
光电稳定平台的设计与分析
2024-03-05 12:18:46姚建宁李红珊
机械制造 2024年1期
姚建宁 李红珊 徐 兵
1.天津航天中为数据系统科技有限公司 天津 300301
2.益诚真空技术(天津)有限公司 天津 300308
1 设计背景
随着信息技术和航空工业的快速发展,机载光电稳定平台凭借体积小、质量小、稳定度高等优点,广泛应用于巡检、航拍、测绘等领域,可以完成对目标物的定期跟踪、观测等相关作业[1]。光电稳定平台作为无人机的眼睛,对于完成侦察、定位、跟踪、校射等任务而言至关重要。在复杂的航空环境条件下,要保证载荷的成像质量,不仅要求无人机光电稳定平台框架结构具有足够的强度和刚度,而且要求具备优良的结构稳定性[2-3]。因此,光电稳定平台的结构稳定性对整个无人机侦察系统非常重要。
北方某林场为应对连年出现的火灾隐患,提出针对森林防火进行侦察和探测的无人机光电稳定平台研制需求。根据技术要求,在进行总体设计和整机有限元仿真后,完成了光电稳定平台的生产和调试。依据无人机功率谱密度,对光电稳定平台进行振动性能测试,包含功能性测试和稳定性测试。随后搭载在无人机上,完成挂载飞行测试,由此从多个角度来验证光电稳定平台的设计合理性。
2 光电稳定平台总体设计
光电稳定平台主要技术指标见表1。
