公交站点区域行人与非机动车交互行为建模与仿真
2024-02-20 09:57:38魏中华马厚强王铭乾黄文佳
科学技术与工程 2024年1期
魏中华, 马厚强, 王铭乾, 黄文佳
(1.北京工业大学北京市交通工程重点实验室, 北京 100124; 2.南京市城市与交通规划设计研究院股份有限公司, 南京 210002)
目前,中国公交站台普遍沿机动车道和非机动车道隔离带设置,进出站台的行人必须穿越非机动车道,易与非机动车争夺路权,引发行人与非机动车冲突。当前针对公交站点区域的研究主要集中于站台的设置位置、建立回归模型研究行人与非机动车冲突的影响因素。Afghari等[1]对沿机非隔离带设置的公交站点区域行人和自行车的冲突特性进行研究,分别用后侵入时间(post encroachment time, PET)、冲突时间(time to collision, TTC)和预测后侵入时间(predicted post encroachment time, PPET)3种冲突指标表征人非冲突的严重性,结果发现PET效果更好;Ulak等[2]证明了公交站点位置与行人冲突之间存在显著的空间统计关系,为量化和评估公交站附近的行人安全,提出公交车站安全指数(station safety index,SSI);曹淑超等[3]考虑二维空间内自行车间的错位冲突及动态换道行为特征,细化了模型网格密度及模拟时间步长;Beitel等[4]分析骑行自行车速度、接近角度和行人密度评估行人与自行车共存的风险;Zhang等[5]通过视频记录提取公交车乘客和骑自行车之间的交互和冲突,分析多个影响因素对公交车站拥堵和安全风险的影响;孔令争等[6]改进社会力模型再现符合实际的行人主动超越轨迹;Chen等[7]提出基于道路的距离-速度模型(lane-based distance-velocity,LDV)研究无信号人行横道人车交互,评估与私家车和出租车交互时行人过街的安全性;随着行人密度的增加,冲突数量逐渐增大[8];Alsaleh等[9]使用计算机视觉算法提取自行车和行人轨迹,建立混合交通(自行车和行人)互动的行为模型。Hatfield等[10]调查行人/骑自行车人在共用道路上的行为及态度,调查结果显示人们对空间所有权的认知存在问题。张蕊等[11]结合共同避让行为影响因素,建立多向行人共同避让行为仿真模型,为空间规划提供了理论支撑及方法依据。
