
基于张量四元数极化平滑的极化-DOA估计*
2024-01-24 07:37蓝晓宇高佳琦耿莽河王宇鹏
电讯技术 2024年1期
蓝晓宇,高佳琦,耿莽河,王宇鹏
(1.沈阳航空航天大学 电子信息工程学院,沈阳 110136;2.沈阳飞机工业(集团)有限公司,沈阳 110031)
0 引 言
电磁矢量传感器(Electromagnetic Vector Sensor,EMVS)阵列可以同时收到电磁信号携带的空域信息以及极化信息[1-2],而共形阵列是把所有天线单元紧贴载体表面所构成[3-4]的一种特殊天线阵列,具有安装简单、节省空间、空气阻力小以及波束扫描范围广等优点。鉴于共形阵列和EMVS阵列所具有的独特优势,因此研究由EMVS构成的共形阵列(以下简称矢量共形阵列)的极化-波达方向(Direction of Arrival,DOA)联合估计方法有重大意义。
由于多径传播和电磁波干扰,到达天线阵列的信号大多数是相干信号,这会严重干扰信号参数估计的准确性[5],所以估计EMVS的相干信号源参数在空间谱估计中占重要的组成部分。一些改进的二维DOA估计方法,如多重信号分类(Multiple Signal Classification,MUSIC)和通过旋转不变性技术(Estimated Signal Parameters via Rotational Invariance Technique,ESPRIT)估计信号参数,已被用于相干信号的估计[6-8]。文献[9]用双正交偶极子传感器构造锥面共形阵列,运用空间平滑解相干,减少了阵列的孔径和自由度,导致分辨率和精度较差。文献[10]针对相干信号提出了一种主奇异矢量分析法,算法复杂度低,但是估计精度不高,有阵列孔径损失。