种植修复数字化印模准确性影响因素的研究进展
2024-04-16 06:15王涵,胡建
口腔医学 2024年3期
王 涵,胡 建
种植修复的一个重要挑战是实现修复体与上部结构间的被动就位,被动就位是确保骨结合稳定的重要条件,是种植修复治疗长期成功的关键因素[1]。不良的被动就位可能导致机械和生物学并发症,机械问题可表现为修复体固位螺丝的松动、折断,甚至种植体的折断;生物并发症表现为种植体与其上部结构出现微渗漏,从而引起疼痛、边缘骨丢失,甚至骨整合丧失[1-2]。
准确的种植体印模是获得可靠工作模型的必要条件,而工作模型又是制作精确匹配修复体的关键[3]。随着计算机辅助设计/计算机辅助制造(computer aided design/computer aided manufacturing,CAD/CAM)技术的出现,全数字化种植修复工作流程日益完善,通过口内扫描仪(intraoral scanner,IOS)获取数字化印模成为必不可少的一环[2]。由于数字化扫描具有便捷、快速、便于储存、患者舒适度高等优点,受到临床医生和患者的欢迎[4-6]。数字化扫描的准确性包括正确度和精密度。正确度定义为实际参考对象和测试对象之间的接近程度。精密度定义为重复测量的测试对象测量值之间的接近程度[7]。虽然已证明数字化印模在单颗牙缺失的种植修复中与传统印模的准确性相当,但是,在长跨度种植修复中,数字化印模的准确性依旧不及传统印模[8]。本文从口内扫描仪、种植体、扫描体等方面对数字化印模准确性的影响进行综述。
1 口内扫描仪
口内扫描仪是一种由手持式摄像头(硬件)、计算机和软件组成,可以感知物体粗糙度并将其构建为3D数据的医疗设备[9-10]。口内扫描仪所使用的扫描原理主要包括三种类型:主动三角测量技术(active or passive stereovision and triangulation)、共聚焦激光扫描显微成像技术(confocal laser scanner microscopy)和主动波阵面采样技术(active wavefront sampling)[11]。无论采用何种类型的成像技术,都需要向被扫描物体表面投射光线来获得大量、密集的点云集合,然后经过软件处理转换成多边形数据,多边形数据是三角形面片的集合[10]。
1.1 软硬件
Haddadi等[12]比较了同一台扫描仪CEREC Omnicam(Dentsply Sirona,德国)的4.4.0和4.4.4版本,扫描相同牙齿,在预备边缘、肩台、咬合面等部位的偏差,结果表明在预备边缘和内轴角部位准确性发生了明显的改善。这似乎表明改善采集数据的方式在处理形态突然变化的位置得到了明显的改善,从而提高扫描仪的临床准确性[12]。Schmidt等[13]调查了True definition(3M,美国)、Trios(3Shape,丹麦)、CEREC(Sirona,德国)三种不同口内扫描仪系统的不同硬件和软件版本取模的准确性,这三种口内扫描仪分别使用了不同的扫描原理,结果表明口内扫描仪的扫描准确性与硬件和软件版本有决定性的关系,同时发现,在CEREC系列中Primescan IOS比Omnicam IOS准确性高。Chen等[14]将Primescan和Trios两款口内扫描仪与仓式扫描仪进行比较,结果显示Primescan IOS获得的印模准确性要优于Trios。Primescan IOS使用了主动三角测量技术与共聚焦激光扫描显微成像技术,将扫描原理组合使用似乎可以克服单一原理带来的局限性[13]。共聚焦激光扫描显微成像技术获取的图像数据清晰度高、细节表现力好,扫描准确性较高,但因采用逐层扫描模式,扫描速度相对较慢;主动三角测量技术获取图像速度快,但是会产生远中阴影现象,导致局部印模准确性降低[11,15]。不同原理的组合使用似乎是口内扫描仪硬件更新的方向。
