基于局部密度聚类的雷达目标散射中心区域分割
2024-02-20 09:56:32胡承鑫曾曙光管灵董纯柱曾祥云郑胜黄瑶罗骁域
科学技术与工程 2024年1期
胡承鑫, 曾曙光*, 管灵, 董纯柱, 曾祥云, 郑胜, 黄瑶, 罗骁域
(1.三峡大学天文与空间科学研究中心, 宜昌 443002; 2.三峡大学理学院, 宜昌 443002;3.北京环境特性研究所, 北京 100854)
工作在高频区的雷达目标的后向回波可以认为是由有限个强散射源相干合成的结果,这些强散射源通常等效为目标的散射中心[1-2]。目标的散射中心主要产生于目标的边缘、拐角、棱角及尖端等不连续点部位,代表了目标精细的物理结构。在实际应用中,散射中心并不是局限为“点”,那些边缘的绕射、开口的腔体的反射都可以作为散射中心处理[2]。作为描述目标高频散射机理的有效特征,散射中心参数提取在雷达目标识别,RCS外推拟合,目标三维重构等军事领域具有广泛的研究应用价值[3-5]。
目前,人们主要采用近似最大似然(approximate maximum likelihood, AML)等方法来估计散射中心参数[6-8]。这些参数估计方法具有较高的精度,思想直观易于理解,但会面临高维非线性的混合参数最优化问题,计算复杂度极大[1]。在高分辨率SAR图像上,目标的散射中心对应于能量集中且相互分离的块状区域,这使得提取目标散射中心信息转化为对各种块状区域的处理[7]。首先,利用图像分割算法可得到峰值较高的若干感兴趣(region of interest, ROI)区域,然后对各ROI区域分别进行散射中心参数估计。这种“区域解耦”的思想,可以大大提高散射中心参数估计速度[7-10]。但在实际情况中SAR图像很难具有足够高的分辨率,因此传统图像分割算法很难分割出只包含一个散射中心的区域,在雷达目标散射中心区域分割的正确率有待提高[8]。
聚类分析是一种无监督的分类方法,作为数据处理的技术,聚类分析现已在图像分割等领域取得了不错的效果。Rodriguez等[11]于2014年提出的密度峰值聚类(density peak clustering, DPC)算法是一种粒度计算模型,不仅在学术界引发了剧烈反响,同时也吸引了大量科研工作者对该算法的研究[12-15]。DPC算法的核心思想是刻画聚类中心。该算法认为聚类中心同时具有两个特点:一是聚类中心被局部密度较低的数据点包围;二是聚类中心与其他局部密度更高的数据点的距离较大[11-12]。