
刚性扑动仿生蝠鲼鱼的设计*
2024-03-05 12:13:52朱红萍苏世杰
机械制造 2024年1期
朱红萍 曾 鑫 苏世杰
1.沙洲职业工学院 智能制造学院 江苏苏州 215600
2.江苏科技大学 机械工程学院 江苏镇江 212100
1 设计背景
近年来,以鱼类为仿生对象,设计高效的水下推进装置成为国内外高校机器人领域研究的热点。鱼类推进模式主要有身体/尾鳍推进模式和中央鳍/对鳍推进模式两种。其中,中央鳍/对鳍推进模式依靠中间互相对称的对鳍进行推进。
国内外专家学者一直致力于对仿生机器鱼的研究工作。1994年,美国麻省理工学院研制出世界上第一条仿生鱼,整个仿生鱼身由六台电机驱动,实现摇摆身体和尾鳍游动。20世纪末,日本东海大学研发出采用胸鳍推进法推进的仿生机器鱼,后来经过技术升级,于2000年研制成功一种机器鱼,通过电机驱动两侧的胸鳍,实现倒向游动及原地悬停。世界上第一条通过刚性胸鳍摆动的仿生机器鱼由 Kato等[1]在 2004 年研制成功,这条机器鱼的胸鳍面用一层薄膜覆盖,内部通过四连杆机构驱动。
在国内,哈尔滨工程大学采用蓝鳍金枪鱼为仿生对象,在2002年成功研制仿生机器鱼,通过伺服电机驱动胸鳍和尾鳍共同摆动,实现推进。北航机器人研究所从 2005 年开始对胸鳍摆动推进的仿生机器鱼进行研发,先后完成三代样机的研制和测试工作。2010年,哈尔滨工业大学王扬威等[2]应用形状记忆合金研制了一款胸鳍推进的仿生机器鱼。这种仿生机器鱼与传统水下电机驱动的机器鱼相比具有更高的稳定性,并且几乎不存在噪声[3]。2016年,兰州交通大学李宗刚等[4]以箱鲀为原型,设计了一种依靠胸鳍摆动推进的机器鱼。这一机器鱼只有两个自由度,主要是研究它的转弯特性,设计比较新颖。
