伤员运载机器人楼梯环境运动稳定性
2024-02-20 09:56纪兆俊李艳杰卜春光郎智明佟福奇
科学技术与工程 2024年1期
纪兆俊, 李艳杰*, 卜春光, 郎智明, 佟福奇
(1.沈阳理工大学机械工程学院, 沈阳 110159; 2.中国科学院沈阳自动化研究所机器人学国家重点实验室, 沈阳 110016;3.中国科学院机器人与智能制造创新研究院, 沈阳 110169)
随着机器人技术的不断发展,机器人越来越多地代替人类来完成一些危险作业任务,各类特种机器人不断发展,对性能的需求也在日益增长[1]。结构稳定问题是安全与经济的主要问题之一[2]。机器人自主爬楼梯的稳定性是伤员运载工作的一项重要指标。机器人在遇到楼梯、台阶等复杂地形时,没有做好从普通运动模式到越障模式之间的切换,连续翻越楼梯或台阶难免会产生颠簸、姿态不稳定等问题[3]。若在运载伤员的过程中稳定性无法保证,发生倾覆、翻转等危险行为,那么对伤员造成的危险后果是无法想象的。
机器人的运动稳定性问题对于机器人的运动安全意义重大。多年来,也有不少学者对机器人的运动稳定性进行了研究。夏建强等[4]通过零力矩点动态稳定判据方法,针对双臂护理机器人抱举运动的重心稳定性进行了稳定性分析。郝亮超等[5]分析康复机器人的重心位置,对康复机器人的倾覆问题进行校核判断,验证了康复机器人的结构科学性。但上述研究中所研究的机器人关节自由度都相对较少,且运动环境相对简单。
现提出一种针对伤员运载机器人的运动稳定性判定方法,结合质心位置与构型姿态,为伤员运载机器人的各越障阶段搭建对应的稳定锥模型[6],通过稳定锥判定理论制定伤员运载机器人的重心稳定衡量方法[7-8],该方法服务于运载机器人上楼梯时的重心稳定性分析,为运载机器人的安全、稳定的工作提供理论支撑。
1 伤员运载机器人结构
目前爬楼机器人有多种类型,它们在功能与实用性上各有优劣[9]。研究对象是中国科学院沈阳自动化研究所研制的伤员运载机器人,如图1所示。

图1 伤员运载机器人实体图Fig.1 Physical diagram of a casualty carrying robot
