成都市汽油车尾气遥感检测数据排放限值研究*
2024-01-25 05:44李佩璇施欣博
环境污染与防治 2024年1期
李 金 詹 宇 李佩璇 施欣博 陈 耀 王 斌
(四川大学建筑与环境学院,四川 成都 610065)
移动源排放是成都市大气污染物的重要来源之一,给公众造成了巨大的健康和经济损失,加强移动源排放管控已成为成都市大气污染防治的重要工作[1-3]。了解车辆实际尾气排放对于科学评估管控措施的有效性非常重要。目前,车辆尾气排放检测方法主要有实验室测试、车载测试和道路遥感检测等[4]60。相较于其他方法,道路遥感检测是一种快速、经济、有效的在用车辆尾气排放检测方法,检测设备可以在不干扰车辆正常行驶的状况下1 s内瞬时监测车辆排放,便捷、高效地反映车辆在道路行驶时的真实排放情况[5-6]。
2017年原环境保护部发布《汽车污染物排放限值及测量方法(遥感检测法)》(二次征求意见稿),但一直没有正式颁布并在全国实施。我国多地出台了在用汽车遥感检测污染物排放限值的地方标准及道路移动源非现场执法的地方标准,部分地区地方标准已经更新。目前四川地区并未制定遥感检测法地方标准,为赶上全国移动源管控脚步,成都市应加速推进制定符合成都市域环境特点的地方标准或地方管理规范。
国内外针对基于道路遥感检测法确定车辆的排放限值进行了大量研究,早期研究通常使用任意设定的切割点来识别高排放车辆,如HUANG等[7]140采用污染物排放因子的95%分位数划定柴油车的高排放车辆切割点,这种方法具有较强的主观性与经验性,与车辆自身排放特征相关性较弱。为结合车辆特征进行高排放车辆筛选,RUSHTON等[8]1将极值统计学应用于遥感检测法的高排放车辆筛选。极值统计学包括广义极值分布(GEV)和广义Pareto分布(GPD)两个类型,该团队假设遥感检测车辆的污染物排放数据整体符合GEV中的Gumbel分布,而模型外的数据则推断是由于部分车辆的高排放特性所表现出的异常统计规律。YANG等[9]1使用这一方法分析了柴油车NO排放限值,但此方法依赖于遥感检测的污染物数据集的自身分布,且不同研究显示出的遥感检测污染物数据集呈现不同的分布特征[10-11],较难广泛适用。
鉴于上述遥感检测车辆排放限值的估计方法存在不足,本研究提出一种新的确定汽油车污染物排放限值的方法。由于大量研究表明,遥感检测污染物数据集呈现高度偏斜状态[12-13],偏斜尾部部分是由污染物高排放值组成,本研究假设这部分污染物高排放值组成的右尾分布因为高排放特征而服从某个特定的分布规律,因此使用极值统计学的GPD函数拟合污染物的偏斜尾部,其次使用Kolmogorov-Smirnov检验(简称K-S检验)定量判断GPD拟合效果,得到拟合结果良好对应的阈值,则服从GPD的超出量函数值为污染物高排放数据集,由此确定的阈值为污染物排放限值。这种方法不需考虑遥感检测数据集自身分布特征,具有广泛适用性,而且采用科学定量的手段确定阈值,去除了主观因素影响,研究结果可为成都市制定汽油车遥感检测法地方标准、移动源管控提供参考。
1 数据及方法
1.1 遥感检测数据来源
道路遥感检测技术是一种基于光谱学原理测定道路移动源尾气排放污染物浓度的方法,由红外和紫外探测器、车牌识别器、速度/加速度检测器等3个部分组成[14]。当移动源尾气排放烟羽通过遥感检测设备时,红外和紫外探测器利用不同成分污染物对不同波长的红外线或紫外线的吸收作用,测定不同污染物的体积分数比(如CO/CO2、NO/CO2、碳氢化合物(HC)/CO2)从而计算各污染物体积分数(CO、NO、HC等)[15-16]。车牌识别器用于识别车辆的车牌号码,从车辆登记数据库中通过车牌号码检索车辆燃料类型、车辆登记日期、型号等信息。速度/加速度检测器通过记录车辆经过时的瞬时速度和加速度计算车辆的比功率(VSP),用于判断其行驶状态是否符合污染物检测要求。