张力丹等[13]通过自适应选取敏感参数截止距离将改进的DPC算法应用于图像分割。Luo等[15]改进DPC算法并提出局部密度聚类(local density clustering, LDC)算法以适应灰度图像,结合强度信息重新定义数据点密度和引入的梯度确定聚类的边界,在分子云核检测中取得较好效果。
为了改善传统图像分割算法对雷达目标散射中心区域分割的正确率有待提高的问题,拟采用LDC算法进行改善。首先对雷达图像进行Frost滤波、LSM图像分割和面积滤波的一系列图像预处理获得目标ROI区域,然后对预处理后的图像利用LDC算法检测散射中心并进行区域分割。将传统图像分割算法与LDC算法在模拟数据和真实数据上展开对比实验,以验证所提方法的优越性,快速且准确地实现雷达目标散射中心的区域分割。
1 雷达目标散射中心区域分割算法
1.1 LDC算法原理
LDC算法是一种基于像素点之间局部密度、距离和梯度的聚类算法[15]。算法首先计算每个点的3个参数:局部密度ρ、距离δ和梯度∇。
对于第i个数据点Ti的局部密度ρi定义为
(1)
对于第i个数据点Ti的距离δi定义为
(2)
对于第i个数据点Ti的梯度∇i定义为
(3)
式中:dc为截止距离;dij为数据点Ti与数据点Tj之间的欧式距离;Ij为数据点Tj处的强度。
如图1所示,计算完3个参数后,将距离δ与密度ρ之间的关系绘制成图,称为决策图。图1(a)是具有10个散射中心的仿真数据,其中,散射中心由Omega-K雷达成像算法[16]仿真生成,背景为高斯噪声;图1(b)是检测到的散射中心,分别用红色点和蓝色椭圆标识各散射中心和对应区域;图1(c)是决策图,用圆圈标记检测到的散射中心。δ0和ρ0是LDC算法的超参数,其中δ0表示两个散射中心之间的最小距离,ρ0表示候选散射中心区域的最小峰值强度值。
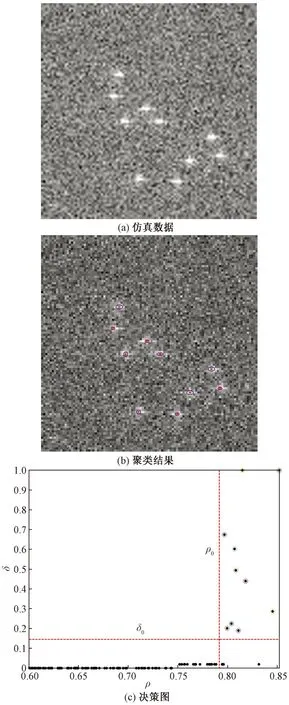
图1 算法示例Fig.1 Algorithm example
LDC算法认为聚类中心应同时具有两个特点:一是聚类中心被局部密度较低的数据点包围;二是聚类中心与其他局部密度更高的数据点的距离较大。因此,只有具有较高密度ρ和较大距离δ的数据点才是聚类中心[11,15]。决策图能够直观反映距离δ与密度ρ之间的关系,因此根据决策图可以确定聚类中心的位置和数量。然后根据密度ρ和梯度∇将非聚类中心点划分到距离该点最近的聚类中心中,从而确定单个散射中心区域Ck,最后使用形态学图像处理来填充检测到的区域之间的孔洞并平滑其边界。

