基于车速平稳过渡的高速公路出口限速方案
2024-02-20 09:57:32徐婷胡闪闪陈亦新芮飞马金凤
科学技术与工程 2024年1期
徐婷, 胡闪闪, 陈亦新, 芮飞, 马金凤
(长安大学运输工程学院, 西安 710064)
高速公路出口区域是交通事故的高发区[1-2]。高速公路出口主线限速高于匝道限速,车速波动剧烈,当限速差过大或剩余变速车道长度不足时,易导致主线到出口的短时速度突变或防止错过出口的急减速行为,车速突变是引发出口追尾事故的主因[3-5]。众多研究表明:在出口区域逐级设置限速对提高高速公路出口的交通安全很有必要。
高速公路出口逐级限速策略中,不同规范及研究学者对相邻限速区间的限速差有不同结论。目前中国公路限速方案大多以20 km/h为限速步长,部分研究中出现以30 km/h或10 km/h为限速步长的方案。《道路交通标志和标线》(GB 5768.5—2017)限制速度(第5部分)规定[6],高速公路和城市快速路的主线和匝道的限速差不宜超过30 km/h,《公路项目安全性评价规范》(JTG B05—2015)[7]和国内公路事故资料的大量研究[8],建议相邻路段运行速度差的平稳值不应超过20 km/h。宋泽武[9]考虑驾驶员的可操作性和限速次数不超过3次的原则。张志伟等[10]采用筛选、迭代分析法优化限速值。薛长龙等[11]基于驾驶人昼夜制动特性和视觉特性确定了限速值的计算方法,均建议限速差设置为20 km/h。林莉[12]研究六车道高速公路不同车道设置梯级限速值的方案,将车道限速差分别设为20、30、40、50 km/h,建议限速差值宜不超过30 km/h。张卫华等[13]研究了高速公路可变限速诱导策略,给出以10 km/h为梯度的分段限速方案,且指出当高速公路可变限速预告板设置间距大于分段限速中多段长度之和时,应考虑20 km/h的限速梯度。
围绕着驾驶员对于限速标志的视认过程以及限速标志设置条件等方面,不同规范及研究学者对不同限速值的限速区长度展开研究。《道路交通标志和标线》(GB 5768.5—2017)限制速度(第5部分)中[6]给出限速值在30~110 km/h及110 km/h以上的限速区最小长度参考值为0.3~10 km。学者们在进行限速区长度研究中,主要从驾驶员的角度出发。考虑驾驶员的视认特征,李瑞[14]基于驾驶人生理、心理稳定距离、限速标志前置距离及过渡距离的最小要求,确定了不同限速值所需满足的最小限速区段长度;程国柱等[15]构建驾驶人视认距离模型及限速标志前置距离模型,发现作业区上游限速标志昼夜设置间距随限速值的增大而增大;亓鑫[16]细化限制速度在100~120 km/h限速区间长度,给出限制速度在110 km/h及120 km/h时高速公路限速区间最小长度建议值为4.6 km以及5.0 km;杨雅钧等[17]依据驾驶人视认距离、限速标志设置前置距离和驾驶人心理稳定距离,标定计算模型中的限速区间最小长度。考虑驾驶员的记忆特征,徐婷等[18]给出了高速公路限速标志的合理设置间距为运行速度的10倍。