目前,国内外学者对仿生机器鱼运动的研究主要涉及胸鳍、尾鳍刚柔共融、柔性波动。此类仿生机器鱼通常体积较大,结构复杂,且产生的推力不大。而对蝠鲼鱼胸鳍刚性扑动的研究则不多,且不够深入。笔者对仿生蝠鲼鱼胸鳍刚性摆动机理进行研究,通过水动力学仿真试验确定最佳扑动参数,设计出仿生鱼体结构及其控制系统,实现定点游动的目的。
2 仿生蝠鲼鱼水动力学分析
为了能准确模拟仿生蝠鲼鱼胸鳍在水中运动的真实情况,分析得出影响胸鳍摆动效能的主要参数,需要建立胸鳍模型,并进行水动力学分析。
2.1 胸鳍运动几何模型
蝠鲼鱼前进的动力主要来源于胸鳍的摆动。蝠鲼鱼胸鳍摆动过程中,身体的主体部分为刚性转动,存在柔性运动的部分主要是胸鳍。不考虑胸鳍面的柔性变形,刚性胸鳍的运动主要有前后方向划动、上下方向拍动、转动三个基本运动。胸鳍摆动推进主要依靠宽大的胸鳍在摆动过程中受到的水的阻力,使鱼体受到与水阻力相反的推进力而实现。蝠鲼鱼胸鳍推力如图1所示,θ与θ′分别为胸鳍摆动时两个不同时刻的振动幅值,F与F′分别为胸鳍摆动时两个不同时刻产生的推进力。
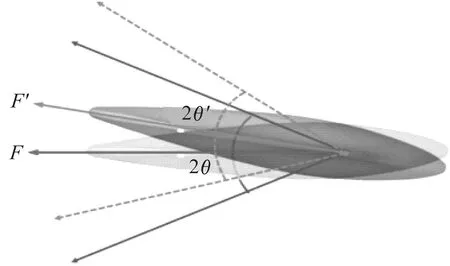
图1 蝠鲼胸鳍推力
为了分析胸鳍摆动规律,先建立胸鳍的几何模型。仿生蝠鲼鱼胸鳍横截面三维模型采用NACA0012翼型结构,并按照文献[5]观测到的胸鳍比例,对仿生蝠鲼鱼的单侧胸鳍进行建模。建立相应坐标系O-XYZ,胸鳍弦长方向为X轴,展长方向为Y轴,垂直于胸鳍面的方向为Z轴。胸鳍的弦长c取200 mm,展长s取180 mm。仿生蝠鲼鱼胸鳍物理模型如图2所示。
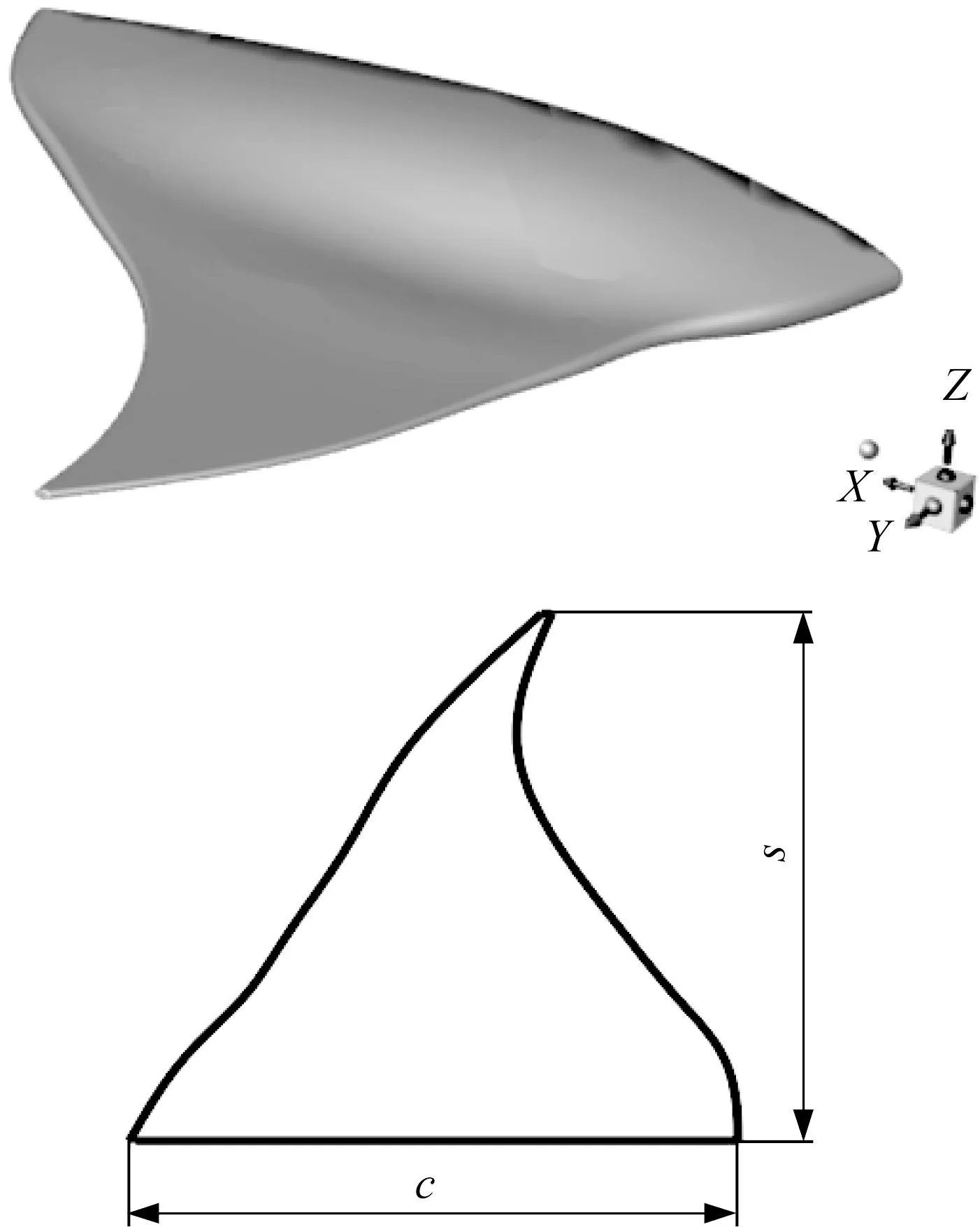
图2 仿生蝠鲼鱼胸鳍物理模型