综上,公交站点区域行人与非机动车冲突是一个急需处理的交通安全问题。目前在公交站点区域研究行人与非机动车冲突主要局限于同质行人与传统自行车或电动自行车某一车型的冲突,较少考虑含有激进型的行人与混合非机动车流的冲突;主要采用统计学方法研究人非冲突的特征、影响因素,在微观层面涉及较少。所以现将含有激进型的行人运动模型与非机动车运动模型耦合,建立公交站点区域行人与非机动车交互模型,采用微观仿真的方式研究行人与非机动车的交互过程,挖掘行人与非机动车冲突演化规律。
1 行人与非机动车交互模型构建
公交站点区域行人与非机动车交互场景如图1所示,由行人、非机动车、非机动车道、冲突区域及行人等候区组成,冲突区域位于非机动车道的中间位置,是二者发生交互的区域。
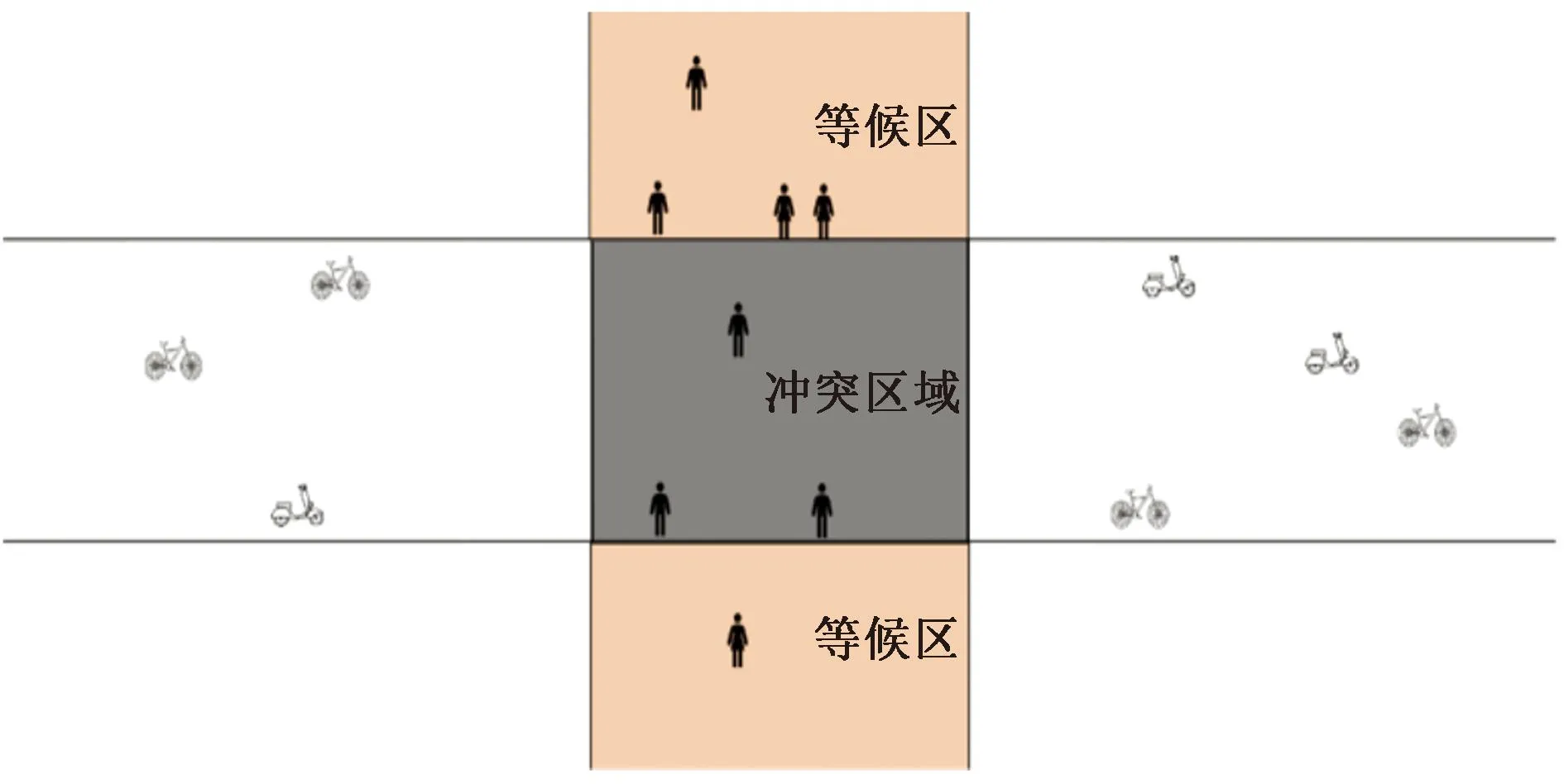
图1 公交站点区域行人与非机动车交互场景示意图Fig.1 Schematic diagram of the interaction scene between pedestrians and non-motor vehicles in the bus stop area
1.1 行人运动模型
采用双向行人Blue模型[12]模拟进出站行人运动。根据实际调查发现,部分激进型行人会加速穿越非机动车道。为更加真实的反映行人的运动行为,将行人运动模型分为正常速度运动模型和加速运动模型。模型相关符号说明如图2和表1所示,蓝色矩形代表行人,黑色箭头表示行人的运动方向,自下而上运动的行人为进站行人,自上而下运动的行人为出站行人。
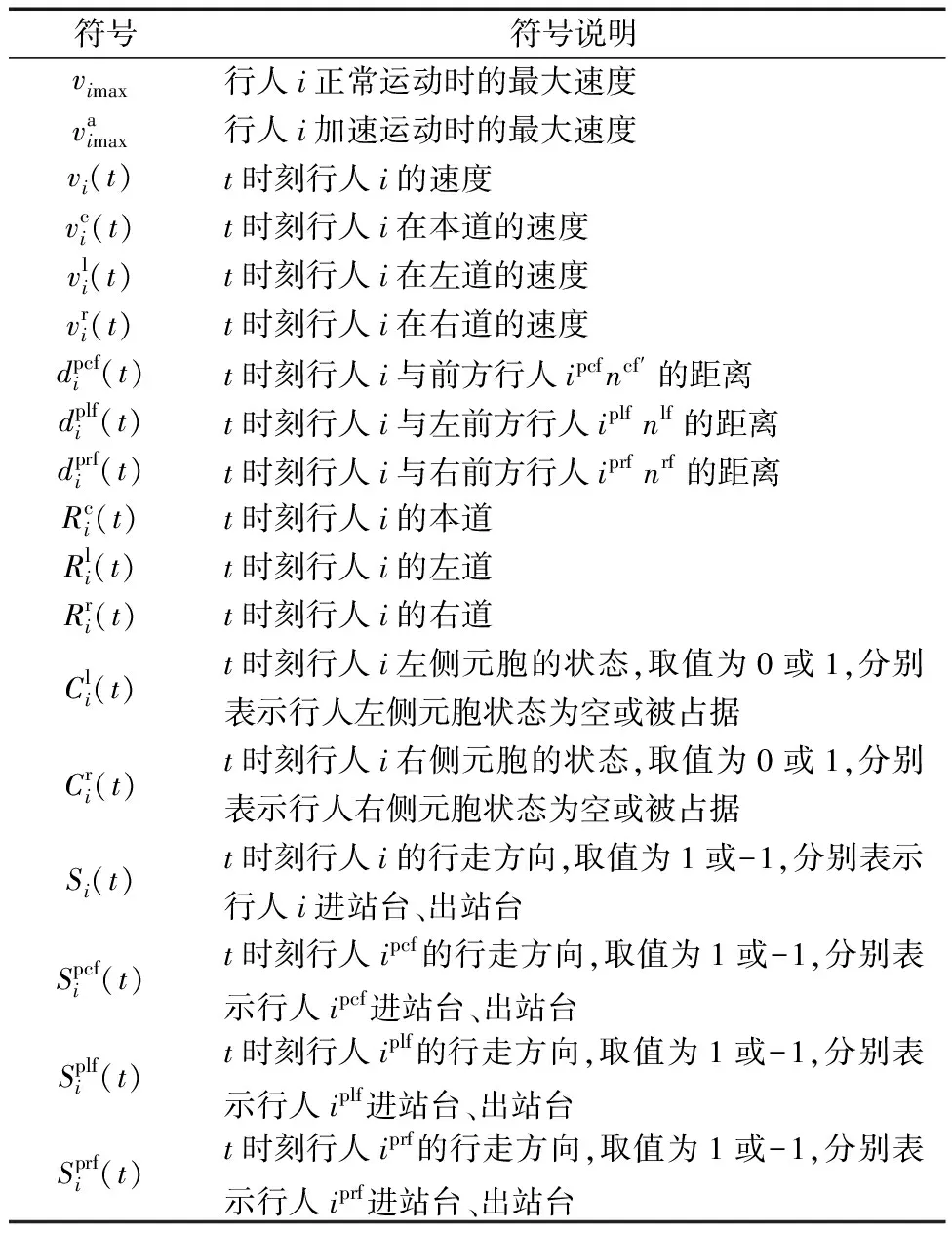
表1 行人运动模型相关符号说明Table 1 The notations of pedestrian movement model

