无信控交叉口电动自行车与机动车的冲突博弈研究
2024-03-03 01:02王维莉肖雨晴周辉张为四
交通运输系统工程与信息 2024年1期
王维莉,肖雨晴,周辉,张为四
(上海海事大学,物流研究中心,上海 201306)
0 引言
因操作简单、快速便捷及绿色环保等优势,电动自行车逐渐成为人们日常出行的重要工具。在城市道路交通系统中,电动自行车常与机动车同时共享通行权,两者对于道路通行权的争夺严重影响通行效率和行驶安全,电动自行车与机动车碰撞事故频繁发生。在不设交通信号灯管控的交叉口,因汇集机动车、非机动车及行人等多种出行群体,交通复杂度远高于其他路段,其中,转弯机动车是造成交通冲突的重要主体。尤其是右转机动车由于视野限制,与突然出现的电动自行车的冲突成为典型的交通管理难题。因此,构建合理的两车行为决策模型对城市道路安全管理具有重要意义。
为探究道路中不同主体的交通冲突问题,研究者们建立了不同的行为模型。LU等[1]将机器学习与路径分析相结合,通过对自行车与机动车的轨迹建模预测其冲突行为以及自行车的损伤程度。陈鹏等[2]提出一种基于云模型和粗糙集的无人行横道路段驾驶人避让决策分析方法。LI等[3]建立混合流元胞自动机模型探讨机动车与自行车交互时的非限制性优先让行行为。倪颖等[4]在考虑非机动车群组特征和右转机动车驾驶人动态多步决策特征的基础上,基于认知过程建立驾驶人环境感知-规划决策-控制执行的行为模型。但上述研究对交通主体的交互行为考虑不足。
博弈论常用来解释和模拟交通主体之间的交互作用。魏丽英等[5]建立人车冲突的演化博弈模型,深入分析不同交通情形下的均衡点及系统演化机理。ZHU等[6]基于行人与机动车在人行横道上的决策博弈模型,结合双变量有序Probit 方法评估行人闯红灯行为导致的人车碰撞冲突风险。周旦等[7]为探究公交站台区域行人与电动自行车发生冲突时的通行策略选择机制,建立演化博弈模型分析两类出行者的通行策略。LIU等[8]基于博弈论建立行为决策模型,探究驾驶人风险感知对车辆交互行为的影响。博弈论常基于完全理性行为假设,采用期望效用理论构建收益矩阵,预测结果往往与真实的决策行为有所偏离[9]。而基于认知心理学建立的前景理论,通过价值函数和权重函数表现主体在决策过程中对风险价值的主观感受,当前已用于多个交通领域,例如,出行决策[10]、分时定价[11]及换道决策[12]等。另外,有学者引入考虑时间价值的风险敏感系数探讨不同类型出行者的行为特征[13]。现有文献主要聚焦于机动车驾驶人在出行过程中的风险偏好及其行为特征,即日益复杂的道路环境逐渐分化出不同类型的交通主体。而外卖骑手和新手骑行人等不同类型的电动自行车骑行人在城市交通系统中的行为也会受到自身决策偏好和主观感知的影响,呈现出不同的骑行行为,同时,影响到与机动车之间冲突博弈的结果,相关问题仍缺乏深入研究。
鉴于此,本文考虑有限理性的交通主体,提出一种基于前景理论的电动自行车与机动车通行冲突演化博弈模型。首先,在考虑决策者心理感知的基础上,以各交通主体的损失最小为目标,根据决策者行为影响因素构建博弈模型;其次,运用复制动态方程求解模型,分析不同交通情景下各系统的稳定性及演化趋势;最后,运用前景理论研究主观心理因素和各损失成本对系统演化的影响,厘清道路使用者之间的交互行为与演化规律,为城市道路通行安全提供一定的参考价值。
