
变转速变排量双动力源泵阀协同电液系统特性分析*
2024-03-26 02:31李琦,杨敬,权龙
机电工程 2024年3期
李 琦,杨 敬,权 龙
(太原理工大学 机械与运载工程学院,山西 太原 030024)
0 引 言
目前,起重机的液压系统一般采用传统抗流量饱和负载敏感系统。然而,传统的抗流量饱和负载敏感系统存在一些问题,比如响应速度慢、稳定性差、能耗大等[1]。液压控制系统中节流控制的精度高,系统响应较快,但容易出现节流损失和溢流损失,导致系统能耗较大。容积控制不产生节流损失,系统更高效,但是控制精度较低。如果根据阀控系统和泵控系统各自的技术优势进行泵阀协同控制液压回路,会达到良好的控制效果和节能效果[2]。随着传感器和控制器功能的开发,使电控和阀口参数的检测监控功能取代原来的硬件压力补偿功能也得以实现[3]。
已有学者对电液流量控制系统做出了研究。孔晓武等人[4-5]对负载敏感系统的动态特性进行了研究,分析了反馈管路的参数对负载敏感系统动态特性的影响。刘华等人[6]采用在压力闭环上的前馈反馈控制方法,协调了泵转速和进出口阀口开度,提出了基于泵阀协调的电液位置伺服节能控制系统,发现泵阀协调的电液位置伺服节能控制系统能提高系统能效和压力控制精度;但该系统使用进出口独立控制,结构较为复杂。刘伟等人[7-8]用压力传感器代替管路的压力反馈,提出了电子压力补偿流量匹配液压系统,该方法提高了系统响应速度;但该方法没有对阀进行控制,不能保证流量的控制精度。都佳等人[9]使用泵阀协同的方法,同时对电液比例泵和比例阀进行了控制,实现了流量精准控制目的,并降低了能耗;但该方法只应用于位置开环系统中,并没有针对闭环系统进行分析。韩京清等人[10]在闭环系统中采用PID控制方法,对闭环系统进行了理论与仿真分析,发现在不同场合,需要用不同的PID值进行控制,而且误差积分的反馈对常值扰动有效果;但在面对无扰动时和随时变化的扰动时,其误差积分的反馈会使系统动态特性变差,需要采用自抗扰控制的方法。
除了采用定转速电机和变量泵的电液动力源获得可变流量外,在国内外也有大量学者研究变转速电机和变量泵的电液动力源。IMAMURA T等人[11]研究了伺服电机驱动定量泵与传统定转速异步电机驱动变量泵等不同动力源对注塑机的液压系统的作用。张红娟等人[12-13]对不同动力源组合驱动注塑机系统能耗的影响进行了研究,实验证明了伺服电机与定量泵的组合形式可以最大限度地降低系统能耗。葛磊等人[14]设计了一种电机分段转速和液压泵连续排量控制的流量控制系统,实现了基于动态和能效优化的电液动力源流量控制目的。
基于起重机阀控系统响应快但能耗大,泵控系统效率高但控制精度低的问题,笔者建立一种变转速变排量双动力源泵阀协同的多执行元件电液系统(新系统);然后,利用AMESim和MATLAB仿真软件建立变转速变排量双动力源泵阀协同电液系统联合仿真模型,对起重机变转速变排量系统的不同工况下系统的动态响应、流量控制精度和系统能耗进行仿真研究。
1 起重机泵阀协同液压系统
1.1 系统原理
起重机变转速变排量双动力源泵阀协同液压系统由变频电机、电液比例泵、平衡阀、比例多路阀、液压缸、液压马达等组成。
与已有的定转速变排量泵阀协同液压系统(旧系统)相比,变转速变排量双动力源泵阀协同电液系统采用电子补偿法,用电液比例泵取代传统的负载敏感泵,采用合流阀将双联泵分开,单独泵源驱动每个执行元件。
为了检测比例多路阀主节流口的压差,可以在其前后各安装压力传感器。这样,控制器可以实时监测和控制比例多路阀的开度。同时,各联执行器的压力通过压力传感器传送给控制器,控制器会进行计算,从而实时控制电液比例泵的摆角和变频电机的转速,以达到控制电液比例泵输出流量的目标。
变转速变排量双动力源泵阀协同电液系统分为三种工作模式,分别是单动作微动、单动作快速运动和复合快速运动模式。
在单动作微动模式下,由于定转速变排量系统小流量时,液压泵摆角很小,系统动态响应比较慢。因此,需要进行流量分段控制,即小流量时,采用双变量模式控制系统;大流量时,仍然采用定转速变排量系统。其中一个动力源卸荷,单泵驱动单执行元件,压力传感器采集电液比例多路阀两侧的压力信号,并传递给控制器,通过摆角控制器和转速控制器给出电液比例泵控制泵摆角和电机转速值,同时控制器计算出所需电液比例多路阀的阀芯位移,以确保电液比例阀的进出口保持2 MPa的压差。
在单动作快速运动模式下,双动力源合流驱动单执行元件。为了减少系统的节流损失,控制器控制电液比例多路阀的阀口全开,通过摆角控制器和转速控制器控制电液动力源参数,以此来补偿因负载变化引起的泵泄漏量。因为负载变化很大,已有的定转速变排量泵阀协同液压系统单纯用手柄来控制流量,所以流量变化比较大。变转速变排量双动力源电液系统在做泄漏补偿后,整个系统流量曲线变化会有显著减小。
在复合快速运动模式下,双动力源分流驱动双执行元件,主阀阀口全开,系统处于流量控制模式,其属于泵控系统,节流损失很小,各联的阀口压差很小,能量损失也很小。已有的定转速变排量泵阀协同液压系统双泵合流,通过控制阀口开度实现系统流量比例分流目的,其属于阀控系统,节流损失较大,并且泵出口压力与最大负载压力有关。
负载压力较小的那一联阀口压差很大,压损也很大,能量损失就很大。因此,负载在相同变化的前提下,新系统比旧系统泵的输出压力减小了,能耗也明显降低了。
起重机变转速变排量双动力源泵阀协同电液系统原理如图1所示。