图2 行人运动模型相关符号图示Fig.2 The schematic of pedestrian movement model notations
正常速度行人运动模型分为方向选择和向前运动两个过程。
1.1.1 方向选择

计算行人i在本道速度时,需要判断行人i与其前方行人的行走方向是否一致。若二者行走方向一致,二者之间的距离即为行人i下一时间步长在本道的速度;若二者行走方向相反,速度取二者距离的一半,并向下取整。行人i左道和右道速度计算方式一致,首先需要判断行人i能否向相邻左(右)道换道,若左(右)道不存在或左(右)道存在但行人i左(右)侧元胞被其他行人占据,则认为行人无法换道,下一时间步长行人i左(右)道速度为0。若行人i的左(右)道存在且相邻左(右)两侧为空元胞,则需根据行人i与其左(右)前方行人的行走方向进行判断。若二者方向相同,下一时间步长行人i在左(右)道的速度为行人与左(右)前方行人的距离;若二者方向相反,下一时间步长行人i在左(右)道的速度为行人与左(右)前方行人距离的一半,并向下取整。下一时间步长行人i在本道、左道和右道的速度计算公式如式(1)~式(3)所示。
比较行人i在3个方向上的速度,选择速度最大的作为下一时间步长的行走方向,其运算规则如下。

①行人在本、左、右3个方向速度一样,行人选择继续在本道行走,即

②行人在本道和相邻左道(或右道)达到的速度均为最大,行人选择继续在本道行走,即

③行人在相邻左道和相邻右道达到的速度均为最大,行人选择在左道、右道行走的概率分别为50%、50%,即

(1)
(2)
(3)

此外,若存在两名行人在同一时间步长期望占据同一元胞的情况,那么这两名行人占据该目标元胞的概率均为50%,一人移动到目标元胞,另一行人原地等待。若3名行人期望同时占据同一元胞,那么这3名行人均选择原地等待。
1.1.2 向前运动
(1)速度更新。行人i下一时间步长的运动速度为所选方向下一时间步长速度与行人i正常运动最大速度之间的最小值,即行人向前运动的速度更新公式为

(4)


(5)
1.2 非机动车运动模型
非机动车驾驶人在行驶过程中,都希望以最高速度行驶,以期在最短的时间内完成出行。因此,非机动车驾驶人为获得最高行驶速度,在行驶过程中会频繁地换道超车。考虑非机动车的换道超车行为,非机动车运动模型以NaSch模型[13]为基础,添加侧向移动规则,再现非机动车在行驶过程中的换道行为。若驾驶人在当前车道所能达到的速度小于其换道后可以行驶的速度,且能够满足换道的安全条件,那么驾驶人将选择换道以达到更大的行驶速度;否则将继续在当前车道行驶。
非机动车运动模型的相关符号说明如图3和表2所示。在该模型的每个时间步长内车辆位置通过以下4个连续步骤进行更新。
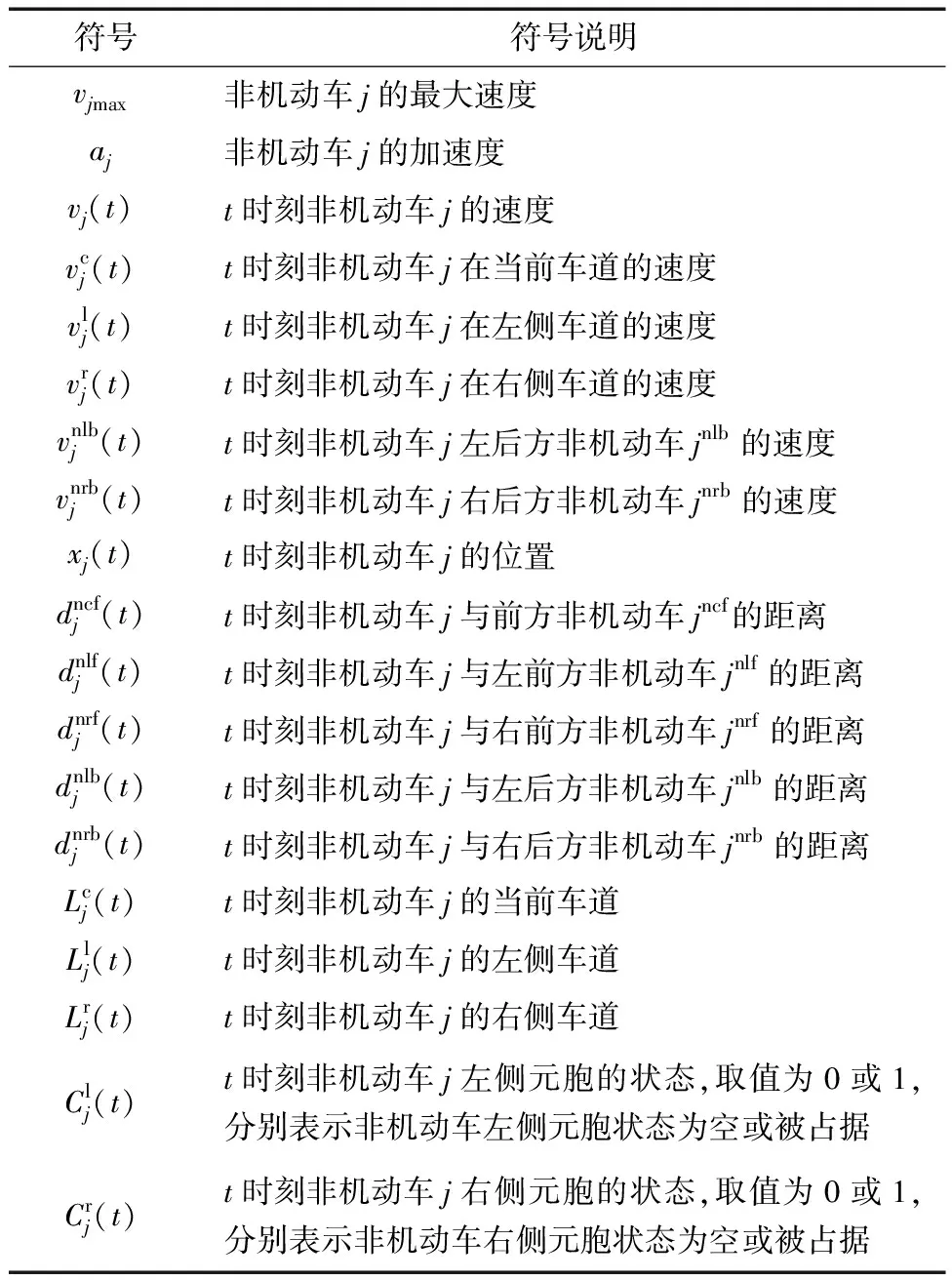
表2 非机动车运动模型相关符号说明Table 2 The notations of non-motor vehicle motion mode
图3 非机动车运动模型相关符号图示Fig.3 The schematic of non-motor vehicle motion model notations
步骤1加速。如果非机动车j的速度低于vjmax,并且与前面非机动车的距离大于vj(t)+aj,则以加速度aj加速,即
vj(t+1)=min[vj(t)+aj,vjmax]
(6)
步骤2减速。非机动车在行驶过程中,计算出在满足安全条件的情况下,下一时间步长非机动车j在当前车道及相邻左右两侧车道的速度,然后比较各车道速度大小,选择速度最大的车道作为行驶车道。为避免非机动车j与其前方非机动车发生碰撞,非机动车j当前车道的速度取值为车j当前速度和前方非机动车jncf距离的最小值。计算左(右)侧车道速度时,首先需要判断非机动车j是否满足换道条件,换道条件包括以下3点:车j左(右)车道存在;左(右)车道无并排非机动车;换道后不会与左(右)后方车辆发生碰撞。若无法满足以上3个换道条件,无法向左(右)侧车道换道,下一时间步长在左(右)侧车道速度为0;若满足换道条件,非机动车j左(右)侧车道速度取当前速度和非机动车j与左(右)前方非机动车距离的最小值。下一时间步长非机动车j在当前车道及其左右两侧车道的速度计算公式具体如式(7)~式(9)所示。
(7)
(8)
(9)
在确定非机动车j在当前车道以及左右两侧车道的速度后,比较各车道所能达到的最大速度,由此确定下一时间步长的行驶车道,其运算规则如下。