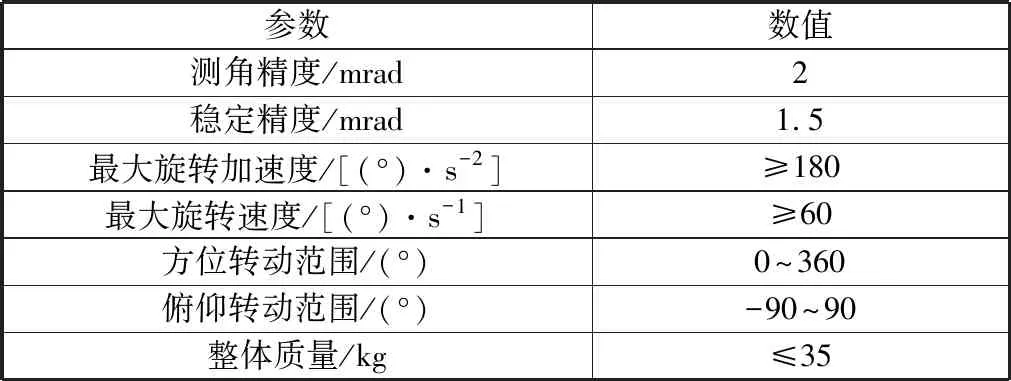
表1 光电稳定平台技术指标
根据研制要求,光电稳定平台同时搭载可见光相机、短波红外、中波红外、长波红外共四个载荷。采用传统两轴两框架结构形式,利用轴上测角器和俯仰框架内部的三自由度速率陀螺,对机体的振动和扰动进行实时信息检测与反馈。通过被动隔振系统和伺服控制主动隔振设计,有效隔离传递到光电稳定平台内框架载荷上的各种振动和干扰,使任务载荷在惯性空间内时刻保持视轴稳定,消除图像抖动,满足光电稳定平台的研制技术需求。
光电稳定平台包含方位支撑框架和俯仰运动框架部分。方位支撑框架由方位直驱力矩电机通过方位轴系驱动整个俯仰运动框架进行伺服运动,同时利用滑环实现方位框架内元器件与俯仰框架内载荷等的电气连接,保证方位转动组件360°连续旋转。俯仰运动框架由俯仰直驱力矩电机通过俯仰轴系驱动俯仰内框架上的四个光学载荷进行伺服运动,同时通过机械限位保证俯仰转动组件在-100°~100°之间转动,完全满足技术指标要求。方位测角器和俯仰测角器可以实时检测并回传两个框架的角度位置信息,俯仰内框架上的三自由度速率陀螺能够在恶劣的冲击和振动环境中提供高精度速率检测。光电稳定平台的总体设计如图1所示。
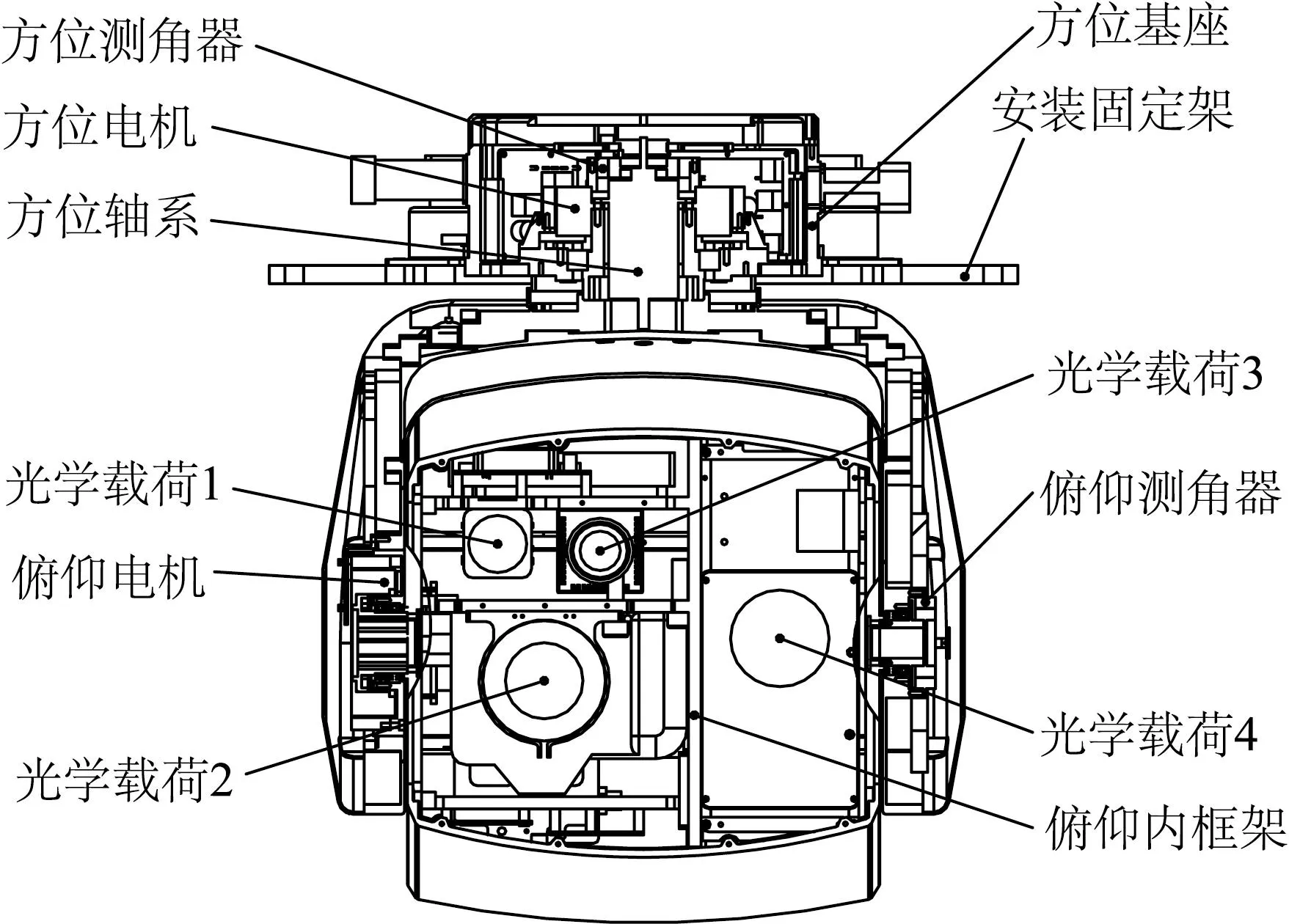
图1 光电稳定平台总体设计
