基于COMPASS iStability的浮船坞稳性计算
2024-02-26 10:56于峰
船海工程 2024年1期
于峰
(中国船级社武汉规范研究所,武汉 430022)
COMPASS iStability系中国船级社武汉规范研究所主持开发的内河船舶稳性计算程序,该系统一改老版程序二维建模方式,赶上了基于船体表面网格积分的三维建模潮流[1],经过测试、试运行、运行、改版,已渐趋成熟,正一步步缩短与国外同类软件,如NAPA 软件[2]、Moses 软件[3]距离。以浮船坞命令流方法建模为例,介绍命名规则、5分段建模与整体建模、坞墙开口7分段建模和体过渡整体建模,比较不同方法稳性计算结果,证实整体建模既快速简捷,又能保证计算精度。
1 COMPASS iStability简介
COMPASS iStability稳性计算包括主船体外壳三维建模,切割主船体外壳生成单元体或撇开主船体外壳构建单元体,单元体组合生成舱室,静水力、舱容、稳性等计算要素输入,程序运算,结果输出。
主船体三维建模:基于界面通过操作、对象、方法的交互式方法;肋位横剖线/站线型值导入法;完全用命令流的纯命令流方法,各方法各有优缺点,既可以独立运用,也可以交替使用。命令流方法具有简单、快捷、可重现建模过程等诸多优越性,要求操作者具有一定的经验。无论哪种方法,首先必须完成三维建模。采用直角正交坐标系,船长方向为X轴,向船首为正,船宽方向为Y轴,向左舷为正,型深方向为Z轴,向上为正,坐标原点,多在尾垂线或船中。
三维建模完成后,通过界面输入编辑计算要素:含静水力、舱容、完整稳性、许用重心高度、破损稳性、倾斜试验。
最后,程序运算,计算方法为三维网格积分法[4],输出结果。
2 浮船坞三维建模
2.1 浮船坞概况
坞体长 129.60 m,左、右坞墙宽 3.00 m,
坞宽 33.60 m,中龙骨处浮箱高度 3.20 m,
坞深 10.50 m,
龙骨墩上表面距基线 4.20 m,
舷侧压载水舱顶距基线 7.70 m,
舷侧处浮箱高度 3.10 m,
作业吃水 2.80 m,
作业吃水排水量 12 265.1 t,
最大沉深吃水 8.20 m,
最大沉深排水量 17 191.9 t,
设计举升能力 6 000 t,
最大沉深排水量(坞墙开口) 17 105.5 t,船中 Fr108,肋距 0.60 m。
浮船坞左右舷对称,首尾也对称。每侧坞墙在首尾沿纵向有3个道坡,坡道上有2个平台。
2.2 建模要点、命名规则和横剖线
2.2.1 建模要点
顺利建模,不出差错,尤其是不要出现面不能封闭的情况。
在顺利建模,不出差错的前提下,尽可能快速、简捷地完成建模。有时,明知道用传统的线面方法是可以完成建模的,但是,由于分段太多,线面太多,耗时太多,不得不舍弃,另寻简捷方法。
好的建模,思路清晰,可以收到事半功倍的效果。不好的建模,对线、面等要素的命名过于随意,没有规律可循,审核需要借助高亮显示,反推名称的含义,对模型细节处理,要么不够简捷,要么简化过头,产生失真。
2.2.2 命名规则
三维建模需要对点、线、面、体、舱室单元体等用到的要素命名,以肋位号Fr或站号S为依托,附带数字,其中点“.”指加,“-”指减,下划线“_”指范围,船底和甲板后数字为Y坐标值,舷侧后数字为Z坐标值。Heri指水平线,Vert指垂直线,各要素的命名遵循简捷易懂有规律的原则,见表1。
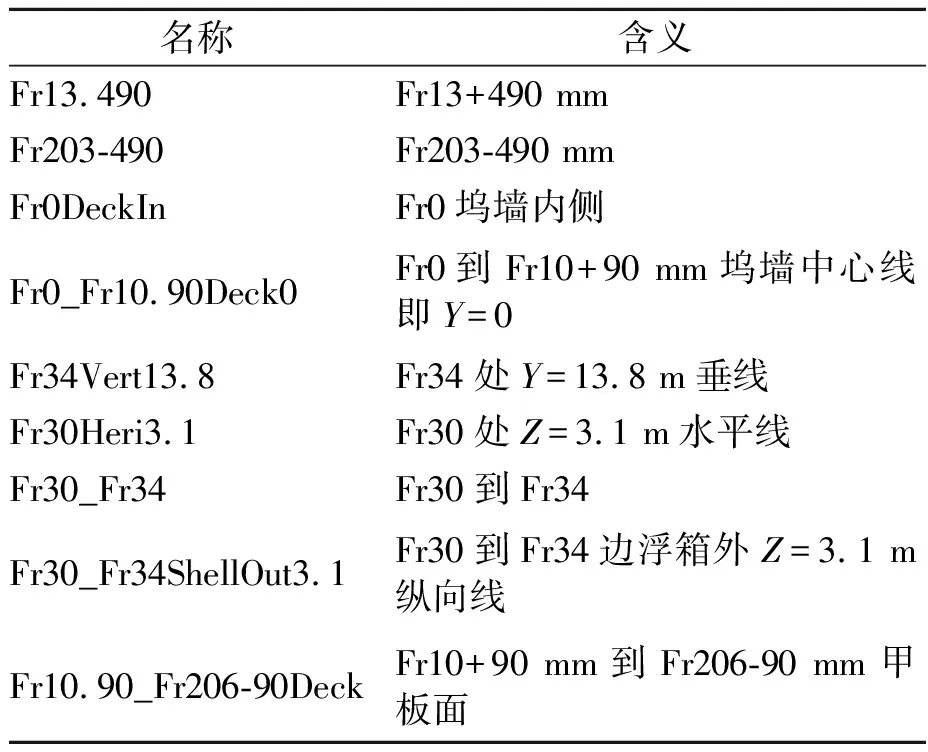
表1 线、面、体名称及含义
该命名方法可以从容应对建模中多个分段及对应的线和面,可读性强,可维护性高。
2.2.3 横剖线
建模前要规划处理边浮箱与主体的连接,将肋位横剖线分成2段:船底线和外舷线,甲板线和内舷线,只分一段会导致围不成封闭的面。
沿船舶纵向突变处的横剖面,即斜坡道起止剖面需要逐一输入,以控制纵向线型,斜坡道上有2个平台,每个平台起止处各取1个剖面,加上斜坡道起止处2个剖面,及首尾封板,共14个剖面,见图1。