该机器人底盘部分为履腿复合式结构,底盘通过可移动滑台连接上方的可变形式担架。伤员运载机器人搭载的可变形式担架主要有“担架式”和“椅式”两种极限形态和一些中间形态。所研究的伤员运载过程中的重心调整问题,主要是通过可移动滑台的前后移动与可变形式担架的姿态变化对机器人的重心进行调整。
2 伤员运载机器人质心运动学建模
2.1 建立全局坐标系
得益于机器人结构的对称性,在机器人上楼梯这一场景下,可将问题考虑为一个二维问题。为伤员运载机器人建立坐标系如图2所示,不考虑图2中的垂直纸面方向。设置基础直角坐标系XOY1,及局部坐标系XOY2和XOY3,通过x、y坐标来描述位姿信息。
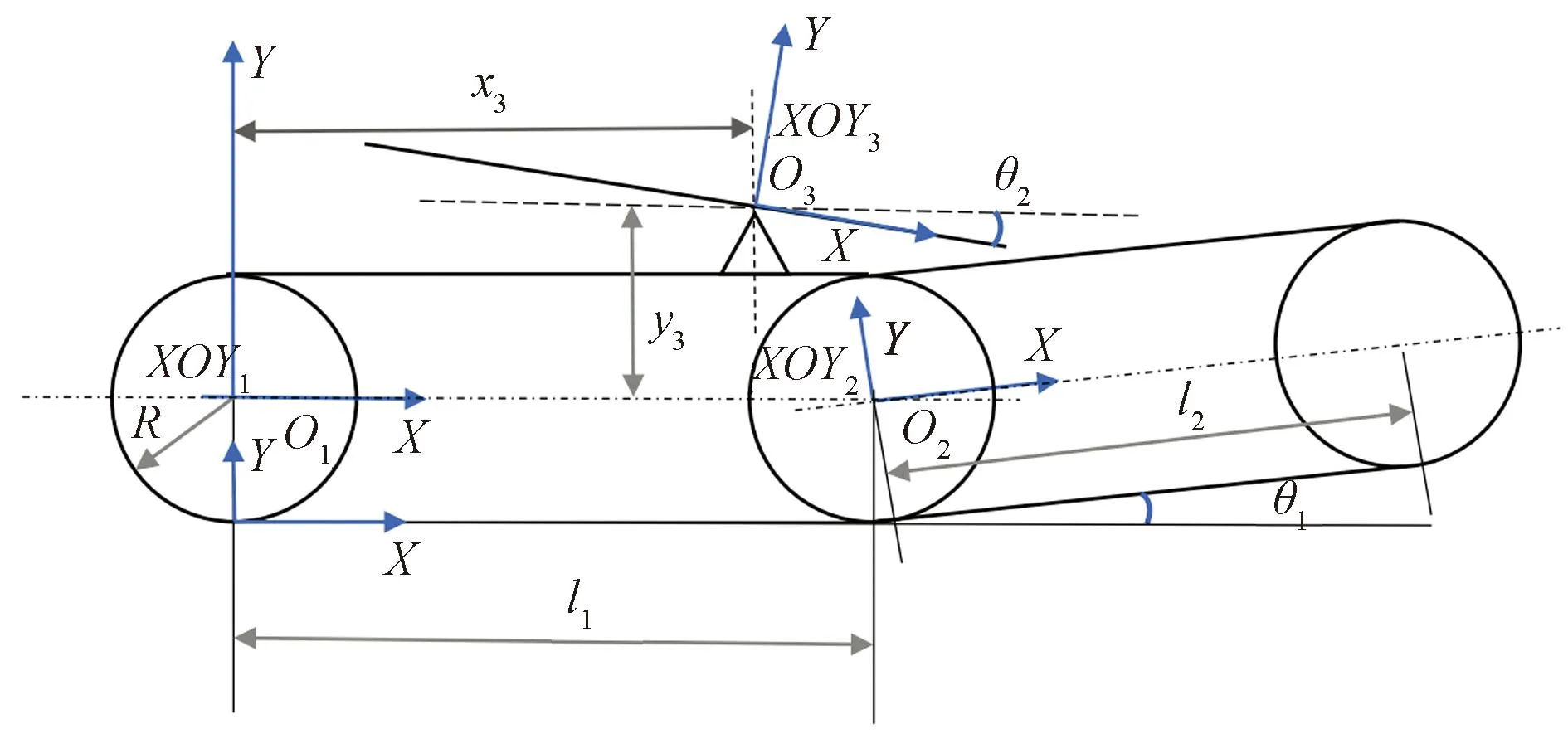
图2 伤员运载机器人坐标系简图Fig.2 Sketch of the coordinate system of the casualty carrier robot
图2所涉及的各参数及释义见表1。
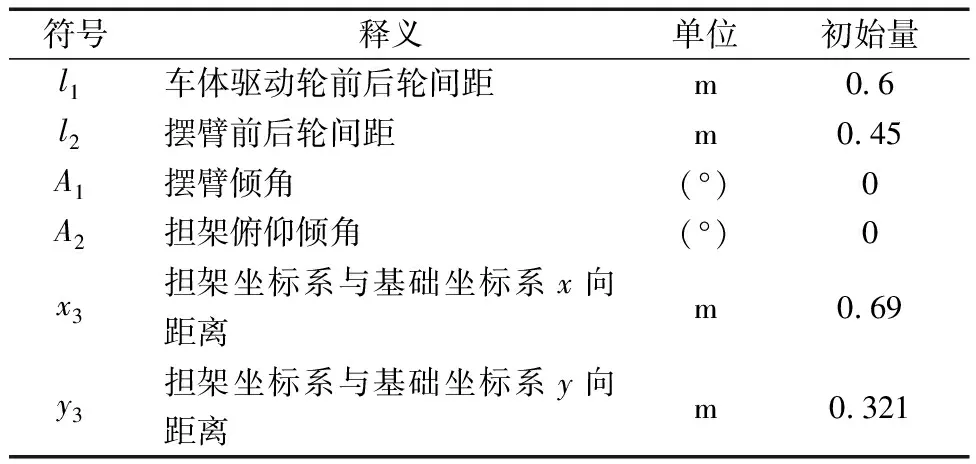
表1 坐标系参数表Table 1 Coordinate system parameter table
若是将上述坐标系看作是三维坐标系,指定Z轴的方向是垂直于纸面的方向。那么由坐标系XOY2到坐标系XOY1的变换矩阵为
(1)
坐标系XOY2到坐标系XOY1的变换矩阵为
(2)
式中:Rot、Trans分别为机器人的3×3旋转矩阵与3×1位置平移矩阵;c1、s1分别为θ1余弦值和正弦值;c2、s2分别为θ2余弦值和正弦值;x3=0.69+S,S为担架的水平位移,由机械结构实际设计尺寸测量得,S取值范围为0~0.58 m。
2.2 整体质心运动学建模
由于机器人自由度较高,关节众多,为得到其整体质心位置,采用先计算单独个体质心位置,再将它们通过以个体质量为权重计算其加权平均值,即可得到整体质心坐标位置,即
(3)