图1 变转速变排量双动力源双执行元件泵阀协同液压系统原理图
起重机定转速变排量泵阀协同电液系统原理如图2所示。
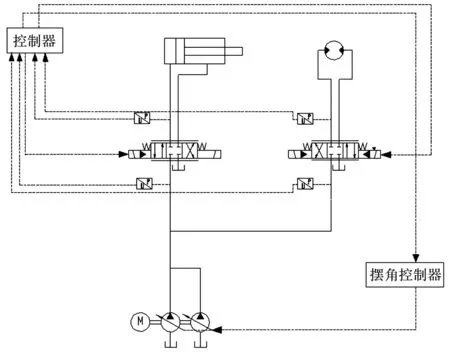
图2 定转速变排量泵阀协同液压系统原理图
1.2 总体控制策略
起重机执行器共有3种工作模式,分述如下:
1)在单动作快速运动模式下,为减少系统的节流损失,控制主阀阀口全开,合流阀全开,双动力源合流驱动单执行元件。笔者通过负载压力反馈、泵容积效率和预设流量来计算出电液比例泵摆角,得出液压泵实际输出流量补偿因负载变化引起的泵泄漏量,使系统流量维持稳定。
2)在单动作微动模式中,由于定转速变排量系统小流量时,液压泵摆角很小,系统动态响应比较慢。因此,系统采用流量分段控制的方法,小流量时,采用双变量模式控制系统;大流量时,仍然采用定转速变排量系统。笔者设定微动模式下的工作流量范围在60 L/min~80 L/min,设定一个流量阈值70 L/min,当预设流量高于70 L/min时,电机设置转速1 500 r/min保持不变,液压泵通过PID实时调节斜盘摆角,实现压力闭环控制目的,保持泵出口压力比最大负载压力高2 MPa;当预设流量低于70 L/min时,根据设定流量,按泵80%摆角工作点,计算该流量需求下电机的最小转速点,将最小转速点与通过PID控制器所得出的转速相比较取较大值,得出电机转速;液压泵通过PID控制实时调节摆角大小,实现压力闭环控制目的,保持泵出口压力比最大负载压力高2 MPa。
3)在复合动作模式状态下,合流阀关闭,主阀阀口全开,节流损失很小,系统处于流量控制模式,其属于泵控系统,双泵通过合流阀分流,单独泵源驱动每个执行元件,各联的阀口压差很小,能量损失也很小。已有的定转速变排量泵阀协同液压系统属于阀控系统,节流损失较大,并且泵出口压力与最大负载压力有关。因此,负载压力较小的那一联阀口压差很大,压损就很大,能量损失也很大。变转速变排量双动力源系统通过负载压力反馈和泵容积效率计算得出泵的实际所需流量,以此来补偿因负载变化引起的泵泄漏。在此状态下,通过调节单个动力源的相关参数来实时控制各执行元件速度,实现系统流量比例分流目的。
2 泵阀协同电液系统数学模型
2.1 永磁同步电机数学模型
为了减小转子直径,降低转动惯量以及改善动态性能,永磁同步电动机采用了凸型转子结构。在假设磁路未饱和、磁滞和涡流损耗无关以及空间磁场呈现正弦分布的条件下,采用转子磁链定向控制。
永磁同步电动机在同步旋转坐标系下的数学模型如下:
1)定子电压方程:
(1)
(2)
2)电机输出转矩方程:
(3)
3)转矩平衡方程:
(4)
式中:ud,uq为定子电压,V;id,iq为定子电流,A;R为定子电阻,Ω;L为电感,H;ωrm为转子角速度,rad/s;φr为永磁体产生的磁链,Wb;Te为电磁转矩,N·m;TL为负载转矩,N·m;np为极对数,null;Bf为阻尼系数,N·m·s;J为转惯量,kg·m2。