3 有限元仿真分析
3.1 材料
无人机机体的持续振动会影响光电稳定平台的光学视轴稳定,由此对光电稳定平台结构强度提出更高的要求[4]。光电稳定平台在实际飞行作业时,需具备良好的动态性能和极高的稳定精度。为最大限度满足伺服控制的需求,在保证光电稳定平台质量和尺寸要求的前提下,需要尽量提高光电稳定平台的结构刚度和强度[5]。
为降低光电稳定平台的研制成本,缩短研制周期,采用有限元仿真软件对光电稳定平台进行仿真分析。材料以7075和2A12铝合金为主体,轴系等核心转动部件采用40Cr不锈钢材质,球壳等非承力部件采用丙烯腈-丁二烯-苯乙烯(ABS)材质,不同材料的性能属性见表2。在不影响有限元仿真精度的前提下,对光电稳定平台进行了模型处理,如对倒角和螺纹孔等进行了简化。对整机装配体完成网格划分,结构单元数为2 410 603,节点数为5 347 367,为静力学和模态仿真分析奠定了基础。
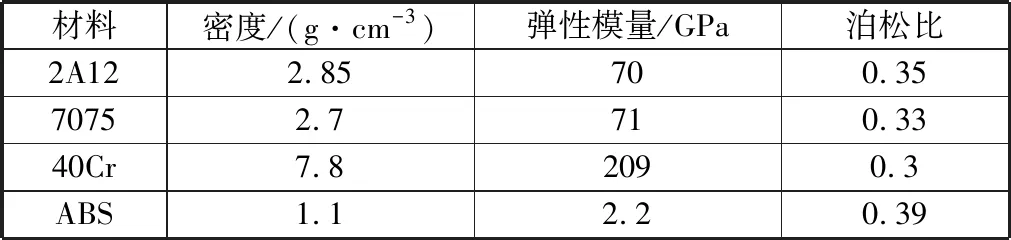
表2 材料性能属性
3.2 静力学分析
进行静力学分析的目的是检验光电稳定平台在重力、负载及飞行作业时惯性力矩等作用下,结构应力和应变是否在材料许用范围内[6]。通过获取光电稳定平台所挂载机体内部传感器数值,综合分析无人机通过自身一级减振后附加给所挂载光电稳定平台三个方向的加速度值不超过2.5g,g为重力加速度。