式(3)中:Px、Py、Pz为整体质心的三轴位置坐标;xi、yi、zi为各部分质心的三轴位置坐标;mi为各部分的质量;i为系统部件数目;k为系统总部件数。
分别计算三大部分在基础坐标系XOY1下的质心位置坐标。
XOY1坐标系下的底盘车体的质心坐标为
(4)
XOY2坐标系下的摆臂质心坐标为
(5)
XOY3坐标系下的担架的质心坐标为
(6)
式中:3Pxi和3Pyi为担架的重心在XOY3坐标系下的位置,由担架构型决定,需要分析计算。
由空间位置变换矩阵式(1)和式(2)可得,基础坐标系下摆臂的质心坐标为
1P(x2,y2)=1T22P(x2,y2)
(7)
基础坐标系下的担架质心坐标为
1P(x3,y3)=1T33P(x3,y3)
(8)
由式(3)结合式(4)、式(7)、式(8),可得伤员运载机器人整体质心坐标计算公式为
(9)
式(9)中:m1为伤员运载机器人底盘部分的质量;m2为伤员运载机器人摆臂部分质量;m3为伤员运载机器人担架部分质量。
综上所述,在机器人坐标系下,伤员运载机器人的质心运动学模型为
(10)
式(10)中:M=m1+m2+m3。
2.3 伤员运载机器人担架部分质心位置分析
担架部分的自由度较高,部件的相互位置关系变化较大,不仅有“担架式”构型,还有“椅子式”构型以及中间位置构型等,因此,伤员运载机器人担架部分的质心坐标位置需要结合运动学进行分析。
如图3所示,将担架机械结构抽象为一个四连杆机构,分别将担架对应人的上半身、臀部和小腿部分设定为Ⅰ、Ⅱ和Ⅲ部分,Ⅱ部分和Ⅲ部分连接处有变形电机,电机输入扭矩,推动Ⅱ部分沿着Ⅰ部分末端的弧形导轨产生角位移,但是由于Ⅰ部分是固定在伤员运载机器人本体上的,Ⅰ部分不动,那么在反力的作用下,电机反向驱使担架Ⅱ带动Ⅲ部分进行旋转,于是Ⅱ部分和Ⅲ部分以及电机关节三部分同时运动,Ⅲ部分的回转中心为变形电机轴回转中心,而Ⅱ部分的回转中心是虚拟的,为Ⅰ部分末端弧形槽的圆心。
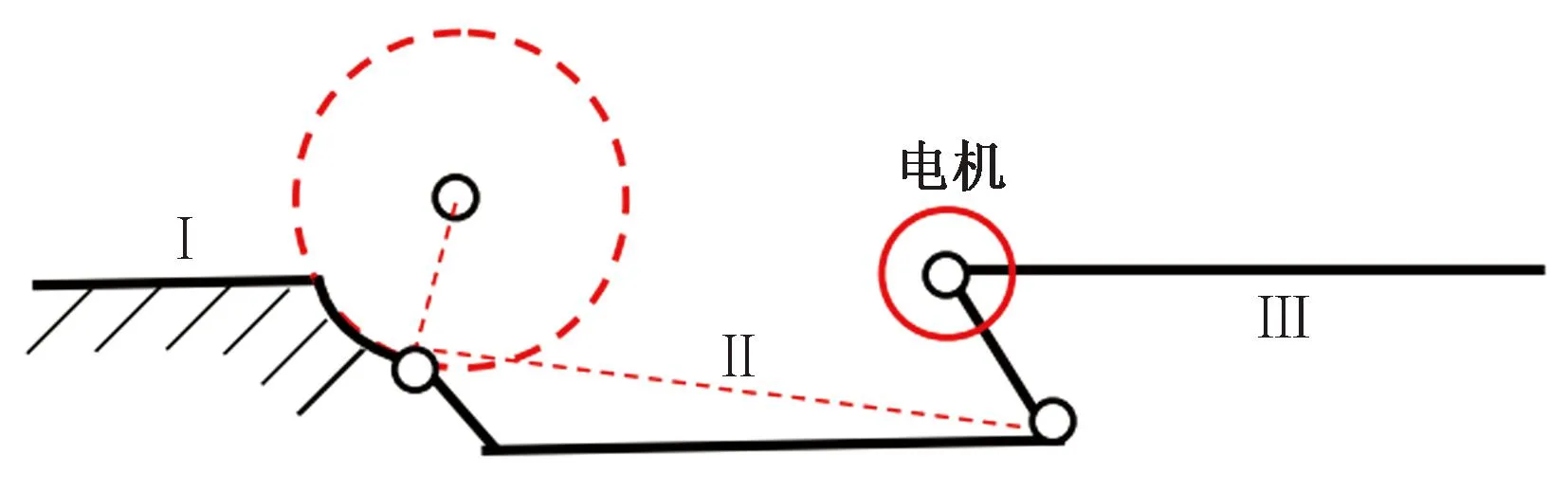
图3 担架机构简图Fig.3 Stretcher mechanism sketch