目前中国对于逐级限速方案的研究,高速公路限速值大多以20 km/h为步长,限速差值较大时易受限速次数不宜过多的限制;限速区长度的研究主要围绕驾驶员对于交通标志的视认特征和记忆特征展开,在既定限速值下计算或调整限速区长度,未明确分级限速的限速区长度计算模型;另外,高速公路出口车辆减速行为复杂、安全性不高,国内尚没有一套具体翔实的针对出口区域逐级设置限速标志的方法。
鉴于此,现针对高速公路出口的车辆减速行驶的安全性问题,研究出口区域合理的逐级限速方案,利用UC-win/road进行驾驶模拟试验,研究驾驶员对相邻限速标志的认知反应,建立连续限速标志间距计算模型,确定连续限速标志设置位置,弥补中国高速公路出口限速标志设置理论的不足。
1 驾驶模拟试验设计与数据采集
1.1 逐级限速方案设计
目前中国高速公路的主线设计速度最高为120 km/h,工程中常见较低的匝道设计速度为40 km/h。《公路路线设计规范》(JTG D20—2017)中将减速车道设置类型分为平行式和直接式,并规定变速车道为单车道时,减速车道宜采用直接式。根据中国各地区出口匝道类型统计数据,单车道直接式减速车道类型占比为74.3%,具有较好的代表性[9]。因此,以主线设计速度120 km/h、匝道设计速度40 km/h 、双向四车道、单车道直接式的高速公路互通立交为研究对象。
高速公路出口匝道设计逐级限速方案时,主要考虑限速值、限速值步长、限速次数、限速标志位置等因素。相关规范及研究表明[6, 15]:限速值步长应为10 km/h的整倍数且不应超过30 km/h,限速次数不宜超过5次,因此限速步长多以20 km/h为主。主要研究5种常见的逐级限速方案在出口的适用情况,如表1所示。
1.2 试验设备
驾驶模拟试验所用软件为日本FORUM8公司开发的UC-win/Road软件,是一款具有地形输入、道路生成、道路附属物生成、交通流生成、模拟驾驶和结果输出等功能的三维虚拟现实软件。驾驶模拟试验所用的硬件为三台屏幕、一台主机以及驾驶舱,具备驾驶过程所需功能,如图1所示。

图1 驾驶模拟器Fig.1 Driving simulator
1.3 被试人员
共招募20名被试人员,年龄在20~40岁(平均年龄:男性28.7岁,女性29.6岁),驾龄在1~8年(平均驾龄:男性7.5年,女性6.2年),男女比例3∶1,性别比例和年龄分布均符合中国驾驶员统计特征[19-21]。
1.4 试验场景
道路场景:根据《公路路线设计规范》(JTG D20—2017)[22]设计道路场景,主线道路采用双车道整体式路基横断面,匝道道路横断面采用Ⅰ型单车道横断面,试验道路设计为6 km的双向四车道,出口匝道设置在距离起点5 km处。道路最终效果如图2所示,参数如表2所示。

图2 道路最终效果图Fig.2 Final rendering of the road
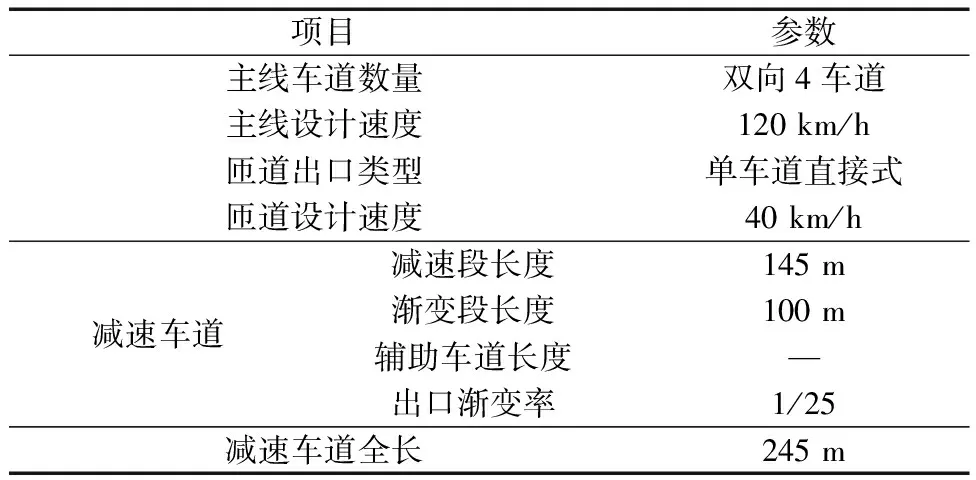
