信号交叉口直行非机动车膨胀特性分析与风险评估
2024-03-03 01:02崔洪军周启航朱敏清
交通运输系统工程与信息 2024年1期
崔洪军,周启航,朱敏清
(河北工业大学,a.土木与交通学院;b.建筑与艺术设计学院,天津 300401)
0 引言
目前,中国城市交通管控面临一个重要的问题,即如何管理非机动车辆在交叉口的通行。随着城市经济的快速发展,作为出行最为方便的交通工具之一,非机动车辆的持有比例也在不断上升,其在交叉口的行驶所带来的交通安全问题也随之加大[1]。特别是由非机动车自由行驶所产生的交叉口非机动车群膨胀现象,会对交叉口的释放效率和安全性产生巨大影响[2]。因此,有必要从车辆行驶行为角度研究交叉口处非机动车辆通行时的交通冲突安全风险,对提高道路通行效率和服务水平,降低非机动车带来的影响具有促进作用,也可以进一步为交叉口信号配时提供相关理论依据。
目前,针对非机动车进行的轨迹分析和冲突风险研究已经有很多研究成果,例如,结合速度和间距等行驶特性分析其轨迹[3];通过采集减速和换道等行驶行为研究非机动车的冲突风险[4]等。此外,沈家军等[5]通过分析冲突区非机动车情况,建立机动车与非机动车冲突概率模型;巫诚诚[6]通过视域分析和随机森林模型构建交叉口非机动车冲突的空间预测模型,预测冲突点位置和严重程度;XUE等[7]利用贝叶斯方法建立基于车辆和非机动车的冲突模型。
随着非机动车数量的急剧增长,其在交叉口通行时所产生的膨胀现象越来越严重,一些研究针对这一问题进行了深入探讨。GUO等[8]通过考察影响车辆行驶行为的各种因素,解释自行车的释放膨胀行为;曲绍伟等[9]利用视频轨迹提取技术,通过光流法描述直行电动自行车在绿灯期间的膨胀特征;谭婷[10]通过社会力模型分析非机动车辆对临近机动车的影响。在安全风险评价研究方面,MOHAN等[11]通过交通事故数据分析城市道路安全;蔡晓禹等[12]提出基于车辆OBD 驾驶行为数据及信息熵理论的城市道路交通安全风险预估方法;党晓旭等[13]建立基于交通事故数据的区域道路交通安全评价指标体系。
近年来,随着视频识别技术的快速发展,通过无人机获取的交叉口视频数据类型齐全,精度高,可以此为依据实时分析车辆加减速和并行超车等驾驶行为。因此,本文借助城市交叉口视频数据优势,从时间和空间分析信号交叉口直行非机动车膨胀特性,在此基础上,对直行非机动车的通行区域进行分类,分析不同区域非机动车在膨胀特性下的行驶行为数据,并通过改进的熵权法建立信号交叉口直行非机动车冲突风险评价指标体系及计算方法,预估交通冲突风险。
1 直行非机动车数据调查与膨胀分析
1.1 数据收集与处理
本文通过无人机获取交叉口物理区域内直行非机动车辆行驶数据。如表1 与图1 所示,选择天津市围堤道、海光寺及气象台这3个具有代表性的交叉口,获取其7 月和8 月每周周三和周四早晚高峰时段7:00-9:00 和17:00-20:00 进行交通数据调查。

图1 交叉口现状调研Fig.1 Investigation of intersections