对担架机构进行运动分析,如图4所示。Ⅰ、Ⅲ部分回转中心连线分别与L1、Ⅱ部分、Ⅰ、Ⅱ部分连接处和Ⅱ部分的回转中心连线间的初始角度分别为θ1、θ2、θ3。假设电机位置不动,当θ1变化量为Δθ1时,对应的θ3变化量为Δθ3。因此,可得出以下关系。

图4 担架运动分析简图Fig.4 Stretcher movement analysis sketch
L1sinθ1+L2sinθ2=L3sinθ3
(11)
L2cosθ2-L1cosθ1=L4+L3cosθ3
(12)
为担架各变形关节设置坐标系来描述其在空间坐标系中的位置,如图5所示。
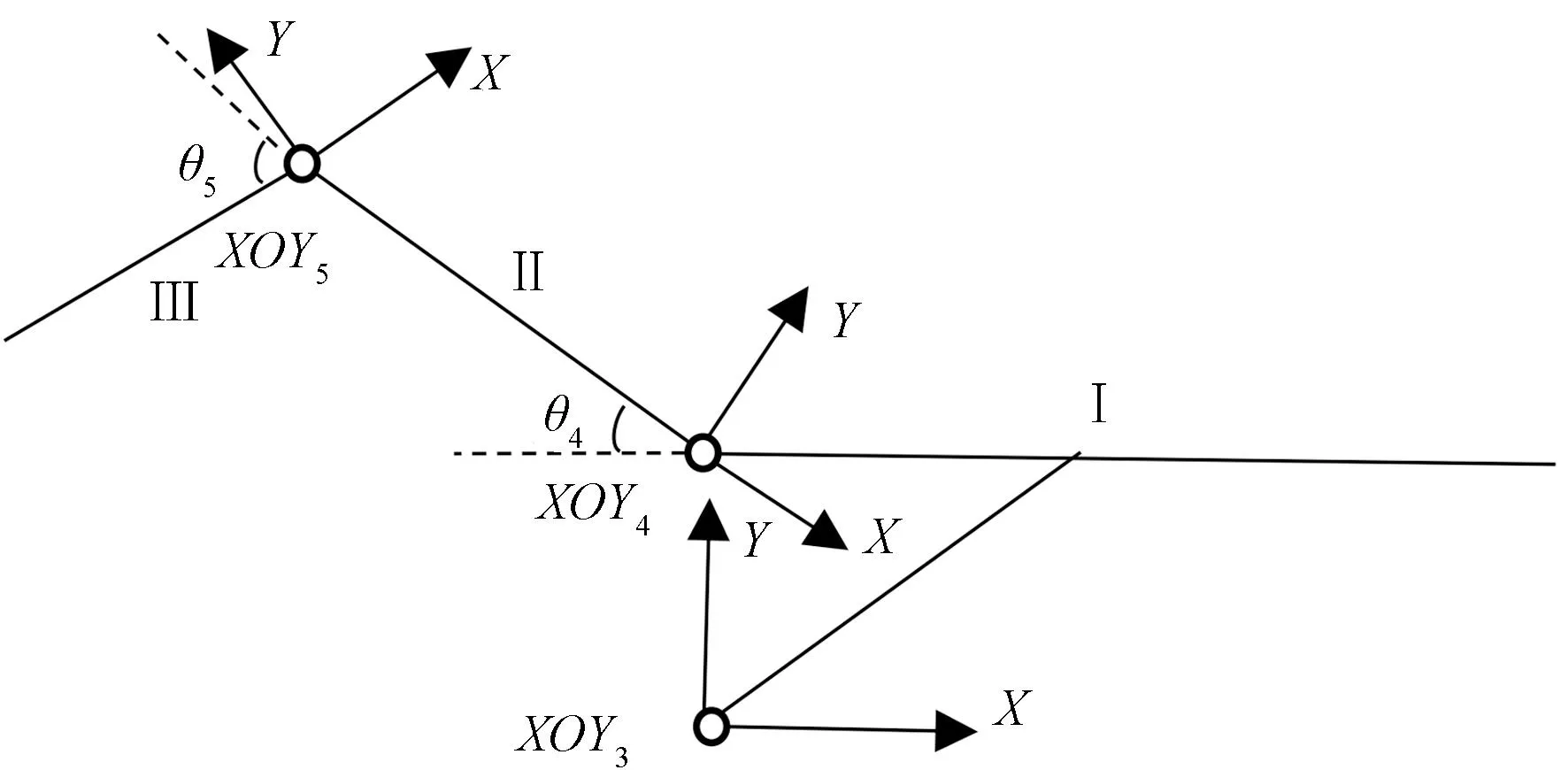
θ4、θ5分别为担架Ⅰ部分与担架Ⅱ部分之间夹角、担架Ⅱ部分与担架Ⅲ部分之间夹角的补角
将机械结构尺寸测量后,在XOY3坐标系下担架Ⅱ部分的重心坐标为
(13)
式(13)中:c4、s4分别为θ4的余弦值和正弦值。在XOY3坐标系下担架Ⅲ部分的重心坐标为
3PⅢ=3T44T55PⅢ=
(14)
式(14)中:c5、s5分别为θ5的余弦值和正弦值。在XOY3坐标系下担架Ⅰ部分的重心坐标为
(15)
则在XOY3坐标系下,担架的质心x坐标为
(16)
则在XOY3坐标系下,担架的质心y坐标为
(17)
式中:3PⅠx3、3PⅡx3、3PⅢx3与3PⅠy3、3PⅡy3、3PⅢy3可由式(13)~式(15)求得;m1、m2、m3为担架三部分的质量,分别是80.2、48.4、16.8 kg;θ4=Δθ3;θ5为电机角度变化量。
3 伤员运载机器人的构型稳定性判定
伤员运载机器人在工作过程中,面对楼梯与地面环境的不断改变,需要不断改变机器人各关节构型来应对环境变化对机器人重心稳定性的影响。由于机器人的对称性结构,故只需考虑机器人在上楼过程中的倾覆的危险情况。而最有可能发生危险的阶段就是机器人从平地上楼梯的阶段和从楼梯到平地的过程,故对这两个危险阶段进行分析。
3.1 伤员运载机器人地面到楼梯阶段构型稳定性分析