表2 试验场景参数设置Table 2 Experimental scene parameter settings
交通流场景:驾驶模拟所采用的交通量、大型车比例、车辆驶出匝道比例分别取600 pcu/(h·ln)、3/10、20%[9],其中,pcu/(h·ln)为交通服务量的单位,pcu(passenger car unit)表示标准车当量数,h(hour)表示时间,ln(lane)表示车道;标定小型车期望速度为100~120 km/h,大型车期望速度为90~110 km/h。
标志设置:驾驶模拟场景中的相关标志采用PS软件根据《公路限速标志设计规范》(JTG/T 3381-02—2020)[23]自主创建。高速公路主线起点下游100 m处设置120 km/h限速标志、渐变段起点上游100 m设100 km/h限速标志、渐变段起点设80、90 km/h限速标志、减速段起点设立60 km/h限速标志、减速段终点即分流鼻处设立40 km/h限速标志,如图3所示。
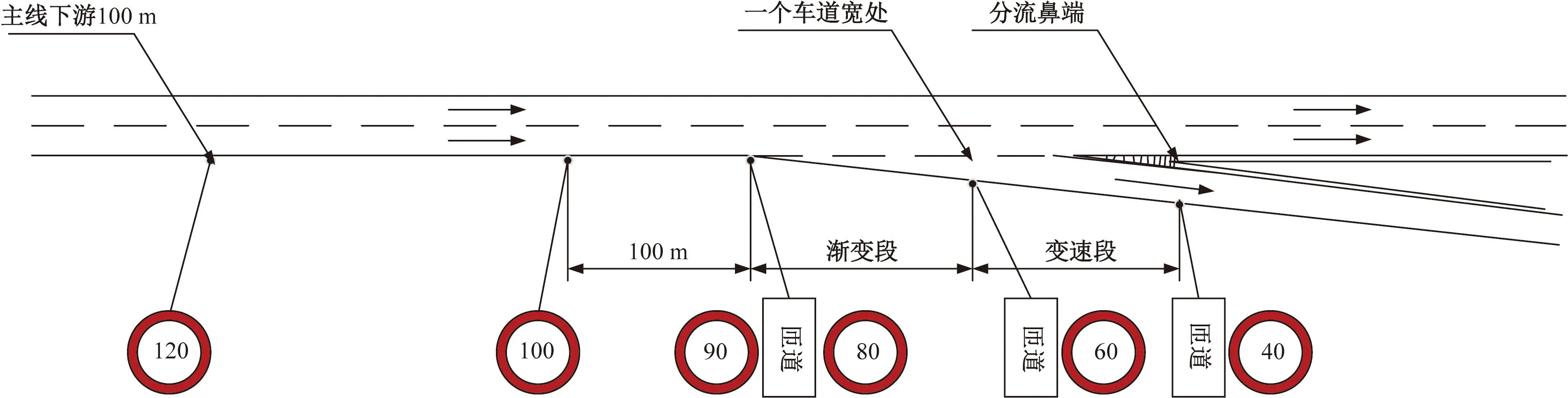
图3 限速标志设置图Fig.3 Speed limit sign setting diagram
1.5 试验方案
首先,告知被试人员试验相关流程及注意事项,签订试验保密协议;其次,工作人员帮助被试人员在非实验路段进行20 min的模拟驾驶,确保被试人员能够熟练操作驾驶模拟器;然后,进入正式试验,所有被试人员依次完成5个场景的驾驶模拟试验;最后,模拟系统采集试验数据,试验结束后整理数据。
1.6 驾驶模拟试验验证
为了验证驾驶模拟试验的可靠性,将驾驶模拟试验数据与真实路段获取的数据进行对比。验证的核心思想为对比道路和交通环境相似的驾驶模拟数据与真实路段的实车数据。为使对比试验更具说服力,选择匝道影响区内的特征断面处的车辆速度和减速度作为判别指标[24-25],5个特征断面如下:横断面Ⅰ为减速车道渐变段起点上游30 m处、横断面Ⅱ为减速车道渐变段起点、横断面Ⅲ为减速段起点,横断面Ⅳ为分流点,横断面Ⅴ为分流鼻处。
真实路段选取主线限速为120 km/h、出口匝道限速为40 km/h、双向4车道、单车道直接式、二级限速的高速互通立交,在UC-win/road驾驶模拟软件中建立与实际场景相同的驾驶模拟场景。20位被试人员分别在驾驶模拟器和真实路段进行试验,利用无人机采集真实路段实验车辆的运行数据,获取模拟车数据和无人机视频,进一步利用tracker软件处理交通流视频以提取实车数据。
表3即为实车和模拟车辆的平均速度和平均减速度变化情况。分析了分流鼻端上游320 m处的车辆数据,发现两种场景下车辆在5个横断面处的平均速度、平均减速度的相对误差均在5%以内,验证了驾驶模拟数据的有效性,进一步说明所搭建的驾驶模拟场景的合理性,可以进行后续研究。

表3 实际与驾驶模拟场景数据对比分析Table 3 Comparative analysis of data from actual and driving simulation scenarios