表1 各交叉口情况Table 1 Status of intersections
通过在现场运用无人机拍摄获取交通视频数据,数据收集于2022年7月20日—8月20日。选择在天气晴朗的工作日进行,记录了20 h 的视频数据,获得各种非机动车行驶轨迹特征数据。本文采用1个交叉口信号周期作为基本的分析周期,通过Adobe Premiere Pro(PR)软件裁剪视频,并使用DATAfromsky软件提取视频数据。
目前,DATAfromsky软件已广泛应用于交通状态监测与轨迹提取等各种场景,通过该软件可获取交叉口各类非机动车辆的基本坐标信息、检测时间和车辆速度与加速度等[14]。所获取原始数据如表2所示,包含电动自行车与自行车,其中,并未包含摩托车数据,由于所选交叉口不存在摩托车,因此,被识别为摩托车的个体均为电动自行车。
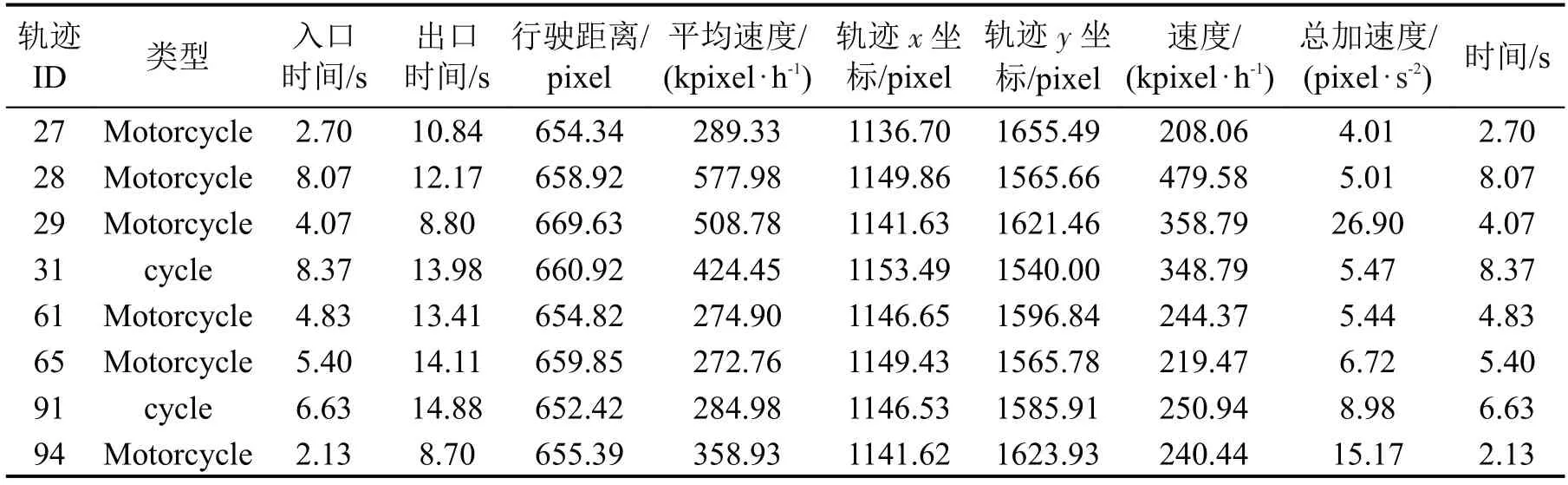
表2 非机动车辆原始轨迹数据Table 2 Raw trajectory data for non-motorized vehicles
由于通过DATAfromsky 所获取的原始数据位于像素坐标系中,其数据单位均为pixel,因此,需要将其转化为经纬度地理坐标下数据,以进一步的分析。
通过DATAfromsky 软件中的地理坐标转化功能,以视频首帧图像为地理坐标转化参考,设定4个地面参照点。通过谷歌地图获取各地面参照点的经纬度坐标,并在DATAfromsky软件的WGS-84界面按顺序输入。同时,为保证结果精度,通过调整地面参照点的位置,使其偏差值(dev)保持在0.1 m以下,所得结果如表3所示。
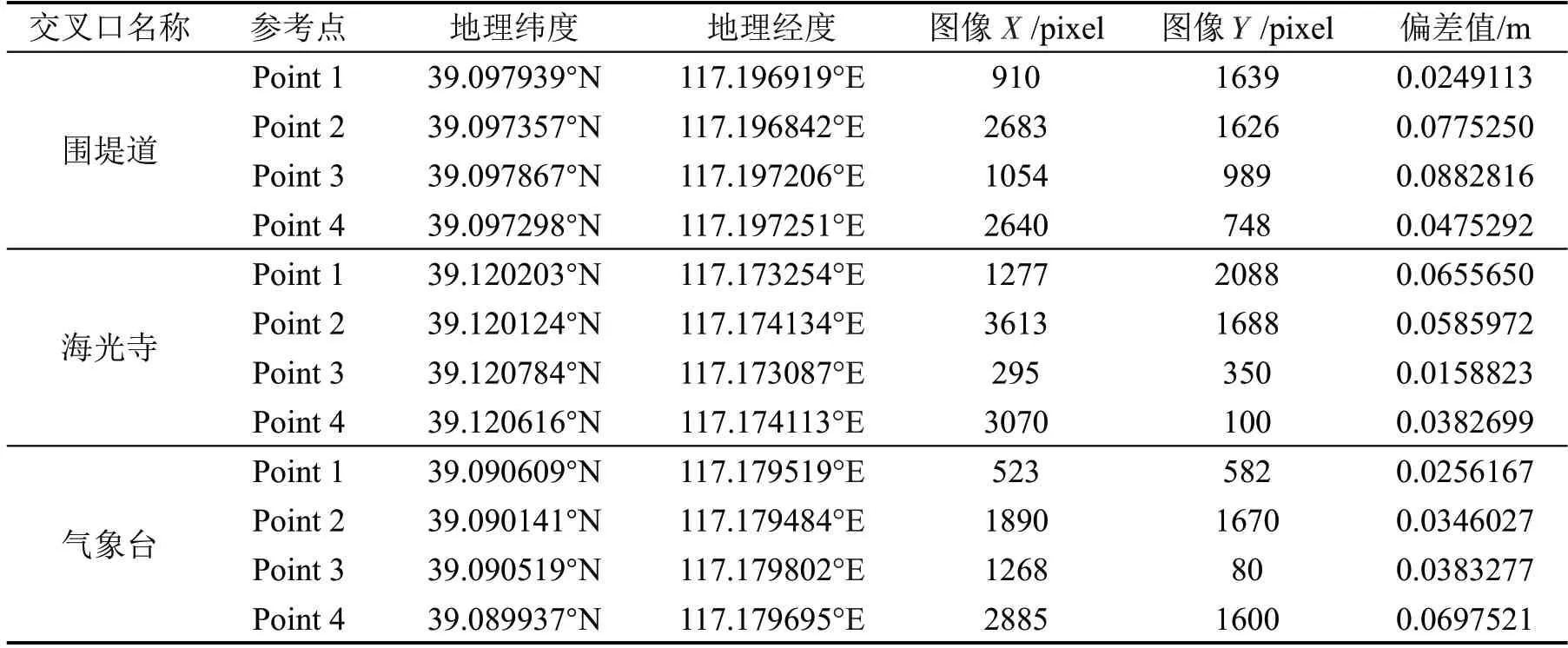
表3 各交叉口地面参照点坐标及偏差值Table 3 Coordinates and deviation values of ground reference points at each intersection
为验证DATAfromsky 转化后输出数据的准确性。以交叉口实验电动自行车作为研究对象,以车辆轨迹与车辆运行速度为指标,进行对比实验,对比结果如图2所示,DATAfromsky所得到轨迹数据以及车辆速度的大小与变化均与车载GPS 所获取的轨迹和速度基本一致,说明DATAfromsky输出的数据具有较高的可靠性。
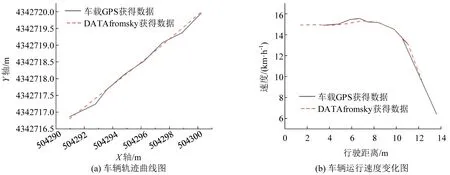
图2 对比实验车辆运行速度与轨迹曲线Fig.2 Comparison of experimental vehicle running speed and trajectory curves