1 模型构建
1.1 基本假设与冲突判别
城市无信控交叉口路段如图1(a)所示,电动自行车与同进口道右转机动车的行驶轨迹可能发生交集,如图1(b)所示,形成通行冲突。在构建模型前,对该交叉口做以下假设:
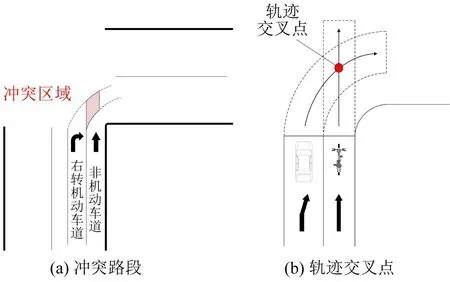
图1 城市无信控交叉口Fig.1 Diagram of an urban unsignalized intersection
(1)电动自行车骑行人和机动车驾驶人均表现为有限理性,且决策时,受到自身偏好和感知价值的影响;
(2)电动自行车和机动车均不产生换道或抢道行为;
(3)若发生交通事故,电动自行车骑行人受到的伤害将大于机动车驾驶人所受到的伤害[9]。
电动自行车骑行人和机动车驾驶人的策略集合均归纳为通行和让行,从而产生两种交通情景:①电动自行车和机动车均安全通过交叉口;②电动自行车与机动车之间存在交通冲突。本文中,交通冲突发生于电动自行车与机动车均选择通行决策时。
1.2 冲突行为分析
电动自行车骑行人与机动车驾驶人作为道路交通系统的有限理性主体,依据自身心理认知与风险偏好,重复“判断-调节-反馈”的动态过程,持续更新心理认知状况,不断调整决策行为,符合演化博弈中行为决策相互影响和行为人不断修正决策的适用条件。
设博弈参与主体集合为I={1,2},其中,各博弈主体i∈I,i=1,表示电动自行车骑行人;i=2,表示机动车驾驶人。电动自行车骑行人的行为策略集分别为{通行,让行},机动车驾驶人的行为策略集为{通行,让行}。设定各阶段电动自行车骑行人选择通行策略的概率为x,选择让行策略的概率为1-x;机动车驾驶人选择通行策略的概率为y,选择让行策略的概率为1-y。x和y均为时间t的函数。
由于电动自行车和机动车最终总能通过冲突区域,因此,双方均存在各自的收益,主要是由通过路段的基础收益和决策行为带来的损失两部分组成。本文定义电动自行车骑行人和机动车驾驶人的基础收益分别为E1和E2[5],当电动自行车骑行人和机动车驾驶人均决定通行时,双方分别形成冲突损失C1和C2(C1>C2)。此时,根据《中华人民共和国道路交通安全法实施条例》第五十二条第三项“机动车通过没有交通信号灯控制也没有交通警察指挥的交叉路口,转弯的机动车让直行的车辆先行”,机动车承担交通事故责任,形成违规损失L2。当电动自行车选择直行,机动车选择让行时,机动车形成等待损失W2;反之,当机动车决定通行右转,电动自行车让行时,电动自行车形成等待损失W1。当电动自行车和机动车均选择等待让行时,双方分别形成互让损失D1和D2。本文定义的相关参数如表1所示。
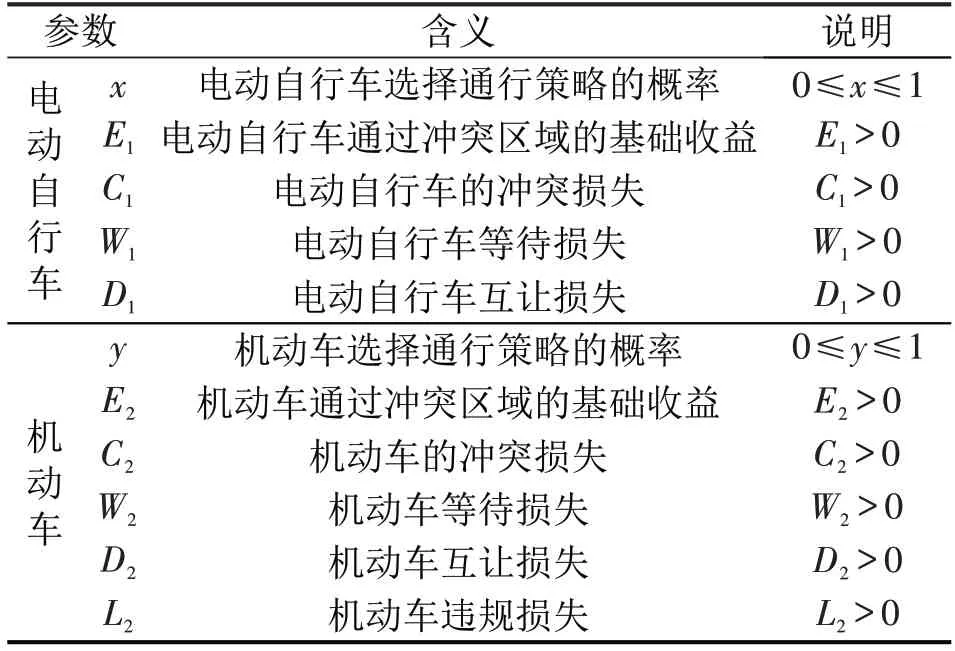
表1 参数定义Table 1 Parameter definition
根据上述假设得到电动自行车与机动车两者的策略组合和博弈收益矩阵,如表2所示。
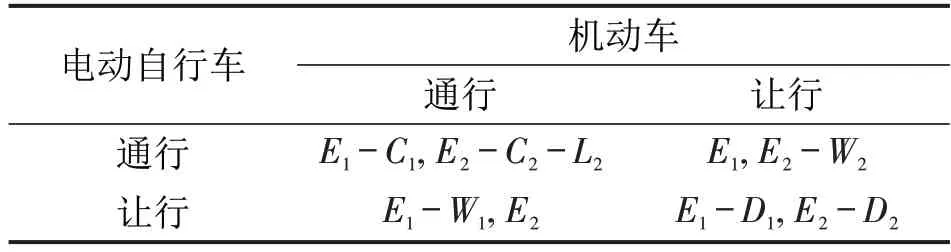
表2 电动自行车与机动车博弈收益矩阵Table 2 Profit matrix of game between electric bicycles and vehicles
1.3 演化博弈模型