2 连续限速标志间距计算模型
高速公路限速区长度计算主要从驾驶员角度出发,以驾驶员认知反应为基础,计算驾驶员的视认距离和心理稳定行驶距离、限速标志前置距离[15,17,26-27],从而计算各限速值下的限速区最小长度。但在以往的研究中,均将每一个限速标志认知反应定义为一个单独的过程,并未与相邻限速标志认知反应过程建立联系。研究限速标志间距计算模型时仍以驾驶员认知反应为基础,但考虑驾驶人对相邻限速标志的信息处理机制、加入减速度预测模型和限速标志影响模型,针对驾驶员认知反应过程的不同阶段,利用车辆运动学公式计算相邻限速标间距。连续限速标志的设置间距模型应满足:相邻限速标志间距≥限速标志前置距离+缓冲距离+视认距离。
逐级限速方案为:设定车辆初始速度为120 km/h,出口车速为40 km/h。对逐级限速方案中相邻的限速标志进行标定,如图4所示,以100 km/h和80 km/h的限速标志为例,AB段驾驶员读取限速标志,为制动准备阶段,包括反应时间、换脚、踩下制动踏板的时间,一般为1.3 s;BC段为制动过渡阶段,减速度线性变化,一般为0.3 s;CE段为平稳制动阶段,车辆将做匀减速运动,即a2=a3;构建相邻限速标志间距计算模型,以减速段终点40 km/h限速值(强制限制速度)为基点,以此推算与前一个限速标志的距离。相邻限速标志中,前一个制动完成点至下一标志读取开始点的距离(如EA′、E′A″)是让驾驶员对信息进行获取、接受和处理,此阶段车辆仍以上一阶段减速度(a3=abuffer1)做匀减速运动,一般为2 s;与EA′、E′A″不同,缓冲距离E″A‴内驾驶员还需要对车速、信息的传输速度、信息容量进行考虑,使车辆在制动完成点速度降至40 km/h;因此将此段距离称为缓冲距离,并纳入模型的计算中。

图4 逐级限速标定图Fig.4 Calibration diagram of the step-by-step speed limit scheme
因此连续限速标志间距计算模型如下。
(1)100-80 km/h限速标志间距。

(1)
(2)(80、90)-60 km/h限速标志间距。

(2)
(3)60-40 km/h限速标志间距。

(3)
式中:L为相邻限速标志间距,m;V为各阶段速度,km/h;a为各阶段车辆减速度,m/s2;S为驾驶员面对限速标志的视认距离,m。3个模型中涉及前后车速、减速度不同,缓冲距离和视认距离不同,L计算结果不同,如表4所示。

表4 不同车速下限速标志的视认距离Table 4 Visual recognition distance of speed limit signs at different speeds
驾驶员的视认距离主要由限速标志中的数字高度及驾驶员视角而确定,表达式为
(4)
式(4)中:h为限速标志中的数字字高,cm;i为驾驶员视角,(°),建议取值15分。