建立平面坐标系,以非机动车进口道中点处为原点,直行前进方向为X轴方向,临近机动车道方向为Y轴方向。通过Python处理数据,获取其在平面坐标系下的车辆行驶行为数据,反映非机动车辆的运动状态。数据包括X坐标方向车辆位移、Y坐标方向车辆位移、X坐标方向车辆速度、Y坐标方向车辆速度、车辆纵向加速度及车辆横向加速度等。处理后实例数据如表4 所示,其中,xij为i时刻j非机动车的X坐标,yij为i时刻j非机动车的Y坐标,Sxij、Syij分别为i时刻j非机动车的X、Y坐标方向位移,Sij为i时刻j非机动车的总位移量,Vyij、Vxij为i时刻j非机动车的X、Y坐标方向速度,Vij为i时刻j非机动车的速度,Axij、Ayij为i时刻j非机动车的X、Y坐标方向加速度,Yij为i时刻j非机动车横向总位移。
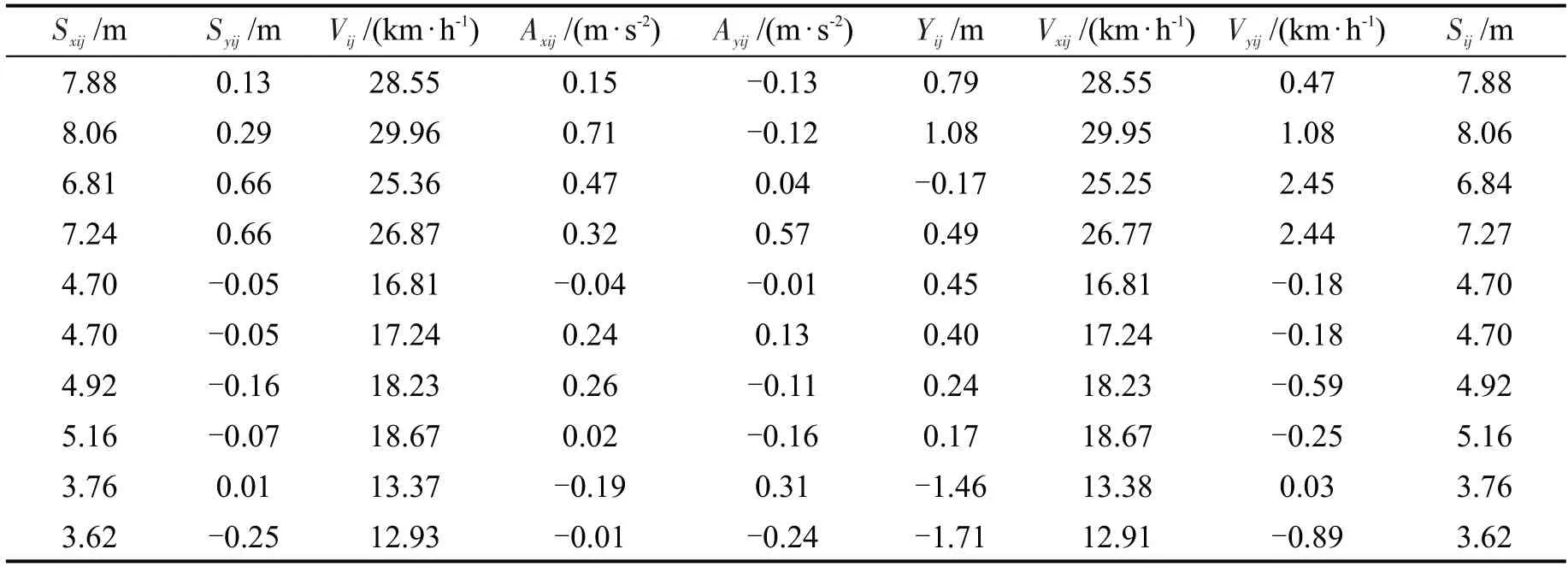
表4 非机动车辆行驶数据Table 4 Non-motorized vehicle travel data
1.2 膨胀现象与释放阶段分析
非机动车膨胀指红灯期间积聚的非机动车辆群在放行时,由于缺乏隔离措施以及车辆过多等原因,出现的沿直行方向横向偏移现象[9]。在该情况下,非机动车辆间频繁的发生超车和并排行驶现象,使膨胀过程中存在大量的冲突与安全隐患。因此,从非机动车的膨胀特性角度出发,分析直行非机动车的行驶行为与特征。
通过无人机视频获取直行非机动车辆通过交叉口物理区的车流量数据。天津市围堤道交叉口绿灯释放时间内非机动车辆的流量变化如图3 所示,其直行相位绿灯释放时间为45 s,以5 s 为时间间隔记录流量。

图3 绿灯释放时间内非机动车流量变化Fig.3 Change in non-motorized traffic during green light release time
在绿灯释放期的9个时间间隔内,非机动车辆的流量随着时间的变化逐渐减少。在15 s 后的时间间隔内,流量的变化逐渐趋于稳定。流量数据保持在0~2 veh·s-1。(5,10]和(10,15]的流量数据分布在比其他时间间隔更高的位置,中值约为8 veh·s-1,最高可达到10 veh·s-1。
因此,总结得出,直行非机动车通过交叉口时的3 个明显阶段[9]:释放初期、释放中期及释放末期。可看出,在[0,15],非机动车流量占总流量的60%~80%。因此,可以得出,电动自行车在绿灯期间的排放主要集中在释放初期,即[0,15]内,该阶段也是非机动车群膨胀现象主要发生阶段,其阶段特征最为明显,该时段的冲突情况最为严重,因此,以第1阶段的非机动车膨胀情况为主要研究对象。
1.3 行驶轨迹区域划分
在交叉口内,由于交叉口长度短、进出口道数多及缺乏机非隔离带等问题,导致交叉口内部车辆间相互干扰大,冲突点数量多,呈现出独特的交通流特征。其中,非机动车膨胀尤为突出,作为一个渐变的过程,其在不同行驶区域内,非机动车辆冲突风险与行驶行为会有所不同。因而,在考虑直行非机动车膨胀特性的基础上,根据统计的车辆轨迹数据,可以通过K-means函数对车辆轨迹特征进行聚类分析,将城市信号交叉口非机动车直行行驶区域分为释放区、膨胀区和汇入区这3类,如图4所示。
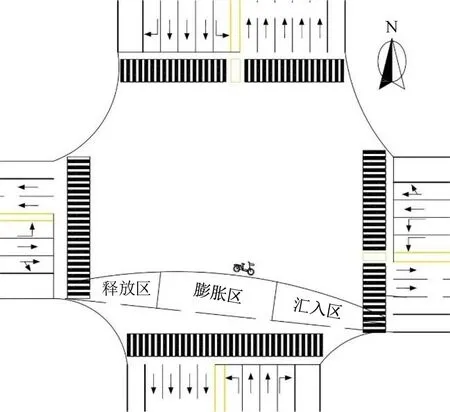