机器人在运动和越障的过程中必须要保持一定的稳定性,不能发生侧翻或倾倒等现象,为此,可以采用稳定锥方法对机器人越障过程中的稳定性进行分析[10-11]。对机器人该阶段进行分析,如图6所示。
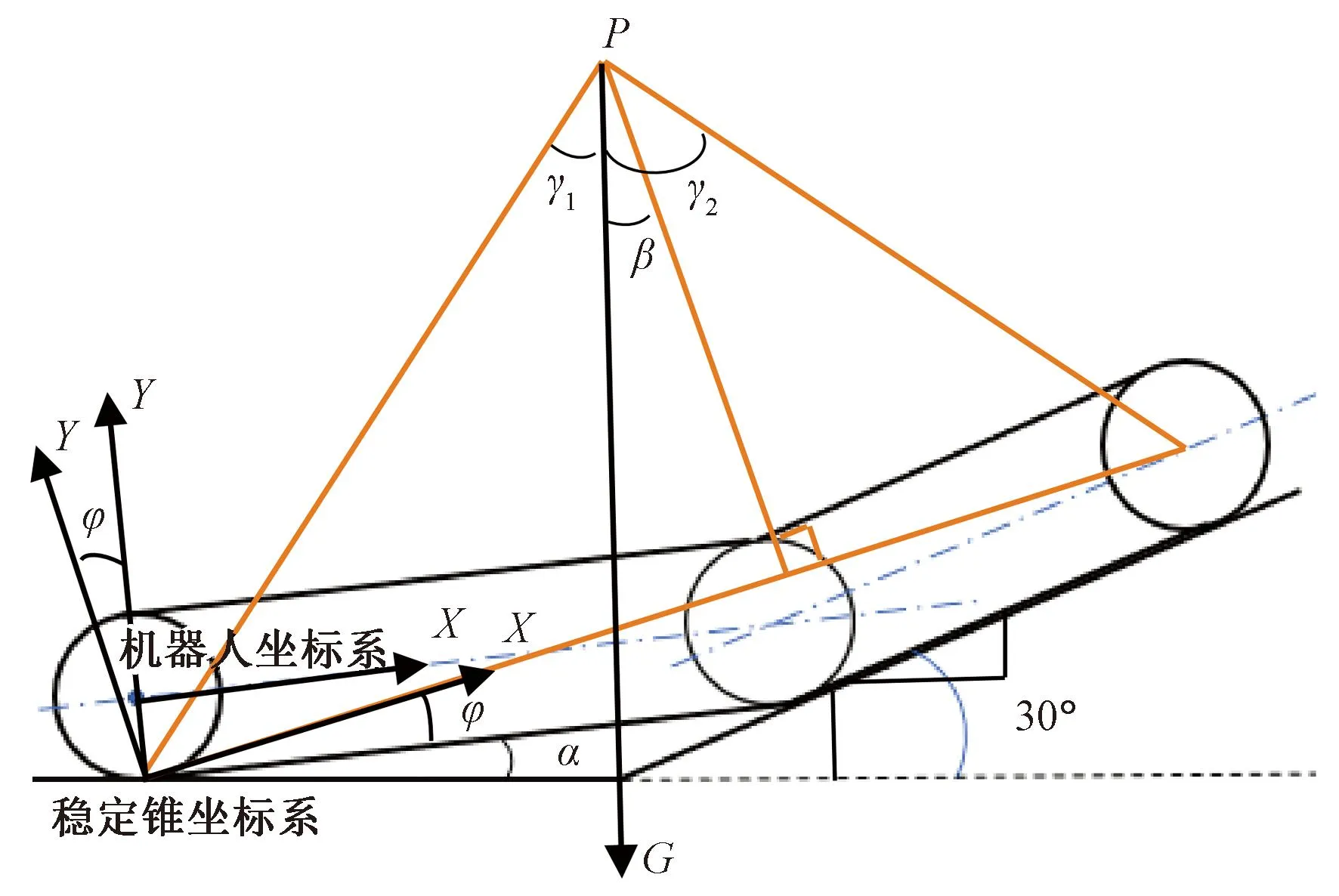
图6 伤员运载机器人驶上楼梯阶段稳定性分析简图Fig.6 Sketch of the stability analysis of the casualty carrying robot during the drive up the stairs
图6中,P为机器人整体质心位置,对机器人建立稳锥模型,并建立稳定锥坐标系。由几何关系可知,有

(18)
式(18)中:φ为基础坐标系与稳定锥坐标系之间的变化关系角;α为机器人坐标系的x轴与水平地面间的夹角;β为稳定锥三角形垂线与重力方向夹角。因实验楼梯角度为30°,故取值范围为0°~30°。l1为伤员运载机器人底盘前后轮中心距,m;l2为伤员运载机器人摆臂前后轮中心距,m;x为底盘主履带位移,m。
已知φ,可求由机器人坐标系到稳定锥坐标系的变换矩阵为
(19)
式(19)中:R为伤员运载机器人底盘后轮回转中心到地面接触点的距离。
故质心坐标为
(20)
其中,由式(10)可知,有
1Px=
(21)
(22)
则在稳定锥坐标系下,伤员运载机器人整体质心的x坐标位置计算公式为
0Px=cosφ1Px+sinφ1Py+Rsinφ
(23)
在稳定锥坐标系下,伤员运载机器人整体质心的y坐标位置计算公式为
0Py=cosφ1Py-sinφ1Px+Rcosφ
(24)
由稳定锥定义可知,稳定锥的各条边线与重力方向的夹角即为边线稳定角,可得该阶段伤员运载机器人各边线稳定角计算公式如下。
(25)
(26)
设该阶段伤员运载机器人的重心稳定角为γ,由稳定锥算法可知,取边线稳定角中的最小角,即
γ=min(γ1,γ2)
(27)
当γ<0时,伤员运载机器人将会重心失稳,发生危险。当γ>0时,证明伤员运载机器人的重心是处于安全位置,机器人属于重心稳定状态。