文献[11]利用完整阵元接收信号矢量构造包含完整信息的Toeplitz矩阵集,通过Hermitian转置矩阵修正进而使协方差矩阵恢复满秩,但算法没有平滑类算法估计精度高。文献[12]提出了极化平滑算法(Polarization Smoothing Algorithm,PSA),以EMVS阵列的极化域导向矢量为不同的权,进而对期望入射相干信号进行解相干,但算法运用四维谱峰搜索,且在低信噪比和小快拍数条件下估计性能较差。四元数模型因为有更强的正交约束性,所以可以更加精确地表现期望信号包含的参数信息[13-15]。然而,以往的大部分工作都是以矩阵的形式获得接收到的数据,忽略了阵列接收数据中固有的多维结构关系,故为了更直观地描述阵列接收数据模型以及数据的分布特性,用张量表示接收数据是一个很好的选择[15]。
综上,本文在柱面矢量共形阵列前提下,综合四元数的正交约束性和张量表示中多维结构关系,提出了一种基于张量四元数极化平滑的相干信号极化-DOA信息估计方法。首先,建立了由四元数表示的柱面共形阵列极化平滑信号模型,并且针对阵列的高维数据结构构造三阶张量模型;然后,利用极化秩亏MUSIC将空域信息和极化域信息分离,通过张量高阶奇异值分解(Higher-order Singular Value Decomposition,HOSVD)对信号子空间估计进行改进,并利用传统子空间方法估计DOA信息;最后,再根据已求出的DOA信息求解信号的极化信息。仿真结果表明,所提算法对相干信号具有更高的估计精度和分辨性能。
1 基于四元数极化平滑阵列模型
1.1 矢量柱面共形阵列信号模型