图1 横剖线
解决面无法封闭的问题,要依据具体船型寻求办法,而将横剖线划小,即本来可以在一次命名中完成的线,拆分成2次或2次以上完成,命名也是2次或2次以上,让每个面尽可能由四条边围成。这样,不但容易形成面,而且面划网格时也会规整,便于积分求解。
解决面无法封闭,还可以尝试将纵剖线向外延伸,在船尾线型变化激烈处,将起于尾封板,向船首方向的纵剖线尽量向船首延伸,或者增加纵剖线数量。
2.3 坞墙无开口
2.3.1 5分段建模
坞墙无开口,船首到船尾采用首部、中部、尾部分段式方法,尾部3个斜坡道2个平台划分1个分段,尾封板向前平直部分划分1个分段,首部与尾部相同,也划分2个分段,加上中部1个分段,共划分2+1+2个分段。
首尾封板要建梁拱,其他剖面宽度与首尾封板相同,梁拱也相同,中间各线型的梁拱省略。尾封板上增加垂直线,与甲板线、船底线对应,否则围不成封闭的面,首尾封板单独成型。
为优化网格,增加了甲板线、船底线、舷侧线等纵剖线。自尾到首依次连接Y坐标相同的点得到。
所需横剖面、线、面、命令行见表2和图2。

