
基于FPGA的极紫外光谱图像处理系统
2024-03-25 08:55:50孙波刘冲张洪明吕波尹相辉林子超沈永才计华健符佳王福地胡奎范玉毛立宇曾超
核技术 2024年3期
孙波 刘冲 张洪明 吕波,3 尹相辉 林子超,3 沈永才计华健,3 符佳 王福地 胡奎,5 范玉 毛立宇 曾超
1(南华大学 电气工程学院 衡阳 421001)
2(中国科学院合肥物质科学研究院 等离子体物理研究所 合肥 230031)
3(中国科学技术大学研究生院 科学岛分院 合肥 230031)
4(合肥师范学院 物理与材料工程学院 合肥 230601)
5(安徽大学 物质科学与信息技术研究院 合肥 230601)
东方超环(Experimental Advanced Superconducting Tokamak,EAST)全超导托卡马克磁约束聚变实验装置是由中国科学院等离子体物理研究所设计并运行,用于研究近堆芯高参数和长脉冲稳态先进等离子体运行问题的重要实验平台[1]。由于等离子体与装置壁之间的相互作用,EAST等离子体中不可避免会产生杂质成分。这些杂质会降低等离子体约束性能,甚至造成等离子体破裂并对装置安全造成威胁。因此,如何有效地测量杂质含量对托卡马克装置运行和杂质行为物理研究有着重要的意义[2-4]。目前,EAST装置上已经发展了可见光波段、真空紫外(Vacuum Ultraviolet,VUV)波段、极紫外(Extreme Ultraviolet,EUV)波段和X射线波段等多套光谱诊断系统来观测等离子体中杂质辐射[5]。2011年在EAST装置上研制了首套EUV光谱诊断系统,用于高温等离子体高电离态杂质线辐射研究,工作波段1~50 nm[6-8]。EUV光谱诊断系统使用电荷耦合器件(Charge Coupling Device,CCD)探测器进行光谱图像的采集,所采集光谱图像的横、纵坐标像素代表了不同的空间位置和波长位置,像素点的灰度则反映了光谱强度,可通过软件将原始图像数据显示成三维谱线图等多种形式用于实验数据的分析。
EUV光谱诊断系统所采集的光谱图像存在噪声干扰,主要是由于CCD探测器在采集光谱的过程中会引入各种各样的噪声,从而影响测量结果的准确性[9]。其中暗电流的累积所引起的噪声会导致光谱曲线出现基线漂移,在光谱图上形成较大波动和毛刺,对成像质量造成较大影响[10-11]。研究表明,制冷温度达到-30~-50 ℃时,暗电流能得到有效抑制[12-14]。同时,EAST等离子体发出的硬X射线辐射直接照射在CCD探测器感光芯片上,会在光谱图像上产生大量的单像素毛刺噪声,为准确分析等离子体中的杂质辐射带来了严重干扰。