Anderson等[6]在研究中,通过垂荡与旋转运动的组合,模拟低波数情况下的胸鳍运动。此类简化无论在仿真或是实体机器鱼的运动控制时都较为简便,将胸鳍看作扑动的刚体。仿生蝠鲼鱼胸鳍模型上的波动和振荡实际上是通过变形得到的真实运动简化模型,胸鳍的连续部分存在扑动运动,具有不同的相位角和振幅。将刚性胸鳍的耦合线性垂荡运动和旋转运动定义为正弦函数[7-9],有:
θ(t)=θ0sin(2πft+φ)
(1)
h(t)=h0sin(2πft)
(2)
式中:θ(t)为旋转运动的实时输出角度;t为运动时间;θ0为旋转运动的最大角度;f为拍动频率;φ为垂荡运动和旋转运动之间的相位差;h(t)为垂荡运动的实时输出高度;h0为垂荡运动的最大高度。
2.2 胸鳍摆动水动力学计算式
推力因数用于描述物体所产生的推力,值越大,物体所产生的推力越大。在流体力学运动中,无量纲推力因数Ct可被定义为:
(3)
As=cs
(4)
式中:U为蝠鲼鱼的稳态游动速度;Ft为蝠鲼鱼受到的推力,方向与蝠鲼鱼前进方向一致;ρ为蝠鲼鱼所处环境的液体密度;As为胸鳍Z方向的投影面积。
对于仿生蝠鲼鱼而言,仿生胸鳍摆动时受到的水动力是运动的主要动力。胸鳍模式下的前进和转向动作均可通过调整仿生胸鳍的摆动状态来实现。为了能更好地研究胸鳍摆动时的水动力学性能,设计以X方向的推力因数为评价指标。
借助XFlow仿真软件,以刚性胸鳍原地扑动的方式进行仿真,通过改变胸鳍摇拍翼幅值和频率,设计各组试验。
2.3 胸鳍仿真环境
参考实验室风洞试验,在XFlow 软件中采用虚拟风洞的三维外流场域类型。考虑模型在仿真风洞试验中的阻塞问题,当风洞试验的阻塞比低于5%时,不需要对模型阻塞效应干扰产生的误差进行修正[10]。设计流体域尺寸为 3.6 m×2.4 m×2.4 m,流体域及胸鳍模型如图3所示。

图3 流体域及胸鳍模型
设置胸鳍扑动频率、扑动角度幅值,仿真时间周期为5 s,帧频率为 50 Hz,总帧数为250。流体域中的流体设置为水,温度为288.15 K,密度为998.3 kg/m3,动力黏度为1×10-3Pa·s。