因此在光电稳定平台三个方向分别施加2.5g加速度载荷,同时结合实际飞行工况及所受的风阻力、重力等因素,进行静力学分析。静力学分析结果如图2所示。
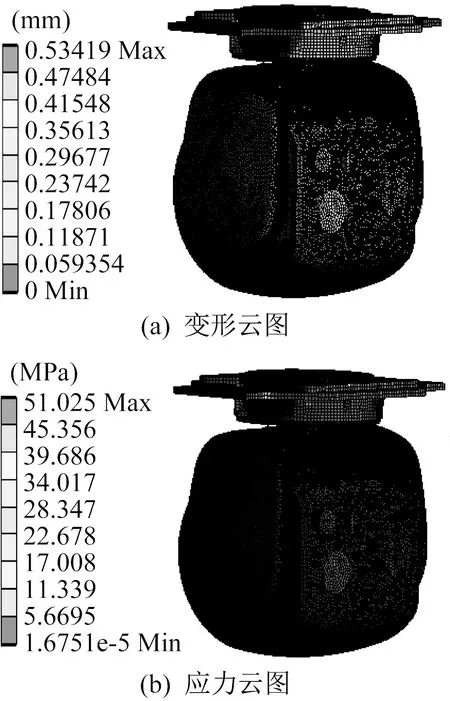
图2 静力学分析结果图
由静力学分析结果可知,光电稳定平台所受总体应力最大值为51 MPa,产生在基座挂载安装板部位;所受总体变形最大值为0.53 mm,产生在内框架转动部位最下端,符合实际工况。
应力最大处的基座挂载安装板采用7075铝合金板材加工而成,屈服强度为450 MPa,远大于所受总体应力最大值。最大变形为0.53 mm,对光电稳定平台的整机性能基本无影响。通过静力学分析,可知光电稳定平台结构设计合理,满足研制要求。
3.3 模态分析
模态是机械结构的固有振动特性,每一个模态都具有特定的固有频率、阻尼比和模态振型。模态分析是研究部件动力学特性的有效方法。无人机在飞行过程中,电机带动螺旋桨进行周期性旋转,进而将这种运动传递到光电稳定平台上。当光电稳定平台的固有频率和输入信号频率接近时,会引起光电稳定平台的振动扩大,进一步传递到载荷上,导致载荷视轴不稳,图像效果不佳,直接影响系统的动态特性[7-10]。