3.2 伤员运载机器人楼梯到地面阶段构型稳定性分析
该阶段同理地面到楼梯阶段的稳定角计算方法,针对伤员运载机器人从楼梯到地面阶段的重心稳定性分析如图7所示。
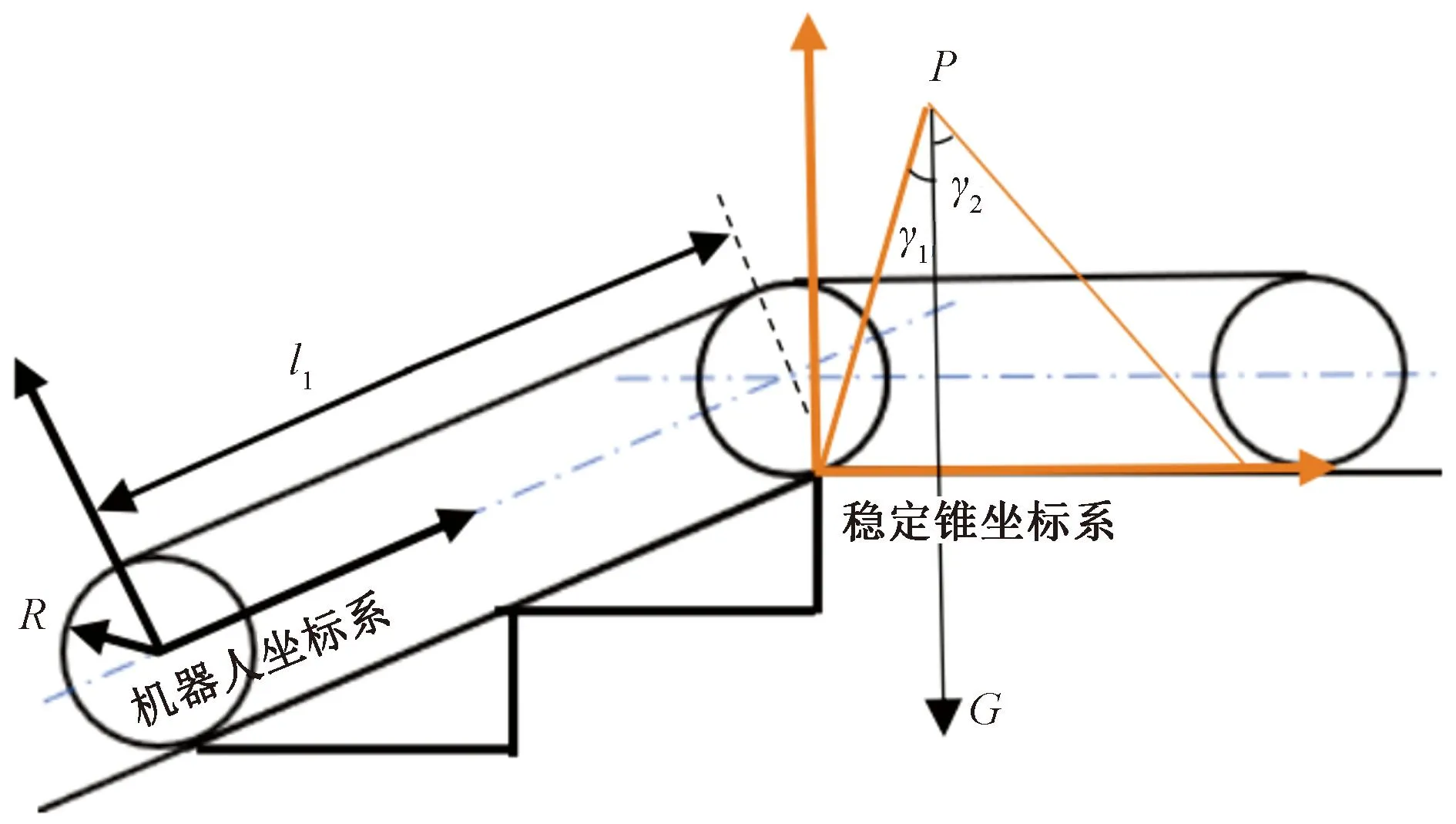
图7 伤员运载机器人楼梯到地面阶段稳定性分析简图Fig.7 Sketch of the stability analysis of the stair-to-surface phase of the Casualty Carrier Robot
从机器人坐标系到稳定锥坐标系的变换矩阵为
(28)
式(28)中:C为cos(30°-θ1)的简写形式;S为sin(30°-θ1)的简写形式;θ1为机器人摆臂关节旋转角度。
则该阶段稳定锥坐标系下的伤员运载机器人重心坐标位置为
(29)
由稳定锥定义可知,稳定锥的各条边线与重力方向的夹角即为边线稳定角,可得该阶段伤员运载机器人各边线稳定角计算公式为
(30)
式(30)中:γ为该阶段伤员运载机器人的重心稳定角。
同理,当γ<0时,伤员运载机器人将会重心失稳,发生危险。当γ>0时,证明伤员运载机器人的重心是处于安全位置,机器人属于重心稳定状态。
4 仿真与实验
4.1 MATLAB仿真
利用上述方法对机器人各阶段构型进行稳定性分析,并利用MATLAB进行仿真计算。
在准备上楼阶段,为了伤员的舒适性与安全性,担架应由“担架式”变为“椅式”。如图8所示,随着变形角度的变大。机器人的稳定性逐渐降低。
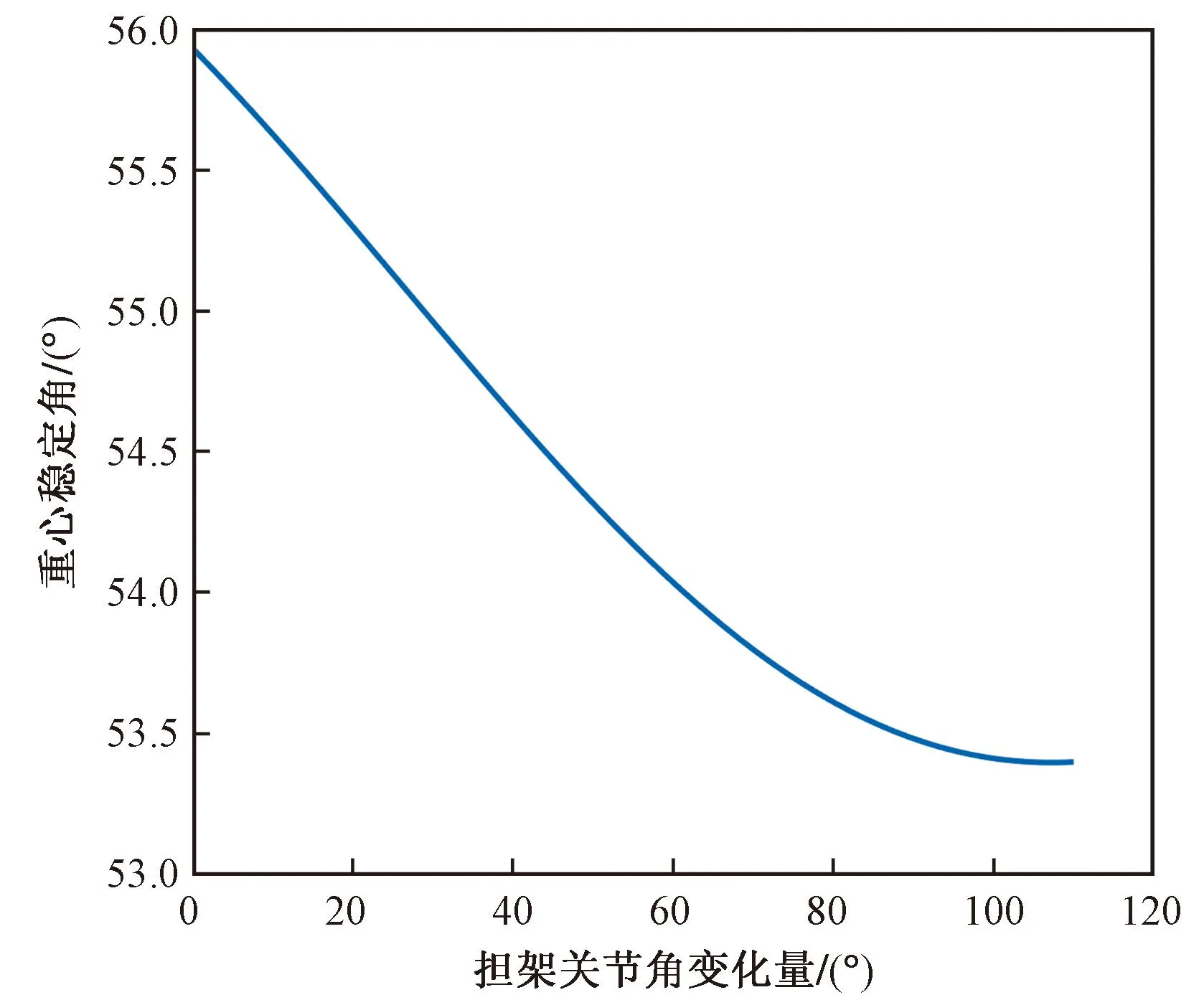
图8 担架变形调整下的重心稳定角变化图Fig.8 Graph of the change in the angle of stability of the centre of gravity under stretcher deformation adjustment
在地面到楼梯阶段。若“椅式”构型下,不进行重心调整。此时主履带位移是影响稳定锥变化的唯一变量。如图9和图10所示,机器人的稳定性随着主履带位移的增加而降低。