为得到胸鳍在稳态时的游动速度,可以依靠改变来流速度,使推进力为0,则此时加速度也为0,来流速度与仿生鱼稳态游动速度相等。
2.4 分析结果
笔者主要研究X方向的推力因数,将其用于评价胸鳍摆动时的水动力学性能,因此需要控制频率和幅值两个因素。根据文献[5]结果,胸鳍运动时推进力随着胸鳍扑动频率的提高而增大。1 Hz时,胸鳍的推进力最大。取胸鳍扑动幅值区间为22.5°~52.5°,均匀等分为五个水平,使用L25(52)正交表进行试验,设计25组试验。正交水平列举表见表1。
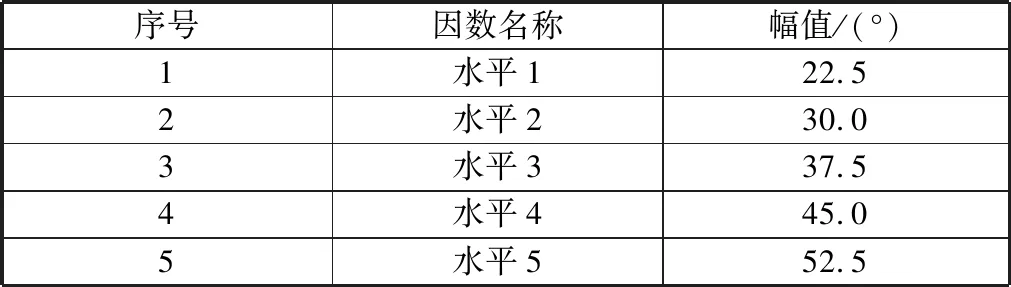
表1 正交水平列举表
正交试验数据见表2。
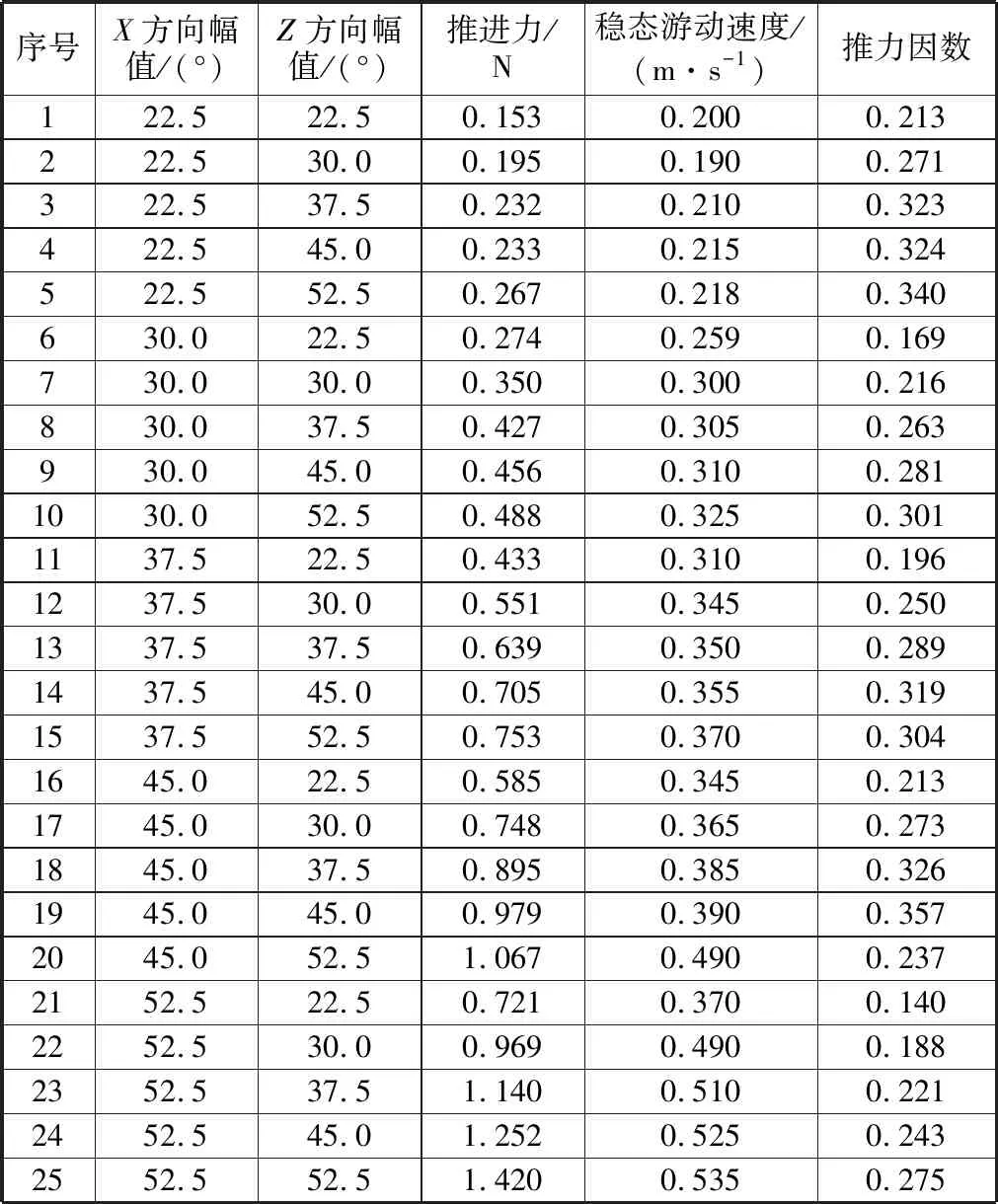
表2 正交试验数据
根据正交试验中的方差分析法进行数据处理,并分析比较数据[11]。
幅值趋势如图4所示。胸鳍在X方向运动,幅值在45°时为最优因数。胸鳍在Z方向运动,幅值在45°时为最优因数。因此,胸鳍的游动最佳组合为X方向45°、Z方向45°。推力因数分布如图5所示,验证了在最佳组合时的推力因数最大。
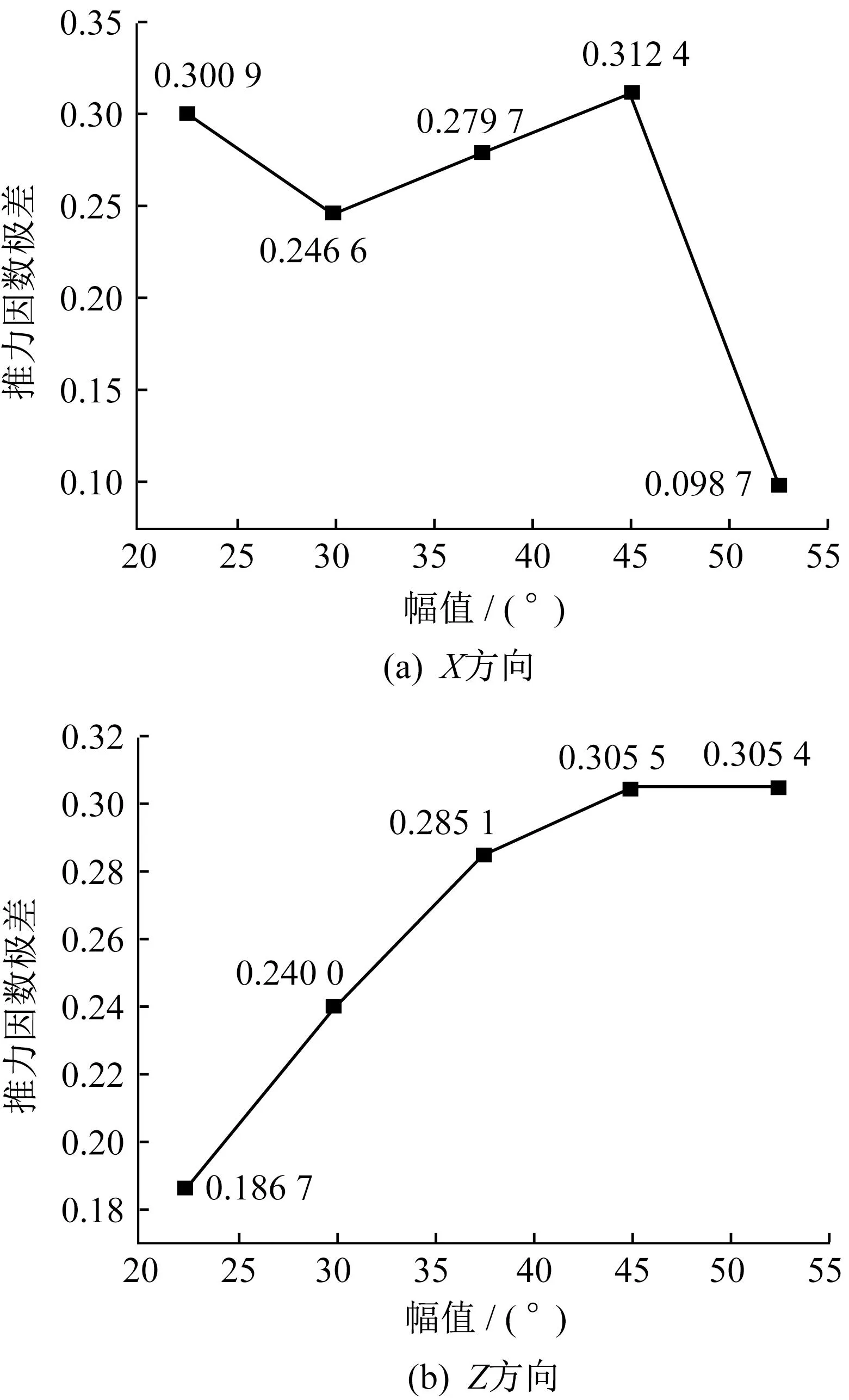
图4 幅值趋势
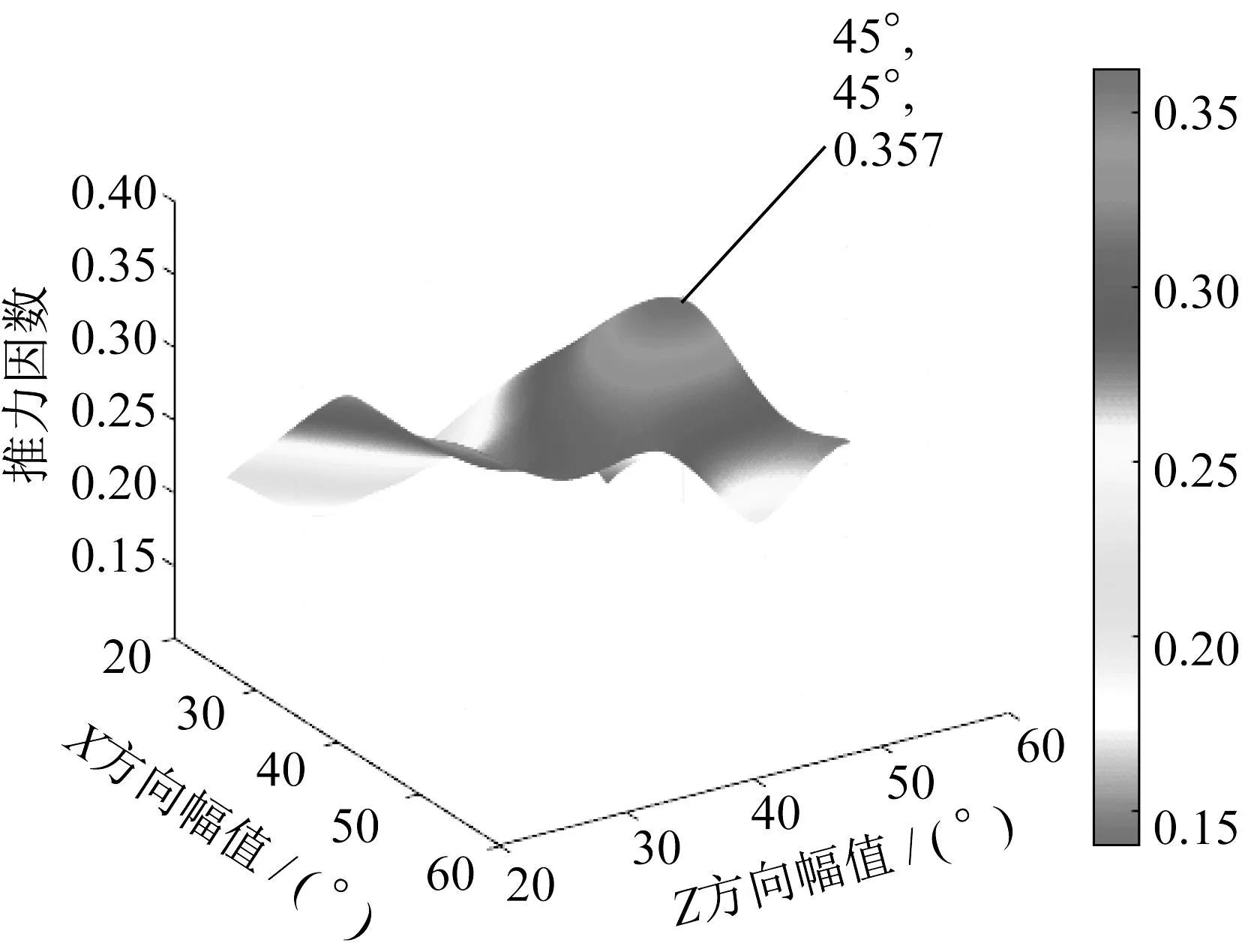
图5 推力因数分布
取最佳游动参数,胸鳍摇拍翼时,X方向幅值为45°,Z方向幅值为45°,对此进行仿真,得出胸鳍在一个周期内运动的压力,如图6所示。
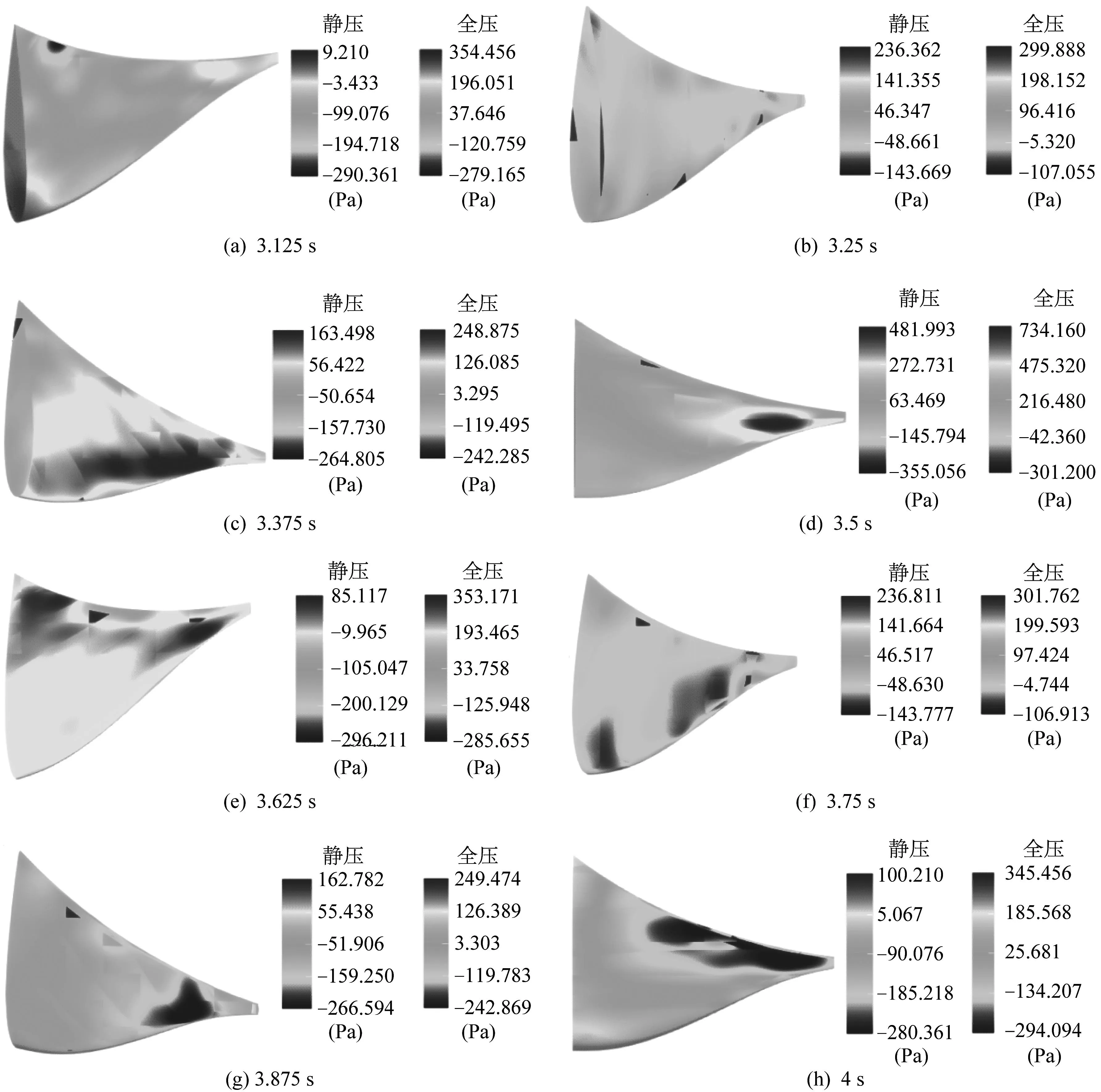
图6 胸鳍一个周期内运动压力