对光电稳定平台进行模态仿真分析,既可以有效增大刚重比,进而提高系统的伺服带宽与稳定性,又可以合理避免光电稳定平台自身与减振装置、挂载体等产生共振。利用与静力学分析同样的前处理模型和网格划分,对光电稳定平台进行模态分析,前四阶模态分析云图如图3所示,前六阶固有频率见表3。
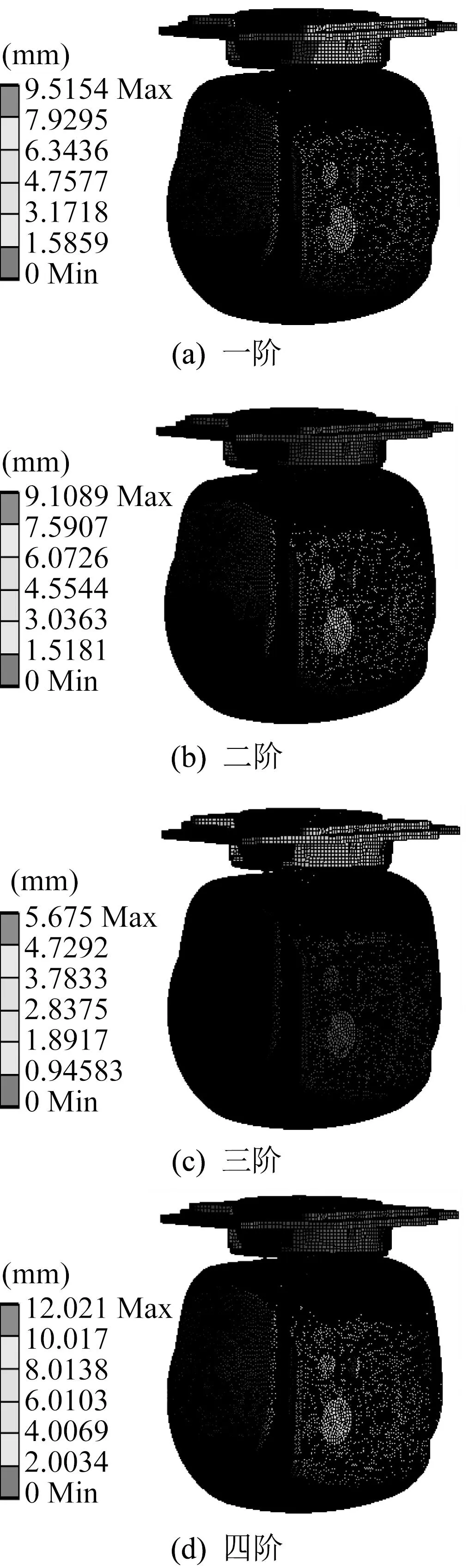
图3 模态分析云图

表3 前六阶固有频率 Hz
通过模态分析结果可见,光电稳定平台的基频为32.1 Hz,二阶频率为39.7 Hz。实际应用挂载的无人机主桨转速小于350 rad/min,二者相差较远。因此,光电稳定平台避开了所挂载无人机发动机和桨叶的固有频率,且高于无人机自身基频,大于光电稳定平台的伺服带宽。进一步与客户沟通确认,光电稳定平台与无人机上的其它设备均不会发生共振。模态分析结果表明,光电稳定平台设计合理,满足研制要求。
4 振动测试
在光电稳定平台完成总体设计和有限元仿真分析的基础上,完成实物的生产制造加工。经过系统装配、调试和测试后,对光电稳定平台进行振动测试。
研制的光电稳定平台尺寸和质量都较大,对其进行振动测试,需要研制一台基频远高于待测试设备前四阶固有频率的振动工装。否则由于工装自身基频太低,极易引起试验中待测试设备与振动工装产生共振,对设备产生损坏。为验证光电稳定平台的性能,特意研制了一台专用振动工装,并对专用振动工装进行扫频试验。