相关文献证明,在既定的交通环境及道路环境下,车辆通过高速公路出口时,驾驶员所采取的减速度主要与初速度及限速值大小有关,即车辆到达C点的减速度与车辆初始速度及D点的限速值大小相关。因此,构建平稳制动阶段的减速度预测模型为
a=mV0+nVg+p
(5)
式(5)中:a为车辆减速度,m/s2;V0为车辆初速度,km/h;Vg为限速标志的限速值,km/h;m、n、p为减速度预测模型的常规参数。
逐级限速方案中应考虑限速标志对车辆运行速度的影响。根据Anders Brodin与Arne Carlsson对限速标志下不同车辆的初速度及驾驶特性分析证明,自由流状态下,驾驶人在经过限速标志时的车速变化可用式(6)表示,即为制动完成点的限速标志模型。
(6)
式(6)中:VT为限速区域内的车辆速度,km/h;V0为限速区域上游的车辆速度,km/h;Vg为限速标志的限速值,km/h;c、d为限速标志影响模型的常规参数。
根据驾驶模拟试验相关数据对减速度预测模型和限速标志影响模型进行标定。
平稳制动阶段的减速度预测模型为:a=0.026 77V0-0.028 84Vg+0.560 5。
限速标志影响模型为:VT=V0(1+3.218 8×0.022 5z2)-1,z=Vg(V0)-1。
3 模型求解与结果评价
3.1 模型求解
一级限速方案(无过渡):根据驾驶模拟试验中车辆运行状态分析,无论40 km/h限速标志如何设置,都无法满足驾驶员从主线驶出匝道的安全性,因此不再计算。
二级限速方案(120-60-40 km/h):以60 km/h限速标志牌上游端视认距离处的85%位车速及减速度为V0和a0,取V0=101.6 km/h和a0=0.78 m/s2(V0和a0的取值随限速标志位置而动态变化,无法确定,选取驾驶模拟试验中的取值仅为计算示例),联合模型中的公式得到V0‴=63.85 km/h,60 km/h限速标志处车速为V3″=85.41 km/h,SA‴D‴=76.30 m,60 km/h与40 km/h限速标志间距:L60-40=156.39 m,根据工程经验取整为160 m。
三级限速方案1(120-80-60-40 km/h):最危险状态即所需减速距离最长,因此假设车辆在制动开始点之前减速度为0 m/s2。以最高速度120 km/h为初速度,计算各阶段长度,发现LD″E″+Lbuffer3=-50.14 m,分析是由于车辆在C″点的速度(V2=56.64 km/h)已小于车辆在视认距离内减速到40 km/h的A‴点速度,因此在L2、L3、L4已无需减速。但为了驾驶员在60 km/h限速标志上游不受40 km/h限速标志干扰,设置60 km/h与40 km/h的限速标志间距为40 km/h限速标志的视认距离即76.3 m,取80 m;80 km/h与60 km/h限速标志间距为298.14 m,取300 m。
三级限速方案2(120-90-60-40 km/h):计算原理与三级限速方案1相同,可得90 km/h与60 km/h限速标志间距为299.46 m,取300 m;60 km/h与40 km/h限速标志间距为81.44 m,取85 m。