从3 s到4 s为一个周期。3.125 s到3.5 s时,胸鳍的前侧压力不断减小,后侧压力不断增大,3.5 s时总压力为734.160 Pa。在3.5 s到4 s时,胸鳍前侧压力不断增大,后侧压力不断减小。在运动过程中,胸鳍的前侧与后侧不断形成高压和低压中心,仿生蝠鲼鱼在胸鳍前侧与后侧的压力差作用下产生一定推力,向前运动。
胸鳍在一个周期内运动的X方向和Z方向扭矩如图7所示。在一个周期内,3.125 s到3.5 s时,胸鳍的压力和所需的X方向扭矩在不断增大,3.5 s时X方向最大扭矩大约为0.3 N·m。3.5 s到4 s时,胸鳍的压力和所需的X方向扭矩不断减小。
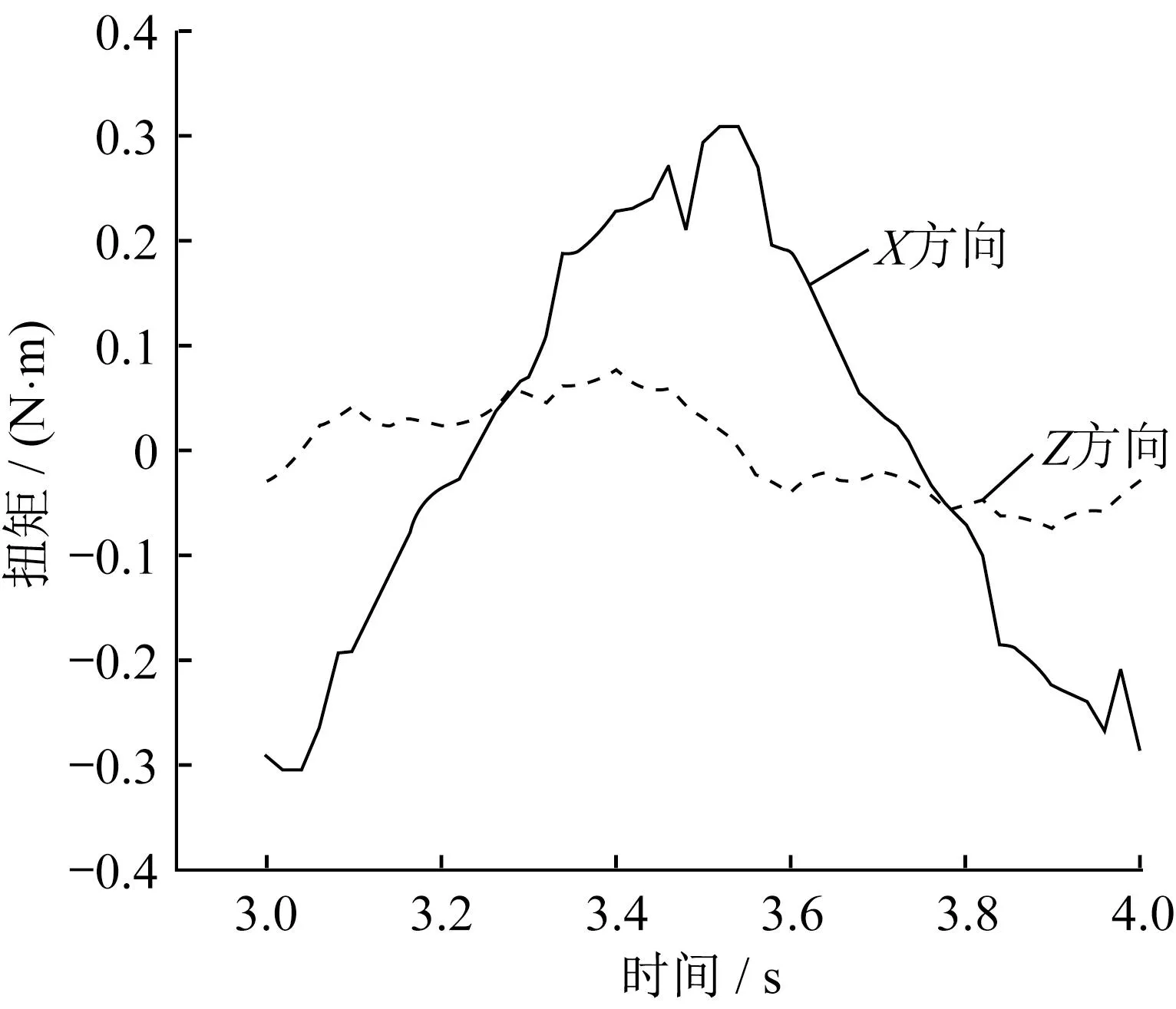
图7 胸鳍一个周期内运动扭矩
3 结构设计
笔者设计的仿生蝠鲼鱼工作深度范围设定在水下0~10 m,基体和胸鳍截面选取类翼型截面形状,取基体长约0.3 m,翼展约0.68 m,整个仿生蝠鲼鱼质量约为3 kg,胸鳍扑动幅值范围为15°~ 45°,扑动频率范围为0.2 ~1 Hz,续航时间为20~30 min[12-14]。所设计的仿生蝠鲼鱼三维结构主要由基体、过渡板、蒙皮、胸鳍等部分组成,如图8所示。
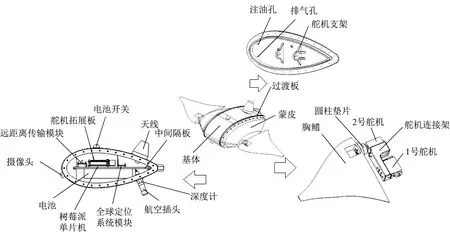
图8 仿生蝠鲼鱼三维结构
基体由光敏树脂材料经三维打印得到,用于装载控制系统所需的电子元器件。中间隔板将整个基体分为上下两部分,上半部分用于放置电器元件,下半部分用于放置电池与配重等。外部设有电池开关、摄像头、深度计、航空插头,远离头部一侧设置有深度计和全球定位系统模块。过渡板也由光敏树脂材料经三维打印而得。过渡板与基体间设有防水橡胶垫,防止水渗入基体破坏电子元器件,保证仿生蝠鲼鱼具有良好的防水性能。蒙皮是紧贴在左右两端胸鳍的圆柱垫片与过渡板处的硅胶材质结构,经模具压制凝固后脱模。蒙皮内部通过过渡板的注油孔进行注油操作,以达到平衡蒙皮浮力、减小配重的目的。仿生蝠鲼鱼的胸鳍采用光敏树脂经过三维打印成形,运动方式为刚性扑动。