通过优化CCD探测器结构设计,提高系统屏蔽硬X射线能力可以在一定程度上抑制噪声的产生,但是对目前商业化的CCD探测器而言,很难进行有效的结构改造。此外,由于EUV光谱诊断系统采用掠入射的光路结构,硬X射线可以穿透光谱仪真空腔室直接照射在CCD探测器感光芯片上。考虑到未来聚变堆需要长脉冲运行,在运行的过程对采集的数据进行实时的处理会更有利于判断运行状态与保护装置安全,因此,将去噪算法直接与硬件系统结合对采集图像进行实时优化成为新的发展方向[15-17]。
现场可编程门阵列(Field Programmable Gate Array,FPGA)具有强大的数据处理能力,可以满足对于光谱图像的实时优化和去噪处理的计算需求。此外,FPGA可进行重复编程,可以根据后续的需求对去噪算法进行调整和优化,以适应不同的光谱图像和噪声特征,而无须进行硬件系统的更换。更重要的是,FPGA可以与CCD探测芯片、数据采集模块等进行连接和协同工作,实现高效的数据传输和处理,形成完整的硬件采集与数据处理系统,从而提高系统整体的性能和效率。
基于上述考虑,本文设计了一套基于FPGA的EUV光谱图像处理系统,用于实时、便捷地去除采集图像中的干扰噪声。基于改进的限幅滤波算法为核心进行EUV光谱处理系统设计,可以有效地检测和去除噪声点,最大程度保留图像的原始信息。此外,该系统使用FPGA实现算法,能够集成到CCD探测器中,提高探测器输出图像数据的可读性。
1 系统整体设计
本文设计的EUV光谱图像处理系统主要包含Testbench模块、HDMI(High Definition Multimedia Interface)传输模块、离均差去噪模块和数据判别限幅滤波模块。Testbench模块可以用于生成测试激励(波形),并且用于检查待测模块是否满足设计要求。由于EAST实验装置在复杂环境下进行,无法现场进行仿真调试,所以使用Testbench模块将BMP(Bitmap)格式的光谱图片转换成视频流发送出去来模拟实时采集场景,并在处理完成后将视频流重新制作成BMP光谱图片来观察算法处理效果。HDMI传输模块基于输入接口芯片SIL9011和输出接口芯片ADV7511来实现数据的回环。由于HDMI传输的数据位宽为24 bit,故输入环节将8 bit位宽的图像数据进行低位扩充,扩充后的数据通过HDMI后再恢复至8 bit位宽进行处理,输出环节反之。离均差去噪模块接收原始光谱图像并进行第一次滤波,主要去除一些幅值较大的干扰噪声。数据判别限幅滤波模块接收经过离均差去噪模块预处理后的图像数据,能去除一些中小幅值的干扰噪声,且不影响幅值较大的有效信号。光谱图像经过该系统后,能去除3个位宽以下的光谱噪声并保持有效光谱数据的真实性。EUV光谱图像处理系统以并行流水线的处理方式进行工作,具有速度快、体积小、兼容性强等特点。系统设计框图如图1所示。