(4)
1.2 基于LDC算法的雷达目标散射中心区域分割方法
雷达成像系统是基于相干原理的,因此在雷达回波信号中,相邻像素点的灰度值会由于相干性而产生一些围绕着某一均值而进行的随机变化,使得SAR图像中不可避免地存在噪声[17]。因此在进行LDC检测前,需要对原始图像进行一系列图像预处理,整个算法流程图如图2所示。

图2 算法流程图Fig.2 Algorithm flow chart
算法的实现步骤如下。
步骤1对原始观测图像W1(MSTAR官方数据集)进行Frost滤波实现图像全局噪声抑制[18]得到图像W2。原始观测图像W1如图3(a)所示,Frost滤波的结果图像W2如图3(b)所示。
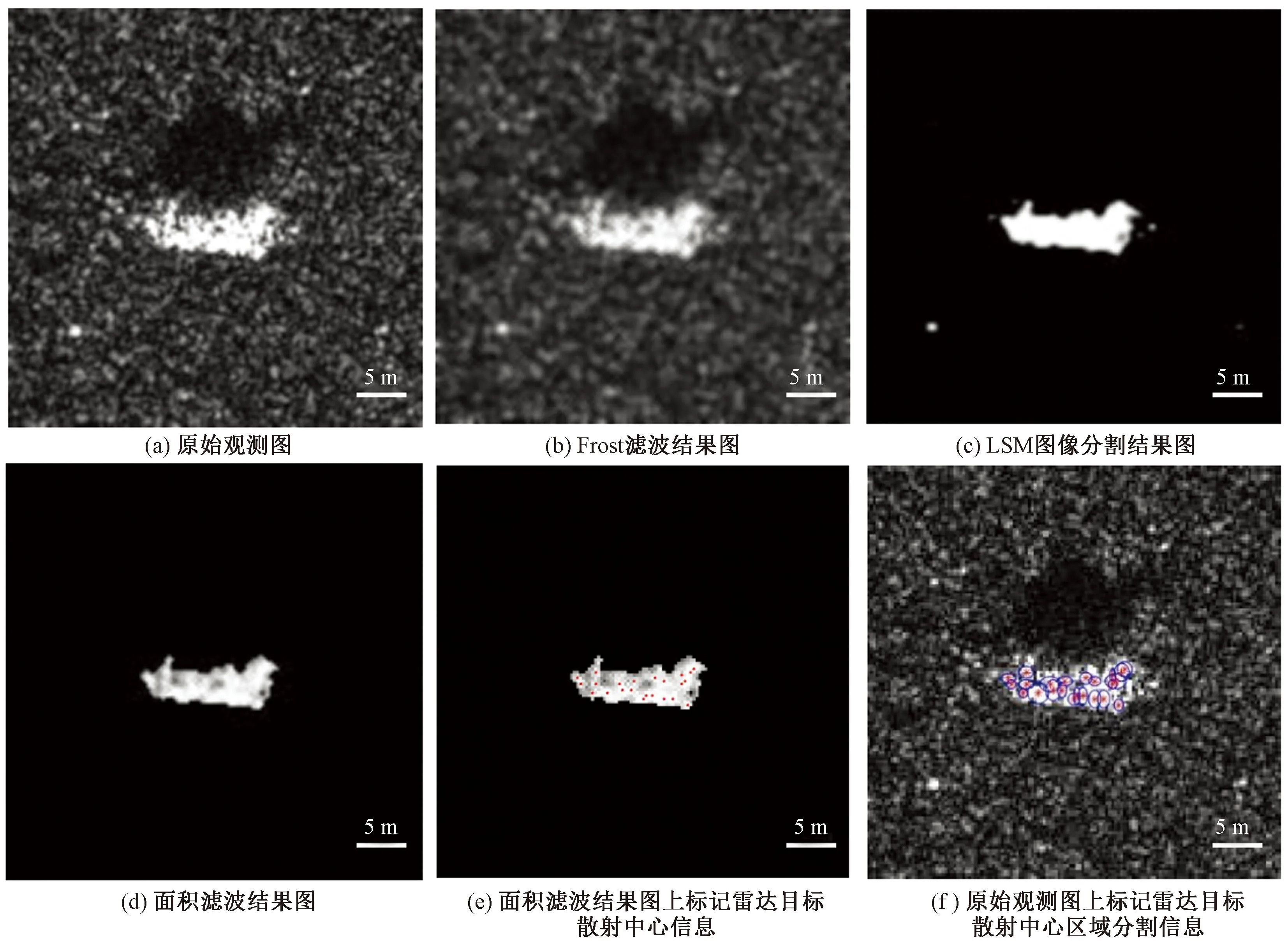
图3 基于LDC算法的雷达目标散射中心区域分割流程Fig.3 The process of radar target scattering center area segmentation based on LDC algorithm
步骤2基于水平集方法[19](level set method, LSM)对图像W2进行图像分割(简称LSM图像分割),初步获取疑似目标ROI区域。LSM图像分割的结果图像W3如图3(c)所示。
步骤3对图像W3采用面积滤波,保留最大连通域去除干扰目标,得到目标ROI区域。面积滤波的结果图像W4如图3(d)所示。
步骤4最后利用LDC算法检测出图像W4中的散射中心并进行区域分割。将散射中心标记到图像W4上得到图像W5如图3(e)所示,将散射中心和区域分割信息标记到图像W1上得到图像W6如图3(f)所示。
2 实验和分析
2.1 实验数据
利用Omega-K雷达成像算法生成仿真数据,然后从真实数据库(MSTAR数据集)中提取出噪声背景,添加到仿真数据上,得到合成数据。图4给出了仿真数据、合成数据和真实数据示意图。其中,图4(a)和图4(b)是由Omega-K雷达成像算法生成的仿真数据;图4(c)和图4(d)是从MSTAR官方数据集选取的真实数据;图4(e)和图4(f)是从真实数据上提取出来的噪声背景;图4(g)和图4(h)分别是信噪比分别为44.43 dB和33.69 dB的合成数据。
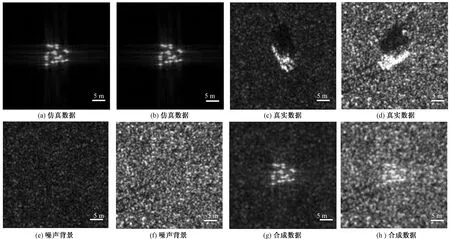