1.2 扫描路径
为了获得缺牙区的完整扫描,口内扫描仪需要将一系列图像缝合在一起,因此制造商会有推荐的扫描路径,以允许软件快捷精确地将捕获的表面缝合在一起,从而创建完整的数字化印模[16]。Schmidt等[17]在上颌无牙颌模型前磨牙和磨牙区共植入4颗种植体,扫描从种植体14开始到26结束,结果显示,口内扫描的正确度偏差随着扫描路径的增加而增加,而精密度却没有显著影响。同样,Kim等[18]在下颌模型研究发现扫描起始位置的种植体的误差最小,误差随着距扫描起始点距离的增加而增加。Chen等[14]比较了三颗牙、半牙弓和全牙弓3个不同扫描跨度,结果显示扫描三颗牙时口内扫描仪的准确性与台式扫描仪相当甚至要更高,而在半牙弓和全牙弓的扫描中数字化印模的准确性不断降低。这都说明了随着捕获图像数量的增加,在图像重叠部分的连续拼接过程中产生的误差不断累积,这种累积误差也说明了较长扫描跨度在图像组合过程中容易产生更大误差[14,18]。Müller等[19]在同一个模型上比较了3种扫描路径(A:上颌右侧第二磨牙的远颊面开始扫描牙齿的颊面,然后从咬合-腭侧返回;B:上颌右侧第二磨牙的牙合-腭面开始,向牙弓的另一侧移动,始终包括两个表面,然后从颊侧返回;C:S型单向),B路径为制造商推荐路径,显示出最高的精密度。综上,在临床操作中应尽可能按照制造商推荐路径扫描,因为制造商对相应软件的设置可能更有利于图像的拼接。同时,在扫描过程中操作者必须保持流畅的运动,在记录过程中始终保持稳定的距离和牙齿居中尤其是在牙弓的过渡区域,以尽可能减少捕获重复图像来降低产生误差的可能[9,20]。
1.3 环境光
环境光对扫描准确性的影响主要表现在正确度方面。环境光对数字化印模的正确度的影响与获取3D数据的过程相关。大多数光学扫描仪通过将激光束投射到原始几何形状的表面上并在电荷耦合器件中捕获反射光来获得3D数据[21]。然而,如果激光束的照明度太高,则传感器将变得饱和就会阻止系统计算点云的位置。此外,高照明度激光会导致点云的局部缺陷,并延迟数据采集。白光由多种颜色的光组成,不同颜色的光照射在牙面上折射在不同焦点上,对扫描产生较大的影响[11]。Arakida等[21]设置了黄色(3 900 K)、橙色(4 100 K)、白色(7 500 K)和蓝色(19 000 K)四种色温和0、500、2 500 lux三种照明度,比较在12种照明条件下扫描的准确性。结果发现500 lux和3 900K组的正确度最高。此外,无论色温如何,2 500 lux的照明度条件下扫描时间更长,因其更容易导致传感器误差。这一发现揭示了环境光影响正确度和扫描时间。因此,建议口扫时应尽量避免辅助灯光的加入,尤其是照明度较高的手术灯光。
2 种植体
口内不同种植体的三维空间位置关系,如种植体之间的距离、相互之间长轴的交角,乃至种植体所处牙弓的位置等,均对种植体数字化印模的准确性存在一定的影响。
2.1 距离