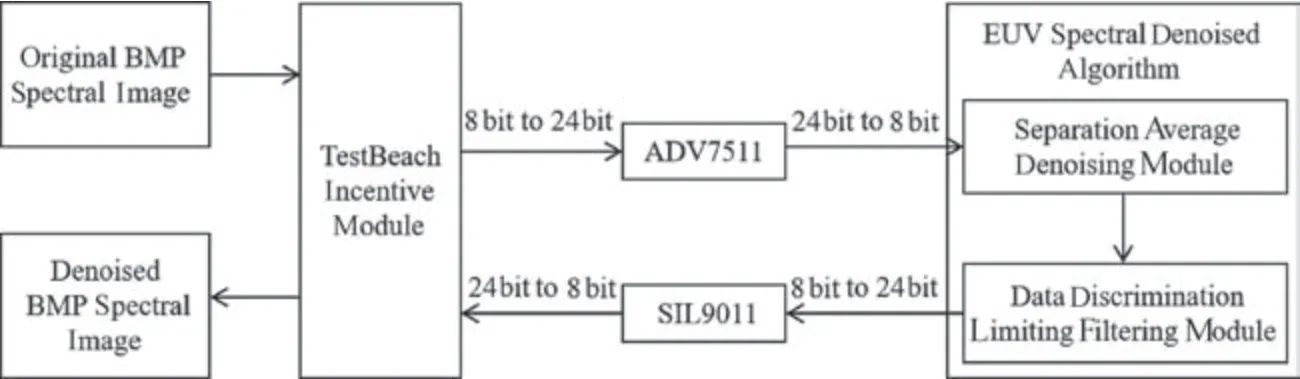
图1 系统设计框图Fig.1 Block diagram of the system design
BMP图像是Windows操作系统中的标准图像文件格式,采用位映射存储格式,不采取任何压缩。实验所用到的BMP格式光谱图像单幅大小4 195 382个字节,包含4个部分:文件头,共14字节,保存文件的格式、大小等信息;位图信息,共40字节,保存图像数据的尺寸、位平面数、压缩方式、颜色索引等信息;调色板,共1 024字节,是索引与其对应颜色的映射表;位图数据,共4 194 304字节,包括所有的光谱信息。
根据BMP的格式信息编写Testbench文件,利用原BMP文件的前1 078字节生成一个不包含位图数据的空白BMP文件,再将经过处理的位图数据按顺序填充进去,制作成新的BMP文件。BMP生成流程如图2所示。

图2 BMP文件生成流程图Fig.2 Flowchart for BMP file generation
2 滤波算法
2.1 数字滤波算法的选择
针对干扰信号常用的滤波算法有中值滤波算法、滑动平均滤波算法以及限幅滤波算法[18]。中位值滤波算法能够有效克服偶然因素引起的脉冲干扰,对缓慢变化的被测量数据有较好的滤波效果,但不适用于快速变化的实验数据[19]。滑动平均滤波算法适用于高频振荡系统,对周期性干扰有良好的去噪效果,但灵敏度低,对偶然脉冲干扰的抑制作用较差[20]。以上两种使用较广的滤波算法虽然去噪效果较好,但是对所有数据均进行处理,破坏了采集数据的真实性。
限幅滤波算法是一种消除偶然脉冲干扰的方法。与中位值滤波算法不同的是,它仅针对出现干扰的数据段进行处理,能很好地保护数据的整体真实性。限幅滤波算法通过样本集来确定两次采样的最大允许误差。如果前后采样值的偏差超过了限幅阈值D,认定发生了随机干扰,并用采样值Xn-1替代非法采样值Xn。若两者之间的偏差未超过限幅阈值,则认为本次采样值有效。使用Xn来代表第n个样本数据,D代表预先设置的限幅阈值,可将公式描述为:
限幅阈值的取值需要兼顾干扰噪声的去除和有效光谱的保持,如限幅阈值设置过大,会漏掉偏差低于阈值的低频噪声,如果限幅阈值设置过小,一些高频有效信号会被视为噪声去除[21]。所以设置固定的阈值不具有合理性和普适性,容易导致处理后的光谱信号失真且降噪效果不理想。