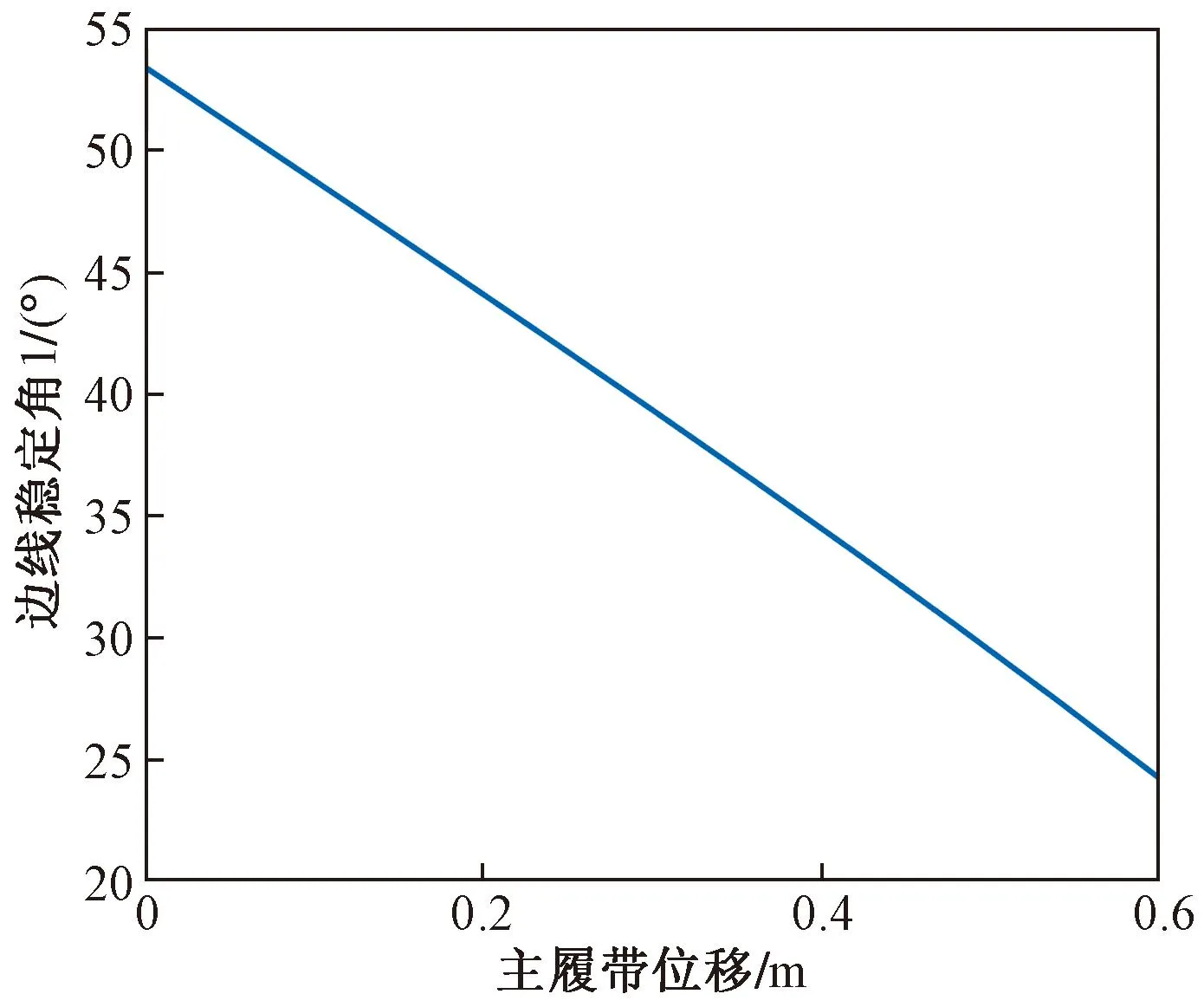
图9 无重心调整机构作用下边线稳定角1的变化图Fig.9 Change of edge stability angle 1 under the action of no center of gravity adjustment mechanism
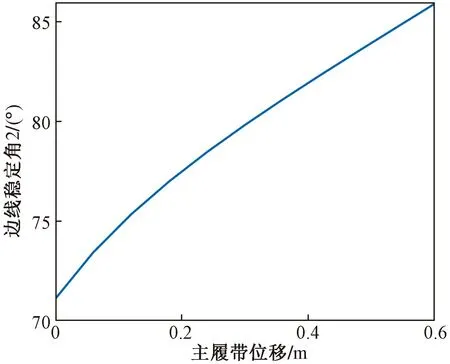
图10 无重心调整机构作用下边线稳定角2的变化图Fig.10 Change of edge stability angle 2 without center of gravity adjustment mechanism
在地面到楼梯阶段,若只对担架俯仰进行重心调整,结果如图11所示。只对担架位移进行调整,结果如图12所示。
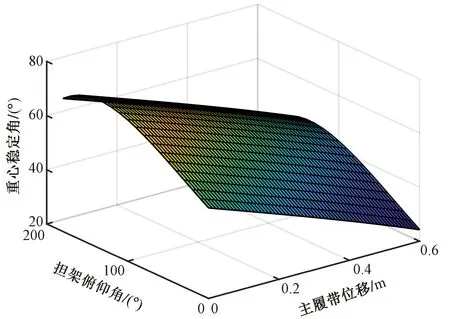
图11 担架俯仰机构作用下的稳定性分析图Fig.11 Stability analysis diagram under the action of the stretcher pitching mechanism
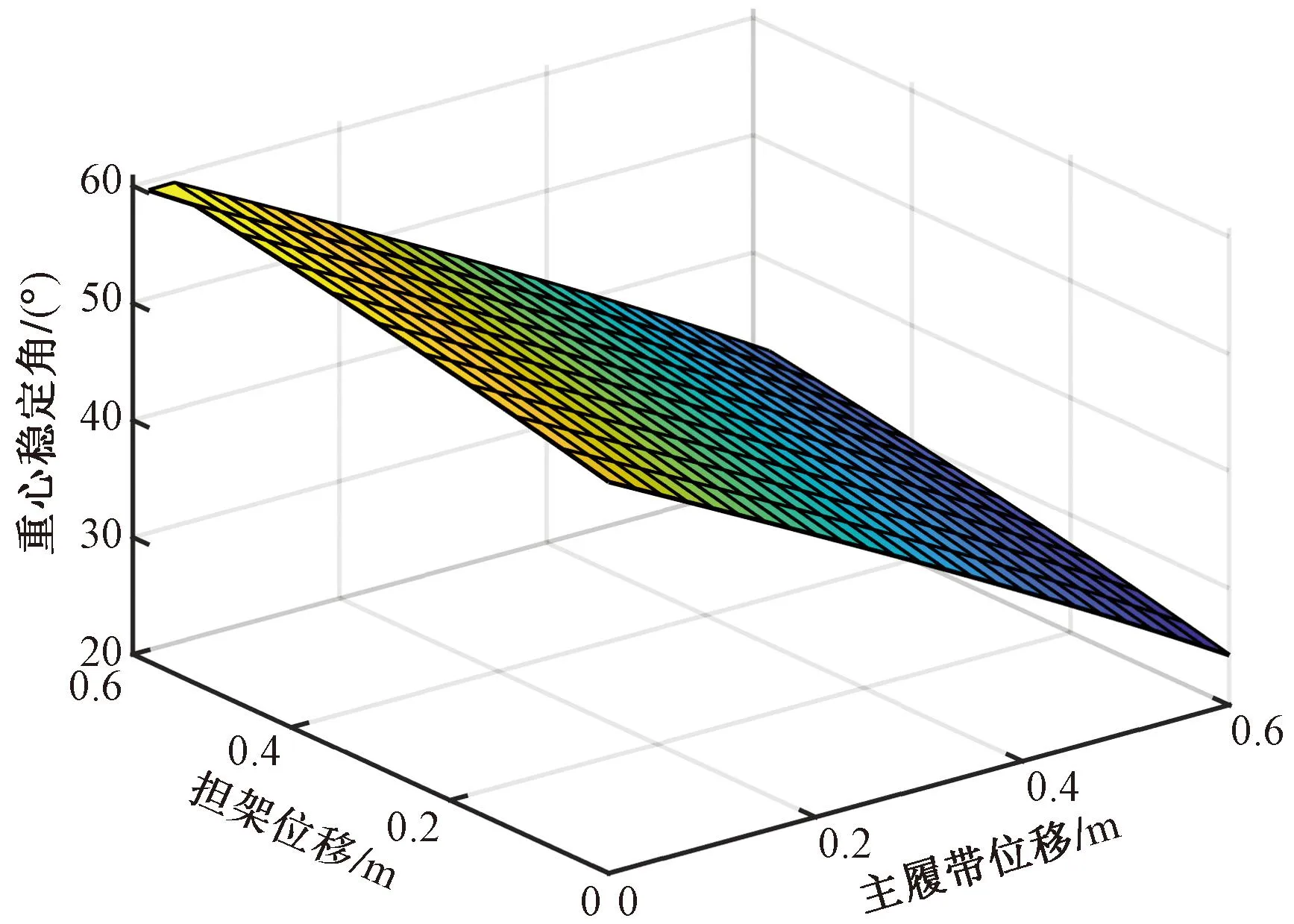
图12 担架位移机构作用下的重心稳定性分析图Fig.12 Stability analysis diagram of the centre of gravity under the action of the stretcher displacement mechanism
综合分析可知,在主履带位移最大的情况下,机器人的稳定性最差。针对此时刻对担架俯仰与担架位移同时调整,调整结果如图13所示。可见,在担架俯仰与位移的双重作用下,效果是优于担架位移或者担架俯仰单一的调整效果的,使伤员运载机器人的重心稳定角大幅度提升,可满足该阶段机器人该阶段的重心稳定要求。