对光电稳定平台专用振动工装进行扫频试验,扫频频率从0至2 000 Hz。由扫频试验结果得到专用振动工装基频为438.8 Hz,能满足光电稳定平台振动测试的需求。
光电稳定平台利用无人机挂载飞行作业,将光电稳定平台安装于专用振动工装上,采用三点平均控制法,基于所挂载无人机的功率谱密度曲线,对光电稳定平台进行三个方向的振动测试。无人机功率谱密度曲线如图4所示,振动测试现场如图5所示,传感器测量点安装位置如图6所示。以竖直方向为例,振动测试控制曲线如图7所示,振动测试结果如图8所示。
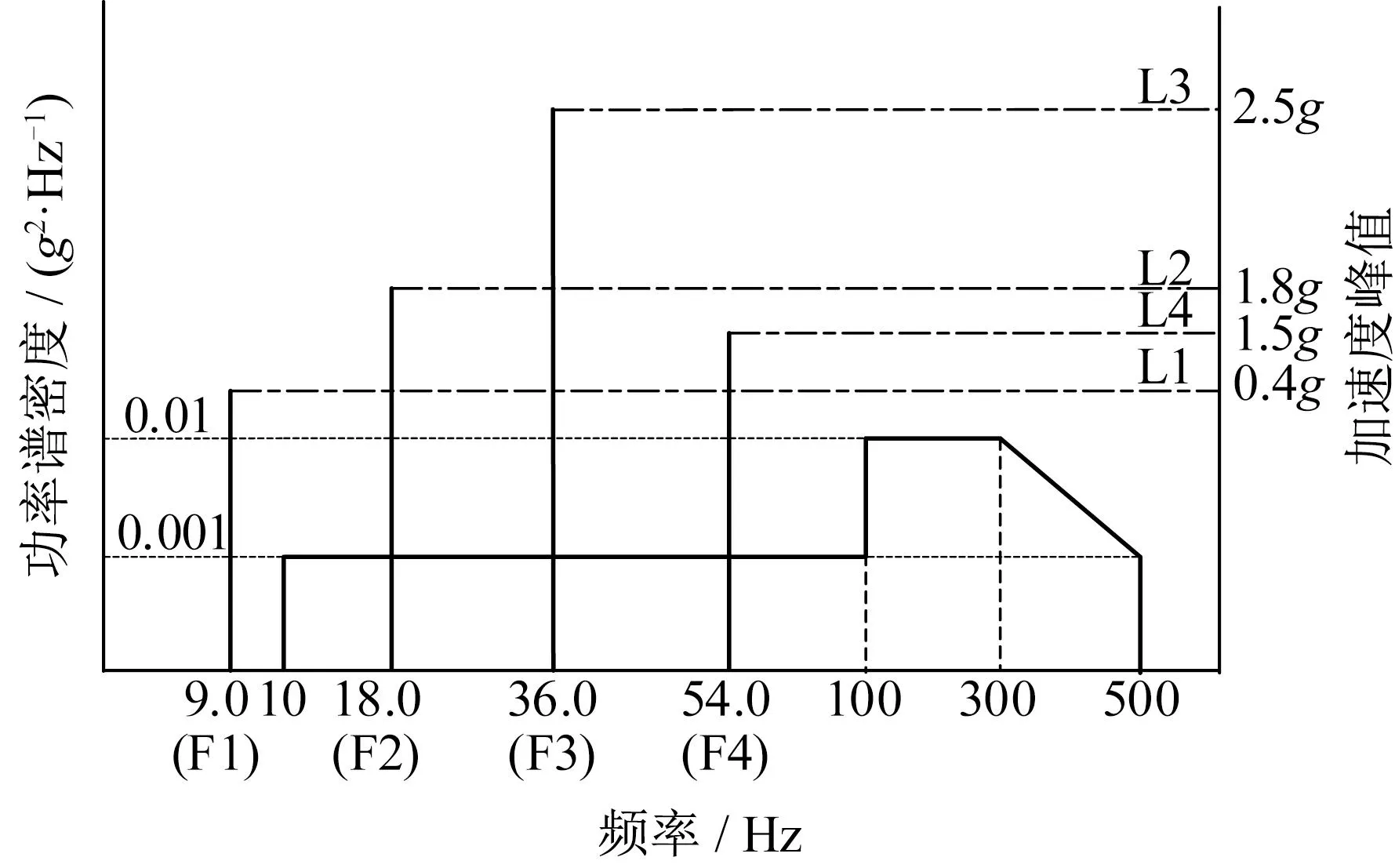
图4 无人机功率谱密度曲线

图5 光电稳定平台振动测试现场
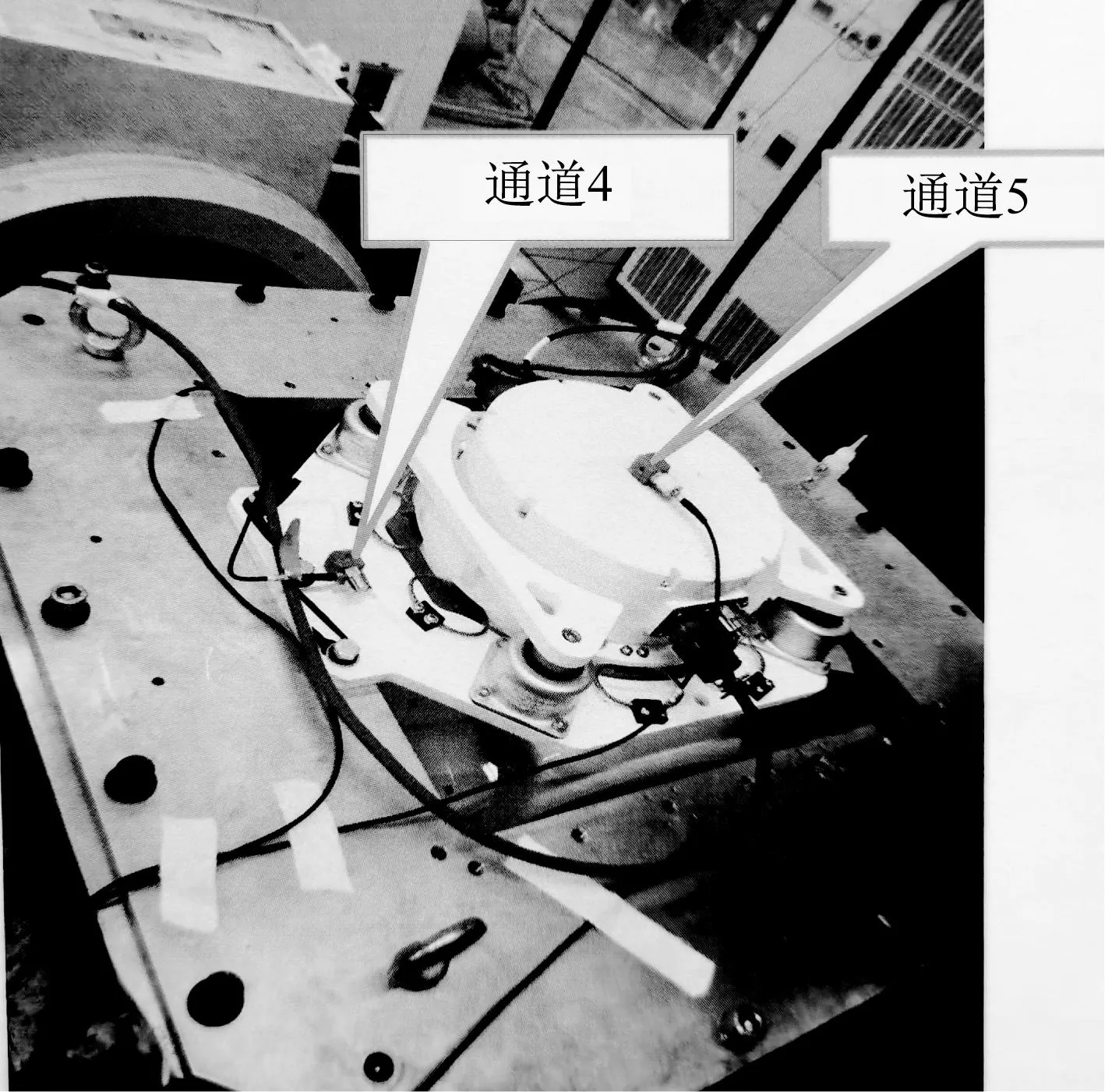
图6 传感器测量点安装位置
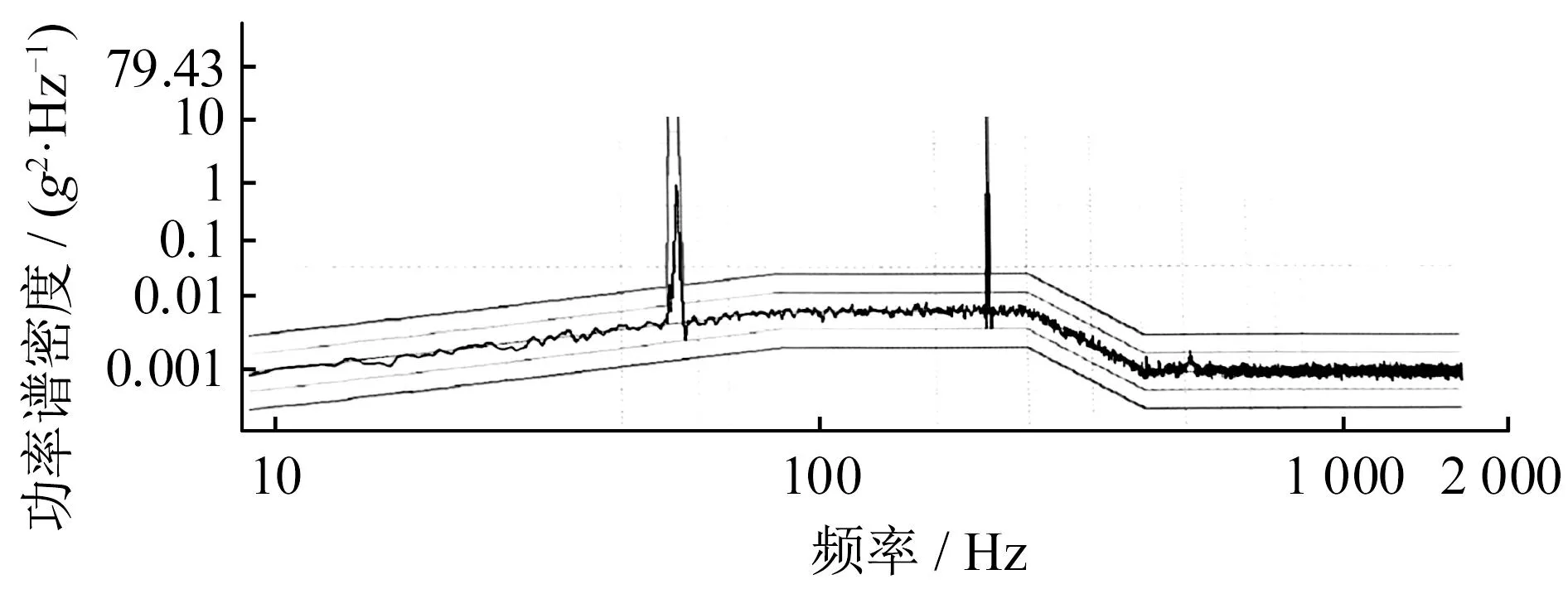
图7 振动测试控制曲线
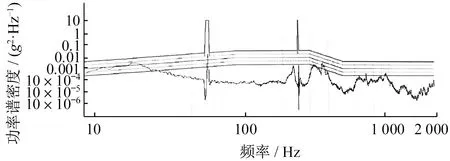
图8 振动测试结果
由振动测试结果可知,光电稳定平台在测试过程中各项功能工作正常,测试结束后无任何零部件脱落、异响和损坏,性能可靠。测试过程中,四个载荷工作正常,载荷视轴稳定性良好,载荷成像清晰,满足研制技术要求。在无人机机体主桨振动频率区间,光电稳定平台的振动量级符合振动测试控制驱动要求,性能良好。通过对光电稳定平台进行振动测试,验证了光电稳定平台设计的合理性和稳定性。