本研究采用成都市4个遥感检测装置监测的2021年道路尾气排放数据,涉及到1 638 225条汽油车数据。汽油车遥感检测数据集包括环境信息(风速、风向、大气压、温度、坡度、湿度)、污染物检测信息(CO/CO2、HC/CO2、NO/CO2、CO2、CO、HC、NO、不透光度、林格曼黑度)、车辆信息(车牌号码、燃料信息)和车辆行驶状态信息(速度、加速度),遥感检测设备布点及设备信息见表1。由于下雨、下雪、大风等天气条件会影响遥感检测设备的测量结果[4]62,且车辆在不同VSP下污染物排放浓度稳定性差异较大[17],因此结合《汽车污染物排放限值及测量方法(遥感检测法)》(二次征求意见稿)和相关文献研究结果[18],本研究对遥感检测数据按照以下规定进行筛选:(1)环境条件,风速≤5 m/s,相对湿度≤90%,大气压70.0~101.4 kPa;(2)车辆行驶状态,VSP 0~14 kW/t。将筛选后的遥感检测数据集与成都市车牌登记数据库匹配,补充被检车辆的登记日期、车辆类型信息,最终获取344 156辆汽油车,涉及971 647条遥感检测数据。

表1 成都市遥感检测布设点位及设备信息Table 1 Location of remote sensing monitoring sites in Chengdu and the equipment information
1.2 GPD函数的参数估计与阈值的确定
在GPD函数G(x;u,σ,ε)中[19]17,以遥感检测数据为随机序列x,定义u为阈值,σ为尺度参数(σ>0),ε为形状参数(ε∈R)。GPD函数的关键在于阈值的选取,本研究采用K-S检验法确定阈值u,采用极大似然估计法估算GPD分布函数的另外两个参数σ、ε[19]36。
采用GPD函数研究遥感检测汽油车尾气CO、HC、NO排放限值的方法可归纳如下:
(1) 初步选取阈值。对比我国在用汽油车遥感检测法的各地方标准中各污染物的浓度,将最小值确定为初始阈值u0,CO为1.2%,HC为200×10-6,NO为900×10-6。
(2) 估算参数值。从阈值u0开始,参考我国汽油车遥感检测地方标准的污染物排放限值形成阈值数据集{u0,u1,…ui…,un},将我国在用汽油车遥感检测法各地方标准的最大值定义为max(u)。采用极大似然估计法估算当阈值为ui时对应的εi、σi。本研究中,CO阈值数据集为{1.2%,1.3%,…,3.5%},HC阈值数据集为{200×10-6,210×10-6,…,600×10-6},NO阈值数据集为{800×10-6,900×10-6,…,2 500×10-6}。
(3) 分别计算实际和理论分布函数值。对于遥感检测数据,对超过阈值ui的数据序列计算实际GPD函数G1(x≥ui),同时,由大于ui的数据和估算得到的σi、εi得到理论GPD函数G2(x≥ui)。
(4) 用K-S检验进行分布的拟合优度检验。计算G1(x≥ui)和G2(x≥ui)之间的最大绝对差异值(D0)及显著性水平在95%分位的差异值(Dα),D0、Dα的计算方法参考文献[20]。当D0≤Dα时,说明两个样本来自同一样本。在本研究中,当D0≤Dα时表明此时超出ui的监测数据分布服从GPD。结合GPD函数的性质,要求阈值后的超出量函数值均应满足D0≤Dα。