图4 信号交叉口直行非机动车通行Fig.4 Signalized intersections for straight through non-motorized traffic
聚类分析是当前交通分析中常用的研究方法。K-means算法是一种划分式聚类方法,需要事先确定簇类的数目,该算法通过反复迭代,直到满足停止条件为止,将数据进行分类。K-means算法适用于凸型数据,具有结构简单和结果明确且收敛速度快等特点。因此,本文使用K-means算法对通行区域的非机动车辆行驶轨迹进行聚类分析,以获得更清晰的结果。
根据观察到的非机动车辆的轨迹变化,在对比分析后,发现k=3 时,聚类效果最佳,因而,取k=3,对其进行聚类。使用欧式距离计算每个轨迹点与聚类中心之间的距离,并将轨迹点分配到距离最近的聚类簇中,其中,欧式距离为
通过对产生的3个簇进行分类,并计算每个簇中与其他点的平均距离最小的点,确定每个簇的质心。重复该过程,直至每个簇的质心位置不再移动,以精确划定交叉口的释放区、膨胀区和汇入区的范围,如图5所示。
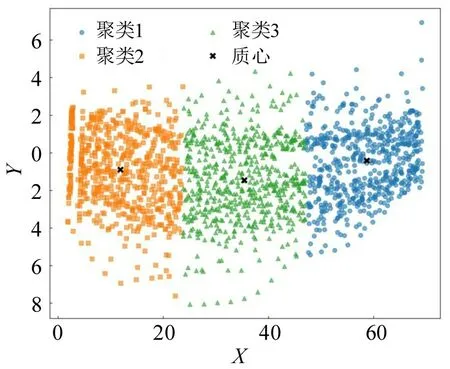
图5 通行区域K-means聚类分析Fig.5 K-means cluster analysis of access zones
结果表明,在交叉口内,可以从不同的阶段或区域分析非机动车辆的行驶行为,每个区域的行驶行为和冲突风险有所不同。通过对这些特性的研究,可以更好地理解交通流特点,并采取相应的交通管理措施改善交叉口的交通状况。
2 考虑膨胀特性的信号交叉口直行非机动车冲突风险评价
2.1 不同区域关键指标选取
由于在非机动车膨胀过程中,包含着大量的并行与超车行为。其中,无论是并行还是超车行为,均会给周围车辆的行驶带来干扰,导致冲突风险的产生。因此,在确定释放区、膨胀区及汇入区范围后,通过分析不同区域内的非机动车辆行驶行为信息,进一步判断冲突存在与否以及其强烈程度。
(1)释放区
分析释放区的非机动车行驶行为发现,非机动车流通过停止线驶入交叉口,由压缩状态逐渐转换为自由行驶状态,同时,存在大量的车辆超车行为。原因为:停止线排队导致非机动车辆密度高,车辆间距小,影响后方排队车辆;驾驶员目的性强,对前方慢速行驶的非机动车不满,容易超车,因此,超车频繁,车辆群体迅速膨胀。分析释放区非机动车辆的数据显示,该区域的纵向加速度分布广泛,横向变化时速度和加速度以x坐标正方向为主,与超车行为相符,如图6所示。
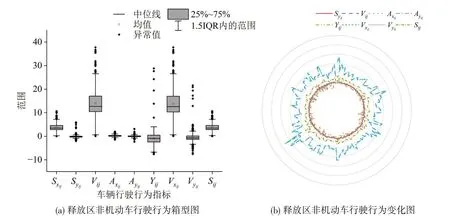
图6 释放区非机动车行驶行为分析Fig.6 Behavioral analysis of non-motorized vehicles in release zone
(2)膨胀区
