柔性浅埋物的声-振智能探测
2024-04-08 07:29盛才良
光学精密工程 2024年5期
王 驰,曹 鹏,黄 庆,王 超,盛才良
(1.上海大学 精密机械工程系,上海 200444;2.中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471023;3.江苏永康机械有限公司,江苏 无锡 214203)
1 引言
柔性浅埋物是指声顺性相对于土壤、岩石等刚性物体较大、掩埋于1 米以内的浅层地下目标[1]。随着对地下空间探索的不断深入,关于浅层地下目标探测技术的研究价值也愈发凸显。浅层地下目标包括管道管线、空洞、地下考古、地雷、未爆弹和地下军事设施等。根据探测原理和手段的不同,常见的地下目标快速探测技术有电磁探测[2]、光学成像探测[3]、原子核物理探测[4]和生物探测[5]等。这些探测技术各有特点,其中电磁探测技术依据电磁波特性,适用于金属掩埋物,但对于非金属或者金属含量极低的掩埋物却无能为力。此外,利用传感器捕获的信号通常为原始信号,如何快速识别信号中蕴含的浅埋物信息,是当前地下目标探测面临的难题。
近年来,基于声-地震耦合技术的柔性浅埋物探测方法取得一定的研究进展[6-7]。在声波激励下,一部分能量通过动量作用及其空气与土壤粒子的黏滞摩擦作用,以地震波的形式耦合到土壤中。从土壤与柔性浅埋物的特性阻抗差来分析,浅埋物因空腔结构特点,大部分慢纵波传到浅埋物表面会发生强烈的反射和散射,引起浅埋物上方地表土壤发生有别于周围土壤的振动。激光剪切散斑干涉技术能够对不同埋设条件下柔性物体的振动形态清晰成像[8],获得信息丰富的干涉条纹图,为基于目标检测算法的柔性浅埋物的声-振智能探测奠定基础。
目标检测算法大致分为两类,一类是以RCNN 系列为代表的基于候选区域的Two-stage算法[9-10],另一类是以YOLO 系列为代表的按回归问题解决的One-stage 算法[11]。目标检测算法从诞生之日起就备受瞩目,随着计算机算力的日益强大,将算法部署于实际应用的优越性已经在各行各业中得到体现。因此,为多种柔性浅埋物建立丰富的干涉条纹图数据库,利用目标检测算法对干涉条纹图进行快速识别,对于柔性浅埋物的大面积快速检测具有重要意义。考虑柔性浅埋物智能化探测的实际需要,本文选用应用广泛、检测快速的YOLO 系列算法,用于激光散斑干涉条纹图的智能识别。利用基于目标检测算法的声-光融合智能探测系统,对给定实验环境下多种柔性浅埋物进行激光散斑干涉条纹图智能识别研究,分析多种柔性浅埋物的激光散斑干涉条纹图的变化规律,构建柔性浅埋物智能探测网络模型,为柔性浅埋物的声-振智能探测方法的研究提供一定的理论和技术基础。