如图1所示,假设空间有一个矢量柱面共形阵列,由M=MC×MZ个完备的EMVS均匀分布在圆柱载体上构成。该圆柱的半径为r,相邻传感器沿Z轴的间距为λ/2(λ为入射信号波长)。每一个完备的EMVS包含3个电偶极子以及3个磁环,其配置如图2所示。
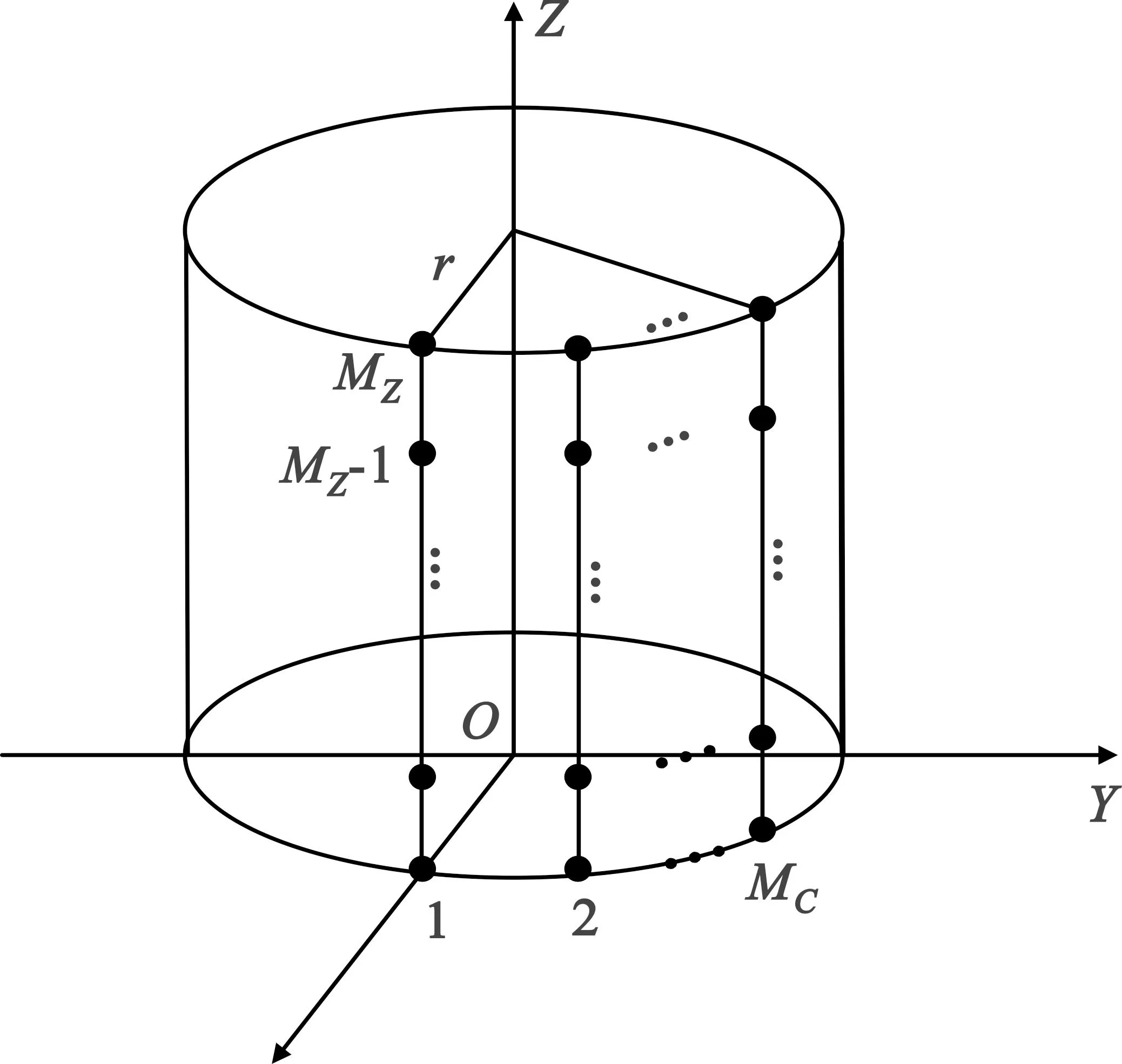
图1 柱面共形阵列Fig.1 Cylindrical conformal array
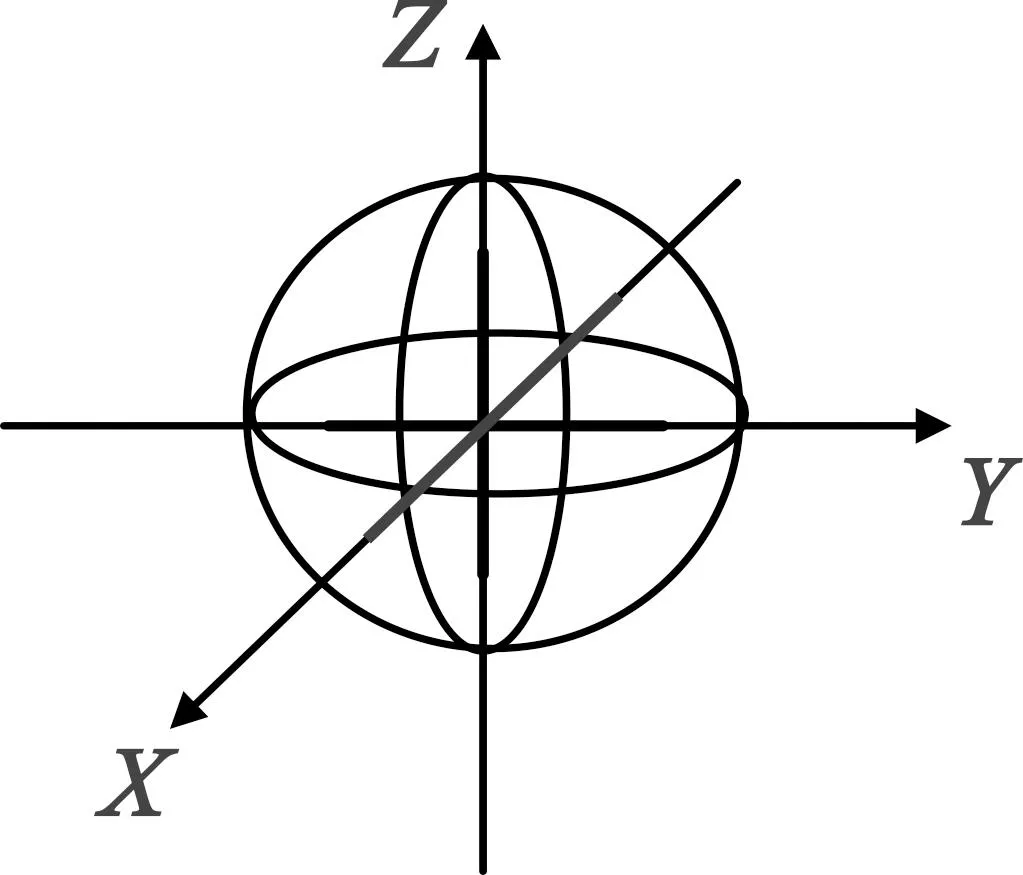
图2 全矢量电磁传感器Fig.2 Full vector electromagnetic sensor
对于第k个入射信号,定义方位角和仰角分别为θk和φk,极化辅助角和极化相位差分别为γk和ηk,k=1,2,…,K,则单个传感器输出的6×1维极化域导向矢量为
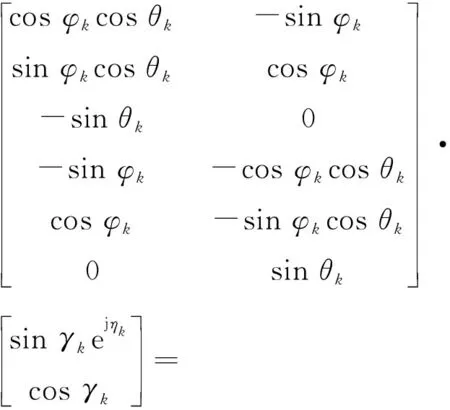
(1)
式中:Ek=(exk,eyk,ezk)和Hk=(hxk,hyk,hzk)分别为第分别为第k个入射信号的电场分量和磁场分量。
共形阵列由于其载体曲率的影响,阵元指向各不相同,因此需要计算在全局坐标系下各个阵元对入射信号的响应函数。为了求出该响应,要对全局坐标系和局部坐标系做欧拉旋转变换,其具体过程详见文献[17],可得第k个信号在全局坐标系下的响应函数g(θk,φk)(这一过程也可以通过离线测试等手段完成)。由文献[17]可知,沿着圆柱Z轴方向的每一列阵元的响应函数是相同的,所以只考虑沿着圆环方向布置的MC个阵元的相应函数gc(θk,φk),c=1,2,…MC即可,故第k个信号的空域-极化域导向矢量a(θk,φk,γk,ηk)为

(2)

当阵列一共有K个相干的远场窄带完全极化电磁波入射到该阵列当中时,该矢量共形阵列的接收信号模型为