①非机动车在当前、左、右三车道速度一样,选择继续在当前车道行驶,即

②非机动车在当前车道和相邻车道之一达到的速度最大,选择继续在当前车道行驶,即

③非机动车在相邻左右两车道速度最大,选择在右车道行驶,即

步骤3随机慢化。如果非机动车不是静止不动的,会因路况、驾驶人心态等不确定因素进行减速,在一个时间步长非机动车以慢化概率P将速度减少1,即
vj(t+1)=max[vj(t+1)-1,0]
(10)
步骤4位置更新。非机动车以更新后的速度向前行驶,即
xj(t+1)=xj(t)+vj(t+1)
(11)
1.3 行人与非机动车交互规则
根据对西单商场公交站点区域现场考察分析发现,规避行为以行人主动驻足为主,非机动车被迫对过街行人实施避让。因此行人与非机动车交互主要根据穿越决策条件决定是穿越非机动车道还是在原地等待,非机动车则遵循避让规则判断需要对过街行人实施何种避让方式。公交站点区域行人穿越决策规则和非机动车避让规则共同构成了公交站点区域行人与非机动车交互规则。
公交站点区域行人穿越行为按照行人在非机动车道上的停驻次数可分为一次性穿越行为和非一次性穿越行为。为刻画行人这两种穿越行为,将公交站点区域行人穿越决策规则分为公交站点区域行人穿越决策规则Ⅰ和决策规则Ⅱ两种,分别刻画行人一次性完成穿越行为和行人非一次性完成穿越行为的决策过程。非机动车避让规则用来刻对穿越行人的避让过程。
1.3.1 公交站点区域行人穿越决策规则Ⅰ
一次性完成穿越行为的行人在即将进入冲突区域前需根据行人穿越可接受最小时间间隔判断是穿越非机动车道还是留在等候区等待。首先确定非机动车道上游首辆非机动车到达行人穿越路径的时间,然后比较其与行人穿越可接受最小时间间隔的大小。若非机动车到达时间大于行人正常穿越可接受最小时间间隔,即满足式(12),行人可以正常穿越非机动车道。若非机动车到达时间介于行人正常穿越可接受最小时间间隔与行人加速穿越可接受最小时间间隔之间,即满足式(13),激进型行人会切换至加速运动模式冒险穿越非机动车道,其他行人选择在等候区等待穿越。激进型进站行人比例(进站行人冒险穿越比例)为rp1,激进型出站行人比例(出站行人冒险穿越比例)为rp2。若式(12)和式(13)均不满足,行人只能在等候区等待穿越。
(12)
(13)

1.3.2 公交站点区域行人穿越决策规则Ⅱ

(14)
(15)