四级限速方案(120-100-80-60-40 km/h):可得100 km/h和80 km/h限速标志间距为293.97 m,取295 m,80 km/h与60 km/h限速标志间距为157.71 m,取160 m;60 km/h与40 km/h限速标志间距为77.83 m,取80 m。
根据模型求解可知各级方案的限速标志设置结果如图5所示。其中方案1仅在分流鼻端设置40 km/h限速标志。
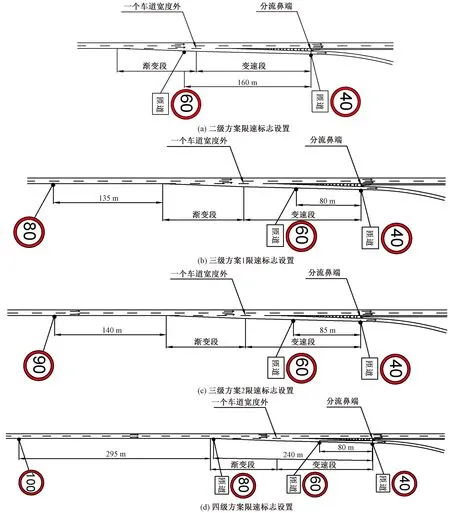
图5 各级方案限速标志设置结果Fig.5 Result of setting speed limit signs for various levels of schemes
3.2 结果分析与评价
根据模型计算结果,在驾驶模拟场景中布设限速标志的位置,进行5组驾驶模拟试验。依据高速公路出口处交通环境的特殊性构建了安全评价指标体系,选取6个具有表征的断面(Ⅰ断面为渐变段起点上游300 m处、Ⅱ断面为渐变段起点上游200 m处、Ⅲ断面为渐变段起点上游100 m处、Ⅳ断面为渐变段起点、Ⅴ断面为减速段起点,Ⅵ断面为减速车道终点,即5 100 m处)来提取车速,以6个断面的车速离散性(车速标准差、第85%位车速(V85)与第15%位车速(V15)的差值(V85-V15)、分流鼻运行速度V85及断面划分的5个路段的平均减速度为评价指标,基于CRITIC-TOPSIS对指标值原始矩阵进行了权重计算,得到各方案正理想解的相对接近度。
3.2.1 安全评价指标分析
对5组驾驶模拟试验中6个断面的20位驾驶员的车辆速度、减速度进行提取及处理,数据如表5所示。
根据各级限速方案在特征断面的车速标准差和V85-V15逐指标数据,分析车辆离散性变化。在自由流状态下,车速离散性的主要影响因素是驾驶员行为特性。相邻限速标志计算模型以驾驶员认知反应为基础,确定了限速标志具体位置,有效规范了驾驶员的行为特性。如图6和图7所示,随着限速级数增加,各断面的车速标准差及V85-V15逐渐减小,车辆离散幅度显著降低,表明建立模型后逐级限速方案对出口匝道车辆速度有明显管控效果。
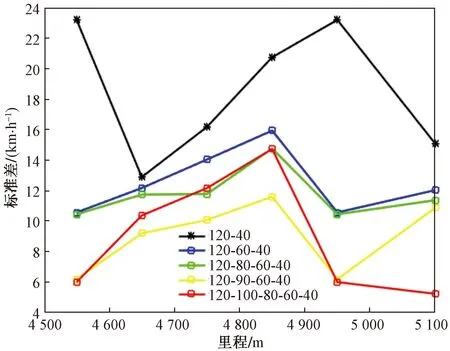
图6 各级方案断面车速标准差Fig.6 Standard deviation of vehicle speeds for various scenario sections
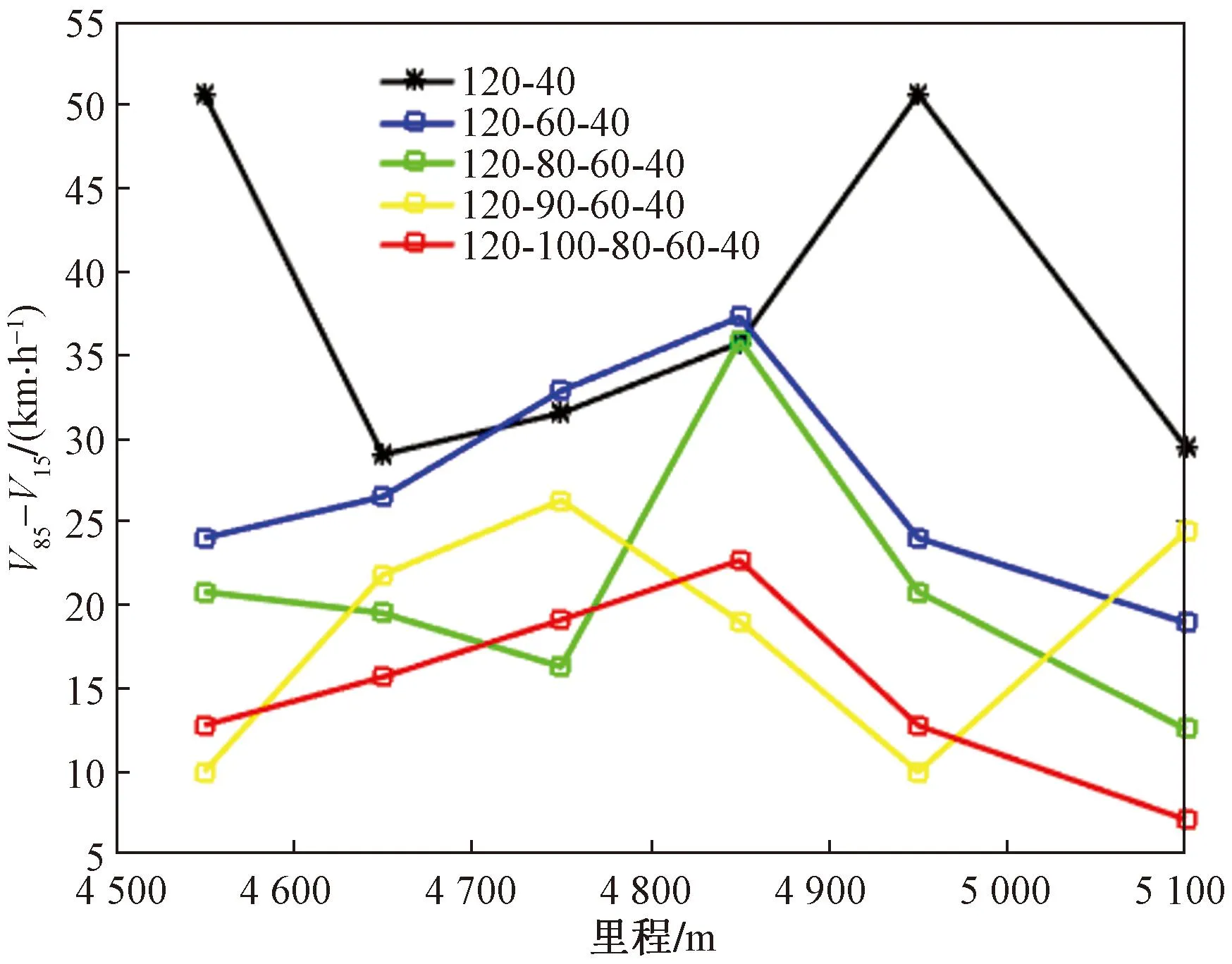
图7 各级方案断面V85-V15Fig.7 Programme cross-sections at all levels V85-V15