2.2 限幅滤波算法的改进
为了进一步提高算法的有效性,本文将标准差和离均差引入限幅滤波算法。标准差描述数据的分布状态,还可以作为度量标准,描述某个具体数值与均值的标准距离。标准差随着数据波幅而改变。相较于固定限幅阈值,使用样本集的标准差作为阈值减弱了原本算法中的限幅效果,增强了算法对形态上较为尖锐的波峰的检测效果。离均差是数据与均值之差,反映了原始数值偏离均值的程度,相较于样本偏差更加平滑稳定,在数值波动较大的情况下能保留更多的原始信息。在EUV光谱图像数据中,最窄的有效数据宽度为3个像素点,当采样窗口宽度设置为5或7时,会提高3信号位宽数据的误判率,影响最终的处理结果,经测试后将采样窗口宽度设置为3最为合理。经过上述改进后的离均差去噪算法如下:
式中:S为样本集标准差;X为样本值。
离均差算法能够去除幅值较大的干扰噪声,但是对于中小幅值噪声的效果并不理想。针对这一情况,根据EUV的光谱特性加入数据判别环节:当滤波算法检测出异常值时,比较当前数据是否大于两倍样本集最小值,如成立则判定该数据为高幅值有效信号,反之则判定该信号为干扰噪声。加入数据判别的限幅滤波算法依旧使用样本集标准差代替限幅阈值。数据判别限幅滤波算法由于加入了数值条件上的限制,已无法对幅值过大的样本集进行处理,但对中小幅值、位宽低于3的干扰噪声依旧有很强的过滤效果,所以该算法能够去除大量的中小幅值噪声且高位有效数据得以更好地保留。
3 仿真实验
本文仿真实验选取两次EAST装置实验(放电炮号:#114816和#114832)中的EUV光谱数据进行处理对比。使用Andor Solis软件将SIF格式光谱输出为BMP格式光谱图像,单帧图像尺寸为2 048×2 048 pixels,单个像素点灰度深度为256。如图3(a)所示,其中横轴为光谱诊断系统观测的波长,纵轴为等离子体辐射在垂直方向的强度分布,而图像颜色在图3(b)中表示辐射谱线的强度。在利用CCD探测器进行图像采集过程中,对垂直方向的2 048个通道进行了信号并道(Binning)处理,垂直方向通道Binning为20个采集通道,以增强信号信噪比,并降低图像读出时间。图3(b)展示了20个通道的谱线强度。
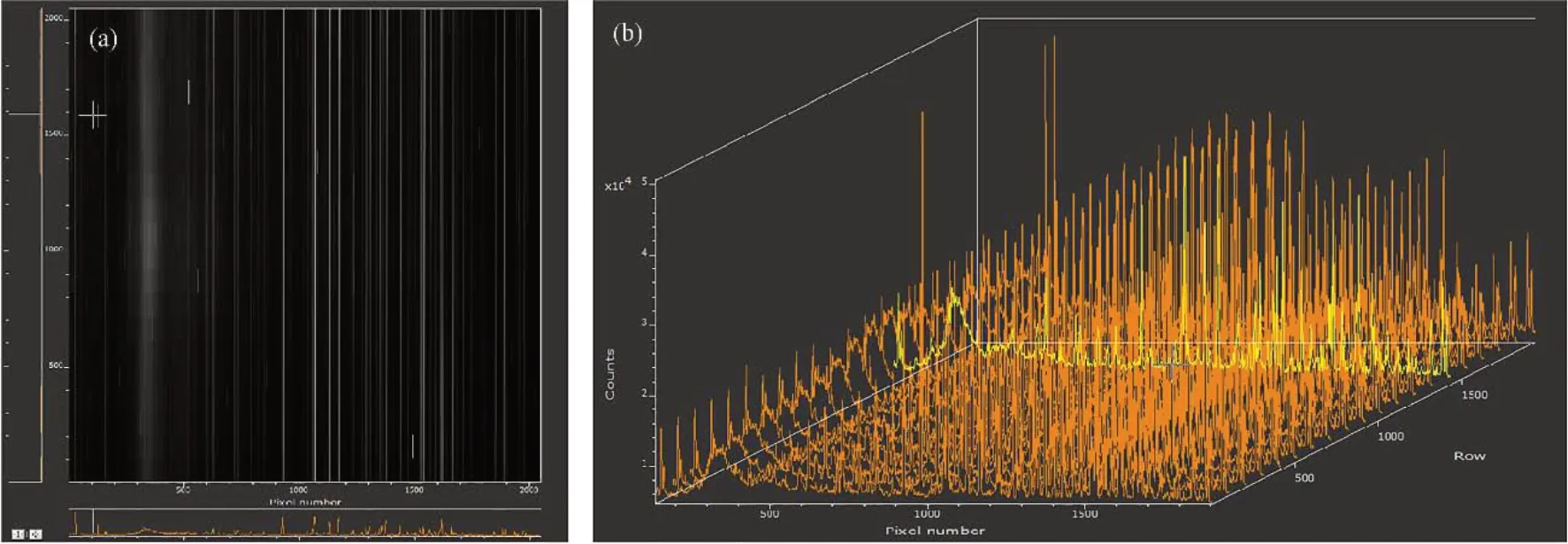