2.2 泵泄漏数学模型
通过电液比例多路阀的流量方程如下:
(5)
(6)
式中:Cd为电液比例多路阀的流量系数,null;w1,w2为电液比例多路阀的面积梯度,m;ρ为液压油密度,kg/m3;q1,q2为液压缸两腔的流量,m3/s;xv为电液比例多路阀阀芯开度,m;P1,P2为液压缸两腔的压力,Pa;Ps为液压泵出口压力,Pa。
忽略液压缸的外部泄漏,可知液压缸的流量连续性方程如下式所示:
(7)
(8)
式中:q1,q2为进入液压缸两腔的流量,m3/s;A1,A2为液压缸两腔的作用面积,m2;xp为液压缸的位移,m;Ctp为液压缸的内泄系数,m3/(s/pa);P1,P2为液压缸两腔的压力,Pa;V1,V2为液压缸两腔的容积,m3;βe为液压油的体积弹性模量,Pa。
电液比例柱塞泵动态输出压力方程如下式所示:
(9)
式中:Ps为液压泵的出口压力,Pa;βe为液压油的体积弹性模量,Pa;n为三相异步电机的转速,rad/s;D为液压泵的排量,m3/rad;up为电液比例泵的输入信号,null;q1为液压缸无杆腔的输入流量,m3/s;Q1为电液比例泵的泄漏流量,m3/s。
滑靴与斜盘间泄漏量qs,以及配流盘与缸体配流端面之间的泄漏qv分别为:
(10)
(11)
式中:pc为柱塞泵壳体压力,Pa;hv为配流副油膜间隙厚度,mm;hs为为滑靴副油膜间隙厚度,mm。
根据上述式(1)~式(11),笔者搭建了永磁同步电机、轴向柱塞变量泵和电液比例多路阀的仿真模型[15-19]。
3 电液系统元件模型
笔者以徐工XCT55t汽车起重机为基础,建立了液压起重机变转速变排量双动力源电液系统的AMESim和Simulink联合仿真模型。
该系统由永磁同步电机、电液比例泵、比例多路阀、液压缸和变幅机构组成。
3.1 永磁同步电机模型仿真分析
矢量控制技术的灵感来自于直流电动机的电枢电流与励磁电流相互垂直的特点。笔者在同步旋转坐标d-q中进行坐标变换,建立了永磁同步电动机的数学模型。在d-q坐标系中,可以通过控制电流的大小和方向来实现磁场和转矩的解耦控制目的。通过解耦直轴和正交轴分量,可以独立地控制磁场的大小和方向,以及电机的转矩。这种控制方法使得控制过程更加灵活和可靠,提高了系统的性能和效率,控制性能与直流类似。
笔者比较了转速指令与检测到的电机转速,经过转速环PI控制器输出交轴电流指令,同时将直轴电流设为零;然后将电流指令与反馈的id和iq进行比较,通过电流环PI控制器得到ud和uq;接着通过反Park变换获得uα和uβ;最后,采用空间矢量脉宽调制(space vector pulse width modulation,SVPWM)算法输出6个脉宽调制(pulse width modulation,PWM)波来驱动逆变器,从而产生频率和振幅可变的三相正弦电压,用来驱动电机旋转。
永磁同步电机id=0矢量控制原理图如图3所示[20-22]。