传统演化博弈模型往往采用期望效用理论构建收益矩阵,忽略了决策者的心理感知和偏好,预测结果与真实的决策行为发生偏离。因此,本文以有限理性为前提,结合前景理论引入决策者主观感受修正演化博弈中客观支付矩阵的不足,更具有现实意义。根据前景理论,决策者对收益的感知价值V由价值函数v(xj)和权重函数ω(pj)组成,即
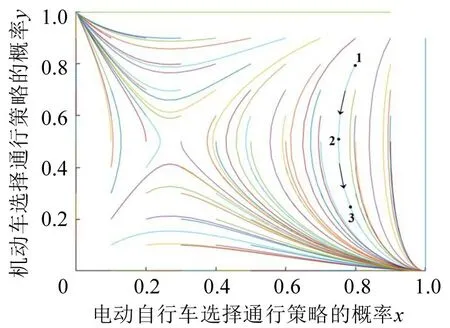
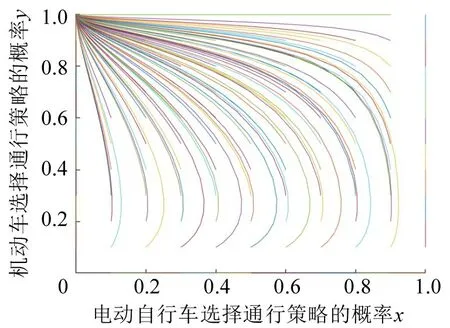
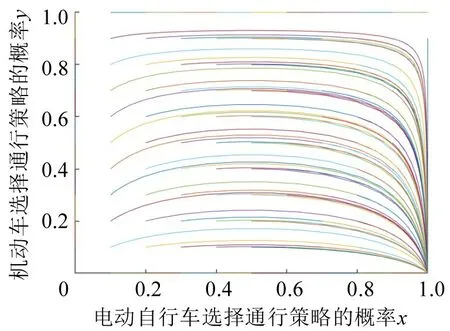
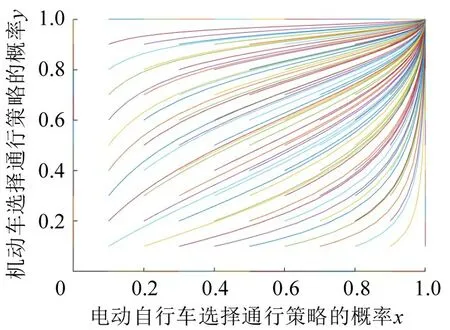
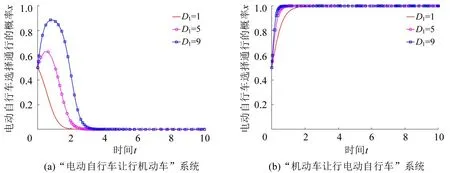
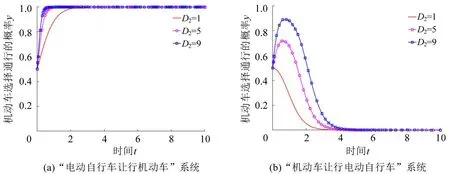
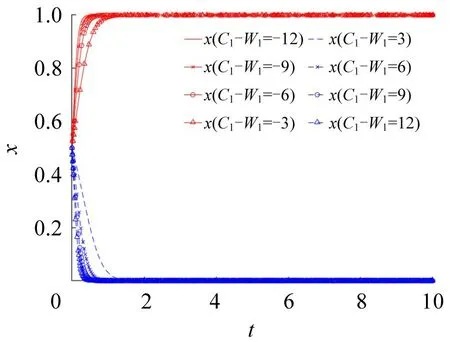
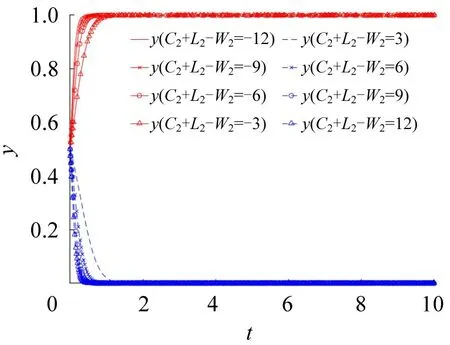
式(1)表示决策主体对某策略的感知价值等于策略中各结果的感知价值与对应主观概率的乘积之和,xj为博弈主体选择第j种策略的实际所得收益,pj为行为策略发生的概率。x0为参考点,当xj≥x0时,xj-x0表示博弈主体的相对收益;当xj 式中:α和β分别为决策主体对收益和损失的风险敏感度,值越大,表示对收益和损失的敏感程度越高,0<α<1,0<β<1;λ为决策的损失规避系数,通常设定λ>1,表示相比收益,决策者对损失更敏感。 权重函数ω(pj)具体表示为 式中:γ为决策影响系数,体现决策权重函数曲线的曲率,γ值越小,表示函数越弯曲。 本文将电动自行车与机动车的参考点分别设定为E1和E2。通过前景理论优化后,电动自行车选择通行策略的期望收益U11和选择让行策略的期望收益U12分别为 同理,机动车选择通行策略的期望收益U21和选择让行策略的期望收益U22分别为 因此,电动自行车在选择通行概率为x,选择让行概率为1-x时的混合策略期望收益为 机动车在选择通行概率为y,选择让行概率为1-y时的混合策略期望收益为 复制动力学机制是演化博弈分析的一种主要方法,反映博弈主体的策略更新过程,利用复制动态方程能够有效地对有限理性个体的演化行为进行分析和研究。根据博弈支付矩阵得出电动自行车骑行人和机动车驾驶人选择通行策略的复制动态方程为 在由电动自行车和机动车组成的二维动力系统中,令F(x,y)=0,G(x,y)=0,求得均衡点(0,0),(0,1),(1,0),(1,1),(x*,y*)。其中,(0,0),(0,1),(1,0),(1,1)为4组纯策略解,(x*,y*)为混合策略解。 在演化博弈中,由复制动态方程组求出的均衡点不一定是系统的演化稳定策略(Evolutionary Stable Strategy,ESS),因此,通过构建雅克比(Jacobian)矩阵分析局部均衡点的稳定性,当满足雅克比矩阵在均衡点的行列式detJ>0,且迹值trJ<0时,该均衡点为演化稳定策略。系统的雅克比矩阵为 通过计算得出雅克比矩阵的行列式和迹为 代入式(13)和式(14),得到5个局部均衡点所对应的雅克比矩阵的行列式和迹,如表3所示。 