图3 探测器采集软件用两种模式显示的放电炮号#114816第19帧原始数据(a) 二维Image光谱图,(b) 三维光谱分布图(彩图见网络版)Fig.3 Raw data of frame 19 of discharge sequence number #114816 displayed in detector acquisition software in two modes(a) Two-dimensional image spectrogram, (b) Three-dimensional spectral distribution (color online)
系统使用EUV图像采集系统进行原始数据的采集,AX7Z100 ZYNQ平台进行仿真验证,基于VIVADO 2017.4进行设计。系统实验平台如图4所示,EUV图像采集系统主要由Andor CCD探测器、McPHERSON光谱仪、光路结构及连接设备组成,FPGA仿真验证平台由5 V电源供电器、HDMI输入线、HDMI输出线及AX7Z100开发板所带板间资源等组成。图像通过两根HDMI线组成一个数据回环来实现图像的输入输出,首先PC端通过仿真激励模块将原始图片转换为视频流,经过数据的位宽转换后通过HDMI输入至开发板,输入图像数据经过FPGA降噪处理后,再通过HDMI输出至PC端进行位宽转换并生成图片。EUV图像处理系统的仿真时序波形图如图5所示。其中clk为时钟信号;rst为复位信号;以BMP开头的信号表明了光谱图片的位图信息;wr_data和dout是图像数据的输入输出信号;din_vld是输入数据有效信号,高电平有效;dout_vld是输出数据有效信号,高电平有效,有效起始位相比din_vld延迟了9个时钟周期。
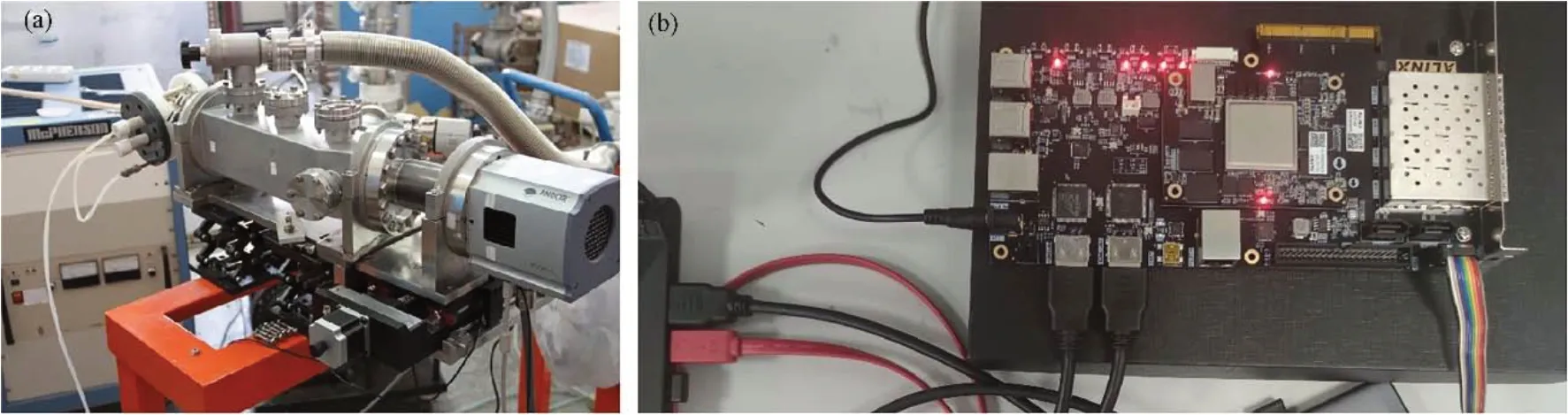
图4 系统实验平台照片 (a) EUV图像采集系统,(b) FPGA仿真验证平台Fig.4 Photos of system experimental platform (a) EUV image acquisition system, (b) FPGA simulation platform
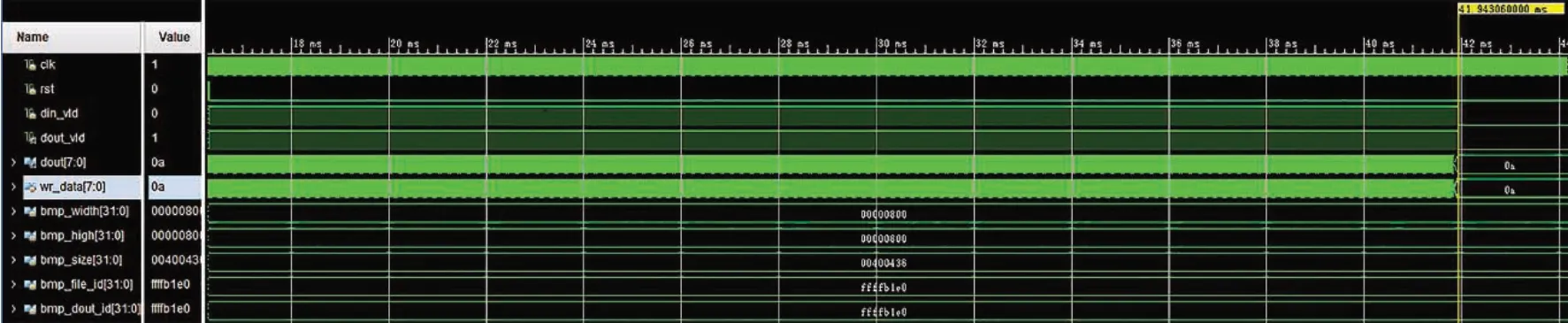
图5 仿真时序波形图Fig.5 Simulation sequence diagram
通过仿真时序波形图可知,一个时钟周期可以处理一个像素数据,在时钟频率设置为100 MHz的情况下,处理一幅大小2 048×2 048 pixels的光谱图像约用时42 ms。CCD探测器的采集帧率为每秒5帧,通过FPGA实现的EUV光谱图像处理算法可以达到实时处理的效果。
4 分析与讨论