1.3.3 非机动车避让规则
非机动车避让规则在非机动车运动模型的基础上添加了对行人的避让规则,依旧包括加速、减速、随机慢化和位置更新4个步骤,具体差异主要表现在减速这一步骤。图4为模型规则相关符号图示。
箭头表示行人或非机动车的运动方向;为t时刻非机动车j与前方行人jpcf 的距离;为t时刻非机动车j与左前方行人jplf 的距离;为t时刻非机动车j与右前方行人jprf 的距离
首先计算下一时间步长非机动车在当前车道及其左右两侧车道的速度。为避免进入冲突区域的非机动车j与其前方行人发生碰撞,车j在当前车道速度取车j当前速度、车j与前方非机动车距离、车j与前方行人距离三者之间的最小值。若车j满足向左(右)换道条件,非机动车j左(右)侧车道速度取当前速度和非机动车j与左(右)前方被占元胞距离的最小值。下一时间步长非机动车j在当前车道及其左右两侧车道的速度计算公式如式(16)~式(18)所示。
然后比较各车道速度的大小,选择速度最大的车道作为下一时间步长的行驶车道。若存在多条车道速度相等的情况,优先选择当前车道,右侧车道次之,只有当左侧车道速度达到唯一最大值时,选择向左侧车道换道。
2 模型参数设置
2.1 环境参数
仿真场景按照沿机非隔离带设置的直线式公交停靠站建立,图5为公交站点区域行人与非机动车交互模型仿真场景。定义模型中每个元胞大小为0.5 m×0.5 m,非机动车道长为190个元胞,宽为8个元胞。人非冲突区域位于非机动车道第46~145个元胞,占据8×100个元胞。冲突区域上侧为站台等候区,下侧为路边等候区,每个等候区大小为4×100个元胞。
白色圆形表示进站行人,黑色圆形为出站行人,模型采取开放边界条件
2.2 行人参数
根据北京市西单商场公交站B站台实际调查结果,设置选择一次性穿越非机动车道的行人占全部行人的比例Pc=0.4。参考文献[13],行人交换位置概率Pe=0.5。
(16)
(17)
(18)
(1)行人的元胞尺寸。行人空间需求是指行人个体在静止不动或者动态行走过程中所需要的面积范围,参考余艳等[14]的设置,最终确定行人元胞尺寸为0.5 m×0.5 m,即每个行人占据一个元胞。
(2)行人步行速度。行人步行速度受多种因素影响,主要包括性别、年龄等。假设所有行人均是同质的。设定行人正常步行速度最大值为1.5 m/s(3 cell/s),考虑到存在激进型行人加速穿越非机动车道的情形,设置加速穿越非机动车道的行人最大步行速度为2 m/s(4 cell/s)。
(3)行人冒险穿越比例。行人冒险穿越比例即为激进型行人比例,表示选择加速穿越非机动车道行人的比例。根据对西单商场公交站点行人穿越行为调查结果,设置进站行人冒险穿越比例rp1=0.2,出站行人冒险穿越比例rp2=0.1。
(4)行人穿越可接受最小时间间隔。行人穿越可接受最小时间间隔分为行人正常穿越可接受最小时间间隔τ和行人加速穿越可接受最小时间间隔τa。借鉴向红艳等[15]对行人安全过街时间的研究,定义τ和τa计算公式分别如式(19)和式(20)所示。
(19)
(20)

(5)行人穿越安全距离。行人能够安全穿越的距离,分为行人正常穿越安全距离ds和行人加速穿越安全距离dsa。借鉴景超[16]提出的行人过街安全心理距离计算公式,定义行人穿越安全距离计算公式,见式(21)和式(22)。
(21)
(22)