图4 实验数据Fig.4 Experimental data
信噪比的定义是信号的均值Usig与背景的标准偏差Vbg之间的比值,其公式为
(5)
接下来,采用LDC算法和传统图像分割算法在仿真数据、合成数据和真实数据上展开数值实验。
2.2 模拟数据实验
利用Omega-K雷达成像算法批量仿真200张SAR图像作为仿真数据样本。每张SAR图像散射中心数量在20~30,各散射中心随机分布在图像中心附近。仿真数据由于没有添加噪声,可直接利用LDC算法检测其散射中心。
图5是利用LDC算法对仿真数据检测的案例。其中,图5(a)是仿真数据,用红色点标记散射中心位置,作为验证信息;图5(b)是LDC检测结果,分别用红色点和蓝色椭圆标识各散射中心和对应区域。仿真数据虽然没有噪声的影响,但是也会出现漏检误检,典型案例如图6所示。

图5 仿真数据检测案例Fig.5 Simulation data detection case
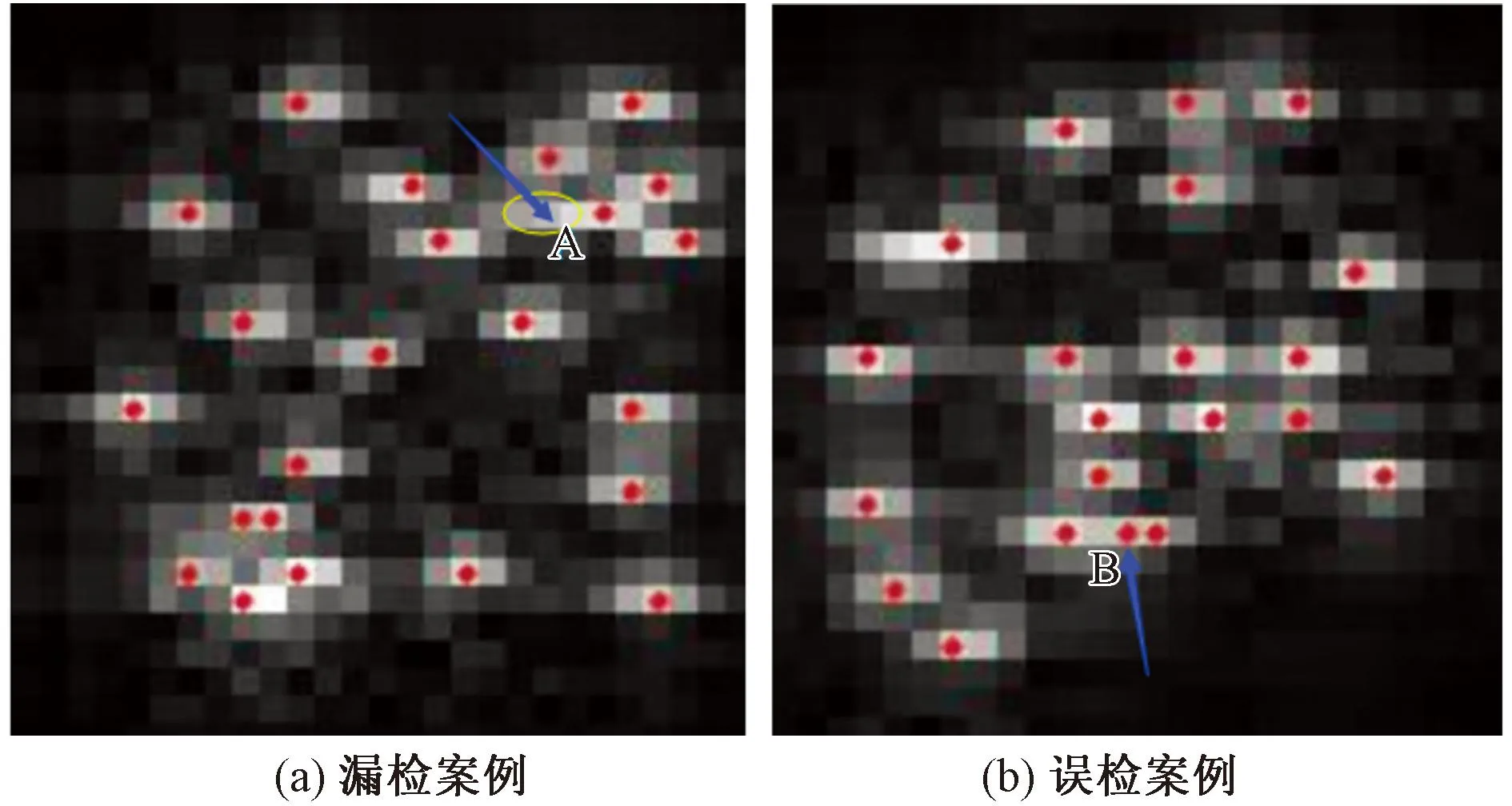
图6 仿真数据漏检误检案例Fig.6 Simulated data miss and false detection cases
图6是仿真数据漏检误检案例。其中,图6(a)是漏检案例,对照仿真数据的验证信息确认黄色圆圈内部蓝色箭头所指的点A是一个漏检测的散射中心,从图中不难看出A点四周存在多个强散射中心,其旁瓣的叠加使得A点周围的梯度很小,从而导致LDC的漏检;图6(b)是误检案例,对照仿真数据的验证信息确认蓝色箭头所指的点B是一个误检测的散射中心,可以看到B点左右两边有两个强散射中心,其旁瓣的叠加使得B点处形成一个有梯度的小峰,从而导致LDC的误检。
算法性能的评价指标准确率P、召回率R和综合得分F1的具体公式分别为
(6)
式(6)中:M1为算法检测正确的数量;M为仿真数据生成的数量;N为算法检测总的数量。
将算法检测到的位置信息与仿真数据的位置信息进行匹配,当位置误差在2个像素点以内时,认为检测正确。P和R分别体现了算法检测准确性和完备性,F1体现了的综合表现能力。
分水岭算法作为一种模拟降水过程将图像划分为若干区域的图像分割算法,由于其实现过程简单且结果有效,经常用于雷达目标散射中心区域分割[7-10]。大津法(OTSU)是一种确定图像二值化分割阈值的算法,又称最大类间方差法,由于其计算简单且不受图像亮度的影响,广泛应用于图像分割[20]。