2 柔性浅埋物智能探测
2.1 剪切散斑干涉成像
图1 为激光剪切散斑干涉仪成像原理。当激光照射到被测物体后发生漫反射,反射光进入剪切元件中的分束镜后进行分束,一束光进入平面镜1,另一束光进入平面镜2,两束光经反射后再次进入分束镜并最终进入CCD 相机。其中,经平面镜1 反射的像为原像,经平面镜2 反射的像为剪切像,二者因平面镜2 的倾斜产生错位,并在成像平面上相互干涉,形成干涉条纹图。干涉条纹图即是相位分布图,代表相位等值线,包含光的相位信息。相邻两条纹之间有相同的相位差,而相位差又是光程差的反映,光程差中记录了振动物体的位移信息。
2.2 YOLOv5 智能探测网络模型
YOLO 系列目标检测算法结构简洁,在工业[12]、医疗[13]和农业[14]等诸多行业具有非常广泛的应用前景。YOLOv5 综合了YOLOv3-SPP 和YOLOv4 的特性,适用于实时检测。在综合考虑模型的大小和精度后,选取YOLOv5s 模型构建柔性浅埋物智能探测网络模型。如图2 所示,YOLOv5s 网络结构主要由输入端、主干网络、颈部及输出端4 个部分组成[15]。
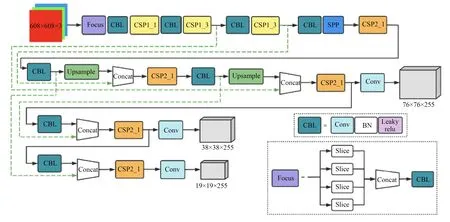
图2 YOLOv5s 网络结构Fig.2 Network structure of YOLOv5s
输入端由Mosaic 数据增强、自适应锚框计算和自适应图片缩放三部分组成。Mosaic 数据增强方法的核心原理是将原始图像经过随机裁剪、随机缩放和随机排列的方式拼接成一张新的图像,再将新图像输入网络进行训练。自适应锚框计算将初始锚框的计算功能嵌入到模型训练过程中,使模型能自动计算不同数据集的最佳锚框。自适应图片缩放能够在图像缩放时填充最少的像素,从而保留更多的原始图像信息,有利于提高推理速度。
主干网络包含Focus 结构和CSP(Cross Stage Partial)结构。Focus 结构是YOLOv5 算法在之前版本基础上的重要升级,其关键环节是切片操作,如图3 所示。在YOLOv5s 网络结构中,输入端输入原始尺寸为608×608×3 的图像,经过Focus 结构进行切片操作后,原始图像首先变成304×304×32 的特征图,生成的特征图经过一次卷积运算(卷积核数量为32 个)后最终变成304×304×32 的特征图。图4 为CSP 结构示意图,将输入的特征图拆分为两部分,其中一部分使用卷积计算方法,另一部分使用带有残差结构的方式进行计算,最后将这两部分合并得到新的特征图[16]。