X(t)=AS(t)+N(t)
(3)
式中:A为6M×K维导向矢量;X(t)和N(t)为6M×1维接收信号矢量和高斯白噪声矢量;S(t)是K×1维信号矢量。
为了将极化域和角度域分开,定义I为K×K的单位矩阵,则A可以表示为
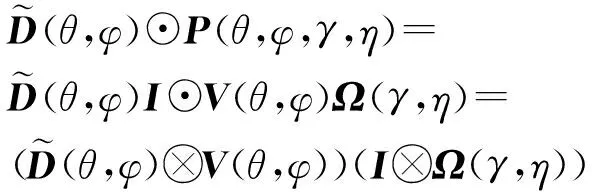
(4)
1.2 极化平滑四元数模型
在四元数域内,根据Cayley-Dickson 表示方法,一个由四元数表示的极化导向矢量包含两个复数域极化导向矢量[15],所以将完备的电磁矢量传感器按照极化分量的标准划分为3组互不重叠的EMVS子阵,如图3所示。
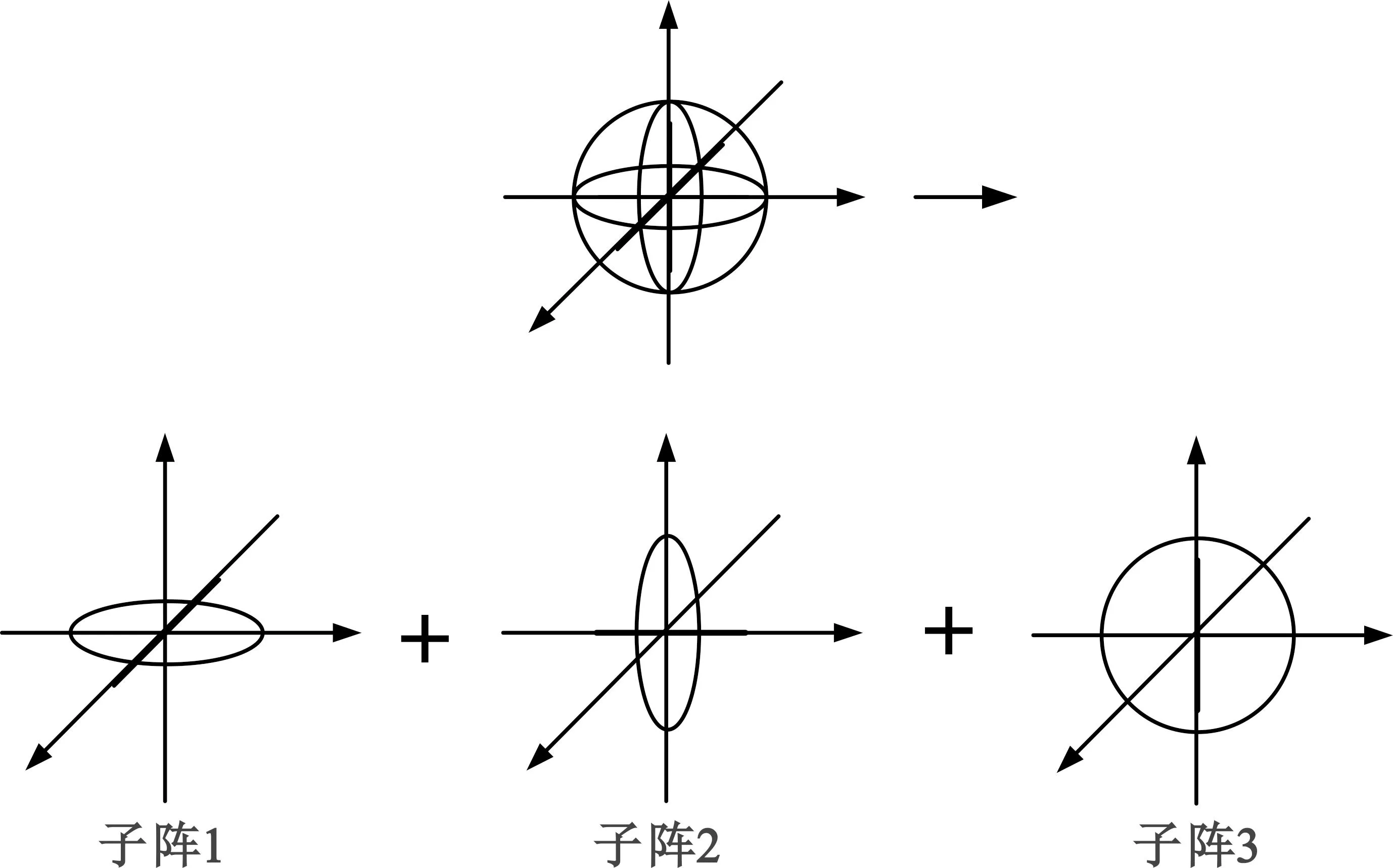
图3 EMVS子阵划分示意图Fig.3 Schematic diagram of EMVS subarray division
将子阵1,2,3分别运用四元数Cayley-Dickson 表示法得到如下3种极化方式:
(5)
(6)

将式(6)展开,如式(7)~(9)所示,可以看到后两组子阵与第一组子阵间分别相差恒定极化分量的比值。
(7)
(8)
(9)
由此,可以得到3个子阵各自的协方差矩阵为
(10)
(11)
(12)
把3个子阵的协方差矩阵取均值,可得极化平滑后的协方差满秩矩阵为
(13)
2 基于张量的改进极化平滑四元数MUSIC算法
2.1 张量极化平滑四元数MUSIC算法

(14)

(15)

(16)

(17)

(18)
对于第m个子阵,m=1,2,3,其张量协方差矩阵可以写成
(19)

(20)
对求得的R进行HOSVD,可得
R=G×1U1×2U2×3U3×4U4
(21)