1号舵机实现胸鳍的拍打运动,2号舵机实现胸鳍的旋转运动。
仿生蝠鲼鱼胸鳍的摆动由舵机驱动,需要选择合适的舵机向仿生蝠鲼鱼提供动力。对于舵机型号的选择,通过蝠鲼鱼胸鳍水动力学分析,结合最大推进力,确定仿生蝠鲼鱼舵机性能参数,以保证所选型号的舵机能正常驱动胸鳍摆动,产生合适的扭矩[15-17]。由动力学分析可知,X方向最大扭矩大约为0.3 N·m,总压力为734.160 Pa。仿生蝠鲼鱼所需的推力矩与摆动振幅正弦函数的二次方成正比,与摆动频率的二次方也成正比。其它参数是仿生蝠鲼鱼的固定参数,不会随运动改变而改变。仿生蝠鲼鱼的频率和摆动振幅对力矩的大小有决定性作用,进一步验证了仿真结果。
4 控制系统
根据仿生蝠鲼鱼胸鳍运动规律设计控制系统,硬件结构如图9所示。控制系统以树莓派单片机为下位机,全球定位系统模块、舵机、远距离无线传输模块、无线保真模块、摄像头等通过通用串行总线协议与树莓派单片机通信,陀螺仪与深度计通过集成电路总线协议与树莓派单片机通信。动力电池为树莓派单片机扩展板供电,远距离无线传输模块、全球定位系统模块、舵机、陀螺仪、深度计等与树莓派单片机扩展板上对应的针脚相连,完成通信和供电。摄像头与无线保真模块连接树莓派单片机通用串行总线接口,进行通信或供电。通过远距离无线传输模块和无线保真模块双通道与上位机通信,全球定位系统模块、陀螺仪、深度计等可获取经纬度、偏航角、深度等位置信息。摄像头可获取水下实时图像。

图9 控制系统硬件结构
四个总线舵机分别布置在仿生蝠鲼鱼两侧,通过树莓派单片机相关设置后,可控制各个舵机转动角度和频率,使仿生蝠鲼鱼实现静止、前进、转弯等动作。