振动测试过程中,利用光电稳定平台的载荷高清相机进行现场稳定性测试。对安装于俯仰内框架上的高精度速率陀螺进行陀螺积分采样观测,采样结果如图9所示。由测量数据进行取均值计算,可知光电稳定平台的整机稳定精度约为1.2 mrad,稳定效果良好,满足设计要求。
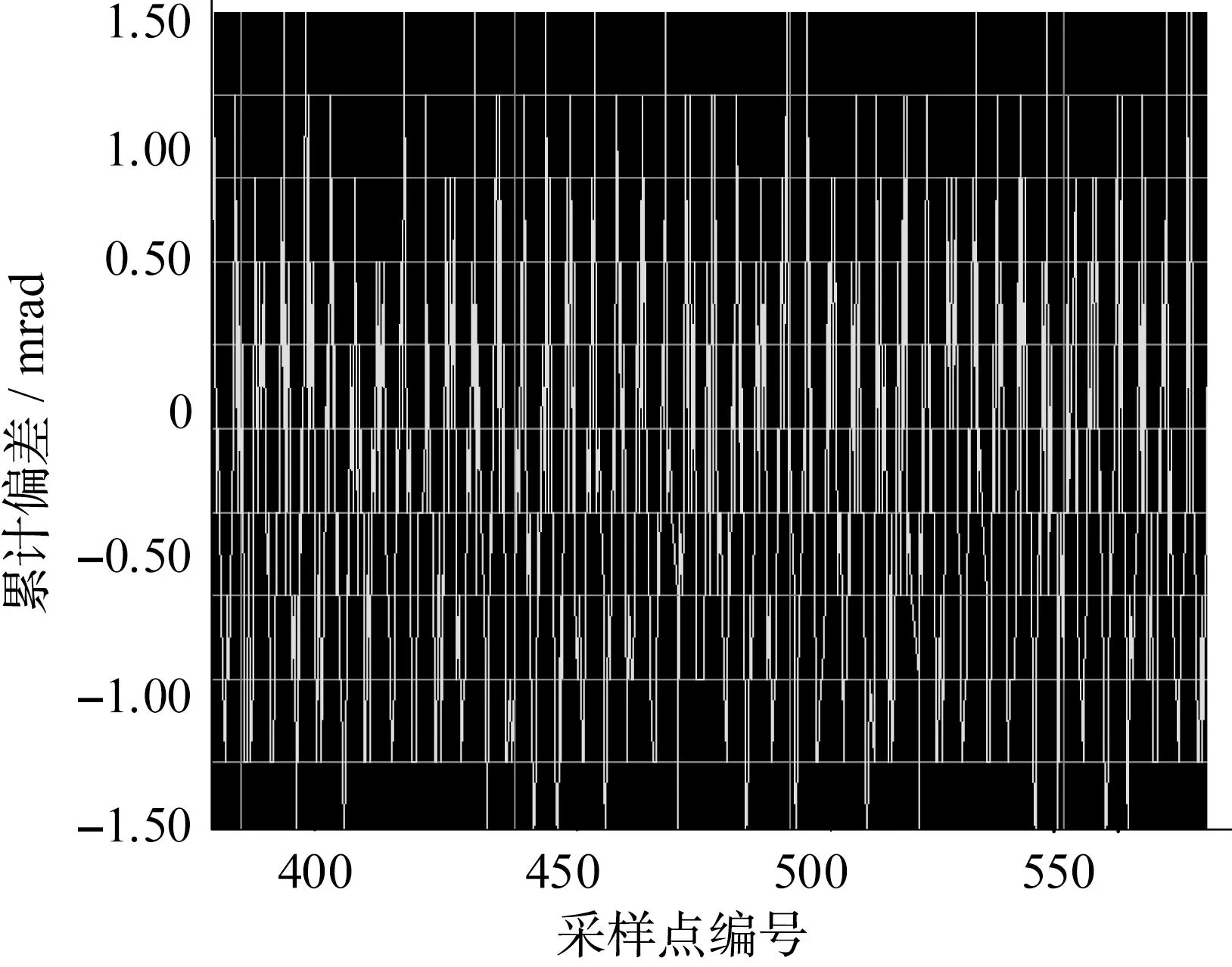
图9 陀螺采样结果
5 飞行试验
为了验证光电稳定平台的实际性能,在内蒙古某地利用配套无人机搭载光电稳定平台进行实际飞行试验。以某机场为中心,对沿途河流、林场等相关航点和火点进行定点观测[11-12]。无人机搭载光电稳定平台进行升空飞行试验,如图10所示。飞行过程中,通过地面端实时发送指令,进行间断性拍照。飞行过程中光电稳定平台多载荷回传数据如图11所示。通过对回传数据进行综合分析可知,光电稳定平台载荷拍照图像清晰,效果良好,满足应用需求。

图10 飞行试验
通过实际挂载飞行试验,有效证明了光电稳定平台的结构强度能满足应用要求,视轴稳定,回传图像清晰,效果极佳,充分验证了光电稳定平台满足研制技术要求。
6 结束语