表3 不同均衡点对应雅克比矩阵的行列式和迹Table 3 Rank and trace of Jacobian matrix corresponding to different equilibrium points 由表3 可知,对于点(0,0),无论电动自行车和机动车的冲突损失、等待损失及互让损失如何取值,其雅克比行列式和迹恒为正,因此,(0,0)在任意场景中恒为不稳定点,即“电动自行车让行机动车,同时,机动车让行电动自行车”的情形不可能稳定存在。而对于其他均衡点,影响雅克比矩阵行列式和迹的正负性的因素主要为电动自行车和机动车博弈矩阵中的支付变量C1和W1的相对大小,C2+L2和W2的相对大小。在不影响问题本质的前提下,综合参考文献[14]与本文研究背景,设定β=0.88,λ=2.25,γ=0.69,探讨两组判别条件组合成的4种不同交通场景的均衡点稳定性。 (1)情景1C1>W1,C2+L2>W2 将5 个均衡点分别代入雅克比矩阵中计算可知,此时,系统有2个稳定点(0,1),(1,0)和1个中心点(x*,y*),即最终演化结果为“电动自行车让行,机动车通行”或者“电动自行车通行,机动车让行”。 对应现实交通场景,主要体现为电动自行车和机动车均距离轨迹交叉点较近。本文以(x,y)初始值(0.8,0.8)为例,探讨其演化路径。 初始,电动自行车与机动车的通行概率均较大,此时,于双方而言,冲突损失均大于等待损失,因此,两车将降低通行概率,减小冲突发生的可能性,形成图2 中“1 →2”的演化走势。到点(0.75,0.50)时,电动自行车作为两车博弈系统中的弱势方,若机动车强制通行导致冲突将承担事故责任,支付一定的违规损失,所以,机动车将继续保持通行率的降低。而根据相关法规,此时,电动自行车直行拥有优先通行权,再加上灵活快速的特性,电动自行车会提高自身通行概率。形成图2 中“2 →3”的演化走势,最终,收敛于稳定点(1,0)。 图2 情景1的x-y演化路径Fig.2 x-y evolutionary path of Case 1 (2)情景2C1>W1,C2+L2 将均衡点代入雅克比矩阵中以判定局部稳定性,通过计算得出此时演化博弈系统有1个稳定点(0,1)和2个鞍点(1,0)与(1,1),即系统最终演化结果为“电动自行车选择让行,机动车选择通行”。 对应的交通场景常见于电动自行车距离轨迹交叉点较远,机动车距离轨迹交叉点较近。此时,电动自行车距离较远导致其通过冲突区域需要较长的时间,若机动车选择礼让电动自行车,相比和电动自行车形成的冲突损失与违规损失之和,机动车的等待损失更高。而若电动自行车选择让行机动车,由于机动车距离路口较近从而通过时间较短,让行引起的等待损失与和机动车碰撞所带来的冲突损失相比要更低,因此,电动自行车更倾向于选择让行。 如图3所示,在满足C1>W1且C2+L2 图3 情景2的x-y演化路径Fig.3 x-y evolutionary path of Case 2 当电动自行车初始通行概率为x=1 时,若不发生“突变”,根据式(10),电动自行车通行策略选择无法向最佳策略x=0 演化,即电动自行车骑行人不知可以选择让行策略,因此,只能坚持选择x=1通行。此时,机动车的冲突损失与违规损失之和小于等待损失,通行策略会向其严格优势策略y=1演化,系统将会收敛于鞍点(1,1)。 