图8为各方案分流鼻运行速度V85,一级限速方案分流鼻运行速度最低,是驾驶员在车速较高时看见40 km/h限速标志急剧减速造成的;二级、三级及四级限速方案分流鼻运行速度相差不超过5 km,无法用单一指标去判断其安全性,需综合各项指标进行评价。

图8 各级方案分流鼻运行速度Fig.8 Speed of shunt nose operation for each level of the programme
《公路项目安全性评价规范》(JTG B05—2015)[7]中推荐的纵向加速度取值范围是0.15~0.5 m/s2,但没有对加速度和减速度进行明确规定,根据相关文献对汽车减速度舒适性的研究,修订后阈值的具体范围如表6所示。

表6 减速度阈值表Table 6 Table of deceleration thresholds
如图9所示,各级方案在各断面的平均减速度分布在0~1.4 m/s2,可知除一级限速方案外,二级、三级和四级方案的平均减速度小于1.3 m/s2,均在驾驶员舒适性阈值内,进一步验证了相邻限速区长度计算模型的有效性。此外,四级方案(限速步长均为20 km/h)的平均减速度变化幅度很平顺,分流鼻端平均减速度最小,减速过程最平稳。

图9 各级方案路段平均减速度Fig.9 Average deceleration of road sections at all levels
3.2.2 CRITIC-TOPSIS综合评价
建立多目标决策矩阵。基于驾驶模拟试验,提取6个断面处20位驾驶员的车辆的速度;对各方案各指标值建立原始矩阵,并进行标准化处理。获取指标权重。基于CRITIC利用各指标之间的对比强度及其冲突性,计算出各指标标准差,获取各指标相关系数,以求得权重矩阵。计算欧式距离与相对接近度。利用标准化矩阵和权重矩阵构造决策矩阵表,计算正负想理解,公式为
(7)
计算每个方案与正、负理解之间的欧式距离,公式为
(8)
计算相对接近度,公式为
(9)
相对接近度越小表示该设置方案与正理想解越接近、与负理想解越远,即表示该方案就越好。最终结果如表7所示。
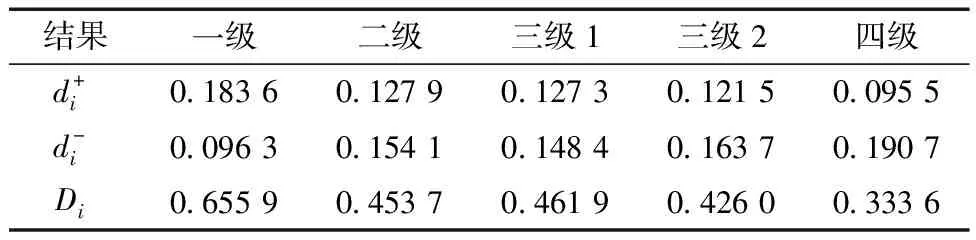
表7 各方案欧式距离及相对接近度Table 7 Euclidean distances and relative proximity for each scenario
根据相对接近度越小方案越好的原则,逐级限速方案的优劣性排序为:四级>三级2>二级>三级1>一级,则最优设置方案为四级限速方案,综合评价结果与指标分析结果变化趋势一致;各逐级限速方案的限速标志设置间距经定量计算后,驾驶安全性、舒适性都有所提高;另外,出现三级方案1劣于二级方案的情况,分析是由于三级方案1中80 km/h的限速标志设立于4 725 m处,与主线速度相差40 km/h,导致区间减速度过大,进一步验证了《公路限速标志设计规范》(JTGT 3381-02—2020)规定互通式立交出口相邻限速值之差不宜超过30 km/h的有效性。
4 结论