针对某林场对火灾隐患的实际应用需求,设计了一种可同时搭载多载荷的光电稳定平台。
对光电稳定平台完成总体设计后,进行有限元静力学和模态仿真分析。
分析结果显示,满足研制要求。
在仿真的基础上进行实物加工制造和调试,依据无人机功率谱密度对光电稳定平台进行振动测试。振动测试结果表明,光电稳定平台各项功能良好,性能可靠,验证光电稳定平台设计的合理性。
进行实际的挂载飞行试验,通过载荷回传数据可知,光电稳定平台视轴稳定,回传图像数据清晰,进一步验证了光电稳定平台完全满足研制要求。
猜你喜欢
故事作文·低年级(2023年2期)2023-05-30 10:48:04
防爆电机(2020年6期)2020-12-14 07:17:06
航空兵器(2020年5期)2020-12-03 00:55:56
模具制造(2019年4期)2019-06-24 03:36:46
广西电力(2016年5期)2016-07-10 09:16:44
重庆邮电大学学报(自然科学版)(2016年3期)2016-07-04 06:27:14
Coco薇(2015年10期)2015-10-19 12:12:32
应用光学(2015年1期)2015-06-01 03:38:06
湖州师范学院学报(2015年4期)2015-03-11 16:39:45
警察技术(2015年6期)2015-02-27 15:38:24