分析膨胀区非机动行驶行为显示,在通过停止线进入交叉口后,非机动车辆处于自由行驶状态,同时,存在大量的车辆并行现象。导致这一现象的原因包括:驾驶员在认知上存在着尽快通过交叉口和保持安全距离的矛盾心理,部分车辆存在超车现象;受临近车道机动车辆的影响,无法进一步膨胀,因此,车辆并行现象增加,使非机动车群体膨胀程度达到顶峰。分析膨胀区非机动车辆的数据发现,在该区域的横向加速度小于释放区,纵向加速度则大于封闭直线段。由于大量车辆并行行为存在,车辆横向变化时与临近机动车辆和非机动车辆的冲突影响较大,如图7所示。
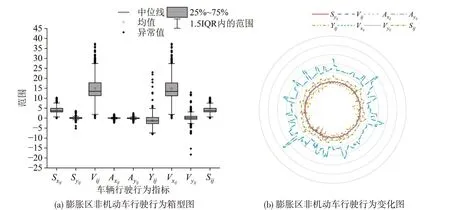
图7 膨胀区非机动车行驶行为分析Fig.7 Behavioral analysis of non-motorized vehicles in expension zone
(3)汇入区
分析汇入区的非机动行驶行为,对于该区域内的非机动车辆,电动自行车流扩散后车头方向逐渐收敛至行进方向;在最后临近驶入下游非机动车道时,车头方向进一步收束,并最终达到与非机动车道方向一致,因而,在该阶段中,同样存在着大量的超车行为。分析汇入区非机动车辆的车辆行驶数据表明,车辆在该段的横向碰撞频率增加,由于车辆群的收缩,横向负位移与速度的变化要大于正向位移与速度的变化,车辆的横向加速度大幅提升,如图8所示。

图8 汇入区非机动车行驶行为分析Fig.8 Behavioral analysis of non-motorized vehicles in convergence zone
2.2 评价体系建立
通过分析不同区域内的非机动车辆行驶行为信息,可以看出,在膨胀过程中,不同区域的非机动车行驶行为有所不同。在释放区域,非机动车辆以超车行为为主;在膨胀区域,非机动车车辆以并行行为为主;在汇入区域,非机动车同样以超车行为为主。
因而,构建以释放、膨胀及汇入这3 个区域的冲突风险熵为一级指标,不同区域膨胀过程中的车辆行驶行为指标为二级指标的信号交叉口直行非机动车冲突风险评价体系,提出基于熵权法的膨胀过程中非机动车辆冲突风险熵的计算方法。
由于加速和超车等行为,车辆在释放阶段会有较大的纵向和横向速度变化。因此,车辆纵向加速度(A1)、横向正位移加速度(A2)、纵向速度(A3)及横向速度(A4)是通行释放区域(A)中行驶行为的次要指标。
由于车辆并行行为以及临近机动车辆的影响,车辆降低纵向加速度,改变横向速度。因此,车辆行驶速度(B1)、车辆纵向加速度(B2)以及车辆横向加速度(B3)是通行膨胀区域(B)中行驶行为的次要指标。
在车辆出口段,由于车辆的减速和一些驶出车辆的变道,出现了纵向速度降低和负方向横向速度变化。因此,车辆纵向减速度(C1)、车辆横向负位移加速度(C2)、车辆纵向速度(C3)以及车辆横向速度(C4)是通行汇入区域(C) 中行驶行为的次要指标。
综上,信号交叉口直行非机动车冲突风险评价体系如图9所示。
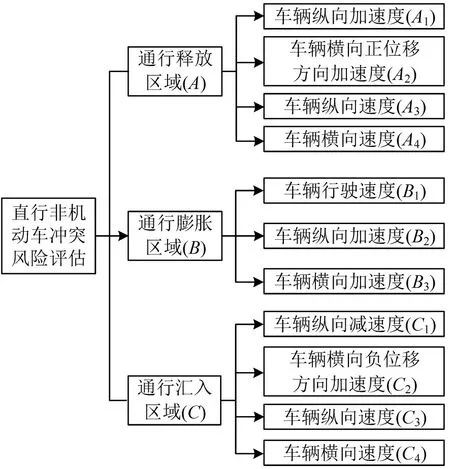
图9 信号交叉口直行非机动车冲突风险评价体系Fig.9 Signalized intersection straight ahead non-motorized vehicle conflict risk evaluation system