以往多项体外研究表明,对于单个种植体和三单位种植固定修复,其数字化印模的准确性与传统印模相当[8,22-23],然而,随着种植体间距离的增加数字化印模的准确性不断减小,这可能是因为种植体之间的黏膜光滑、无标志点导致图像拼接出现错误[18-21]。Braian等[24]研究表明无牙颌种植修复口内扫描仪扫描的印模的正确度<193 μm,而对于长度为16~22 mm的较短牙弓数据采集是准确的。Tan等[25]在两个分别植入6颗(间距为20 mm)和8颗(间距为13 mm)种植体的上颌无牙颌模型上进行研究,结果显示,种植体间距离小的模型中三维偏差能够减小110~150 μm。Thanasrisuebwong等[26]制作了3个种植体间距7、14、21 mm的上颌模型进行扫描,结果显示正确度和精密度误差随着种植体间距的增大而增大,尤其在21 mm组中显示出较为显著的偏差。以上研究均表明种植体间的距离对数字化印模的准确性产生影响。Albayrak等[27]在下颌模型的37、35、33、41、43、44、47位置各植入一枚种植体,比较数字化印模和传统印模的准确性,结果显示,在D4-5和D7-8种植体距离较大的组内传统印模显示出较小的偏差,而在距离更近的种植体间传统印模的偏差最大,数字化印模显示出较好的准确性。一般认为,距离小于两个牙宽度的种植体间距时,其误差在可接受范围之内,大于这一距离则需要考虑采用辅助口扫措施[15,23]。
2.2 角度
多项体外研究表明种植体间的角度不超过15°时,不会影响数字化印模准确性。Abduo等[28]和Papaspyridakos等[29]在模型上植入了不同角度的种植体,结果显示,种植体间角度小于15°的情况下不会影响数字化印模的准确性。但是,当种植体间角度大于15°时,随着角度的增加数字化印模的准确性下降[20,30]。Chia等[30]在模型上设置了0°、10°、20°三种角度,结果显示,数字化印模的平均误差为18~33 μm,且随着种植体间角度的增加而增加,种植体间角度对数字化印模的总体线性误差有显著影响。然而,Sallorenzo等[31]比较了植入成角种植体和平行种植体的两个上颌模型,结果显示植入平行种植体模型的总体误差为20 μm(P=0.031)和0.354°(P=0.087),成角种植体模型的总体误差为10 μm(P=0.055)和0.084°(P=0.045),这似乎表明成角有利于数字化印模的准确度。对于上述不同结果得到结论,种植体成角对口扫准确性的影响还需要进一步研究。
2.3 位置
当使用口内扫描仪来捕获种植体时,牙弓的形状也会对数字化印模准确性产生一定的影响[9]。Pozzi等[32]研究发现,数字化印模中后部种植体显示出更大的偏差,而且牙弓的曲率半径变小。同样,多项研究都发现测量出的线性偏差为负值,表明数字化印模“缩小”[6,23]。有学者认为牙弓曲率半径减小是口内扫描仪所固有的,而且下颌黏膜上缺乏标志点导致这一现象尤为明显[32]。在上颌中,腭皱襞的存在有利于图像的拼接,从而对牙弓曲率半径的影响并不显著。随着扫描的进行,累计误差不断增多,在进行图像拼接时会更多地切除相似图像,导致最后的数字化印模牙弓曲率减小并且扫描终点处的误差较大。正如Tan等[25]研究显示,以扫描起始处种植体作为原点进行比较,发现在前牙区和对侧牙弓处观察到最大角度偏差。Arcuri等[20]发现在植入6颗种植体的上颌无牙颌模型中,获取的数字化印模在前牙区呈现出较大的偏差。这可能是因为前牙区处于牙弓的转折处,会使得口内扫描仪尖端经过弯曲的路径,从而容易获得重复的图像,图像之间可能无法正确拼接在一起,导致图像拼接时出现不准确和有噪声的网格以及累计误差;或者后处理算法可能会切掉扫描的关键部分,从而错误地将其识别为冗余点进而影响数字化印模的准确性[33]。同样,Ender等[34]的体外上颌部分牙弓模型的研究显示牙弓后段印模的准确性显示出在临床可接受的偏差范围内,且显著高于前半段牙弓。综上所述,前牙区和扫描终点区域更有可能出现较大的误差。