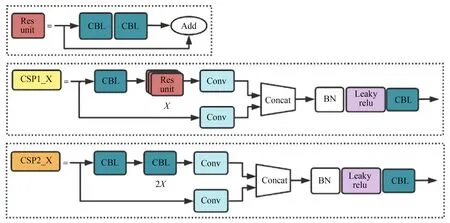
图4 CSP 结构示意图Fig.4 Structure diagram of CSP
颈部采用FPN(Feature Pyramid Network)结构和PAN(Path Aggregation Network)结构相结合的方式。FPN 利用上采样的方式对信息进行传递融合,获得预测的特征图,是自顶而下的结构;PAN 是自底向上传递目标的位置信息。通过自顶向下和自底向上的特征信息融合有利于模型更好地学习特征,增强模型对目标的敏感度。
输出端采用Bounding box 损失函数和非极大值抑制(Non-Maximum Suppression,NMS)。非极大值抑制主要应用于目标检测的后处理阶段,可以利用NMS 非极大抑制方法从多个检测框中通过排序并比较设定阈值的方式筛选出最高得分即最佳结果,与此同时删除重复的检测框。
2.3 数据集的构建和处理
建立柔性浅埋物数据集,采集不同种类、不同埋设深度的干涉条纹图共900 张,为获取性能良好的柔性浅埋物智能探测网络模型提供基础。VOC2007 数据集中对应目标检测的文件夹有3个:(1)JPEGImages 文件夹:包含所有原始图像,如训练图片和测试图片;(2)Annotations 文件夹:存放.xml 格式的文件,每个.xml 文件对应JPEGImages 文件夹中的一张照片,包含图像尺寸、检测目标的类别、像素坐标等信息;(3)ImageSets 文件夹,其中的主文件全部为.txt 文件,对应训练、验证和测试图片的名称作为索引[17]。
用labelImg 程序在原始图像上对干涉条纹图进行标记,将原图和生成的.xml 文件分别存入PASCAL VOC2007 对应的文件夹,将.xml 文件修改为YOLO 算法采用的.txt 格式,按照训练、验证、测试比例为8∶1∶1 随机生成图像索引文件。准备工作结束后,将上述数据集导入YOLOv5 算法模型进行训练。
2.4 性能评估