选用JY901陀螺仪,方便确定仿生蝠鲼鱼当前运动的实时姿态及位置。MS5837 压力传感器用于探测水的深度,分辨率高达 2 mm。需要两个远距离无线传输模块实现通信,一个与上位机通过通用串行总线相连,另一个与树莓派单片机拓展板接口连接。
仿生蝠鲼鱼总体控制方案主要可实现以下控制功能:给定仿生蝠鲼鱼游动到达的目的位置;控制系统依据传感设备所采集的状态信息,计算出当前仿生蝠鲼鱼所处的实际位置,与给定的期望位置进行比较,计算得出目标偏差值,将此偏差值作为控制算法的输入值;由决策系统通过输入的信息进行自主决策,控制仿生蝠鲼鱼的舵机来执行相应动作,最终控制仿生鱼胸鳍完成扑动、旋转动作;循环检测实际位置与期望位置的偏差,实时判断是否到达目标位置,实现闭环控制。仿生蝠鲼鱼控制流程如图10所示。
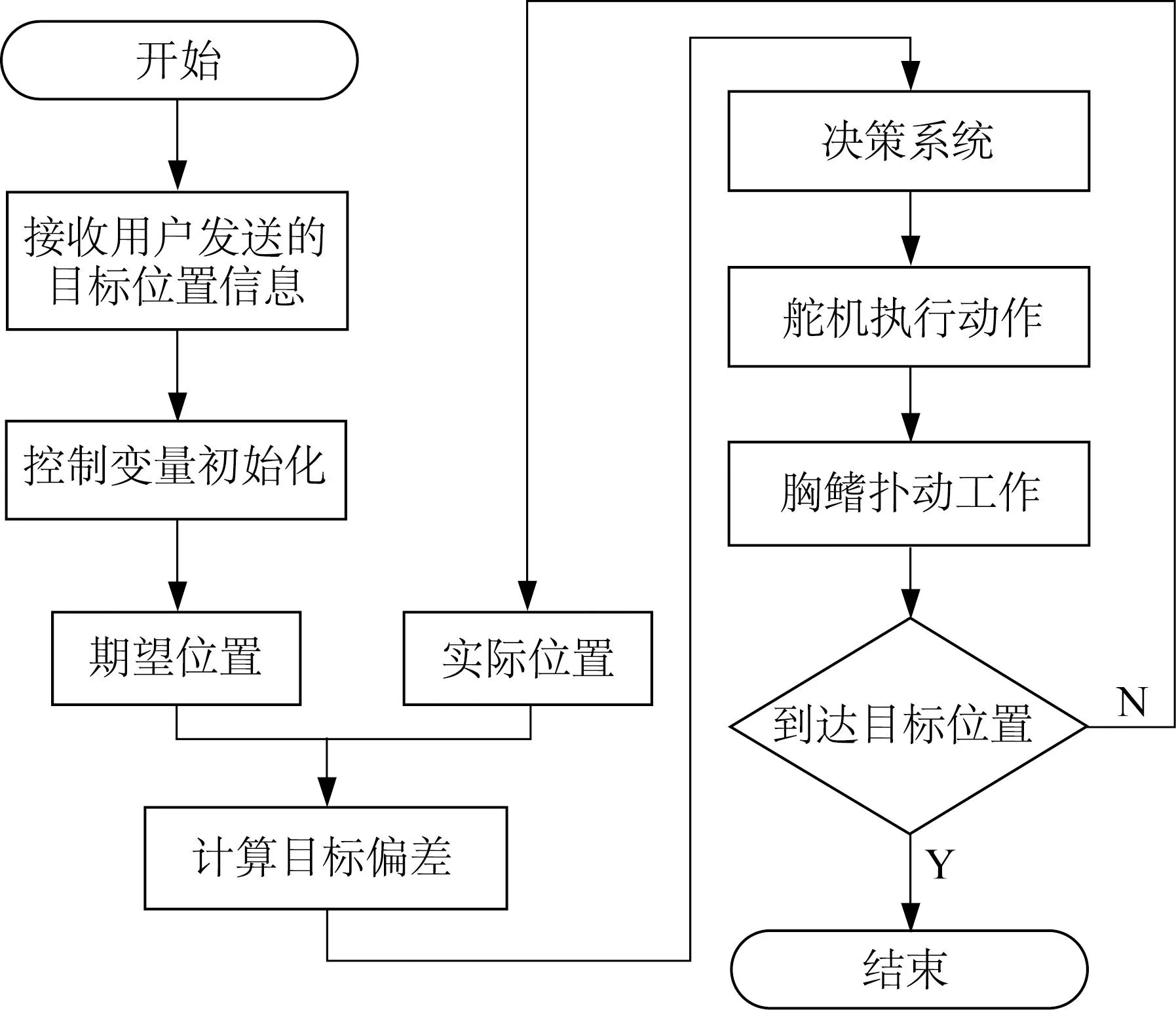
图10 仿生蝠鲼鱼控制流程
5 样机研制
为了验证仿生蝠鲼鱼的游动性能,检验能否完成设定功能,将组装后的仿生蝠鲼鱼置于水上进行原地调试,如图11所示,检验能否实现各种动作功能。进行系统测试,主要包括视频传输测试、传感设备读取测试、运动控制测试。通过无线保真模块进行视频传输测试,结果显示能较好实现上位机获取实时视频,如图12所示。
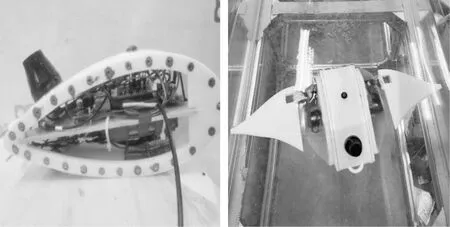
图11 仿生蝠鲼鱼水上原地调试

图12 仿生蝠鲼鱼视频传输测试
上位机软件读取仿生蝠鲼鱼的数据,包括陀螺仪数据、全球定位系统数据、当前运动状态、深度计数据,可以获取航向角、经纬度,以及当前速度、距离、深度等数据,进而准确获取仿生蝠鲼鱼的实时状态,能更好地下达控制指令。上位机软件运动控制可以实现手动控制和自动控制,手动控制可以控制前进、后退、转向、下潜、上浮、加速等,自动控制可以输入目标点坐标位置,然后自动游动至定位的目标点。上位机软件运动控制界面如图13所示。