对图6中EUV光谱图像处理效果对比图进行观察,可以发现,放电炮号#114816第19帧原始图像所含噪声较少,经过该系统处理后所含噪声点基本去除。放电炮号#1148132第9帧原始图像所受噪声干扰严重,在单通道上已无法观测,但经过本文系统处理后噪声点大幅减少,数据可用性明显提高。根据图像处理结果,该系统基本达到我们预期的去噪效果。
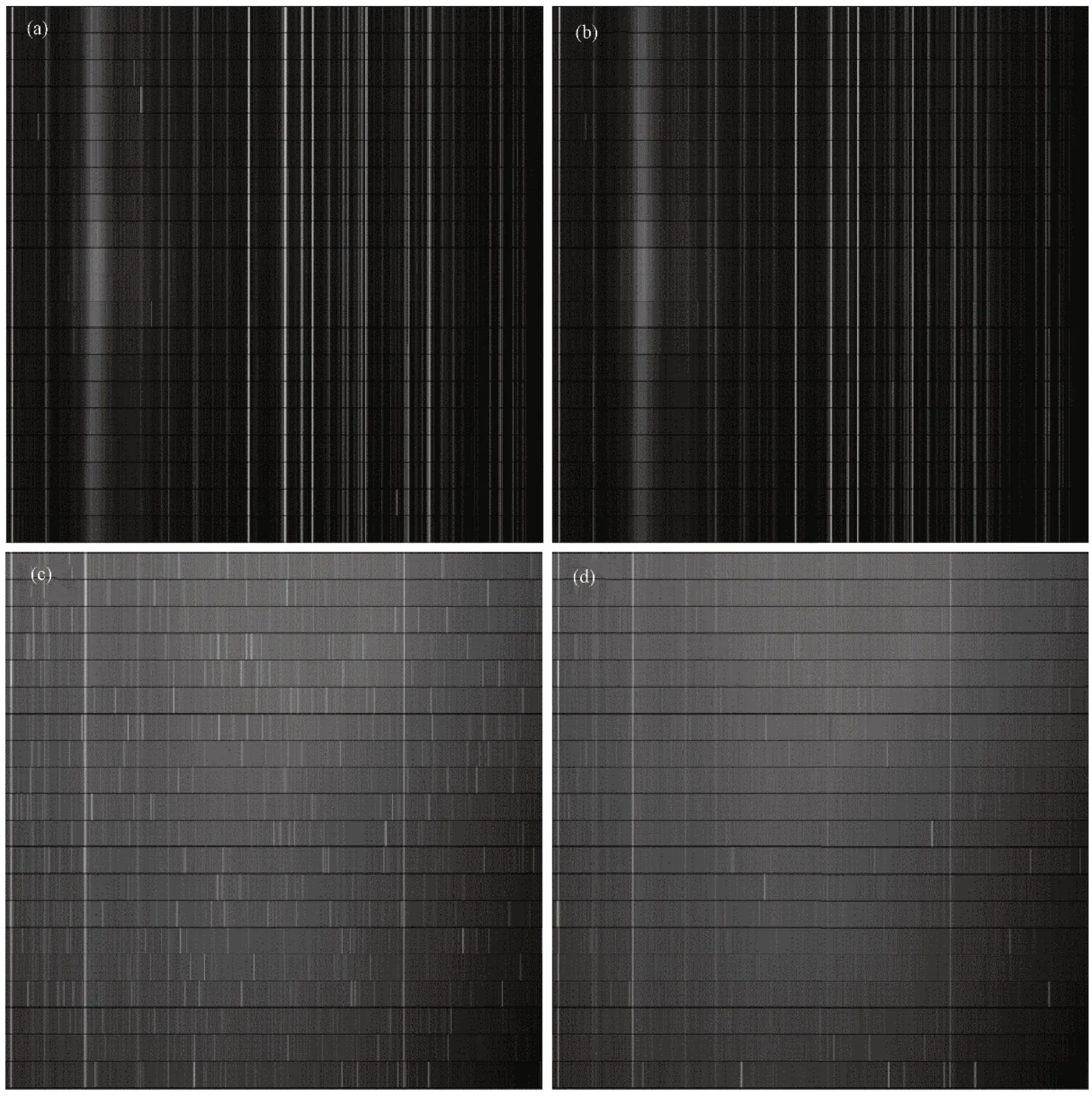
图6 EUV光谱图像处理效果对比图(放电炮号#114816、#114832)(a) #114816图像处理前,(b) #114816图像处理后,(c) #114832图像处理前,(d) #114832图像处理后Fig.6 Comparison chart of EUV spectral image processing effect (discharge sequence #114816, #114832)Before #114816 (a) and after #114816 (b) image processing, Before #114832 (c) and after #114832 (d) image processing
光谱图像数据的相邻行数代表了相邻的空间位置,相邻行的对应列数据不会发生较大的突变。根据这一现象可以对比图7放电炮号#114816第19帧3、4、5通道谱线图来鉴别有效信号位置、真实信号强度以及干扰噪声,其中图注“channel_3”、“channel_4”和“channel_5”分别代表了放电炮号#114816光谱图像处理前的3、4和5通道数据。图中标注序号a、b、e处均有幅值较小的干扰噪声;标注序号c、d处则是有效波峰中混入了干扰噪声,影响了原本的真实信号值。该幅图像受噪声影响较少,在其余位置并未出现大幅值的干扰噪声。
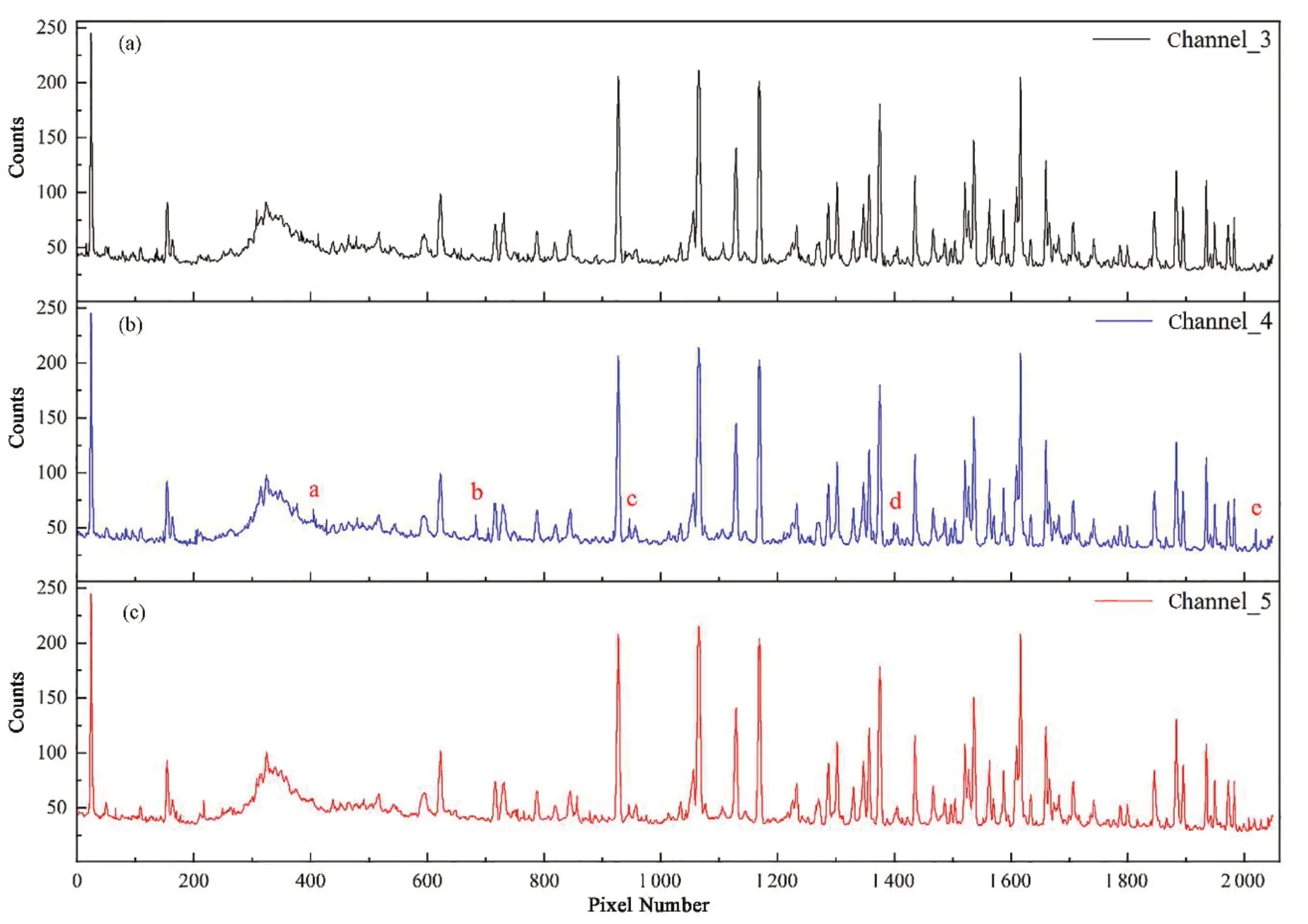
图7 放电炮号#114816第19帧3、4、5通道谱线图 (a) 第3通道,(b) 第4通道,(c) 第5通道Fig.7 Spectra diagram of channel 3, 4 and 5 in frame #19 of discharge sequence number #114816(a) Channel 3, (b) Channel 4, (c) Channel 5
图8展示了EAST放电炮号#114816放电过程中采集的第19帧4通道的处理前后光谱,图注original和denoising分别代表了原始光谱数据和处理后光谱数据。经过观察发现:标注序号a、b、j处的干扰噪声完全去除;标注序号c、d处受到噪声影响的波峰有所恢复,且输出值接近于预估真实值;标注序号e、f、g、h、i处波峰强度在去噪后有所下降,是因为这几处原始光谱宽度较窄,在波峰处的形态特征接近于干扰噪声,导致系统误判。