目标检测通用评价标准主要有精确率(P)、召回率(R)和平均精确率(PA)等[18-19]。精确率是指在一组预测结果中,被正确预测为教练雷雷壳的样本数与所有被预测为教练雷雷壳的样本数之比;召回率是指在一组预测结果中,被正确预测为教练雷雷壳的样本数与实际上教练雷雷壳的样本数之比;平均精确率是指对于每个目标,算法检测出的所有目标的平均精度。
3 个评价指标分别表示为:
式中:TP 表示正确检测目标数,FP 表示错误检测目标数,FN 表示漏检目标数;PA表示R在[0,1]内P的平均值,PmA表示所有类别PA的平均值,是P和R的统筹考虑。
3 声-光融合智能探测实验系统
3.1 实验系统搭建
柔性浅埋物声-光融合智能探测实验系统如图5 所示,该系统主要由声发射单元和地表振动信号检测单元组成。声发生单元由Tektronix(泰克科技)公司生产的AFG3022C 型信号发生器、东莞东雅音响有限公司生产的PA(Power Amplifier)系列功率放大器和惠威(HIVI)公司生产的HQ3 大功率低音炮组成。地表振动信号检测单元包括激光散斑干涉无损检测系统SE Systems 和移动图形工作站两部分。SE Systems 的采集头用来采集柔性物体的振动信号,移动图形工作站进行数据处理,利用贝塞尔函数调制形成干涉条纹图像视频。将柔性浅埋物智能检测模型也部署在移动图形工作站中,采集、训练和测试结果在工作站中进行展示。
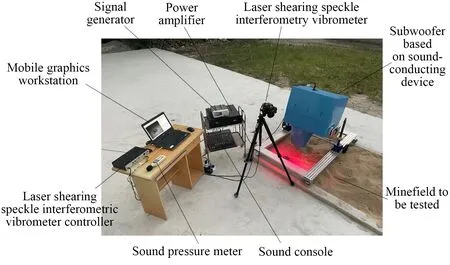
图5 柔性浅埋物声-光融合智能探测实验系统Fig.5 Sound-light fusion intelligent detection system of flexible shallow buried object
实验选取3 种弹性腔体模型的教练雷雷壳作为柔性浅埋物样品,3 种教练雷雷壳具有不同的材质和结构,分别是69 式防坦克塑料教练雷雷壳、72 式防坦克金属教练雷雷壳和58 式防工兵橡胶教练雷雷壳,砖块作为对照物掩埋于教练雷雷壳附近。柔性浅埋物相关特性参数如表1所示。
表1 典型柔性浅埋物相关特征参数Tab.1 Characteristic parameters of typical flexible shields
3.2 实验方案设计
实验所用土壤类型选择细沙。剪切量设置为最大允许缺陷尺寸的50%~100%,通常在5~15 mm 之间。埋深设置为10,30,50 mm。声压级设置为120 dB。3 种教练雷雷壳不同埋设深度的实验环境和实验参数设置如表2 所示,按照表中实验参数采集干涉条纹图,作为智能识别算法的数据集。