3 直行非机动车冲突风险熵模型
3.1 模型构建
目前,常见的风险评价方法主要有熵权法、层次分析法(AHP)和灰色关联分析。其中,层次分析法(AHP)是通过专家判断和对比确定指标权重,具有较强的主观性;灰色关联分析是在数据有限、特征缺失或质量不高的情况下,通过建立关联度模型评价风险程度,不适用于复杂的风险评估问题。
熵权法是基于信息熵原理,通过熵值判断指标的离散化程度,认为离散化程度越高的指标在整个评价体系中作用越大。在车辆运动过程中,车辆速度和加速度的变化越大,其离散程度越大,在评价体系中的权重越高,车辆发生冲突风险越高。因而,熵权法更适合描述车辆行为对交叉口非机动车冲突风险程度的影响,从而更全面地评估车辆冲突风险[12]。
本文所提出的评价体系以非机动车辆的速度和加速度等行为为主要评价指标,因此,建立改进的熵权评价模型,结合大量的行驶行为数据,进行非机动车辆冲突的风险熵计算,可以有效准确地评估非机动车辆的冲突风险。其具体计算步骤如下。
Step 1 基于原始数据构建矩阵R′。
设有n个待评价对象,每个对象有m个指标,设第l个评价对象的第h个评价指标值为,得到原始数据矩阵R′为
Step 2 同向化处理原始矩阵,将各指标转化为标准化指标,得到标准化矩阵R为
其中,标准化后的指标值rkh,其正向指标标准化处理为
逆向指标标准化处理为
Step 3对R矩阵归一化后得到矩阵P,即
Step 4 计算各指标的信息熵eh为
Step 5 为充分考虑各指标值的分布情况及离散程度的差异,对各指标进行赋权,以均衡其对综合评价值的影响。传统的熵权法在所有熵值趋近于1时,存在问题,会过度放大差距,导致赋权不合理[15]。特别是在可靠性较高的系统中,部分指标值会非常接近1。
因此,本文采用改进的熵权法[16]解决这个问题。这种改进的方法不仅能克服传统熵权法的缺点,还能保持拉开差距的能力,在考虑指标间差异的同时,避免过度放大差距的情况。
根据改进熵权法,各指标权重为
式中:ωh为改进后计算所得第h个评价指标值的权重;为除1外的各指标熵值的均值。
利用改进的熵权法,可以根据各指标的重要性和对综合评价的贡献程度赋予合理的权重。通过这种方法,为系统的评价结果提供更可靠的依据。
3.2 结果分析
通过冲突风险熵模型评估非机动车行驶行为。通过处理大量的不同交叉口非机动行驶行为数据,使用冲突风险熵模型评估这些交叉口数据。根据均方根误差分析不同交叉口不同方位车辆评估结果的准确性。如果误差在合理范围内,则认为结果是有效的。
通过这种方法,可以高效地进行非机动车辆冲突风险的评估,同时,保证评估结果的准确性。由于样本数据已经覆盖不同类型的交叉口,可以全面考虑各种实际情况下的行驶行为对冲突风险的影响。
式中:RRMSE为均方根误差;o为总计存在o个该评价指标;为该评价指标的平均权重;ωu为第u个该评价指标的权重。