利用Omega-K雷达成像算法批量仿真200张SAR图像作为仿真数据样本。然后,对仿真数据添加不同程度的噪声背景,得到平均信噪比为44.22 dB和33.48 dB的两批合成数据。分别对仿真数据和两批合成数据(统称模拟数据)进行算法性能测试,计算每张图像的准确率P、召回率R和综合得分F1,再求平均值得到算法评价指标。将LDC算法检测的结果与传统图像分割算法的结果进行对比,如表1所示。
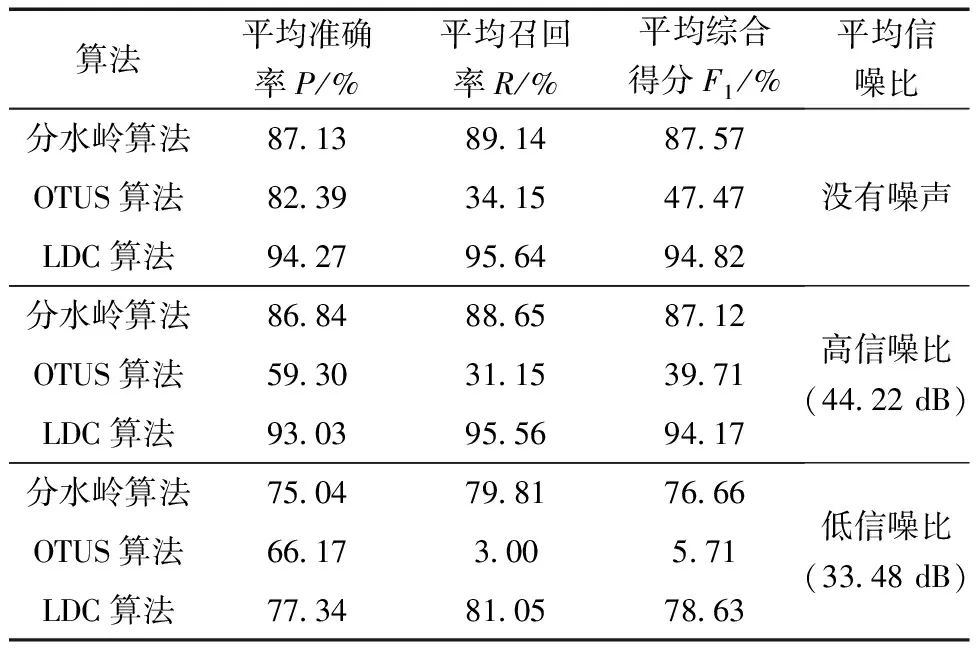
表1 模拟数据算法性能对比Table 1 Algorithm performance comparison of simulation data
表1清晰显示了在不同信噪比的情况下,不同算法的检测能力。在没有噪声或高信噪比(44.22 dB)时,LDC算法的平均准确率P、召回率R和综合得分F1均能达到93%以上;分水岭算法的评价指标只能达到86%以上;OTUS算法的评价指标更低。低信噪比(33.48 dB)时,人眼也较难分辨目标区域。此时先对雷达图像进行Frost滤波、LSM图像分割和面积滤波的一系列图像预处理获得目标ROI区域,再进行算法性能测试。从表1中看到在信噪比较低时,3种算法的评价指标均有明显降低,LDC算法的评价指标依然最高。由此可见,本文方法对于模拟不同信噪比下的数据,可以更有效地检测雷达目标的散射中心并进行区域分割。
2.3 真实数据实验
从MSTAR官方数据集中选取的T-72型A04变体实测数据进行实验。真实数据的信噪比差异较大,这里统一先对真实雷达图像进行Frost滤波、LSM图像分割和面积滤波的一系列图像预处理获得目标ROI区域,再利用LDC算法检测散射中心并进行区域分割。由于真实数据没有标准检测结果作为验证,只能通过人眼主观判断,将检测结果分为正确检测,明显漏检测,明显误检测三类。下面展示LDC算法测试中三类典型案例并做具体分析。
图7是真实数据检测结果的典型案例。其中,图7(a)是正确检测的案例,可以看到标记结果在ROI区域。图7(b)是明显漏检的案例,明显看到ROI区域有一部分没有检测到,造成这一现象的原因是在进行图像预处理时,LSM图像分割算法将ROI区域分为了两个部分,后面再经过面积滤波去除了面积较小的那一部分,最后导致LDC检测出现明显漏检。图7(c)是明显误检的案例,明显看到部分噪声背景被检测为目标,造成这一现象的原因是样本信噪比太低,滤波不完全,使得后续LSM图像分割将部分噪声背景判定为ROI区域,最后导致LDC检测出现明显误检。