图2 坞墙无开口5个分段
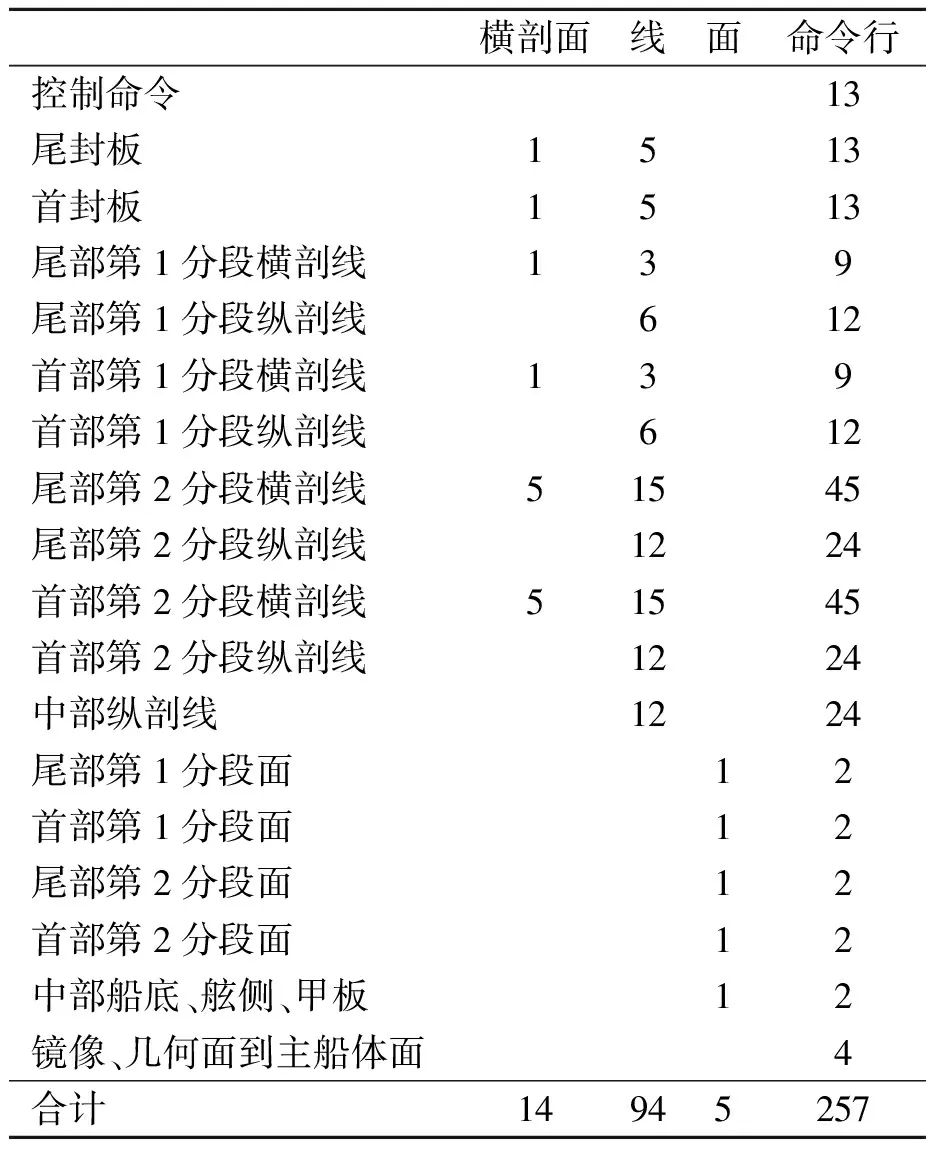
表2 坞墙无开口5个分段命令行组成
2.3.2 整体建模
对于线型简单的船型,可以只划分首部、尾部2段,或者整个主船体只划分1个分段。
浮船坞线型简单,除坞墙斜坡道外,均是规则四边形,首尾部可以不划分分段,采用首部、中部、尾部一体式方法建模。坞墙无开口,船首到船尾划分1个分段,省略横剖面上的梁拱线5条,及斜坡道平台处的纵向线5条后,所需横剖面、线、面、命令行见表3,图3,图4和图5。
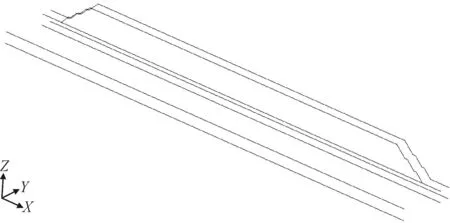
图3 纵向线
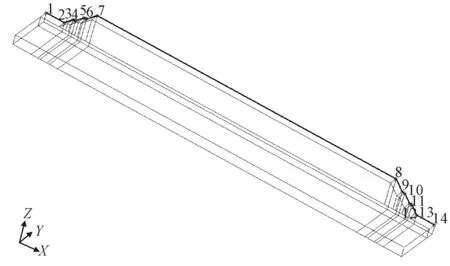
图4 坞墙无开口1个分段
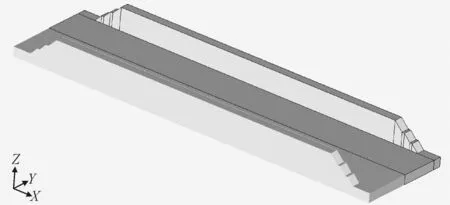
图5 坞墙无开口主船体