2.3 非机动车参数
定义非机动车到达率为αn,根据现场实际调查结果,设置各类型非机动车占比为电动自行车∶传统自行车∶三轮车=14∶5∶1。借鉴NaSch模型中的加速规则,设置非机动车加速度为aj=1。参考文献[17],非机动车随机慢化概率p=0.3。
(1)非机动车元胞尺寸。目前中国常见的非机动车主要包括传统自行车、电动自行车和电动三轮车。共享单车车辆具体长宽分别在160~175 cm和55~60 cm。电动自行车实际长1.75 m左右,宽0.65 m左右。通过实地考察并在当地电动三轮车代销点进行尺寸统计发现,电动三轮车的具体长度在220~300 cm,具体宽度在90~120 cm。根据以上分析,定义传统自行车元胞尺寸为1 m×2 m(2×4个元胞),电动自行车尺寸为1 m×2 m(2×4个元胞),电动三轮车元胞尺寸为1.5 m×2.5 m(3×5个元胞)。
(2)非机动车速度。邝先验等[18]通过对非机动车调查发现,正向行驶传统自行车的最大速度为21 km/h,正向行驶电动自行车的最大速度为28 km/h。新交规规定电动三轮车行驶速度不能超过25 km/h。因此,设置传统自行车最大速度为6 m/s(12 cell/s),电动自行车最大速度为8 m/s(16 cell/s),电动三轮车最大速度为7 m/s(14 cell/s)。
3 行人与非机动车冲突演化规律分析
利用第1节建立的行人与非机动车交互模型仿真分析了在不同的行人和非机动车流量构成(即不同的行人与非机动车到达率)情况下,公交站点区域进出站行人与非机动车的干扰交互过程。从交通效率与安全两个方面入手,仿真分析进出站行人到达率、非机动车到达率对二者延误和冲突数的影响。系统仿真1个时间步长对应实际时间1 s,仿真时间设为8 000步(8 000 s),提取后2 000步的仿真数据。为减小随机性对结果的影响,系统进行10次仿真并取平均值。
3.1 时空图
行人与非机动车的运动轨迹可以用来表示行人或非机动车受对方干扰产生的运动变化。图6给出了不同交通流量构成下的非机动车横向时空轨迹图。图6(a)中进出站行人到达率、非机动车到达率均为0.5,此时行人和非机动车到达率较小,道路交通量较低,非机动车未发生明显的堵塞现象,因非机动车换道行为的存在,非机动车运动呈现由相对稳定到逐渐离散的过程。图6(b)中进出站行人到达率αp1=αp2=1,非机动车到达率αn=0.5,可以看出随着进出站行人数量的增加,非机动车开始出现堵塞现象,由于非机动车数量较少,且行人与非机动车交互主要以行人规避为主,行人流量的增加对非机动车运动的干扰并不显著,非机动车堵塞现象会很快消散。当进出站行人到达率αp1=αp2=0.5,非机动车到达率αn=1时,非机动车堵塞现象严重,如图6(c)所示,这是因为各类非机动车速度差异明显,且三轮车行驶占地空间大,随着非机动车流量的增大,车辆间的干扰增大。当行人、非机动车到达率都较大(αp1=αp2=αn=1)时,如图6(d)所示,行人和非机动车之间的干扰会加剧非机动车的拥堵,车辆在公交站点前会产生较长的排队现象。
图6 非机动车横向时空轨迹图Fig.6 Lateral space-time trajectory of non-motor vehicles