图7 真实数据检测案例Fig.7 Real data detection cases
为了充分测试算法性能,以MSTAR官方数据集的T-72型A04变体实测数据为例进行批量实验。分别对LDC算法和传统图像分割进行批量测试,结果如表2所示。

表2 真实数据算法性能对比Table 2 Algorithm performance comparison of real data
从表2中可以看到,在真实数据的检测中LDC算法正确检测的比例在90%以上;分水岭算法正确检测的比例只有81.94%;OTUS算法会出现大量的漏检,算法虽然可以自动计算分割阈值,但是很难实现雷达图像的“区域解耦”。由此可见,相较于传统图像分割算法,LDC算法在真实数据中的检测能力也具有较高的优越性。
3 结论
提出了一种基于LDC算法的雷达目标散射中心区域分割的方法。首先,对雷达图像进行Frost滤波、LSM图像分割和面积滤波的一系列图像预处理获得目标ROI区域,再利用LDC算法检测出散射中心并进行区域分割。采用模拟数据和真实数据对本文方法和传统图像分割算法展开了数值实验。结果表明,对于没有添加噪声或高信噪(44.22 dB)的模拟数据,LDC算法的平均准确率P、召回率R和综合得分F1均能达到93%以上;对于真实数据,LDC算法正确检测的比例高于90%,均明显优于传统方法。实验结果验证了所提方法的有效性和优越性,可以快速且准确地实现雷达目标散射中心的区域分割,为后续的散射中心的参数估计提供技术支撑。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
波谱学杂志(2021年3期)2021-09-07 10:10:06
产业与科技论坛(2019年13期)2019-03-20 13:46:15
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
经济研究导刊(2016年32期)2017-04-06 17:10:42
火控雷达技术(2016年3期)2016-02-06 02:30:26
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29 12:53:22
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18