表3 坞墙无开口1个分段命令行组成
建面时,中部船底面、舷侧面、甲板面1次成型。镜像得到右舷面,见图6。

图6 坞墙有开口7个分段
2.4 坞墙有开口
2.4.1 7分段建模
左右舷边浮箱共有4个开口,长×宽×高为2.4 m×3.0 m×3.0 m,位于Fr30~Fr34与Fr182~Fr186。当坞墙上有开口时,开口处要单独划分1个分段,开口前和开口后各划分1个分段,此即不借助体过渡完全用线面建模。
对于首尾部各有1个开口情况,尾部要划分3个分段,首部也要划分3个分段,加上中部1个分段,沿纵向至少要分3+1+3个分段,所需横剖面、线、面、命令行见表4和图6。

表4 坞墙有开口7个分段命令行组成
如果首尾部各有2个开口,沿纵向至少要分5+1+5段,此方法有大量线面需要命名,建模过程较为繁琐[5]。如果不借助体过渡,直接用线和面,当坞墙开口有部分处于坞墙斜坡时,建模工作会变得异常繁琐。
2.4.2 体过渡整体建模
更进一步的简化办法是忽略开口,建封闭面,由封闭面建体,扣除开口处的体,带开口的体退化到带开口的面。每一步对应的命令流只有1条,相当简捷。此即为借助体过渡建模。
坞墙有开口,船首到船尾划分一个分段。先假定没有开口,整体建立封闭面模型,由面模型生成体模型,再将开口建成船艏、船艉,左舷、右舷4个体模型,运算生成具有开口的体模型,最后由具有开口的体模型生成具有开口的面模型,此方法需要命名的线面最少,建模过程最简捷。
所需横剖面、线、面、体、命令行见表5,图7和图8。
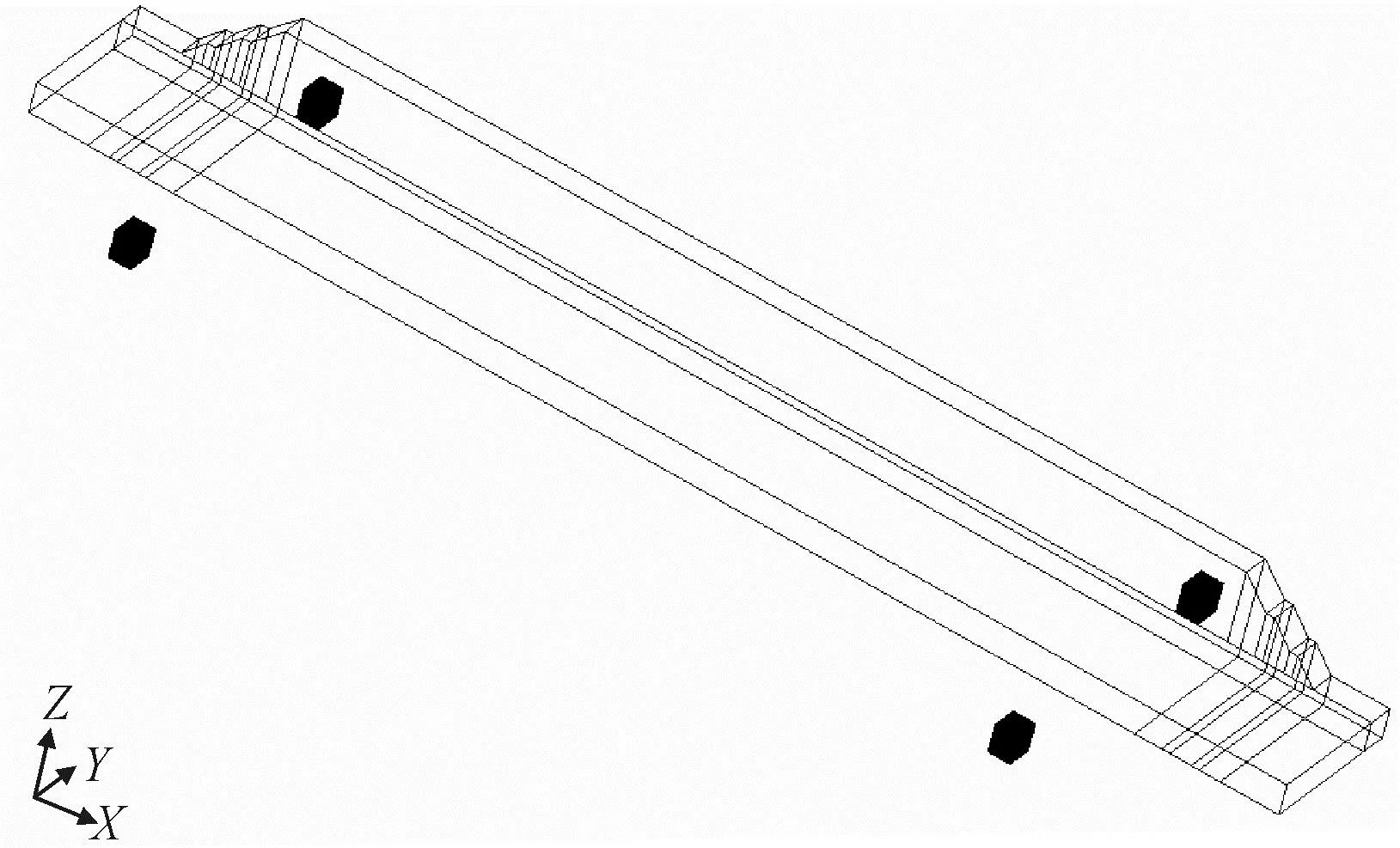
图7 坞墙有开口1个分段