图3 永磁同步电机id=0矢量控制原理图
笔者在Simulink中搭建了永磁同步电机的仿真模型,并且使用汇川电机ESMG1-31D20CD型号的参数进行设置。
永磁同步电机主要参数如表1所示。
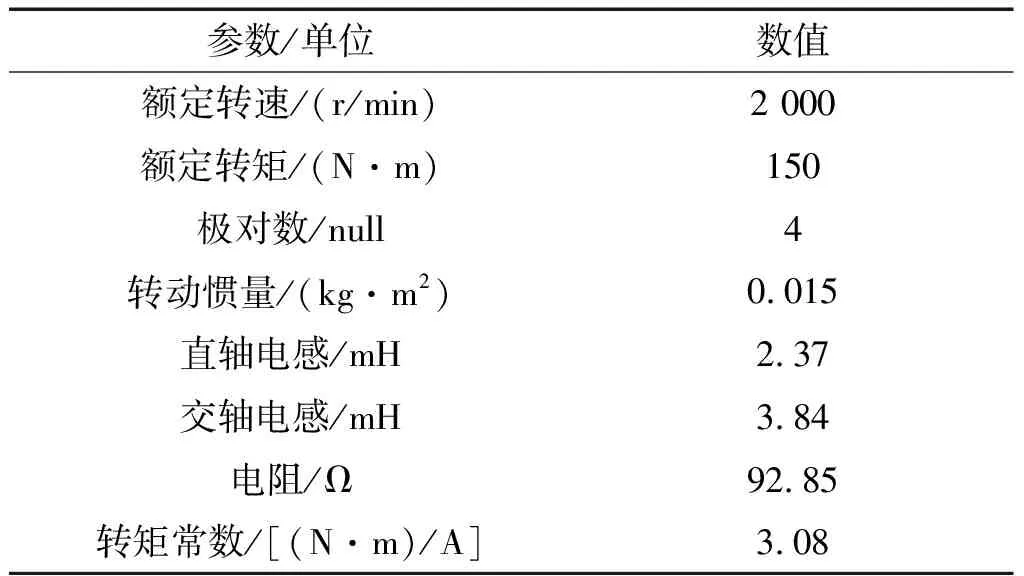
表1 永磁同步电机主要参数表
笔者在Simulink中搭建的永磁同步电机仿真模型如图4所示。