计算后所得各交叉口不同区域结果如表5 和图10所示。
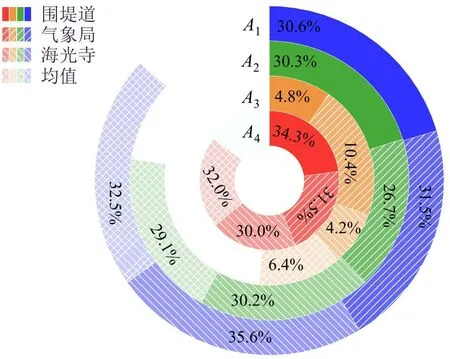
图10 释放区各评价指标所占比例Fig.10 Proportion of each evaluation indicator in release zone

表5 释放区各评价指标所占比例Table 5 Proportion of each evaluation indicator in release zone
通过表5 对不同交叉口的释放区的综合评价分析,结合图10所展示的内容,车辆的纵向加速度(A1)对该阶段交叉口非机动车辆冲突影响最大,为32.54%;其次,为车辆横向正位移加速度(A4)与横向车速(A3),占比为29.05%与31.95%;车辆的横向车速是影响最小的,占比为6.44%。
通过表6 对不同交叉口膨胀区的综合评价分析,结合图11 所显示,车辆纵向加速度(B2)对该阶段交叉口非机动车辆冲突影响最大,为51.05%;其次,为车辆当前时刻的横向加速度(B3),占比为39.69%;当前时刻车速(B1)是影响最小的,占比为9.25%。

图11 膨胀区各评价指标所占比例Fig.11 Proportion of each evaluation indicator in swell zone
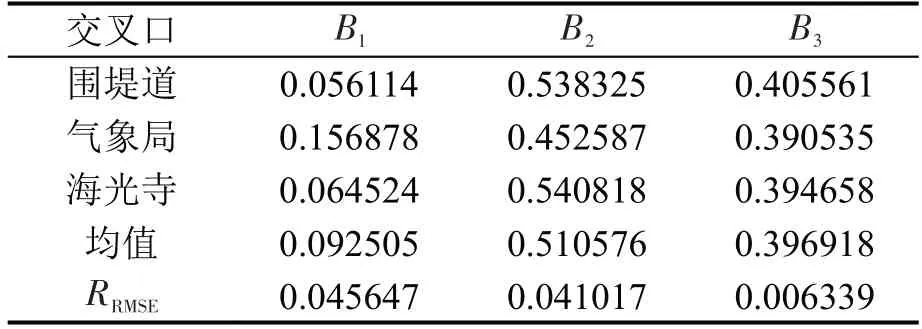
表6 膨胀区各评价指标所占比例Table 6 Proportion of each evaluation indicator in swell zone
通过表7 对不同交叉口汇入区的综合评价分析,结合图12所展示出的内容,车辆的纵向减速度(C1)与横向负位移加速度(C2)对该阶段交叉口非机动车辆冲突影响最大,为36.69%与31.54%;其次,为车辆横向速度(C4),占比为25.75%;最后,为车辆纵向速度(C3),占比为5.99%。

图12 汇入区各评价指标所占比例Fig.12 Proportion of each evaluation indicator in confluence zone
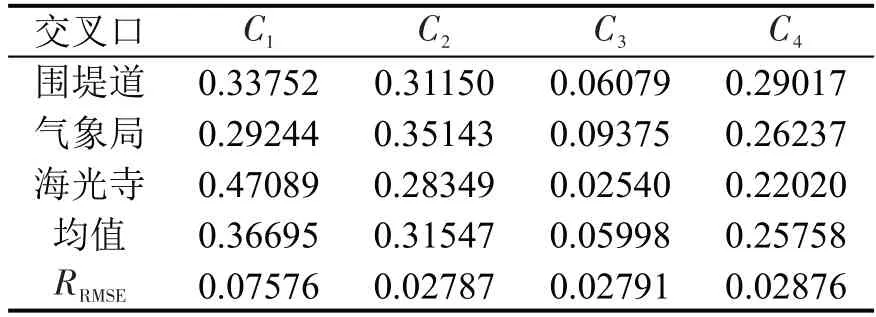
表7 汇入区各评价指标所占比例Table 7 Proportion of each evaluation indicator in confluence zone
通过分析表格与相关图例,获取各交叉口不同区域的评价指标所占比例,其计算误差在合理范围内证明评估结果的有效性。因此,该方法可以用来评估信号交叉口直行非机动车冲突风险。
4 直行非机动车膨胀过程中实时交通冲突风险评估
基于非机动车辆冲突风险熵模型,实时评价交叉口不同区域的非机动车辆冲突风险等级为
式中:rlh为对应评价指标h的行驶行为。
在非机动车辆初期发生冲突时,由于在红灯时间内到达车辆在非机动车道处形成集群,因此,在绿灯初期,非机动车辆释放是集体通行状态,当前方车辆发生冲突时,会导致后方车辆的通行。而在绿灯末期,由于非机动车辆的到达是离散的,因此,当其发生冲突时,其影响较小。