图8 放电炮号#114816第19帧4通道谱线处理前后对比图Fig.8 Comparison of spectra of channel 4 before and after processing in frame 19 of discharge sequence number #114816
如图9所示,在EAST #114832次放电过程中采集的第9帧4、5、6通道谱线图。图中标注序号a、c、e处在三张谱线图中均有出现且数值相似,可以确定为有效波峰;标注序号b、d处在前后位置有出现,但数值不同,可以确定为被噪声干扰的有效波峰;其余若干波峰经过前后位置的对比,可以确定是由噪声干扰引起的谱线波动。
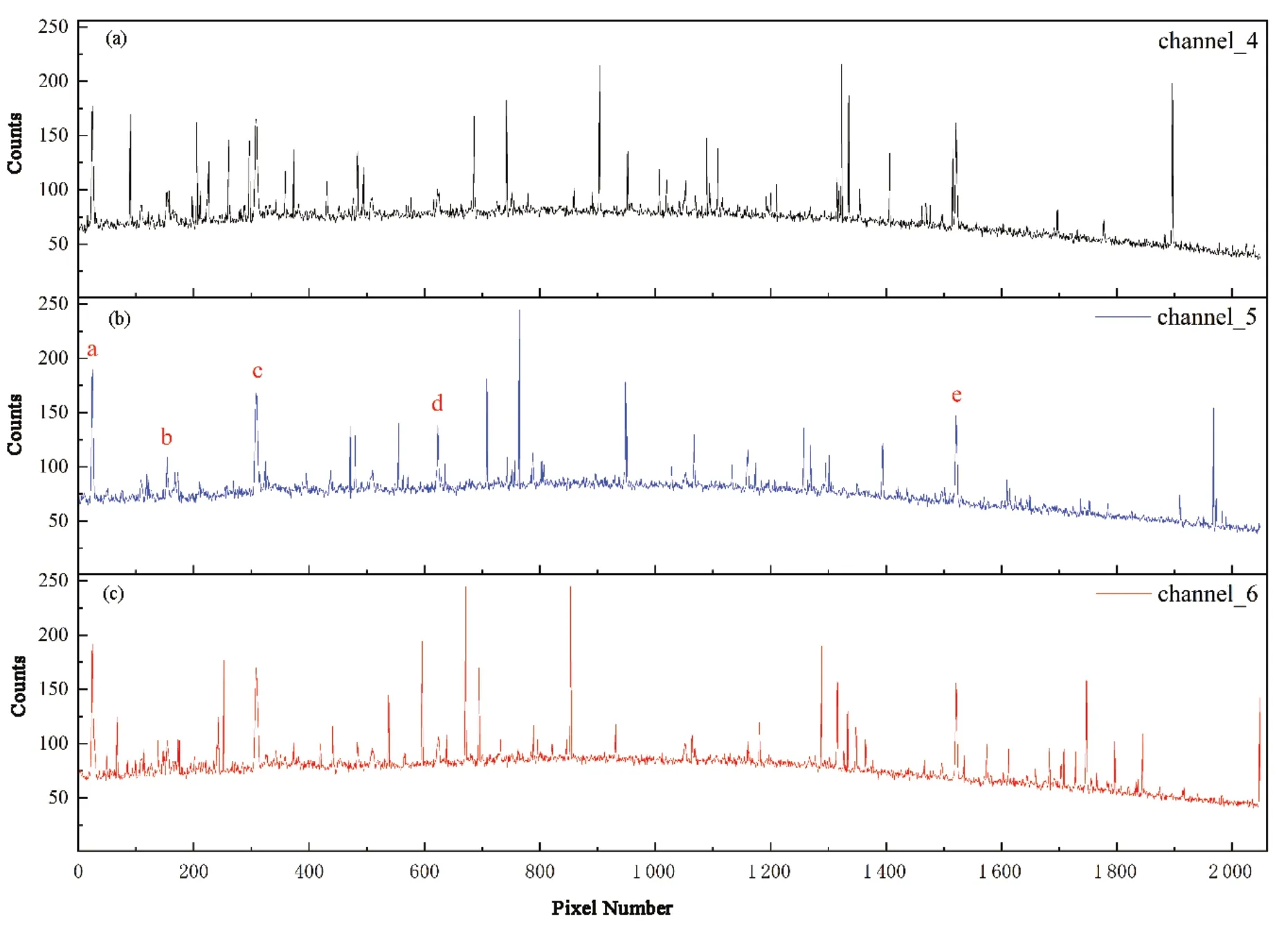
图9 放电炮号#114832第9帧4、5、6通道谱线图 (a) 第4通道,(b) 第5通道,(c) 第6通道Fig.9 Spectra diagram of channel 4, 5 and 6 in frame 9 of discharge sequence number#114832(a) Channel 4, (b) Channel 5, (c) Channel 6
图10为放电炮号#114832第9帧5通道谱线处理前后对比图。经过观察可以发现,序号a、c处在处理后有效数据得到完美保留;序号b、d处光谱强度降低,且降低后数值接近预估真实值;序号e处有效波峰受到影响,强度遭到削弱;序号f处数据鉴别为噪声,BMP图像处理系统检测出异常,仍有部分噪声未完全去除;其余未标注的噪声部分基本达到预期处理效果。
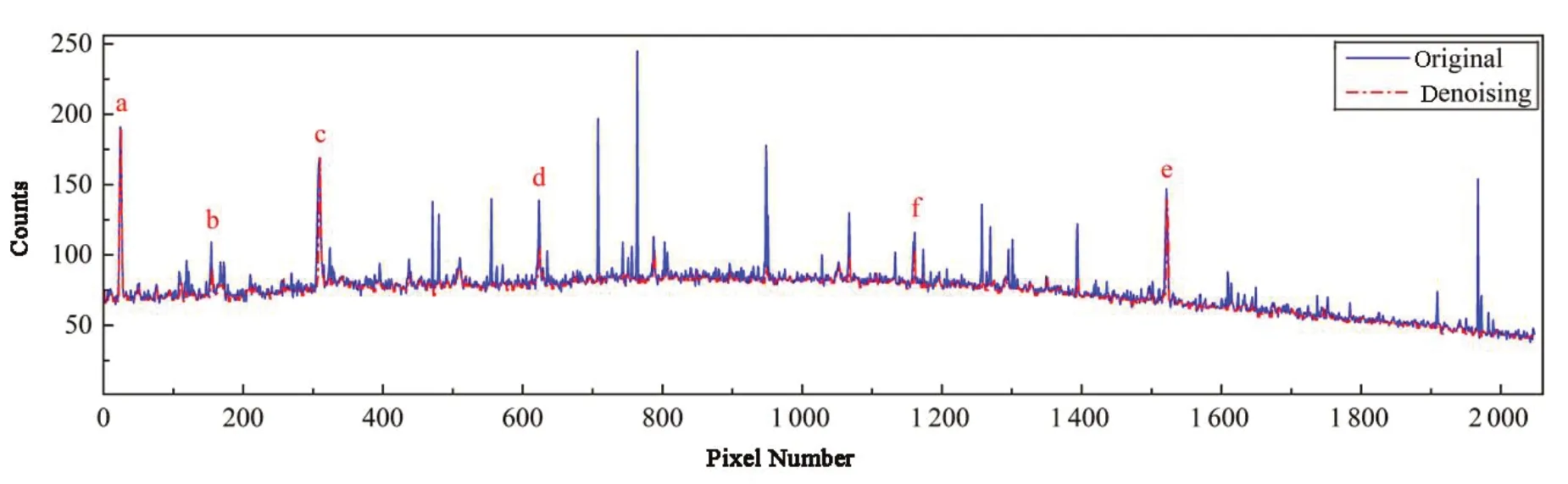
图10 放电炮号#114832第9帧5通道谱线处理前后对比图Fig.10 Comparison of spectra of channel 5 before and after processing in frame 9 of discharge sequence number #114832