3 扫描体
在数字化扫描过程中需要使用扫描杆进行定位,使得在数字化模型上转移种植体的位置。扫描杆的形状、材料等因素也会对数字化印模的准确性产生一定影响。
3.1 形状
扫描杆(implant scan body,ISB)通常是由三部分组成,包括顶部、体部和基部,顶部又称为扫描区域[33],是用于软件配准种植体植入方向和角度的主要部位,通常会设计非对称形状使其有助于扫描ISB并改善CAD软件的表面识别能力[33]。Motel等[35]对ELOS A/S(丹麦)、NT-Trading GmbH(德国)和TeamZiereis(德国)三种不同形状的扫描体在体外模型上进行扫描并对其进行误差分析(图1)。结果显示ELOS A/S的平均三维偏差为41 μm,与传统技术相当,而其他两组均表现出较低的准确度。ELOS A/S是其中形状最简单的,使其更加容易被扫描、识别和匹配。同样,Mizumoto等[36]在体外模型上比较了五种不同形状的扫描杆,发现ZI(Zimmer Biomet Dental,美国)(平均171 μm)与工作模型的线性偏差显著小于AF(IO-Flo,Dentsply Sirona,德国)(平均209 μm)。同时,最高的扫描杆之一的AF扫描杆,形状也较为复杂,其显示出了最大的角度偏差(图2)。ZI扫描杆为其中最短、结构也最为简单,而且也能最快被扫描完成。更短更简单的扫描杆准确性更高,可能是由于扫描杆在安装到种植体上时位置可能出现微小的偏差,而这种偏差随着扫描杆高度的增加被放大,所以较短的扫描杆显示出较高的准确性。另外,更简单的结构使得扫描杆上锐边、锐角等结构减少,有利于扫描和图像拼接。综上所述,形状短且简单的扫描杆可能更加有利于临床应用。但是目前对扫描杆形状的研究较少,后续尚需要更多的研究来证明。为了提高长跨度种植修复数字化印模的准确度,学者们提出了带有延伸结构的扫描杆[6,37-38]。研究结果表明改良的扫描杆可以提高数字化印模的准确性,但是由于延伸结构的存在会阻挡下方黏膜的图像获取,其应用效果有待进一步验证。Ramsey等[39]介绍了一种可以直接扫描的愈合基台,即BellaTek Encode愈合基台,它在传统的愈合基台轴面组合了非对称的种植扫描识别面,并取得了良好的效果。扫描杆和愈合基台一体化不仅降低了治疗费用,还节省了大量时间,这可能也是未来扫描杆的发展方向。
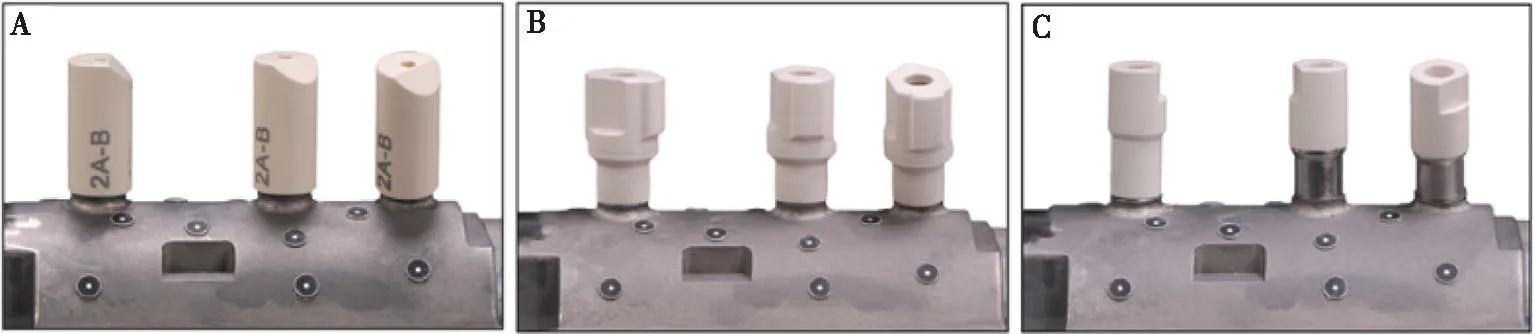
A:ELOS A/S;B:Nt-Trading;C:TeamZiereis。

A:Atlantis Io-Flo(AF);B:Core3D(C3D);C:Nt-Trading(NT);D:Dess-USA(DE);E:Zimmer Biomet(ZI)。
3.2 材料
