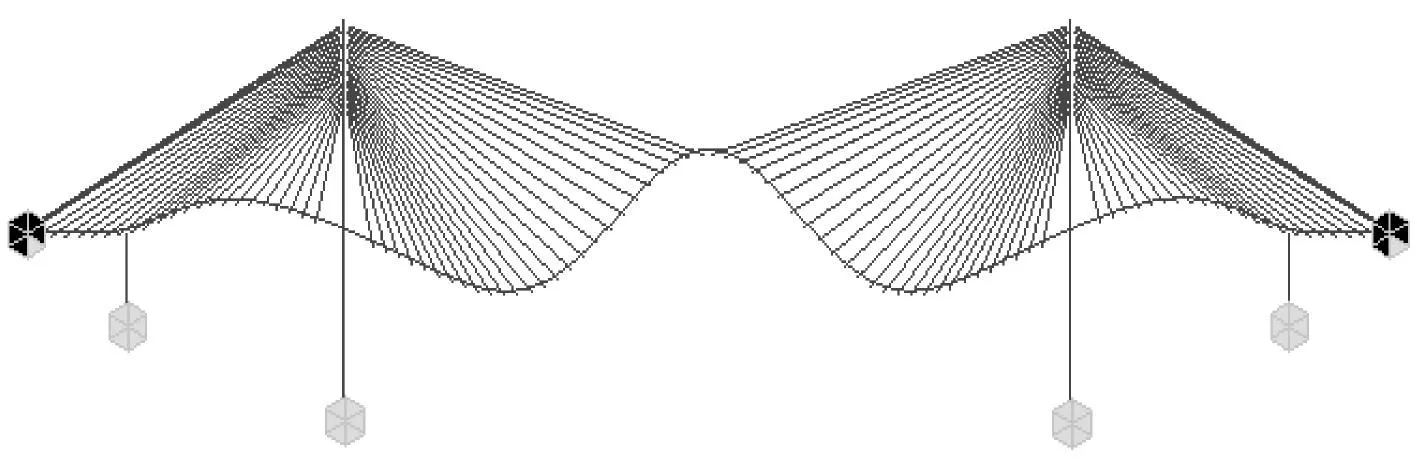
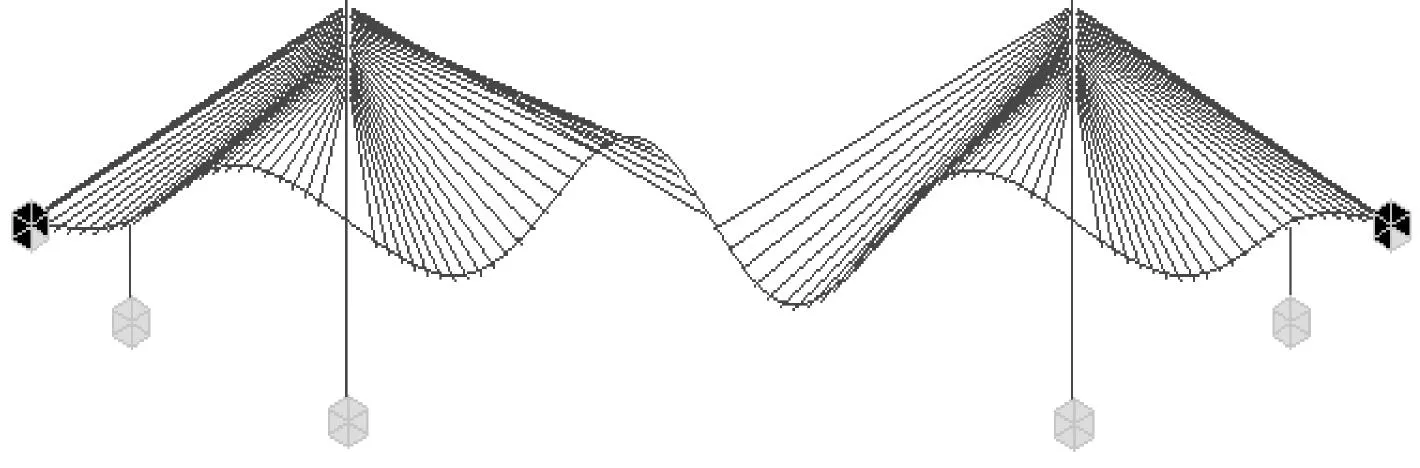
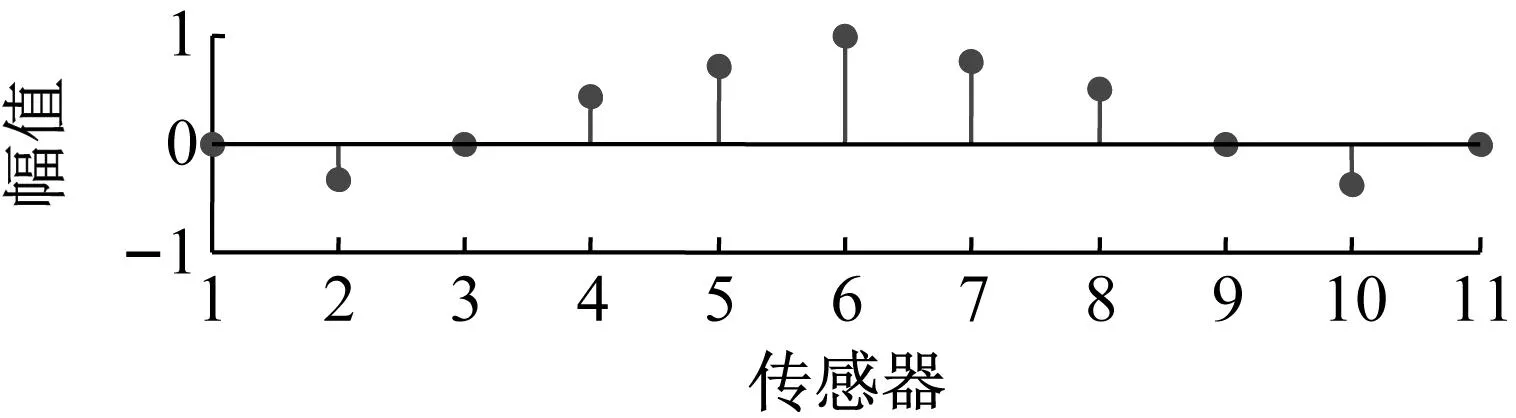
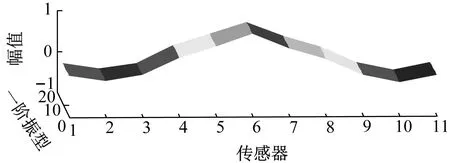
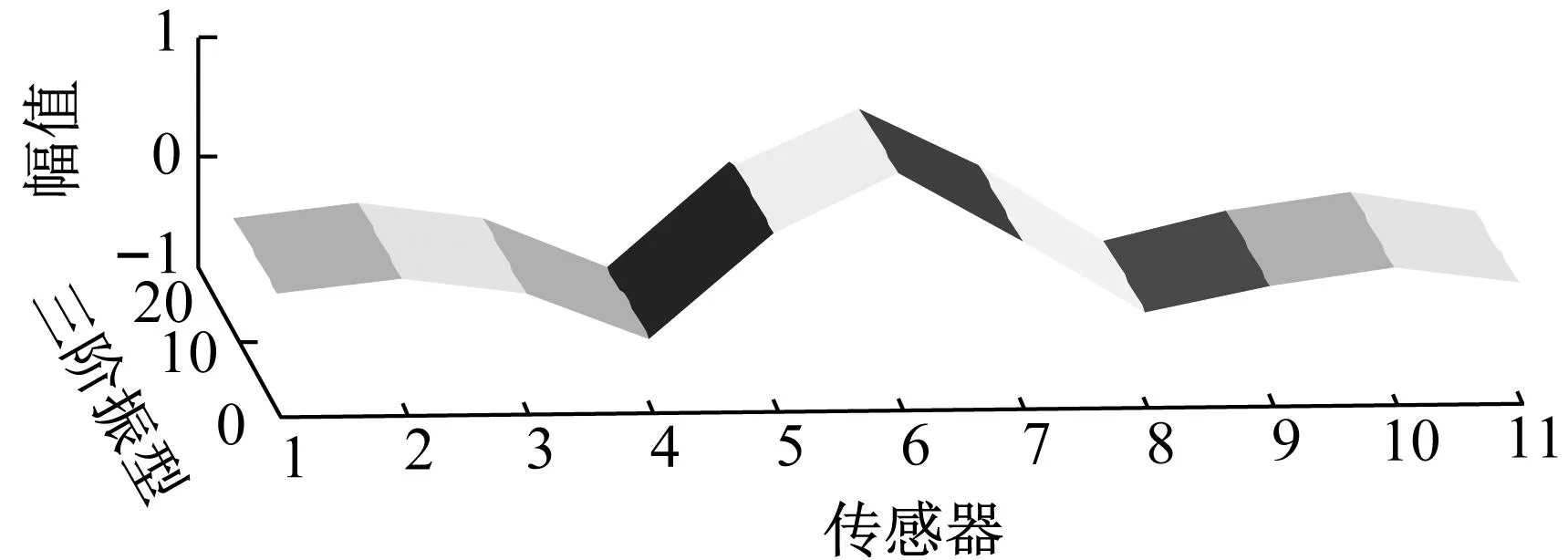
5.5 模态振型结果



6 结 论
猜你喜欢
力学与实践(2022年5期)2022-10-21 08:10:34
兰州交通大学学报(2022年2期)2022-04-26 10:19:12
特种结构(2019年2期)2019-08-19 10:05:52
电子测试(2017年15期)2017-12-18 07:19:27
湖北经济学院学报·人文社科版(2015年8期)2015-12-29 05:53:07
智能系统学报(2015年4期)2015-12-27 09:38:39
山西建筑(2015年14期)2015-06-05 09:37:07
上海电机学院学报(2015年4期)2015-02-28 14:30:00
电子设计工程(2015年6期)2015-02-27 12:04:53
计算物理(2014年2期)2014-03-11 17:01:39