(1)研究基于车速平稳过渡的高速公路出口逐级限速方案,考虑驾驶员对相邻限速标志的认知反应,构建了连续限速标志设置间距计算模型,建立了高速公路出口不同级别的限速方案,利用驾驶模拟试验完成模型的验证,选取车速离散性、分流鼻运行速度V85、平均减速度等代表性指标对限速方案进行分析和综合评价。研究结果对出口车速平稳过渡和安全提升有重要意义,可为交通部门制定高速公路出口的限速方案提供理论支持。
(2)提出的连续限速标志间距计算模型,区别于已有研究中专注于驾驶员对单独限速标志的认知反应,考虑驾驶人对相邻限速标志的信息处理机制、加入减速度预测模型和限速标志影响模型,还将相邻认知反应间距(缓冲距离)融入限速标志间距的计算中。模型确定了逐级限速方案的限速标志具体位置,有效规范了驾驶员的行为特性。
(3)根据模型计算结果:二级限速方案中,限速值为60-40 km/h的限速标志间距为160 m;三级限速方案中,限速值为80-60-40 km/h的限速标志间距分别为300 m和80 m,限速值为90-60-40 km/h的限速标志间距分别为300 m和85 m;四级限速方案中,限速值为100-80-60-40 km/h的限速标志间距分别为295、160、80 m。
(4)利用驾驶模拟器检验模型计算结果,试验结果表示:逐级限速方案的平均减速度指标小于1.3 m/s2,均在驾驶舒适性阈值内;随着限速级数增加,车辆离散幅度显著降低,表明逐级限速方案对出口车辆运行速度有明显管控效果;其中,四级限速方案中分流鼻端车速标准差、平均减速度、V85-V15分别控制在5.23 km/h、0.52 m/s2、7.13 km/h左右,极大了满足车速平稳过渡要求。根据CRITIC-TOPSIS综合评价结果,研究出适用于本研究场景的最优逐级限速方案为四级限速(120-100-80-60-40 km/h)。
(5)构建的连续限速标志间距计算模型,通过定量优化限速标志距离,形成了控制高速公路出口车速平稳过渡的逐级限速方案,可为交通部门制定出口的限速方案提供理论支持。但中国高速公路出口类型及交通环境复杂,只研究了其中一种出口类型及特定交通环境,后续可以该研究结果为基础,进一步研究其他类型和交通环境的高速公路出口的限速方案。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
体育教学(2022年4期)2022-05-05 21:26:58
汽车实用技术(2022年4期)2022-03-07 06:07:20
启蒙(3-7岁)(2019年5期)2019-06-27 07:24:50
漫画月刊·哈版(2019年4期)2019-04-18 16:22:32
汽车维护与修理(2018年1期)2018-04-04 01:13:22
公民与法治(2016年4期)2016-05-17 04:09:26
中国卫生(2015年10期)2015-11-10 03:14:20
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33