图13 担架位移与俯仰共同作用下的稳定性分析图Fig.13 Stability analysis diagram for the combined effect of stretcher displacement and pitch
从楼梯到平地阶段,机器人重心稳定性如图14所示,随着摆腿角度变化,稳定性降低,但机器人在此构型下始终都是稳定的。
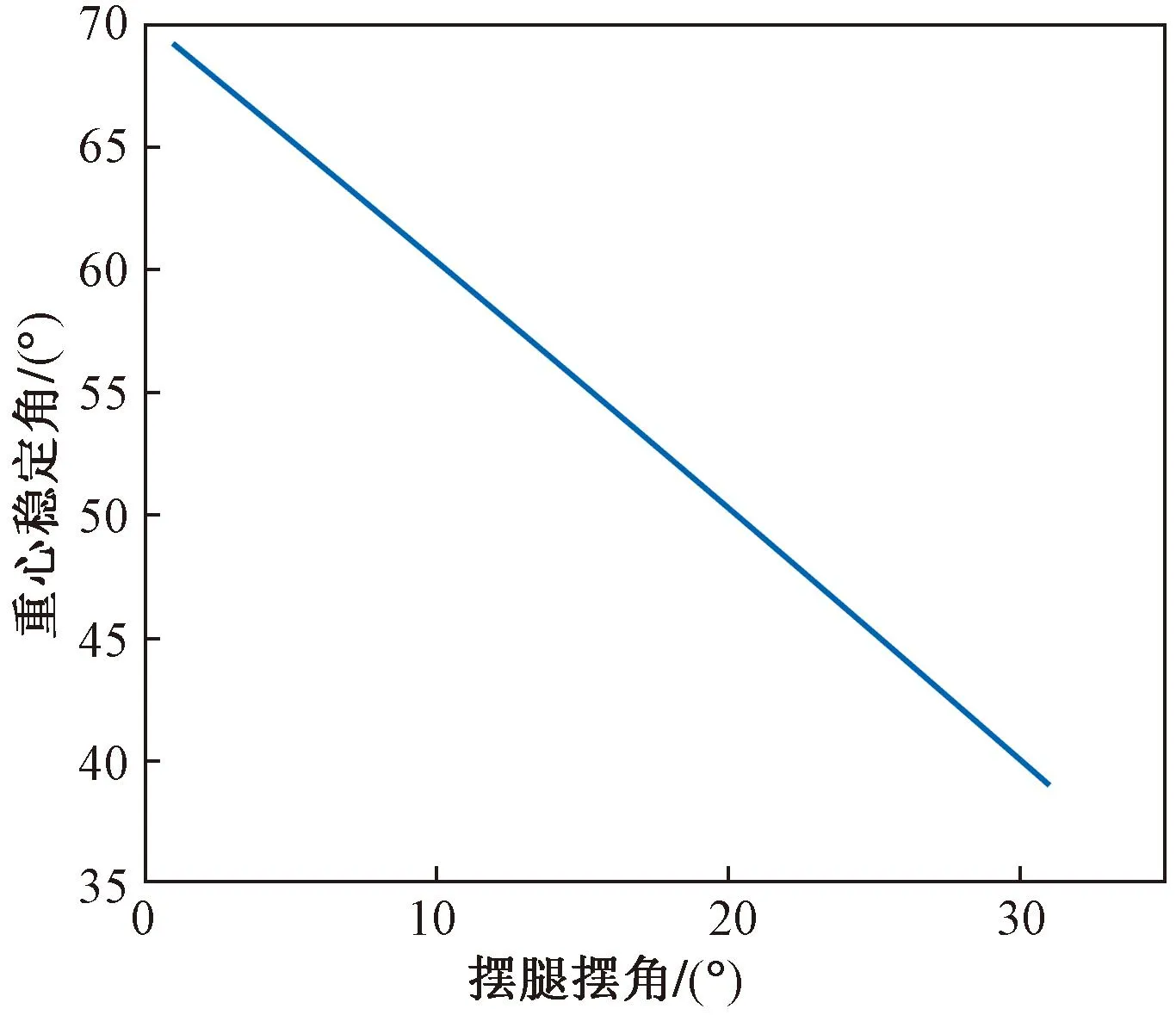
图14 楼梯到地面稳定性分析图Fig.14 Stair-to-floor stability analysis diagram
4.2 真实楼梯环境实验
通过MATLAB进行仿真分析,得出各个重心调整机构运动对机器人重心的影响及各阶段的最优姿态。将最优姿态应用到样机,并搭载实验假人(75 kg)进行楼梯环境实验,楼梯倾斜角度为30°。实验结果如图15所示,可以看出,机器人与实验假人安全上楼。
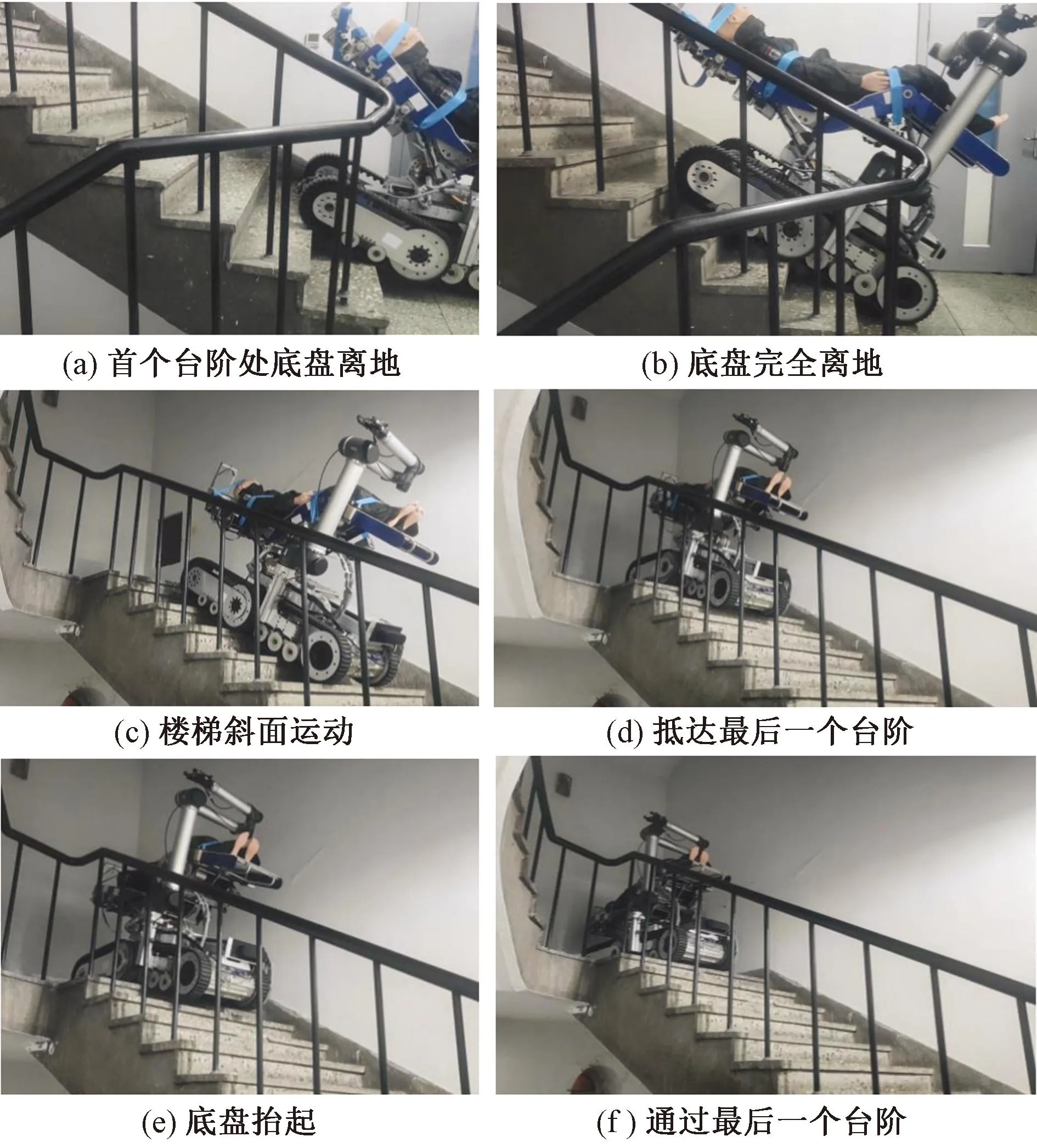
图15 伤员运载机器人样机实地实验Fig.15 Field experiments with a prototype casualty-carrying robot
5 结论
(1)通过边线稳定角的大小来判断伤员运载机器人重心稳定性的方案是可行的。
(2)本文方法计算出的最优姿态可轻松应对伤员运载机器人在上楼过程中重心的变化,为保证伤员运载机器人的安全性具有重大意义。
猜你喜欢
作文小学高年级(2023年5期)2023-05-29
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
劳动保护(2019年7期)2019-11-25
灾害医学与救援(电子版)(2018年1期)2018-06-05
文学少年(有声彩绘)(2017年9期)2017-10-23
小布老虎(2017年3期)2017-08-10
小天使·一年级语数英综合(2016年4期)2016-11-19
读者·校园版(2015年16期)2015-05-14
中国卫生(2014年10期)2014-11-12