式中:G∈MC×MZ×3N是核心张量;Un(n=1,2,3,4)是对张量R进行n-模展开后,继而进行奇异值分解所得到的第n个子空间;U1,U3∈MC×MC和U2,U4∈MZ×MZ是正交矩阵。前K个大的奇异值所对应的奇异向量构成n-模信号子空间,所以协方差子空间张量表示为
RS=GS×1U1S×2U2S×3U3S×4U4S
(22)

(23)

(24)


(25)

Q=(D(θ,φ)⊗V(θ,φ))HEN(D(θ,φ)⊗V(θ,φ))
(26)
则目标角度估计函数为
(27)
式中:det[·]表示求行列式值。
γk=arctan(abs(ρk(2)/ρk(1))),k=1,2,…,K
(28)
ηk=angle(ρk(2)/ρk(1)),k=1,2,…,K
(29)
2.2 算法流程
综上所述,基于张量的改进极化平滑四元数MUSIC算法流程可归纳如下:
步骤1 构造张量表示的四元数接收数据模型X,并按照极化分量划分得到子阵。
步骤2 将各个子阵的协方差张量取均值得到满秩的协方差张量R。


步骤5 构造MUSIC空间谱函数,由式(4)可以将空域信息和极化信息分离,通过式(27)~(29)分别求出DOA和极化参数。
2.3 复杂度分析
本节对文献[11]中TOEP算法、文献[12]中PAS算法和本文所提算法计算量进行比较分析,其中M是阵元个数,K为入射信号个数,N为快拍数,n为搜索角度点数。
对于PSA算法和TOEP算法,总计算量相差部分为采样自相关矩阵计算量,前者是O(N(12M)2),后者是O(N(2M)2),故PSA算法总计算量为O(N(12M)2+(4NM)3+n4(4NM+1)(4NM-K)),TOEP算法总计算量为O(N(2M)2+(4NM)3+n4(4NM+1