(5) 输出结果。依次输入阈值数据集进行K-S检验,查看是否满足D0≤Dα,若满足则输出阈值结果,反之则重复步骤(2)至(4),直至满足D0≤Dα,输出阈值结果。
综上,基于GPD的汽油车污染物排放限值估计流程见图1。将得到的阈值结果用作遥感检测的汽油车尾气排放限值,并与国家标准征求意见稿和各地方标准进行对比分析,判断其是否处于合理区间。

图1 基于GPD函数的汽油车污染物排放限值估计流程Fig.1 Flowchart of estimating gasoline vehicle emission limits in Chengdu based on GPD function
2 结果和分析
2.1 阈值的选择
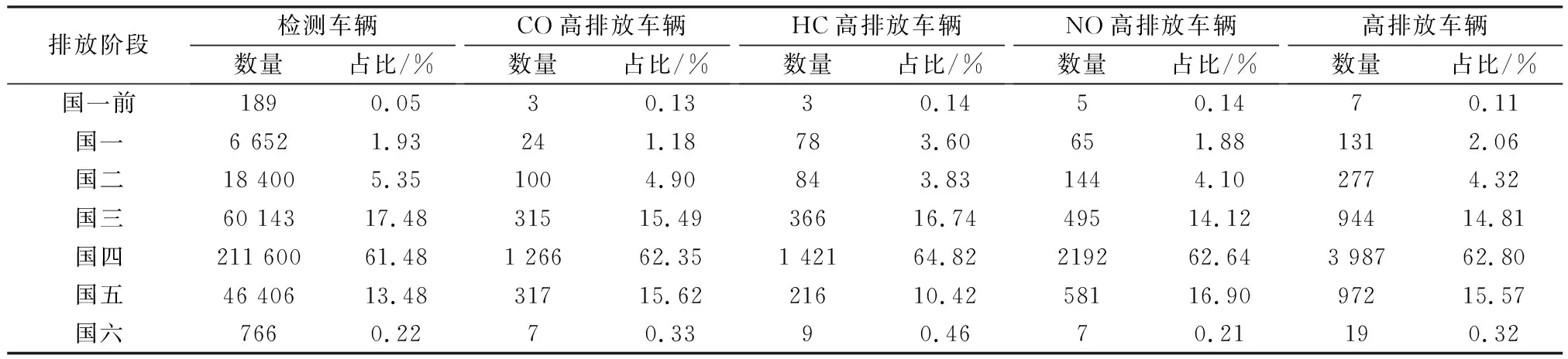
对CO、HC、NO的有效检测数据进行GPD拟合,使用K-S法进行多次优度检验,结果见图2。在CO体积分数为2.9%,HC体积分数为430×10-6时D0 图2 K-S检验法确定不同污染物阈值Fig.2 Thresholds of different pollutants determined by the K-S test 图3 不同污染物GPD拟合结果Fig.3 The fitting result of GPD for different pollutants 表2 不同污染物超阈值样本理论GPD函数与实际GPD函数检验定量分析Table 2 Quantitative test of theoretical distribution and actual distribution of over threshold samples of different pollutants 采用极大似然估计法估计3种污染物阈值对应的GPD函数参数,结果如表3所示。CO阈值为2.9%时,GPD函数估计的σ为1.39,ε为-0.18,由于形状参数小于0,说明CO超阈值样本符合GPD Ⅲ型分布,即为Beta分布。使用同种估算方法,HC阈值为430×10-6时,拟合GPD函数的σ为379.87,ε为0.16;NO阈值为1 400×10-6时,拟合GPD的函数σ为600.16,ε为0.13。由于HC、NO超阈值样本GPD函数拟合的ε均大于0,则两种污染物均为GPD Ⅱ型分布,即为Pareto分布。 表3 不同污染物阈值与参数统计Table 3 Statistics of thresholds and parameters for each pollutant 基于遥感检测结果,运用极值统计学的GPD筛选分析高排放车辆,由表3可见,仅有极小部分车辆(不足1%)数据表现出极值特征,推测是部分车辆高排放的行为导致。使汽车排放控制系统处于较低性能的原因较多,比如冷启动、环境温度或催化剂失活等。HAUNG等[21]3研究发现发动机故障、排气系统故障、两种氧传感器故障导致的空气/燃料比控制不准确等均会大大增加CO、HC、NO的排放。此外,汽车净化装置中的催化剂中毒、烧结或损坏均可能在不同程度上导致催化剂的催化效率降低,亦会使汽车尾气产生的CO、HC、NO等有毒气体未被高效净化,排放至大气中。因此,本研究将拟合GPD的数据集定义为机动车高排放数据集,污染物的最佳阈值为高排放车辆的切割点,即CO排放限值为2.9%,HC排放限值为430×10-6,NO排放限值为1 400×10-6。 