图7为不同交通流量构成下行人横向时空轨迹图。可以看出,随着行人和非机动车到达率的增加,行人的运动逐渐受限,换道行为减少,拥堵现象加剧。行人拥堵现象最先发生在行人与非机动车的开始交互处,这也解释了图6中非机动车的堵塞原因。
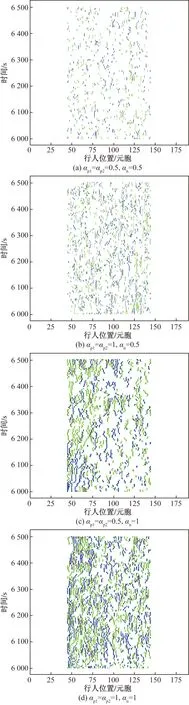
图7 行人横向时空轨迹图Fig.7 Transverse space-time trajectory map of pedestrians
3.2 对延误的影响
为研究行人运动方向对行人和非机动车延误的影响,控制进出站行人到达率之和为1,探讨进站行人比例对延误的影响。图8分别给出了非机动车到达率为0.1、0.5、1时,行人延误Dp与进站行人比例的关系图。
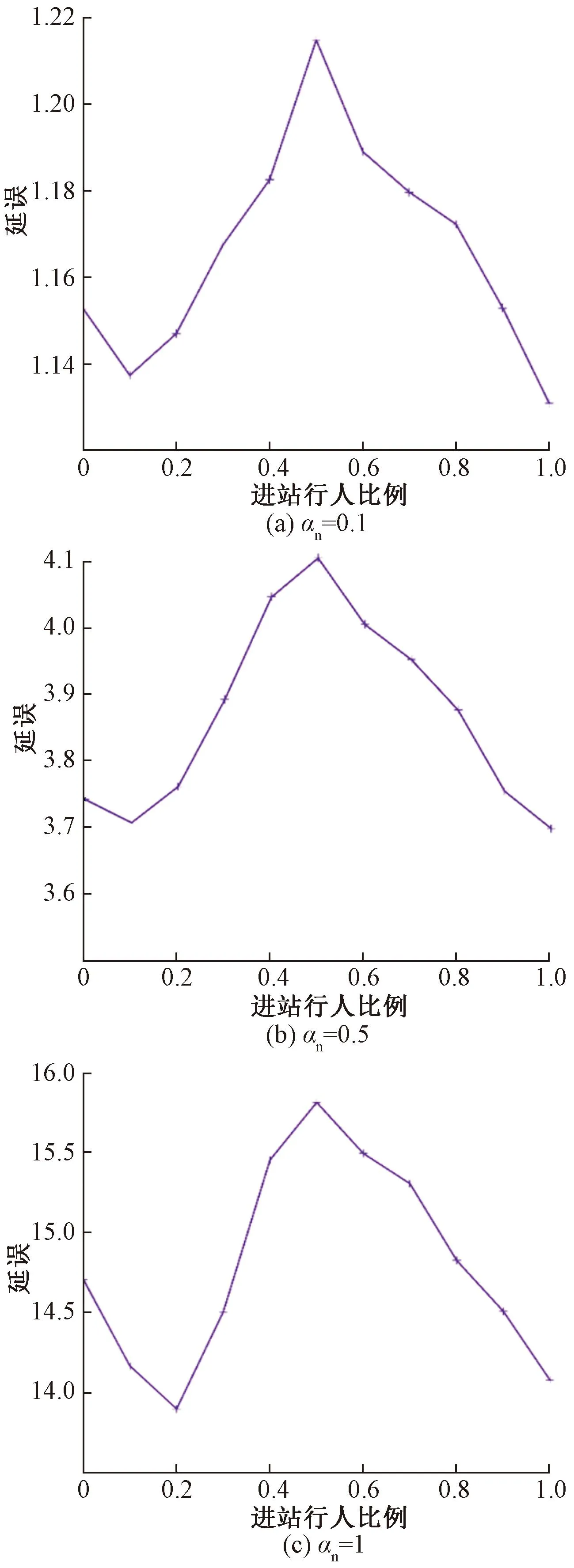
图8 行人延误与进站行人比例关系图Fig.8 The relationship between pedestrian delay and the proportion of pedestrians entering the bus stop
比较图8(a)~图8(c)发现,行人延误随着非机动车到达率的增大而增加,变化显著,受进站行人比例变化出现小范围波动。当非机动车到达率一定时,行人延误随着进站行人比例的增大表现为先减少后增加再减少的变化趋势。分析原因,当进站行人比例从0开始增大时,公交站点区域逐渐出现进站行人,因进站行人冒险穿越比例较大,行人延误减少;随着进站行人比例的增大,对向行走的行人增多,行人之间的干扰增强,行人延误增加,当进站行人比例为0.5时,行人延误达到峰值;随着进站行人比例从0.5进一步增大到1时,冒险穿越非机动车道的行人增多,对向行走的行人减少,行人延误减少。此外,可以发现进站行人比例为1时,行人延误比进站行人比例为0时的延误小,同样是由进站行人冒险穿越比例更大引起的。
图9(a)~图9(c)为非机动车到达率为0.1、0.5、1时,非机动延误Dn与进站行人比例的关系图。比较发现,与进站行人比例相比,非机动车延误受非机动车到达率的影响更加显著,当非机动车到达率一定时,非机动车延误随进站行人比例增大呈现先增加后减少的变化趋势。这是因为当进站行人比例从0增大到0.5时,对向行人之间的干扰增强,行人在非机动车道上行走的时间延长,与非机动车发生冲突的概率变大,从而导致非机动车延误增加。同理,当进站行人比例从0.5增大到1时,行人延误减少导致在非机动车道上行人的行走时间缩短,因此非机动车延误减少。此外,可以发现进站行人比例为1时,非机动车延误比进站行人比例为0时的延误小。
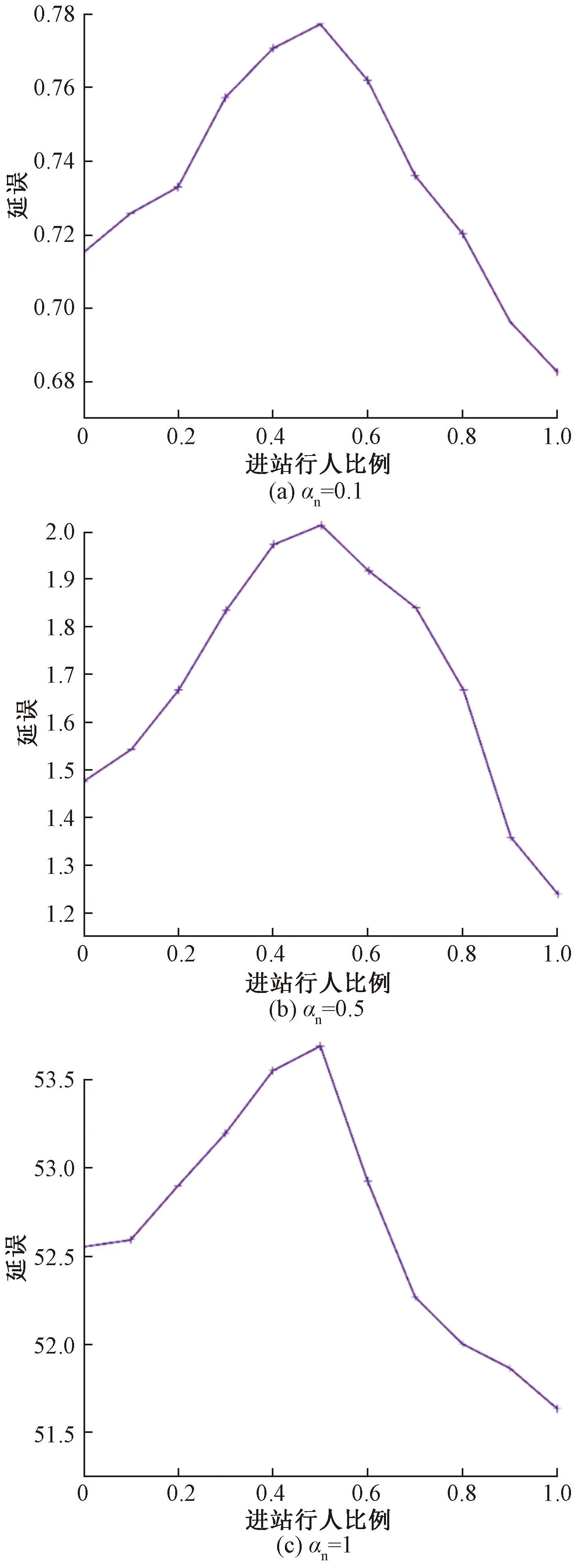
图9 非机动延误与进站行人比例关系图Fig.9 The relationship between non-motorized delay and the proportion of pedestrians entering the bus stop
3.3 对冲突数的影响