图4 Simulink中搭建的永磁同步电机模型
负载转矩初始设定为零,电机空载启动,0.2 s时,负载转矩加T=20 N·m;给定转速初始给定为n=1 000 r/min,0.4 s时,加速至n=1 200 r/min。
永磁同步电机转速、电磁转矩仿真结果如图5所示。

图5 转速、电磁转矩仿真波形
从图5仿真结果可以看到:电机启动时的定子电流较大,电磁转矩较大,响应速度快,电机能够快速稳定地达到给定转速,启动时间为0.06 s,并且存在5.9%的超调,稳定后电机的转速平稳;在0.2 s时,负载转矩加至20 Nm,电机出现小幅度的转速降落,转速降落了27 r/min,即存在2.7%的转速降落,恢复时间为0.025 s;当电机加速至1 200 r/min时,电机能够快速稳定地调整转速至1 200 r/min,系统存在着3.2%超调,调整时间为0.02 s。
3.2 电液比例泵泄漏模型
当负载变化时,电液比例泵泄漏量不同,泵出口流量不稳定,会导致执行器速度不稳定。
因此,笔者建立电液比例泵泄漏模型,分析电液比例泵泄漏量变化。笔者选择L11VO115L电液比例柱塞泵作为变转速变排量双动力源泵阀协同液压系统的动力源。该泵的单泵排量为115 mL/r,柱塞数目为9个,最大转速为2 400 r/min。
电液比例泵的泄漏途径有缸体和柱塞之间、滑履与斜盘之间、液压缸和配流端面之间,以及电液比例泵变量机构动作所需的流量。另外,由于液压系统中有降温系统,则油液温度波动范围较小,对泄漏影响可以忽略不计。
单柱塞的泄漏模型如图6所示。
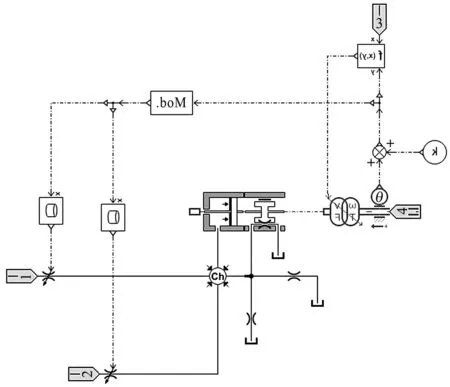
图6 电液比例泵单柱塞模型
在图6中,有两个固定的节流口,表示柱塞与缸体之间的泄漏以及柱塞滑履与斜盘之间发生的泄漏。柱塞与缸体之间的参数设置为0.000 185乘以压差dp;同样地,滑履与斜盘之间的泄露设定为为0.000 379乘以dp;在右侧的f(x,y)函数中,设定为0.066 5×cos(y×PI/180)×sin(x×PI/180),柱塞的死体积设置为设为2 cm3。
图中有两个MOD,上面的是出油口,下面的是进油口。出油口的信号响应的偏移量为:180+360/nbpist,进油口为:360/nbpist。信号功能的ASCII文件中定义输出为ASCII码,每个柱塞有不同的意义,用于定义每个柱塞在吸油和排油时所转过的角度。笔者将9个单柱塞进行封装,建立包含9个柱塞在内的柱塞泵模型。
泵的液压模型如图7所示。