)(4NM-K));本文所提算法的采样自相关矩阵计算量为O(N(6M)2),HOSVD分解计算量为O(32NMK),二维谱峰搜索计算量为O(n2(16NM+4)(4NM-K)),故总计算量为O(N(6M)2+(32NMK)+n2(16NM+4)(4NM-K))。可以明显看出,本文所提算法计算量远小于PSA算法和TOEP算法。
3 仿真分析
在本节中,通过仿真实验将所提算法与TOEP算法和PAS算法进行比较,从而验证所提算法的有效性。阵列设置如图1所示,设Mc=5,Mz=5,沿Z轴的相邻传感器间距为λ/2,最底层圆环阵的半径为3λ。
3.1 相干信号源的二维空间谱图
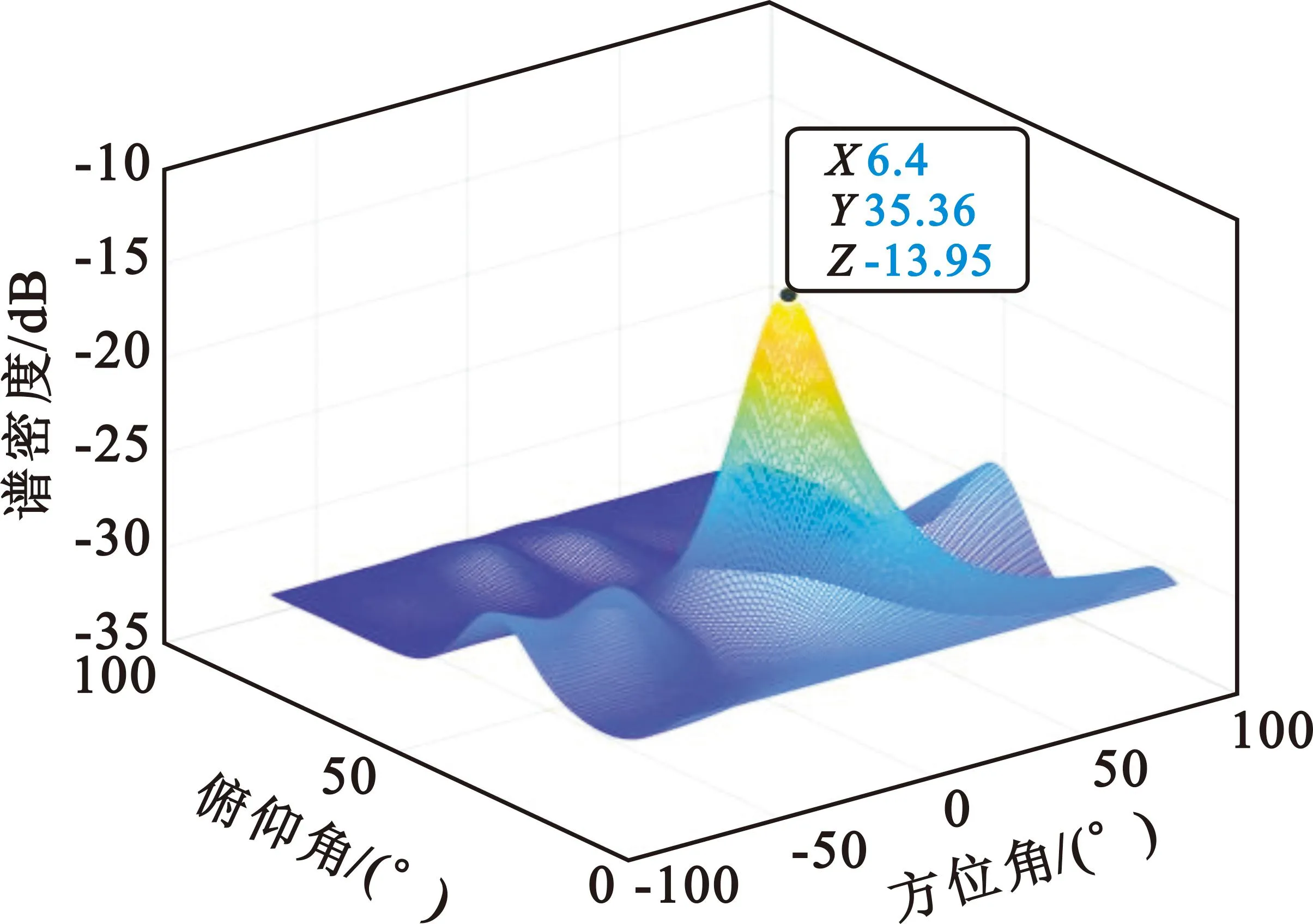
为了验证所提算法的有效性,考虑两个完全相干信号源入射到该柱面共形阵列上,入射参数分别为(θ1,φ1,γ1,η1)=(-12°,36°,20°,7°),(θ2,φ2,γ2,η2)=(15°,35°,24°,25°),信噪比为10 dB,快拍数为100,空间谱搜索步长设置为0.8°,得到的DOA估计结果如图4(a)~(c)所示。根据图4(a)~(c)可知,文献[11]的PSA算法只可以估计其中一个角且误差很大;文献[11]的TOEP算法可以估计出两个角度,但误差较大;而本文所提算法可以准确估计出两个角度,且误差更小,谱峰更加尖锐,增益更高。
当入射相干信号为3个,其中两个参数同上,另一个参数为(θ3,φ3,γ3,η3)=(-25°,55°,71°,24°),阵元数增加为6×6,其他参数不变,仿真结果如图4(d)所示,表明本文所提算法可以对多个入射相干信号进行估计,但是最多估计数量不能超过极化分量个数。
(a)PSA算法