国外已有学者将极值统计学模型应用于高排放车辆筛选。RUSHTON等[8]4假设遥感检测的NO/CO2数据集总体符合极值统计学的Gumbel分布,而未符合Gumbel分布的离群值则视为高排放值,其研究结果显示汽油车绝大部分数据集符合Gumbel分布,而大部分离群值所占比例不超过2%[8]8。YANG等[9]5基于文献[8]的方法,采用更大的数据样本进行了深入研究,结果亦显示“Gumbel模型外”数据占比仅0~1%,即高排放车辆占比不足1%,与本研究高排放车辆占比具有一致性。而现有研究中多直接采用分位数的方法确定污染物的高排放值,PUJADAS等[22]、HUANG等[7]140采用95%分位数确定高排放车辆,BORKEN KLEEFELD等[23]、NING等[24]采用90%分位数作为高排放车辆的切割点。然而,直接根据分位数划定高排放车辆具有较强的主观性,此外随着更加清洁车辆的加入,老旧车辆的淘汰,高排放车辆占比逐渐降低,较难依据先前研究直接确认高排放车辆比例。因此需要采用更加科学的统计学方法筛选高排放车辆,而极值统计学能依据实际情况科学地筛选出具有极值特征的车辆。 《汽车污染物排放限值及测量方法(遥感检测法)》(二次征求意见稿)对遥感设备检测的汽油车污染物排放限值进行了规定(CO 3.0%、NO 2 000×10-6),我国多个省(市)、特别行政区等已制定了遥感检测法地方标准。将本研究基于极值统计学确定的汽油车遥感检测的污染物排放限值与其他地区地方标准对比,若地方标准中由于对汽车按照车辆登记日期进行分类管控而出现多个污染物排放限值,则选择最为严格的污染物排放限值进行对比,结果见表4。相较于《汽车污染物排放限值及测量方法(遥感检测法)》(二次征求意见稿),本研究补充了HC排放限值,加严了CO、NO排放限值。与其他地方标准相比,本次研究确定的各污染物排放限值均处于中间水平,说明极值统计学确定的污染物排放限值在实际应用上亦具有合理性。 表4 不同地方标准污染物排放限值对比Table 4 Comparisons of pollutant emission limits from different local standards 基于本研究确定的遥感检测车辆的污染物排放限值,对成都市汽油车遥感检测数据进行校核,共筛选出6 337辆存在超出排放标准限值的车辆,对这些车辆的污染物排放情况进行统计,结果见表5。CO、HC、NO高排放车辆占比均在30%以上,而3种污染物同时为高排放的比例极低,仅占0.30%,说明被检车辆1种污染物的高排放并不意味着其他污染物同时亦是高排放。以往的有关机动车遥感检测研究也显示了CO、HC、NO高排放之间相关性较低[25-26]。这是由于这些污染物产生的方式存在差异,NO是在高温富氧条件下产生,CO和HC是在缺氧条件下产生,而CO是汽油不完全燃烧的产物,HC是由汽油挥发或汽油未完全燃烧产生[27]。单个车辆HC排放高不一定意味着CO排放高,比如部分车辆由于点火系统出现故障或过高的空/燃比使车辆无法点火而导致汽油挥发,此时HC排放很高,但由于汽油未燃烧,所以CO排放很低[28]。因此,筛选高排放车辆的标准应是超过CO、HC、NO中任一排放限值时即为高排放车辆。 表5 成都市高排放车辆数量及占比分析Table 5 Number and proportion of high-emitting vehicles in Chengdu 本研究分别对遥感检测车辆、CO高排放车辆、HC高排放车辆、NO高排放车辆及6 337辆高排放车辆的排放阶段组成特征进行分析,结果如表6所示。