图7 电液比例泵仿真模型
电液比例泵等流量曲线如图8所示。
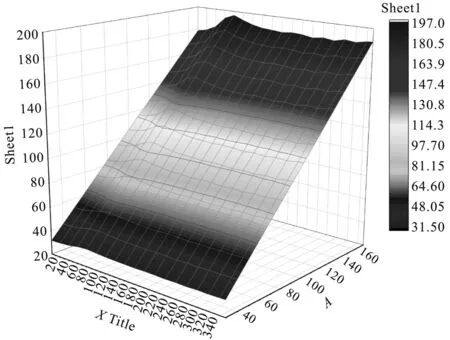
图8 电液比例泵等流量曲线
图8中的流量是由泵容积效率(电液比例泵的仿真结果所得出的)、所需实际流量与负载压力之间的关系计算得出。
3.3 比例多路阀模型
笔者采用力士乐M7系列的抗流量饱和比例多路阀作为变转速变排量双动力源泵阀协同电液系统的控制阀,M7系列抗流量饱和负载敏感液压系统比例多路阀用来控制压力流量复合的液压系统的控制阀。
对M7系列抗流量饱和负载敏感液压系统比例多路阀进行拆解后,可以发现液压油依次通过容积腔、一次节流口、压力补偿器、二次节流口,然后通过A口或B口进入执行机构。如果去掉压力补偿器,可以用一个容积腔来代替压力补偿器部分。
一次节流口是由6种12个U型槽组成的多级结构。在AMESim中没有该元件,因此,笔者需要使用BASEN01模块来计算阀芯位移与过流面积的函数关系曲线,并导出data文件;然后,使用生成的data文件,将其导入Bao9元件中,建立一次节流口模型。
过流面积计算模型如图9所示。
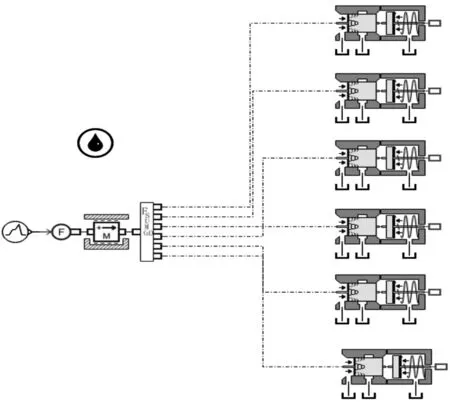
图9 过流面积计算模型
一次节流口过流面积与阀芯位移曲线如图10所示。
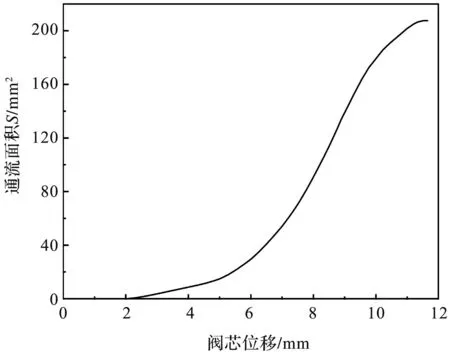
图10 过流面积与阀芯位移曲线
4 定转速变排量液压系统仿真模型搭建和试验
4.1 液压系统仿真模型搭建
笔者选用AMESim软件搭建了定转速变排量泵阀协同液压系统仿真模型。该系统由比例多路阀、电液比例泵、变幅机构、液压缸组成。
变转速变排量双动力源泵阀协同电液系统系统AMESim模型如图11所示。
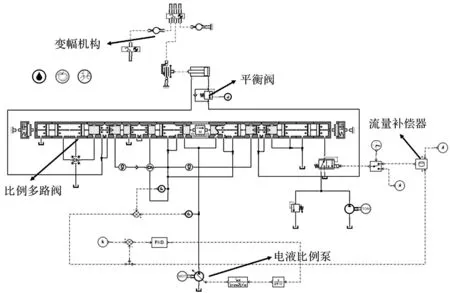
图11 定转速变排量泵阀协同液压系统模型
4.2 液压系统试验平台搭建
定转速变排量泵阀协同液压系统主要针对的是起重机的举升过程,因此,可以选用比例溢流阀代替变幅机构,作为该试验的加载装置。
试验平台由电液比例泵A11vo115L、三项异步电机LMP-250M-4、力士乐M7系列比例多路阀(变幅联)、三通比例减压阀PPCD05-NG、比例溢流阀、油箱、压力传感器M5134-C2501X-050BG、控制器和管路等其他辅助元件组成。
试验装置参数如表2所示。

表2 试验装置参数
笔者在液压泵型式试验台上搭建了定转速变排量泵阀协同液压系统试验平台,如图12所示。

图12 定转速变排量泵阀协同系统试验台
4.3 液压系统仿真与试验分析
对于定转速变排量泵阀协同液压系统,笔者设置负载压力逐渐增大。液压泵最大出口压力设为28 MPa,设定系统的目标流量分别为60 L/min、70 L/min。微动模式分为两个阶段:在第一阶段,分别设定多路阀的阀口开度为4.5 mm、4.75 mm和4.9 mm,电液比例泵设定为压力闭环模式,始终保持泵的出口压力比负载压力高1.5 MPa,实现负载敏感目的;而后,经过10 s后进入第二阶段,根据手柄设定的流量,系统开始用流量补偿器进行补偿,此阶段运行15 s。
定转速变排量泵阀协同液压系统的输出流量、液压泵出口压力和负载压力曲线如图13所示。

图13 定转速变排量泵阀协同液压系统仿真与试验曲线
对图13进行分析可知:给定不同的目标流量,系统最后均可稳定到目标流量值附近。而且,当负载压力发生变化时,电液比例泵通过压力闭环的调节,始终能跟随负载压力的变化而变化,实现负载敏感目的。同时,通过仿真曲线与试验曲线的对比,基本验证了仿真模型的准确性。
但是从仿真结果和实验结果也可以看出:系统流量波动明显,60 L/min时系统动态响应较慢。由于定转速变排量系统小流量时,泵摆角响应较慢,而泵的动态响应比阀慢,使得泵阀之间协调性较低,系统流量控制精度较低;但可以间接验证后续模型的正确性。因此,笔者提出变转速变排量双动力源泵阀协同液压系统来进一步改善这种情况。
5 变转速变排量电液系统模型
通过对力士乐M7系列多路阀的分析,笔者可以将压力补偿器从多向阀的各个环节上拆下。压力传感器放置在一次节流口的前后,以实时检测前后的压力;双联电液比例泵应更换为双动力源;合流阀应放置在双动力源的出口处,控制器直接调节电液比例泵的旋转角度和同步电机的转速;然后建立模型。
变转速变排量双动力源泵阀协同电液系统AMESim模型如图14所示。