图8 坞墙开口后主船体

表5 坞墙有开口1个分段命令行组成
2.5 不同方法比较
2.5.1 建模工作量
沿船长划分1个分段与划分5个分段相比,除横剖面数量相同外,线、面、命令行数量几乎减少一半,使得建模工作量大幅减少,建模中的查询、纠错也更容易,可显著地提高建模效率,见表6。

表6 坞墙无开口五个分段与整体建模
沿船长划分1个分段与划分7个分段相比,增加体6个,命令只增加16行,横剖面数量减少4个、线、面、命令行数量减少一半以上,模型复杂时,借助体极大地减少了建模工作量,见表7。

表7 坞墙有开口7个分段与体过渡整体建模
2.5.2 稳性计算结果
坞墙无开口,分段建模与整体建模稳性计算结果完全一致。坞墙有开口时,稳性计算与坞墙无开口比较,最大复原力臂、复原力臂面积衡准数、风压衡准数等略有差异,吃水超过开口后,排水量、重心垂向坐标也有差异,但不影响稳性计算结论[6],稳性曲线面积随着船舶载重量的增加下降幅度较大[7],见表8。

表8 坞墙无开口和坞墙有开口稳性计算结果
3 结论
1)整体建模工作量大大少于分段建模工作量,二者稳性计算精度相同。
2)无论是船体建模还是舱容建模,借助体过渡,可以有效减少建模工作量,且模型越复杂,效果越明显。
3)命令流方法建模,中间过程便于修改,分析对比方便快捷。
猜你喜欢
汽车工程师(2023年12期)2023-12-13
舰船科学技术(2022年10期)2022-06-17
科技风(2020年17期)2020-07-04
客车技术与研究(2020年3期)2020-06-23
计算机与网络(2019年13期)2019-09-10
电子技术与软件工程(2017年12期)2017-07-05
无线互联科技(2016年17期)2016-10-19
科技资讯(2016年6期)2016-05-14
天津职业院校联合学报(2014年2期)2014-09-20
船海工程(2013年6期)2013-03-11