不同品牌ISB的组成材料也并不相同,常用的材料有钛合金、聚醚醚酮、树脂等[40]。通常,ISB是由一种或两种材料组成。Arcuri等[20]比较了钛合金(T)、聚醚醚酮(Pk)和钛-聚醚醚酮(Pkt)三种不同材料的扫描体。结果显示,聚醚醚酮ISB的扫描准确性最高,其次是钛合金ISB。ISB材料的光学性能会影响口内扫描仪获取点云的数量,从而影响最终印模的准确性。由于物体表面存在次表面散射现象,光滑的材料更容易存在反射表面,增加扫描的挑战性[40]。纯钛的ISB在扫描时表面反光,虽然进行喷砂处理但是相较于聚醚醚酮材料仍然效果不佳。Pkt表现出最差的扫描准确性,这是由于在制作过程中,聚醚醚酮和金属连接处可能会出现微小的不匹配现象。Tan等[25]的研究也显示由两组分制成的Core3D扫描杆产生的误差要远高于Amann Girrbach和Sirona扫描杆。
3.3 扭矩
有研究显示扭矩大小会影响ISB的高度以及引起ISB变形,进而导致ISB位置发生变化,最终影响数字化印模的准确性[23,33]。Tan等[25]体外模型上扫描了五种扫描杆,每个扫描杆均以5、10和15 N·cm的递增扭矩大小固定。结果显示,ISB高度的偏差范围在-12~15 μm,且ISB的高度随着扭矩的增加而降低。因此,对不同扭矩引起的扫描误差也要进行考虑。
4 其 他
种植体深度、操作者经验及患者本身的因素都会对扫描的准确性产生影响。目前对于种植体深度这一因素仍存在争议。Giménez等[41]在6个种植体的上颌模型中,将12位置的种植体植入龈下4 mm,其他在平龈的位置,结果表明种植体的植入深度对数字化印模的准确性没有影响。然而,Sequeira等[42]设置了4组不同植入深度的种植体模型,分别位于龈下7 mm、6 mm、3 mm和平龈的位置,结果表明随着植入深度的增加数字化印模的准确性降低。目前尚需要更多的证据来证明其影响。Arcuri等[20]对三位操作者获得的数字化印模进行比较,结果显示,操作者对数字化印模准确性无显著影响。但是,对口内扫描仪多加练习,掌握正确的扫描方法,可能会提高印模的质量和扫描速度。另外,由于患者口内存在唾液、龈沟液、血液等会导致图像采集出现误差;同时,由于难以控制患者运动,舌及下颌等周围软组织容易出现图像的拼接错误,都会对数字化印模的准确性产生影响[7,9]。
5 小 结
数字化印模准确性的影响因素包括多个方面,但是,种植体距离对数字化印模的影响被认为是最主要的,也是提高数字化印模准确性的主要突破口。很多学者研究应用不同的技术来克服这一困难,包括黏膜表面修饰技术[7,43]、改良ISB[6,38]及ISB夹板固定技术[32]。这些研究均表明对数字化印模的准确性起到了积极作用,但是尚未达到临床应用的准确性要求。并且,大部分为体外研究,与体内环境相差较大,其结果仍有待商榷。目前,数字化印模技术正在逐步取代传统印模技术,成为种植修复主要的数字化信息采集手段。
猜你喜欢
华西口腔医学杂志(2023年5期)2023-10-13
口腔颌面修复学杂志(2021年4期)2021-12-23
中国医药指南(2019年12期)2019-05-27
中华老年口腔医学杂志(2018年4期)2018-01-13
实用口腔医学杂志(2017年6期)2017-09-19
——基于牙弓形态发育不良的儿童错牙合畸形诊断与阻断治疗
华西口腔医学杂志(2016年6期)2016-12-21
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
中国卫生标准管理(2015年16期)2015-01-26
现代营销·经营版(2013年5期)2013-05-14