表2 教练雷雷壳不同埋深时实验环境和实验参数Tab.2 Experimental environment and parameters for different buried depths of coach shell
图6 表示埋设深度为10 mm 时,3 种教练雷壳及砖块的干涉条纹图。3 种教练雷雷壳的表面均呈现对称分布的蝴蝶斑图案,有明暗相间的条纹,不同的雷壳,条纹阶数也不同,但掩埋物为砖块时则无明显条纹。表明该系统对空腔结构体的柔性物体检测敏感,而对实体如砖块检测不敏感。因此,为了验证YOLOv5 算法用于干涉条纹图识别的可行性,这里设计两个实验:一是捕获干涉条纹图检测教练雷雷壳的实验;二是根据不同埋设深度干涉条纹图的变化规律判断教练雷雷壳类别的检测实验。
3.3 实验平台配置
YOLOv5 网络模型的训练基于Linux 系统。表3 为移动图形工作站的软硬件配置参数,表4为YOLOv5 算法训练参数设置。
表3 Linux 系统软硬件配置Tab.3 Linux software and hardware configuration
表4 训练参数设置Tab.4 Training parameters setting
4 实验结果及分析
4.1 柔性浅埋物检测
训练结束后,加载训练完成后的最佳权重,将数据集中的测试集和采集头捕获的视频数据输入神经网络进行测试,以验证本算法的实际检测效果。3 种教练雷雷壳干涉条纹图的部分检测效果如图7 所示。
图7 教练雷雷壳检测效果Fig.7 Detection effect to judge thunder shell
从实验结果来看,教练雷雷壳干涉条纹图的检测效果比较明显,由于输入数据为视频数据,可以通过调节采集头的采集帧率来实现高密度获取实时图像的任务,因此将YOLOv5 应用于检测干涉条纹图可以提高检测速度。评价指标如图8 所示,精确率可达98.39%,召回率为84.72%,平均精度为99.66%。
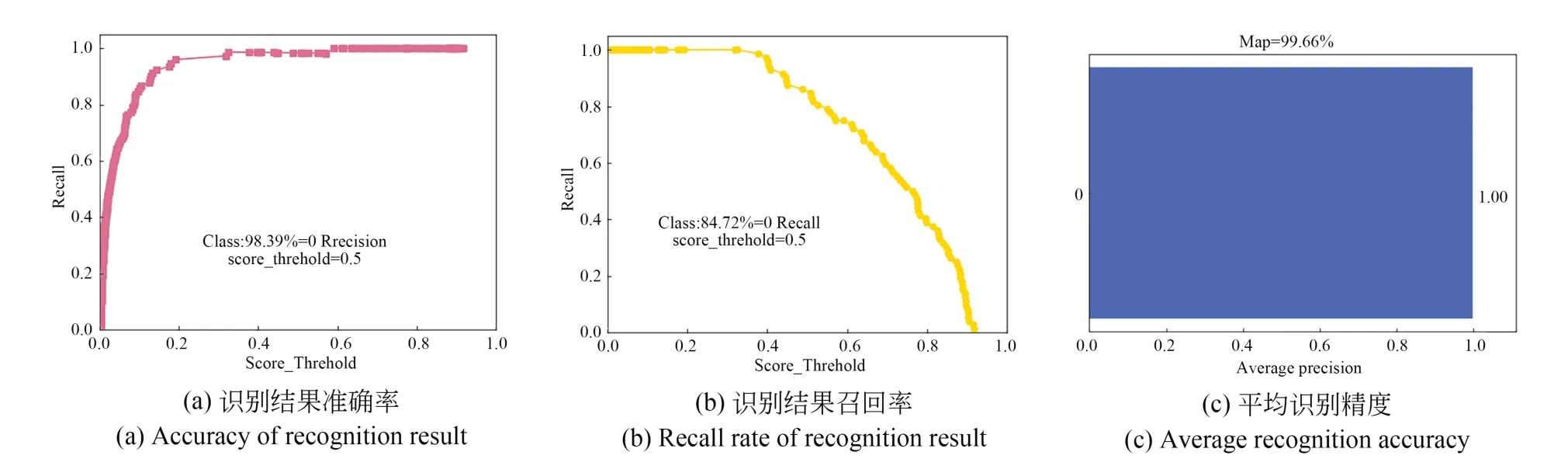
图8 评价指标Fig.8 Evaluation index
4.2 柔性浅埋物类别检测
上述实验结果表明,利用YOLOv5 算法能快速从激光散斑干涉无损检测系统的采集头所采集的视频中检测出不同教练雷雷壳在不同掩埋深度下的干涉条纹图。考虑到柔性浅埋物种类的多样性,因此有必要对其进行分类识别。