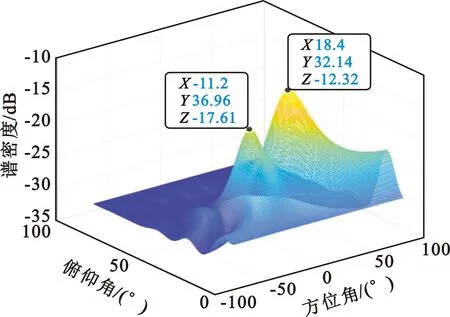
(b)TOEP算法
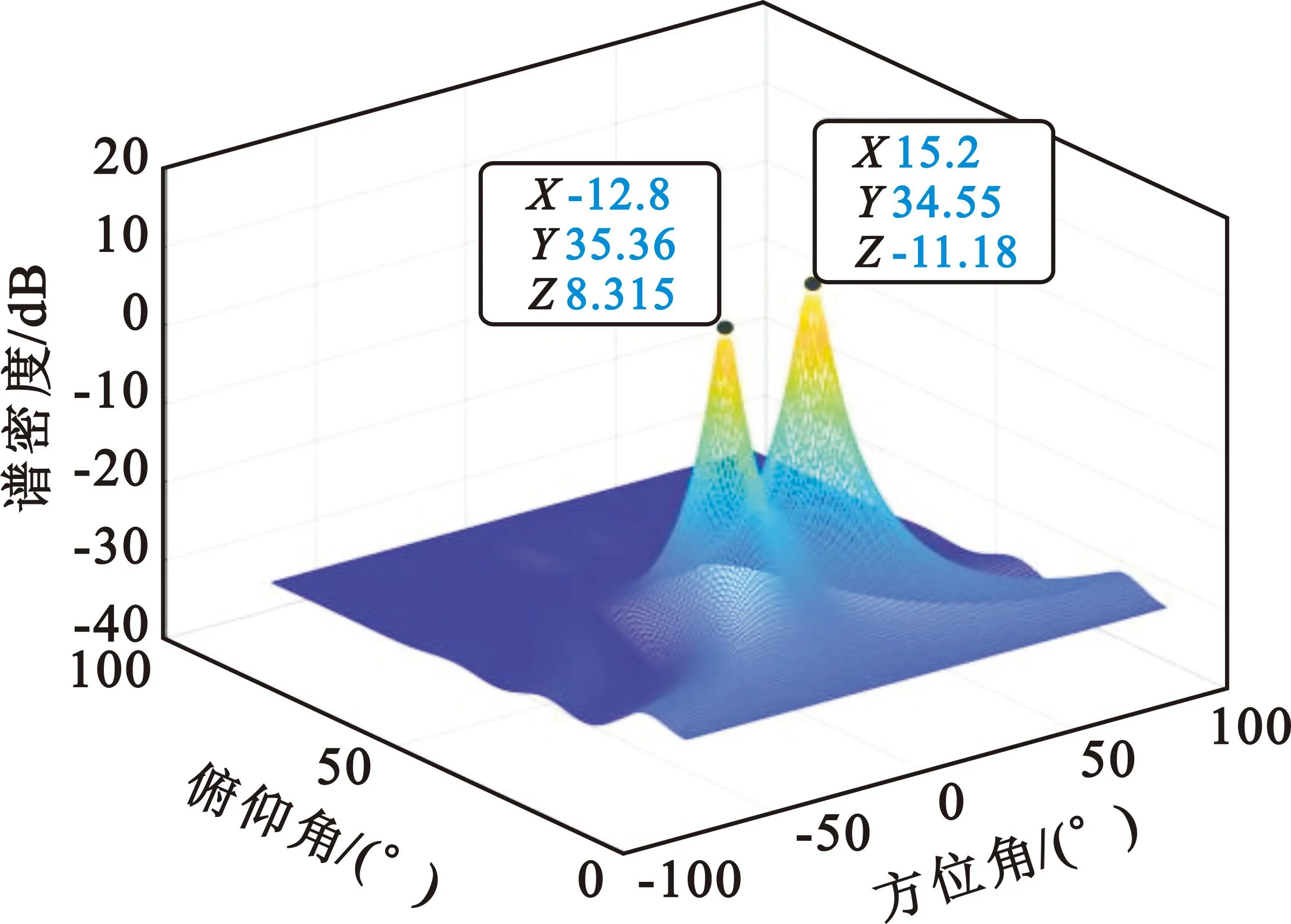
(c)本文算法(K=2)
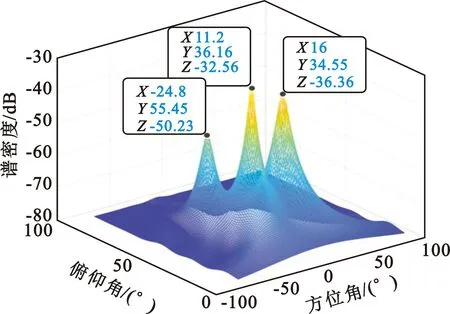
(d)本文算法(K=3)图4 相干信号源的二维空间谱图Fig.4 Two dimensional spatial spectrum of coherent signal sources
3.2 算法估计精度随参数变化关系
用均方根误差来衡量估计精度。设入射参数分别为(θ1,φ1,γ1,η1)=(35°,-4°,56°,12°),(θ2,φ2,γ2,η2)=(51°,20°,71°,24°)。在快拍数为30,信噪比从-15~10 dB变化的条件下,分析信噪比对估计精度的影响,其仿真结果如图5所示;在信噪比为-5 dB,快拍数从10~150变化的条件下,分析快拍数对估计精度的影响,其仿真结果如图6所示。实验结果数据均由100次蒙特卡罗实验获得,搜索步长均为0.8°。
由图5和图6的仿真结果图可以看出,估计精度均随着信噪比和快拍数的增大而增大。但是在低信噪比(-15~5 dB)时,本文所提算法的DOA和极化参数的估计精度都明显高于PSA算法和TOEP算法;当信噪比大于5 dB时,3种算法估计精度趋于稳定,且提出算法精度更高。在小快拍数(10~50)时,所提算法的估计精度高于PSA算法和TOEP算法;随着快拍数的增大,所提算法的精度略高于其他两种算法。所提算法的估计均方根误差最终稳定在0.5°以内,满足实际工程的要求。
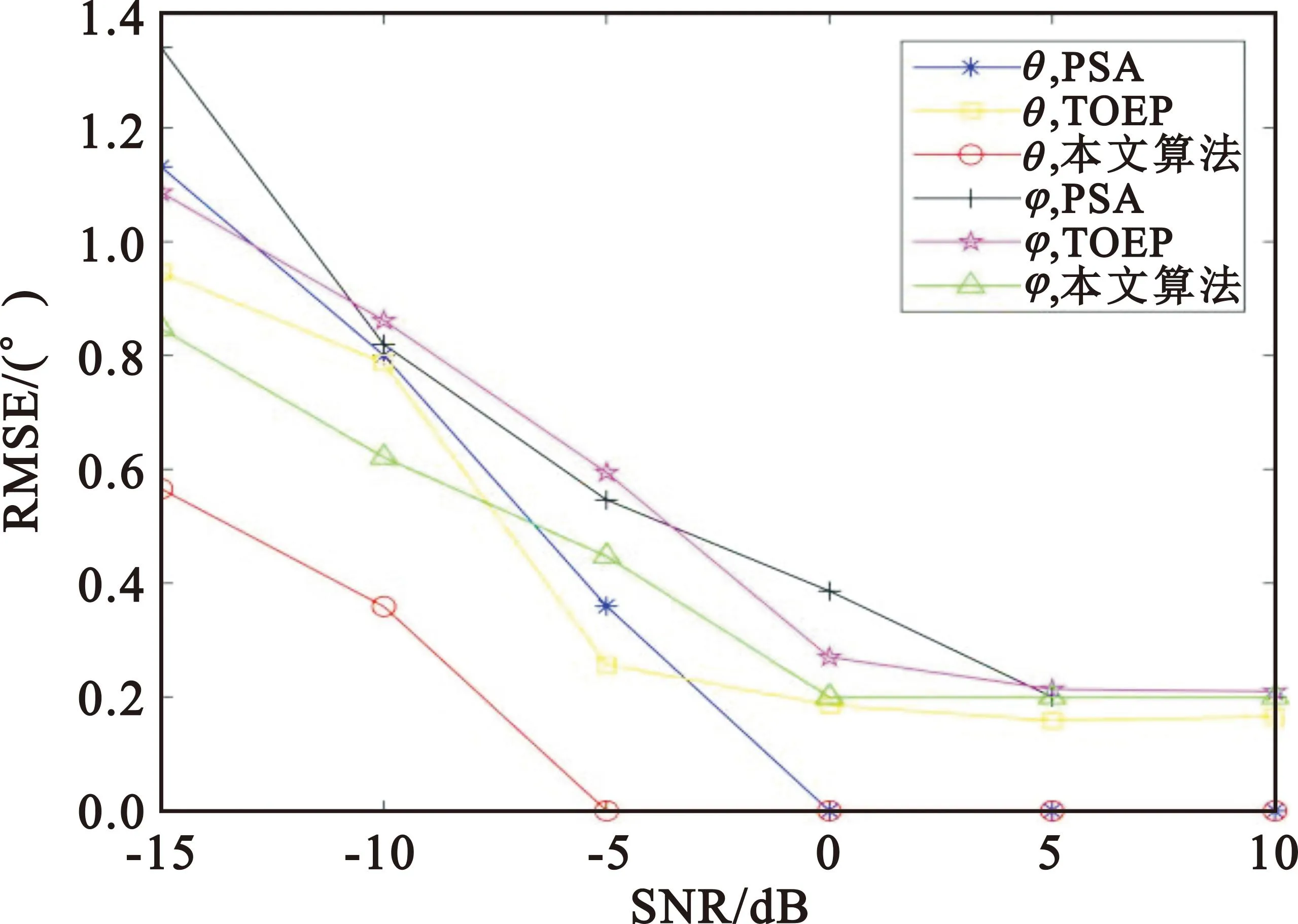