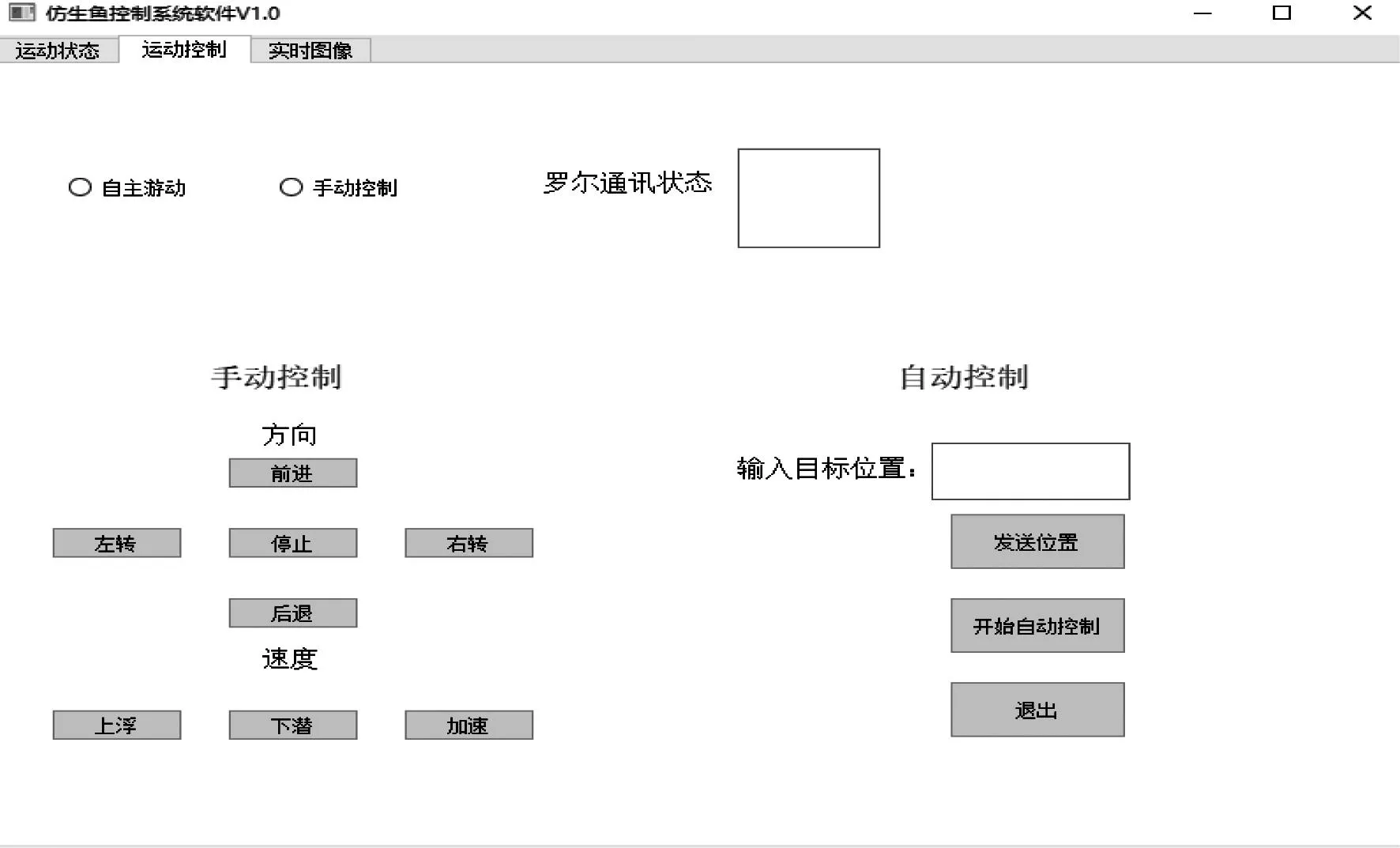
图13 上位机软件运动控制界面
经过现场调试,仿生蝠鲼鱼能很好地完成直游、左转、下潜、上浮等动作,如图14所示。
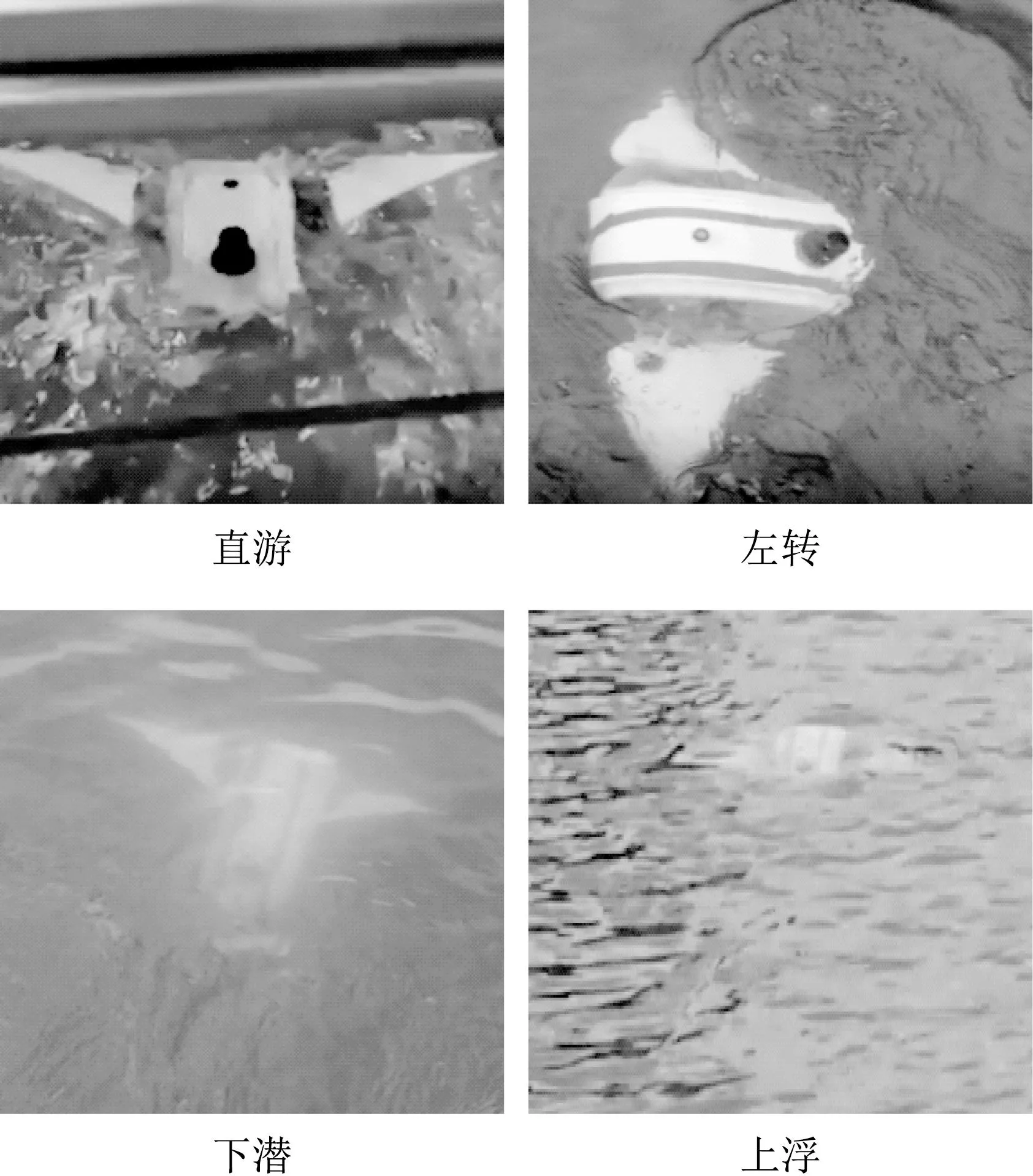
图14 仿生蝠鲼鱼现场调试
6 结束语
笔者研究了仿生蝠鲼鱼在中央鳍/对鳍推进模式下胸鳍刚性摆动时的水动力性能,通过仿真分析各组试验数据,得出仿生蝠鲼鱼最佳游动时的幅值、频率及所需的推进力。根据水动力分析得出的最大推进力,合理选择舵机型号,对仿生蝠鲼鱼整体结构进行设计,结合控制要求设计控制系统。对组装的仿生蝠鲼鱼样机进行现场调试,确认能较好实现预设功能。对刚性扑动仿生蝠鲼鱼进行设计,为后续进一步研制全柔性翼蝠鲼式仿生鱼,进行更加复杂的定点游动任务打下坚实基础。
猜你喜欢
水下无人系统学报(2024年1期)2024-03-14 03:42:28
少儿画王(3-6岁)(2023年4期)2023-06-28 11:01:55
机械设计与制造(2021年8期)2021-08-26 10:55:56
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
小学科学(2020年11期)2020-03-04 11:39:00
养生保健指南(2017年8期)2017-12-09 18:45:31
东方法学(2017年4期)2017-07-13 16:45:07
船舶力学(2017年5期)2017-06-05 14:14:11
科学Fans(2017年3期)2017-04-13 07:32:13
天津诗人(2014年4期)2014-11-14 19:05:52