同理,当初始机动车通行策略y=0 时,如果y没有任何突变,根据式(11),机动车通行策略无法向其最佳策略y=1 演化,即只能选择不通行。此时,电动自行车通行策略会向其严格优势策略x=0 演化,系统将会收敛于另一个鞍点(1,0)。 (3)情景3C1 计算每个均衡点的局部稳定性可知,此时,两车博弈系统有1 个稳定点(1,0)和2 个鞍点(0,1)与(1,1),即在实现“电动自行车选择通行,机动车选择让行”的策略组合时系统达到相对平衡状态。 对应的交通场景为电动自行车距离轨迹交叉点较近,机动车距离轨迹交叉点较远。因机动车离轨迹交叉点较远,导致电动自行车需要较长的等待时间,若电动自行车让行机动车,所引起的等待损失与其最初的冲突损失相比更高,因此,电动自行车倾向于通行。另一方面,此时,电动自行车距离潜在冲突点较近,给机动车带来的等待损失与两车冲突造成的冲突损失和违规损失之和相比更低,从而机动车会更倾向于让行。 下面分别取1组满足当前条件的值,做出不同初始值下(x,y)的演化路径,如图4 所示。除了x=0或y=1 两种情况外,对于任意初始值,博弈系统都会收敛于(1,0)。 图4 情景3的x-y演化路径Fig.4 x-y evolutionary path of Case 3 (4)情景4C1 通过代入雅克比矩阵计算判定局部稳定性可知,此时,系统有1 个稳定点(1,1)和2 个鞍点(0,1)与(1,0),即系统最终演化结果为“电动自行车与机动车均通行,发生冲突”。 对应的交通场景常见于电动自行车与机动车均距离潜在冲突点较远的路口。此时,于电动自行车而言,等待损失大于冲突损失,而从机动车的角度,等待损失也大于其冲突损失与违规损失之和,因此,(通行,通行)是两车博弈唯一的纳什均衡点。 在满足C1 图5 情景4的x-y演化路径Fig.5 x-y evolutionary path of Case 4 为了更加直观地展示博弈双方通行策略的选择变化,运用MATLAB进行演化博弈仿真分析,以揭示心理感知和各损失变量等因素对决策演化的影响机制。 λ是决策主体的损失规避系数,值越大,表示越厌恶风险,损失规避程度越高。在初始策略(x,y)=(0.5,0.5) 不变的情况下,固定,对λ分别取1.0、1.5、2.0 和2.5,如图6 所示,系统演化速度与损失规避系数成正比。即损失规避系数越高,选择稳定策略的演化过程越快。λ=1 时,博弈主体的策略演化趋势与λ取较大值时的策略演化趋势存在一定差异,因此,引入前景理论分析道路交通系统中的冲突博弈过程更符合实际情况。 图6 损失规避系数对演化路径影响Fig.6 Influence of loss avoidance coefficient on evolution path β表示决策者对损失的敏感程度,值越大,表示决策者感知价值的边际递减程度越大,即决策者对损失更加敏感。同样,不同的损失感知价值敏感系数β并不影响博弈系统的最终演化结果,而是影响策略演化的速度。如图7所示,随着β数值的增长,电动自行车和机动车形成通行策略的演化速度越快。与通行决策相比,博弈双方选择让行时受损失价值系数的波动影响更大,说明博弈主体的让行决策损失更大。