为了进一步检验该系统的去噪能力,在无噪声影响的EUV光谱图像中添加随机噪声来测试系统去噪效果。根据噪声特性,通过Matlab在光谱图像的每个通道加入25个噪声,一幅图像20个通道共计500个噪声。图11展示了两次分别进行加噪处理后的原始光谱、加噪光谱及处理后光谱对比图,其中图注signal w/ noise_1、denoising_1、 signal w/ noise_2、denoising_2、original分别表示第一幅加噪光谱、第一幅处理后光谱、第二幅加噪光谱、第二幅处理后光谱、原始光谱。经观察在序号a处有未处理完全噪声,查阅该位置数据发现在该处位置生成了3位宽噪声,导致处理系统未能将其识别。系统共对两幅图像中1 000处添加噪声进行处理,经统计,去噪率达到98.2%,且谱线未出现失真情况。
5 结语
针对EAST托卡马克装置上EUV光谱诊断系统所采集的光谱图像存在硬X射线噪声干扰的问题,本文讨论了将改进后的限幅滤波算法用于EUV光谱去噪的可行性,并以改进后算法为基础设计了EUV光谱图像处理系统。该系统通过改进型限幅滤波算法对输入的光谱数据进行分阶段操作,第一阶段检测大幅值噪声可能存在的位置并进行处理;第二阶段只检测中小幅值噪声而不检测大幅值的数据波动。实验结果表明,该EUV光谱图像处理系统能有效解决EAST托卡马克装置上EUV光谱诊断系统数据采集中硬X射线产生的干扰问题,提高了实验数据的可观测性。同时该系统基于FPGA进行设计,对输入图像实施并行流水线的方式进行处理,充分发挥了FPGA速度快的优势,处理一幅2 048×2 048 pixels大小的图片仅需42 ms,保证了处理系统的实时性。此外,基于FPGA开发的系统兼顾体积小、稳定性高、兼容性强且易于移植的优势,下一步将在磁约束聚变等离子体杂质光谱去噪领域开展更广泛的应用。
作者贡献声明孙波负责设计并实现该系统,分析实验数据,完成初稿的撰写;刘冲、吕波、尹相辉、符佳、王福地提出文章写作思路,并对文章进行总体审查及修改;张洪明、林子超提出系统设计思路,提供EUV相关的技术指导;沈永才、计华建负责协助开展实验,提供必要的设备支持;胡奎、范玉、毛立宇、曾超协助完成系统设计,给出相关算法的改进意见。
猜你喜欢
系统工程与电子技术(2021年8期)2021-07-27 08:39:18
电子制作(2018年18期)2018-11-14 01:48:20
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
物理化学学报(2015年7期)2015-12-30 12:13:18
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
河南科技(2014年1期)2014-02-27 14:04:06
电子设计工程(2014年20期)2014-02-27 12:01:00
测绘科学与工程(2013年4期)2013-03-11 15:07:41