3种污染物高排放车辆的阶段分布比例与遥感检测车辆具有较好的一致性,均是国四阶段车辆占比最高,超过60%。遥感检测车辆中,国三阶段车辆占比达17.48%,大于国五阶段车辆的13.48%,而高排放车辆中,国五阶段车辆占比(15.57%)却略高于国三阶段车辆(14.84%),这与老旧车辆的维修、淘汰有关。一方面,随着车辆使用年限的增长,其年检次数要求更为严格,因此国三的故障车辆更容易被检查出来进行维修或淘汰。另一方面,有研究表明高里程数车辆排放更高[29],出租车等载客运营车辆故障率更高[21]4。根据《机动车强制报废标准规定》第五条:“小、微型出租客运汽车使用8年,中型出租客运汽车使用10年,大型出租客运汽车使用12年”,则国三阶段载客的中小型运营车辆已不能作为运营车辆,所以国三阶段车辆降低了这类高排放车辆比例。而对比不同污染物高排放车辆的国五阶段、国三阶段车辆占比情况发现,CO、NO高排放车辆中,国五阶段的占比高于国三阶段,HC高排放车辆则呈相反特征,是因为故障维修能大大减少车辆的CO和NO排放,而对HC排放量减少影响不明显[21]5。 表6 成都市不同排放阶段下检测车辆及污染物高排放车辆数量及占比Table 6 Number and proportion of inspected vehicles and high-emitting vehicles at different regulation stages in Chengdu (1) GPD函数适用于遥感检测数据集的高排放车辆筛选。理论GPD函数与实际GPD函数之间线性拟合的R2均大于0.999,其拟合超阈值样本效果理想。应用方面,由GPD函数确定的污染物排放限值处于国内同类标准限值的中间水平,由此筛选成都市汽油车超标率(不超过1%)与国外研究具有较好的一致性。 (2) 为加强遥感检测设备作为成都市道路移动源非现场执法的生态环境监管能力建设,建议成都市加快本地标准制定,将成都市遥感设备检测的高排放车辆的CO、HC、NO排放限值设定为2.9%、430×10-6、1 400×10-6。相较于《汽车污染物排放限值及测量方法(遥感检测法)》(二次征求意见稿),该设定补充了对HC排放限值的要求,加严了对CO、NO排放的要求。 (3) 成都市高排放车辆特征分析中,CO、HC、NO同时高排放车辆占比较低,为0.30%。被检车辆与高排放车辆均是国四阶段车辆占比最高,超过60%,但高排放车辆中,国五阶段车辆占比(15.57%)高于国三阶段车辆占比(14.84%),可能与国三车辆更严格的年检要求导致故障车辆的维修和国三车辆中出租车、客车等排放更高的车辆因达到使用年限被淘汰有关。



2.2 污染物排放限值的合理性分析

2.3 高排放车辆特征分析

3 结 论
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
电镀与环保(2018年4期)2018-08-20
北京汽车(2017年5期)2017-11-08
当代医药论丛(2017年22期)2017-04-12
环境保护与循环经济(2017年8期)2017-03-22
电源技术(2015年2期)2015-08-22
绿色中国·B(2015年4期)2015-06-16
电测与仪表(2015年22期)2015-04-09
电测与仪表(2014年6期)2014-04-04
电测与仪表(2014年17期)2014-04-04