细沙环境下3 种教练雷雷壳的类别检测部分效果如图9 所示。如图10 所示,F1 曲线表示F1分数与置信度阈值之间的关系。F1 分数是分类的一个衡量标准,是精确率和召回率的调和平均数。由图9 和图10 可知,细沙环境金属教练雷雷壳的检测效果欠佳,原因可能在于采集的干涉条纹图大多集中在视频中央,现有采集头所获取的图像大多布满整个画面,使得在最初打标签环节数据类型过于单一。尽管YOLOv5 自带的数据增强起到一定的作用,但对于采集头的视场范围仍然提出了较高的要求,打标签环节数据特征的单一性致使测试过程中出现了该问题。
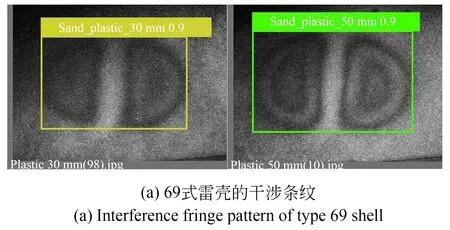
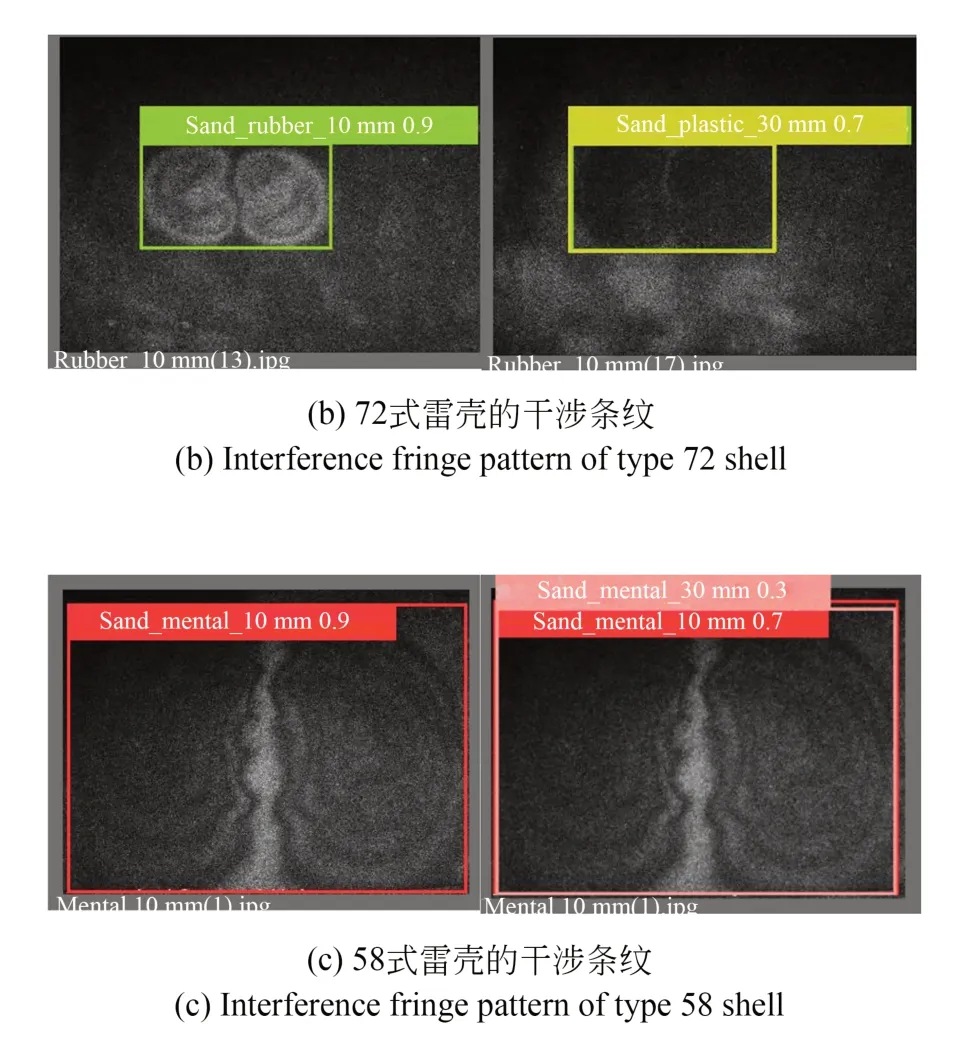
图9 教练雷雷壳类别检测效果Fig.9 Detection effect for type determination of thunder
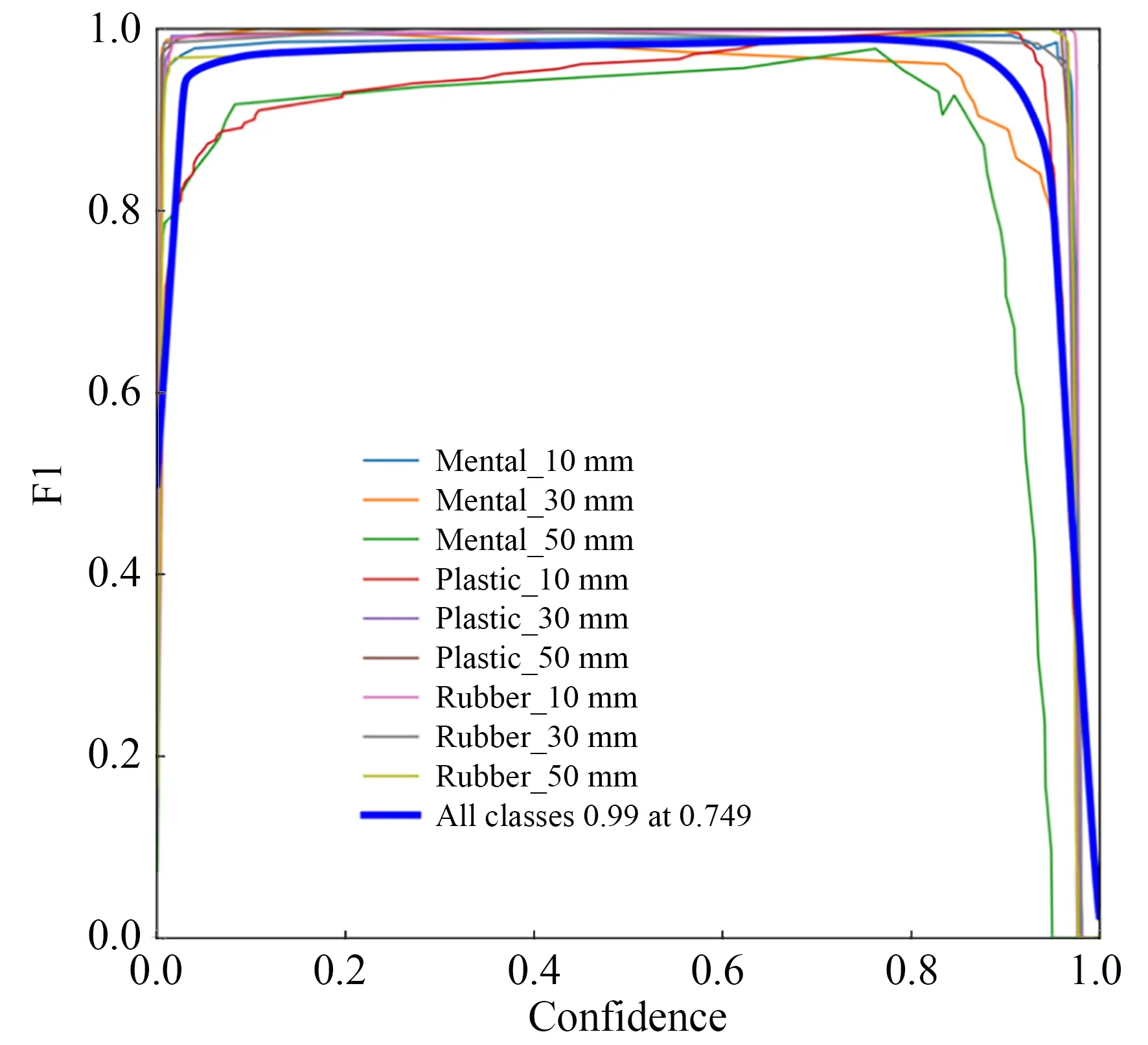
图10 柔性浅埋物类别检测的F1 曲线Fig.10 F1 curve of flexible shallow buried objects category detection
5 结论
针对当前柔性浅埋物探测技术中广泛存在的探测效率低下问题,本文提出一种基于声-地震耦合技术的智能探测方法。搭建声-光融合智能探测系统,构建柔性浅埋物干涉条纹图数据集,利用YOLOv5 算法开展柔性浅埋物和柔性浅埋物类别的检测实验。在给定条件下,经训练后智能探测网络模型的精确率为98.39%,召回率为84.72%,平均识别精度为99.66%。实验结果表明,YOLOV5 算法可用于激光散斑测振干涉条纹图的智能识别,初步验证了基于声-地震耦合技术的智能探测方法的可行性。
猜你喜欢
阅读(快乐英语高年级)(2022年10期)2022-11-08
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
小福尔摩斯(2019年2期)2019-09-10
知识就是力量(2019年8期)2019-08-08
小学生优秀作文(低年级)(2019年6期)2019-07-01
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
前卫文学(2016年3期)2016-07-01