因此,在不同的时间段内,非机动车流的释放情况有所不同。与非机动车释放阶段相结合,分析不同时间下,通行区域内的非机动车冲突变化趋势,通过时间变化图与交叉口热力图等,有效直观的进行表述分析。围堤道1 个绿灯周期内非机动车释放随时间的变化如图13所示。
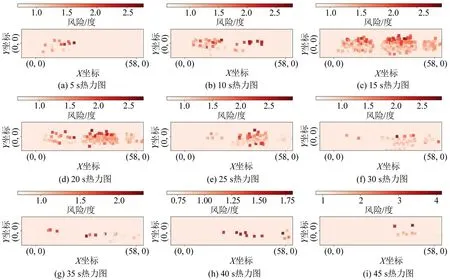
图13 随时间变化的非机动车冲突风险热力图Fig.13 Heat map of non-motorized conflict risk over time
从图13 可以看出,随时间变化的非机动车风险热力图整体变化趋势与非机动车膨胀过程的时空变化表现一致。从非机动车辆进入交叉口开始,随着非机动车辆不断的涌入交叉口,直至当前周期结束,通行区域的冲突风险程度开始上升,直至非机动车群膨胀达到最大时,其冲突风险也达到最大,随后,随着非机动车辆离开通行区域,冲突风险也随之降低。在非机动车膨胀达到最大的情景,非机动车高风险区域主要集中在通行区域边缘区域与车辆膨胀区域,这些区域的车辆超车行为与并行行为频发,即车辆加减速与行驶速度较大的区域。
综上所述,图示以及相关数据显示了非机动车在交叉口通行过程中的冲突风险变化。随着非机动车的膨胀和离开,冲突风险也相应地增加和降低。高风险区域主要集中在通行区域边缘和车辆膨胀区域,与行驶行为相一致。
5 结论
本文基于信号交叉口直行非机动车膨胀的特点,对信号交叉口的直行非机动车冲突风险进行了评价研究,主要研究结果如下:
(1)基于非机动车膨胀特性的时空分布规律,利用K-means 聚类分析将非机动车通行区域划分为释放区、膨胀区及汇入区这3个区域。根据车辆在不同区域的不同行驶行为特征,确立释放区域、膨胀区域及汇入区域为一级指标,车辆纵向加速度、纵向速度及横向速度等为二级指标的信号交叉口直行非机动车冲突风险评价体系。
(2)利用改进的熵权法构建风险冲突熵模型,并将其运用于信号交叉口直行非机动车冲突风险评价体系。在对围堤道、气象局和海光寺这3个交叉口的计算实验中,得到各指标均方根误差均在0.1以内,证明该体系在不同交叉口上的可行性与准确性。
(3)通过信号交叉口直行非机动车冲突风险评价体系,结合天津市围堤道交叉口进行实例分析,获得该区域周期热力分布图变化,热力图结果表明,该区域的冲突风险点分布与变化趋势与非机动车膨胀过程的时空变化表现一致,证明本文研究的合理性。本文通过评估信号交叉口直行非机动车风险,识别和了解潜在的安全隐患,以助于采取相应的交通管理措施和政策改善交通安全状况。
猜你喜欢
当代水产(2022年6期)2022-06-29
环球时报(2022-04-16)2022-04-16
井冈教育(2020年6期)2020-12-14
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
浙江人大(2014年6期)2014-03-20