当β=1 时,其策略演化趋势与β较小时的策略演化趋势存在一定差异,因此,引入前景理论更能反映博弈主体的风险态度变化。 在现实生活中,β的不同取值可代表不同类型的电动自行车骑行人。但因决策集合包括通行和让行(系统收敛于1 或0),在选择不同策略时,对应人群所反映出的风险偏好亦不同。结合外卖骑手和新手女骑行人两类不同风格的骑行人进行具体分析。在选择通行策略时,该情境下等待损失较大,外卖骑手往往因为着急完成订单派送工作,对等待损失的敏感程度较高(β=0.9),会较快地做出决策,而新手女骑行人对于等待损失敏感程度较低(β=0.3),会谨慎选择通行;在选择让行时,该情境下,冲突损失较大,新手女骑行人对其敏感程度较高(β=0.9),会较快选择让行,而外卖骑手此时风险意识较弱(β=0.3),往往较慢选择让行。 为分析互让损失对系统演化的影响,对D1和D2取不同的值,固定,(C2+L2)β-W2β=1(-1)进行讨论。由于x和y既可能收敛于0,也可能收敛于1,因此,本文分析不同演化情景中互让损失的影响。 在(x,y)初始值为(0.5,0.5)不变的情况下,将电动自行车和机动车的互让损失分别取1、5 及9,模拟情景2“电动自行车让行,机动车通行”和情景3“电动自行车通行,机动车让行”系统下互让损失参数的变化对演化趋势的影响,如图8所示。 图8 不同互让损失下电动自行车通行概率的演化Fig.8 Evolutionary convergence of electric bicycle passing probability under different reciprocity losses 由图8 可知,在电动自行车选择让行时,互让损失的增加会使电动自行车选择通行策略的概率更慢地收敛于0;而在电动自行车选择通行时,互让损失的增加会让其通行策略概率 更快地收敛于1。即电动自行车互让损失的增加会抑制其通行概率的下降,促进其通行概率的上升。同理,由图9可知,机动车互让损失的增加会促进其通行概率的上升,抑制其通行概率的下降。 图9 不同互让损失下机动车通行概率的演化Fig.9 Evolutionary convergence of vehicle passing probability under different reciprocity losses 现实情况下,如果电动自行车和机动车均选择等待让行策略,会形成博弈双方的互让损失。当互让损失增加时,两车会选择更快地通行,或者更慢选择让行。根据前景理论,行为主体对损失比获益更加敏感,在损失状态下表现为风险偏好,此时,如果选择通行,则可能会造成交通冲突或者安全通过,而如果选择等待让行,则一定会产生等待损失。因此,与必然产生损失的让行决策相比,博弈主体会倾向于选择有风险的通行决策,与实际交通场景相符。 当决策主体面临多个决策时,被舍弃的选项的最高价值即为本次决策的机会成本[15]。在现实的交通环境中,机会成本定义为:当决策主体选择某个策略时,被舍弃策略的最高收益与当前所选择策略的收益之差。当电动自行车选择通行,机动车亦通行时,电动自行车的机会损失为E1-W1-(E1-C1)=C1-W1。当电动自行车选择让行,机动车也让行时,电动自行车的机会损失为E1-(E1-D1)=D1,即互让损失也是电动自行车在博弈双方均选择让行时的机会损失。