为定量分析行人与非机动车冲突对交通安全的影响,设置进出站行人到达率一致,仿真分析了行人、非机动车到达率对行人与非机动车冲突数Nc的影响。在2 000 s中取30 s进行冲突数分析,nc(t)为t时刻发生的人非冲突数,Nc的计算公式为
(23)
图10为不同进出站行人到达率下,冲突数Nc与非机动车到达率αn的关系图。可以看出,当进出站行人到达率一定时,行人与非机动车冲突数随着αn的增大而增加,当行人到达率较小(αp1=αp2=0.2)时,冲突数呈现缓慢增长的趋势,随着行人到达率的增大,冲突数增长率呈现先增大后减小的趋势,这是因为随着行人和非机动车的增多,道路复杂程度显著提升,人车冲突明显,当非机动车到达率达到一定程度时,道路出现堵塞现象,部分行人或非机动车出现排队等待现象,从而造成冲突数增长率降低。
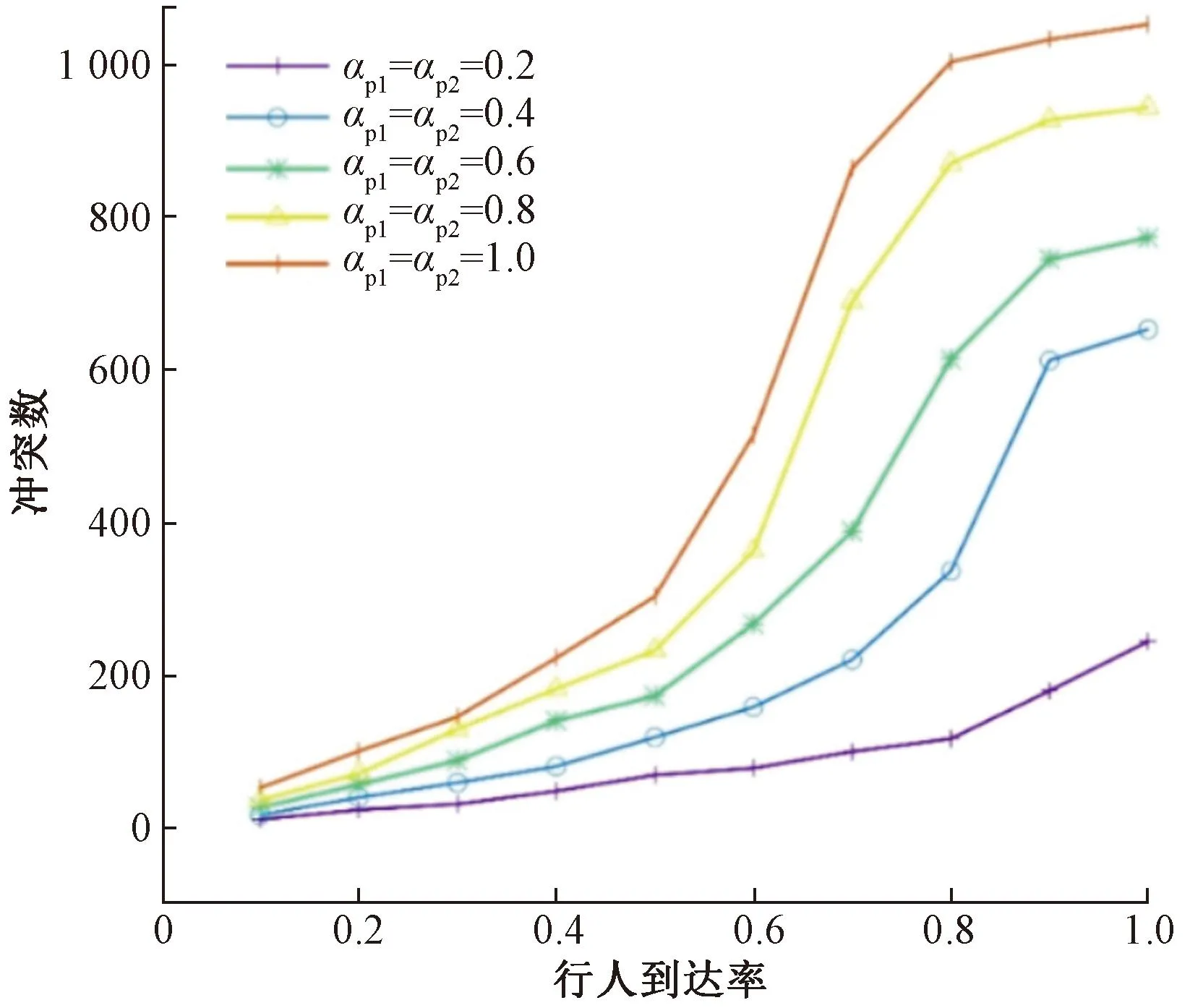
图10 冲突数与行人、非机动车到达率关系图Fig.10 The relationship between the number of conflicts and the arrival rate of pedestrians and non-motor vehicles
4 结论
建立沿机非隔离带设置的公交站点区域行人与非机动车交互模型,考虑激进型行人和混合非机动车溜,再现了进出站行人与过往非机动车的交互过程,能更加直观地剖析公交站点行人与非机动车冲突的症结点,为公交站点区域的交通管理和规划设计提供实用、科学的方法,对解决公交站点区域行人与非机动车混合交通问题具有重要的理论价值和现实意义。
分析了在不同的流量构成下二者冲突的演化规律以及进出站行人到达率、非机动车到达率对延误和冲突数的影响,得到以下结论。
(1)与进出站行人到达率相比,行人、非机动车延误受非机动车到达率变化更加显著。进站行人比例为1时,行人延误、非机动车延误比进站行人比例为0时的延误小。
(2)当行人到达率一定时,行人与非机动车冲突数随着αn的增大而增加,行人到达率较小时,冲突数呈现缓慢增长的趋势,随着行人到达率的增大,冲突数增长率呈现先增大后减小的趋势。能够反应公交站点区域行人与非机动车的交互特点。
未来研究方向是:细化非机动车驾驶人和行人的运动行为,考虑年龄、性别等多因素对行人与非机动车冲突行为的影响。进一步扩大调查取样范围,设定多样的取样地点,以便全面总结人车冲突特点,完善适用条件。
猜你喜欢
世界家苑(2020年5期)2020-06-15 11:13:34
哈尔滨师范大学自然科学学报(2020年6期)2020-05-13 07:59:08
铁道通信信号(2019年9期)2019-11-25 01:44:50
智富时代(2018年5期)2018-07-18 17:52:04
祖国(2018年6期)2018-06-27 10:27:26
阅读(科学探秘)(2018年8期)2018-05-14 10:06:29
北京测绘(2016年2期)2016-01-24 02:28:28
黄冈职业技术学院学报(2015年5期)2015-03-27 21:34:14
中国航海(2014年1期)2014-05-09 07:54:25
交通运输研究(2014年24期)2014-04-16 01:38:45