图14 变转速变排量双动力源泵阀协同电液系统AMESim模型
5.1 单动作微动模式
针对变幅联单动作微动模式仿真,笔者设置起始角度为0°,臂架质量为11 500 kg,液压泵最大出口压力为28 MPa。此时,合流阀全开,其中一个动力源卸荷,另一个动力源正常工作,系统处于压力控制模式,流量进行分段控制,设定流量阈值70 L/min。
当预设流量大于等于70 L//min时,系统设置为定转速变排量,电机转速设置为1 500 r/min,通过PID控制器对泵的摆角进行控制,使得泵的出口压力始终比最高负载的压力高出一个固定值2 MPa,以实现对负载的敏感控制目的;当预设流量低于70 L/min时,根据设定流量,按泵80%摆角工作点,计算该流量需求下电机的最小转速点,将最小转速点与通过PID控制器所得出的转速相比较,取较大值,得出电机转速;液压泵摆角继续用PID控制器作为压力闭环控制,泵摆角在80%上下波动。
单动作微动模式下系统输出流量80 L/min时,流量、阀口压差对比如图15所示。

图15 预设流量80 L/min时的新旧系统流量、阀口压差
从图15结果对比分析可知:变转速变排量双动力源泵阀协同电液系统的仿真模型曲线与定转速变排量泵阀协同液压系统相比,仿真模型流量曲线可以达到80 L/min的预设值,泵出口压力也可以保持在高于负载压力2 MPa,说明该变转速变排量双动力源泵阀协同电液系统可以将阀前后压差保持在预设值;并且从仿真结果可以看出,新系统输出流量比旧系统输出流量的控制精度优化了4.67%。
单动作微动模式下系统输出流量60 L/min时,流量、阀口压差对比如图16所示。

图16 预设流量60 L/min时新旧系统流量、阀口压差
从图16可以看出:采用双变量控制模式,系统的动态响应、流量分辨率都进一步地提高了。由于定转速变排量系统小流量时,液压泵摆角很小,系统动态响应比较慢。因此,进行流量分段控制,小流量时,采用双变量模式控制系统,系统动态响应加快,且泵阀协调性提高,流量分辨率上升。
通过结果对比分析可知:变转速变排量双动力源泵阀协同电液系统的仿真模型曲线与定转速变排量泵阀协同液压系统相比,仿真模型流量曲线基本可以稳定在60 L/min的预设值,泵出口压力也可以保持在高于负载压力2 MPa。
以上结果说明,变转速变排量双动力源泵阀协同电液系统可以将阀前后压差保持在预设值;并且从仿真结果可以看出,新系统输出流量比旧系统输出流量的控制精度优化了14.76%,系统动态响应时间减少了0.12 s。
5.2 单动作快速运动模式
在单动作快速运动模式中,笔者设置变幅联2 MPa到20 MPa的阶跃信号为模拟负载,阶跃时间为5 s,仿真时间设置为10 s;控制主阀先导压力为2 MPa,使主阀阀口全开,液压泵转速为1 500 r/min。合流阀全开,双动力源合流控制单执行元件;通过控制双电液动力源参数来补偿因负载变化引起的泵泄漏量。由于负载变化很大,旧系统单纯用手柄控制流量变化是很大的,泄漏补偿后,新系统的整个流量曲线变化是均匀的。
液压泵输出流量、泵出口压力曲线如图17所示。

图17 新旧系统输出流量、泵出口压力
从图17可以看出:由于负载变化很大,旧系统单纯用手柄控制流量变化是很大的;而新系统通过控制双电液动力源参数来补偿因负载变化引起的泵泄漏量,泄漏补偿后,新系统的整个流量曲线变化减小。
液压泵输出功率、输出能量曲线如图18所示。