所以,C1-W1,C2+L2-W2分别是电动自行车或机动车选择通过,博弈对方也选择通过时,电动自行车或机动车的机会损失。 图10 不同机会损失下电动自行车通行概率的演化Fig.10 Evolutionary convergence of electric bicycle passing probability under different opportunity cost 图11 不同机会损失下机动车通行概率的演化Fig.11 Evolutionary convergence of vehicle passing probability under different opportunity cost 现实情况下,若电动自行车骑行人或者机动车驾驶人的机会损失越大,即选择通行产生的损失明显高于让行产生的损失,交通主体会更快地做出让行决策;反之,则会更加谨慎地做出通行决策。从前景理论来看,由于决策权重函数具有非线性的特征,决策者往往会倾向于高估小概率事件,即对小概率事件的感知收益大于其真实收益。机会损失在本文可理解为冒险成本,即冲突损失(加违规损失之和)与等待损失之差,随着机会损失的增加,博弈双方冒险通行所带来的伤害值也将增加,相比之下,让行决策只会引起其产生等待损失。因此,博弈主体更倾向于选择安全性更高的让行策略,与实际道路安全情境相符。 与机动车相比,电动自行车处于交通弱势地位。电动自行车因其冲突损失往往大于等待损失,冒险抢行将增加风险,而机动车处于受益方。为提升城市道路交通文明,调整两车冲突系统的演化方向为“机动车让行电动自行车”,可选择通过制定相关法规适当提高机动车的违规损失。 本文构建了电动自行车与机动车的冲突演化博弈模型,研究不同交通场景下心理感知因素和各损失参数对决策演化过程的影响,主要结论如下: (1)无信控交叉口直行电动自行车和右转机动车的通行冲突系统演化趋势受双方互让损失和机会损失等因素的影响。通过判断模型均衡点及稳定性,可形成“电动自行车让行机动车”“机动车让行电动自行车”“两车互让”“两车相撞”这4种结果。 (2)前景理论相关参数只会影响整个交通系统的演化收敛速度,不影响系统的演化方向。其中,系统演化速度与损失规避系数λ和损失价值敏感系数β成正比;不同类型的骑行人在选择通行或者让行策略时表现出的风险态度不同。 (3)电动自行车和机动车互让损失的增加对各自的通行决策概率起到促进上升和抑制下降的效果,而机会损失的增加对通行概率呈现相反作用。2 模型求解与分析
2.1 模型求解

2.2 稳定性分析
3 数值仿真与结果分析
3.1 前景理论相关参数对系统演化的影响

3.2 互让损失对系统演化的影响
3.3 机会损失对演化结果的影响
4 结论
猜你喜欢
公民与法治(2022年7期)2022-07-22中国特种设备安全(2022年1期)2022-04-26意林(2021年5期)2021-04-18中国管理信息化(2019年18期)2019-10-15扬子江(2019年1期)2019-03-08电子制作(2019年24期)2019-02-23物流科技(2017年9期)2017-10-31小天使·一年级语数英综合(2017年6期)2017-06-07教学考试(高考政治)(2016年1期)2016-03-16应用数学与计算数学学报(2014年3期)2014-09-26