图18 新旧系统输出功率、输出能量
从图18可以看出:由于系统主阀阀口全开,阀口压差很小,减小了节流损失,使新系统能耗降低。
由仿真结果可知:在2 s负载突变时,新系统比旧系统流量变化减小了6.21%,系统消耗能量降低了13.94 kJ,满足该执行元件快速运动时的流量需求。
5.3 复合快速运动模式
对于复合快速运动模式的仿真,笔者设置变幅联2 MPa到20 MPa的阶跃信号为模拟负载,卷扬联1 MPa到10 MPa的阶跃信号为模拟负载,阶跃时间均为5 s,仿真时间为10 s;设置卷扬联主阀的先导压力为2 MPa,变幅联主阀的先导压力为1.9 MPa,使主阀阀口全开,液压泵转速为1 500 r/min,液压泵最大出口压力为28 MPa。
变幅联系统的输出流量、液压泵出口压力如图19所示。

图19 变幅联系统输出流量、泵出口压力
卷扬联系统的输出流量、液压泵出口压力如图20所示。

图20 卷扬联系统输出流量、泵出口压力
从图19、图20可以看出:由于变幅联和卷扬联负载变化较大,系统泄漏补偿后,新系统的整个流量曲线变化明显减小。
液压泵输出功率、输出能量曲线如图21所示。

图21 新旧系统输出功率、输出能量
从图21可以看出:各联的能耗有显著减小。此时,由于新系统合流阀关闭,系统处于流量控制模式,其属于泵控系统,双泵通过合流阀分流实现系统比例分流的目的;单独泵源驱动每个执行元件,主阀阀口全开,各联的阀口压差很小,减小了通过阀口开度来实现比例分流带来的压力损失,使系统能耗降低。旧系统双泵合流通过阀口开度来实现比例分流,其属于阀控系统,节流损失较大,并且泵出口压力随着最大负载压力变化。因此,负载压力较小的那一联阀口压差会很大,节流损失很大,能量损失也很大。在负载变化相同的前提下,新系统比旧系统泵的输出压力减小了,泄漏量也减小了。
通过仿真结果表明:在5 s负载突变时,变幅联新系统比旧系统流量变化减小了2.08%,卷扬联新系统比旧系统流量变化减小了4.49%,新系统消耗能量降低了50.31 kJ,阀口压差显著减小。
6 结束语
笔者以起重机泵阀协同压力流量复合控制系统为研究对象,搭建了变转速变排量双动力源泵阀协同液压系统仿真模型,并进行了仿真分析;通过对定转速变排量泵阀协同液压系统试验结果的分析,间接验证了变转速变排量双动力源泵阀协同液压系统仿真模型的正确性,给起重机的流量控制系统提供了新的参考。
研究结论如下:
1)相较于泵阀协同压力流量复合控制系统,变转速变排量双动力源液压系统具有可以实时调节转速和排量的特性,使新系统在微动模式下控制精度优化了14.76%,动态响应时间价减少了0.12 s;
2)变转速变排量双动力源液压系统在单动作快速运动模式和复合快速运动模式下,系统处于流量控制模式,其属于泵控系统,阀口全开,减少了节流损失,利用负载压力反馈和泵容积效率,计算出泵实际出口流量,补偿了因负载变化而引起的泵泄漏,使得泵出口流量能够满足负载快速动作时的流量需求。并且在复合快速运动模式下,通过双动力源分流实现了系统比例分流的目的,减小了通过阀口开度来实现比例分流带来的压力损失,使系统能耗降低了约50.31 kJ。
在后续的研究中,笔者将对变转速变排量泵阀协同液压系统进行试验,进一步验证该泵阀协同液压系统的有效性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
能源工程(2022年2期)2022-05-23
房地产导刊(2021年11期)2021-11-27
水泵技术(2021年3期)2021-08-14
水泵技术(2021年2期)2021-07-31
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
天然气工业(2020年4期)2020-05-16
现代商贸工业(2016年9期)2017-01-07
专用汽车(2016年4期)2016-03-01