(a)空域参数的估计精度随SNR变化关系
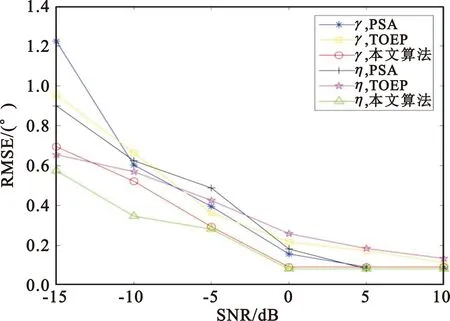
(b)极化域参数的估计精度随SNR变化关系图5 估计精度随信噪比变化关系Fig.5 The RMSE versus SNR
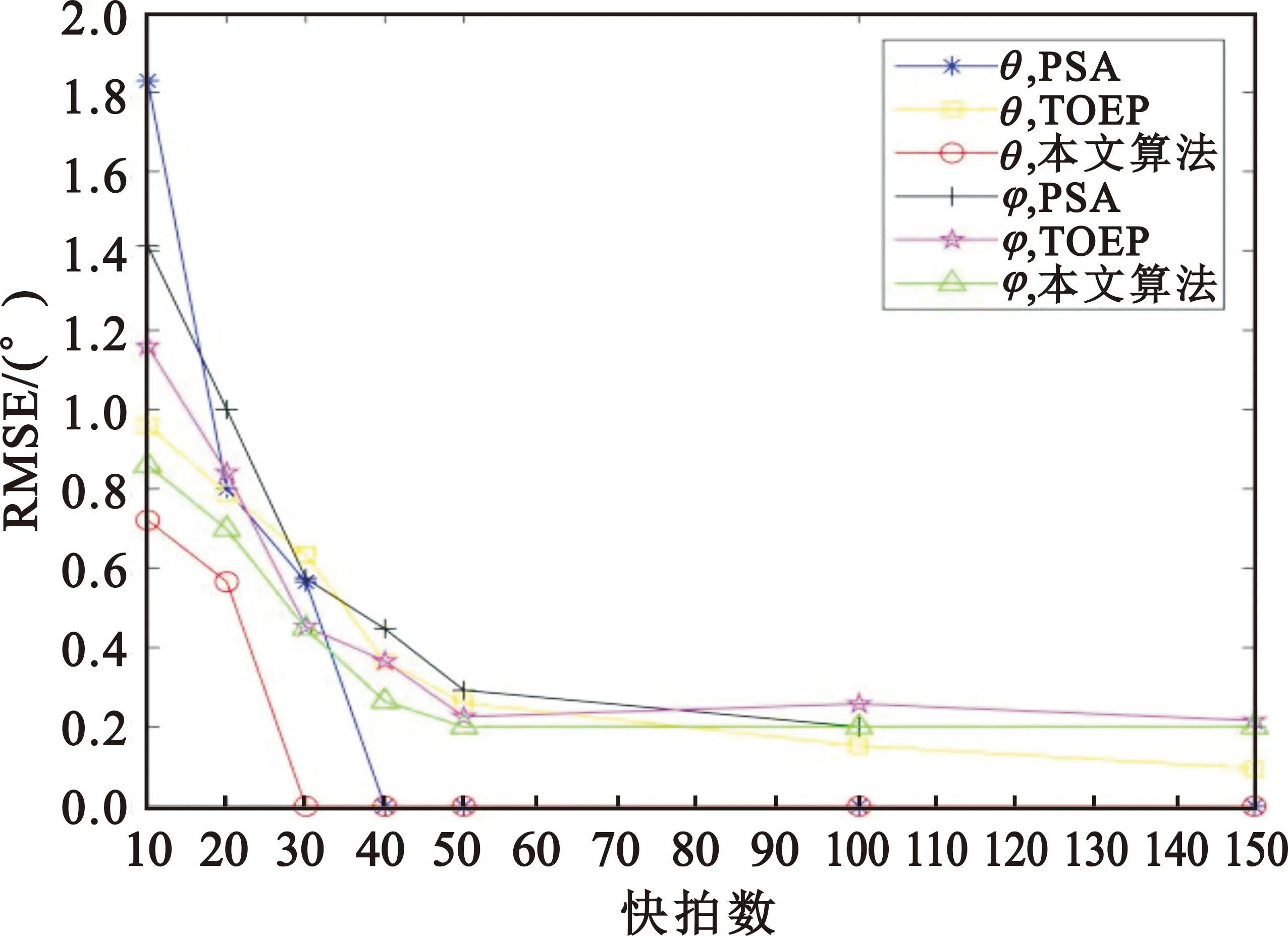
(a)空域参数的估计精度随快拍数变化关系
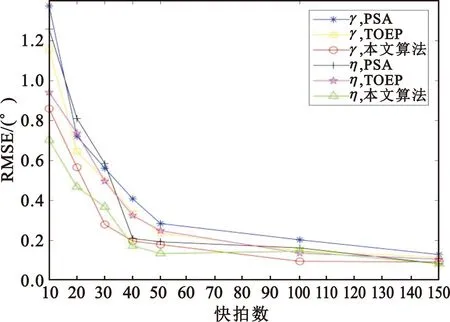
(b)极化域参数的估计精度随快拍数变化关系
3.3 算法成功分辨率随参数变化关系
图7是算法成功分辨率随信噪比和快拍数变化的对比图。在此仿真中,成功分辨的定义为信号各个角度参数的估计值与真实值的误差均小于0.5°。在快拍数为40,信噪比-10~2 dB变化的条件下,其成功分辨概率随信噪比变化如图7(a)所示;在信噪比为-6 dB,快拍数5~150变化的条件下,其成功分辨概率随快拍数变化如图7(b)所示。由仿真结果图可知,所提算法在低信噪比(-10~-2 dB)和小快拍数(5~100)时,信号估计的成功概率明显高于PSA算法和TOEP算法,进一步验证了所提算法的有效性。
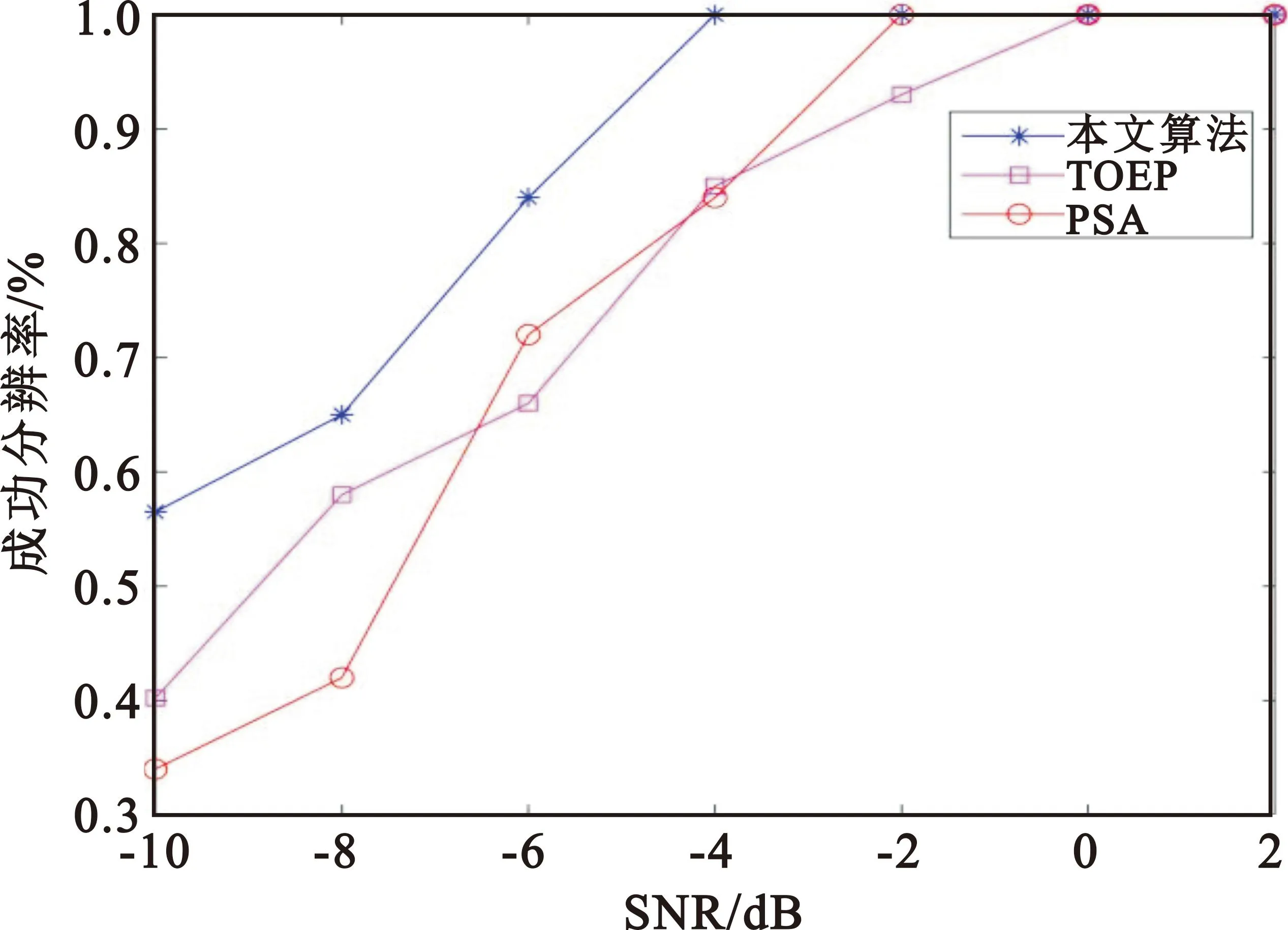
(a)成功分辨率随信噪比变化关系
4 结 论
本文提出了一种适用于柱面矢量共形阵列的张量四元数极化平滑MUSIC算法,采用张量建模的方式,结合信号的四元数极化域信息实现解相干。该算法只需进行空间参数和极化参数的二维估计,因而减少了算法运算量;同时由于张量模型的多维数据中包含的更多信息,所以也提高了估计精度。仿真结果验证了上述分析结果的正确性以及该方法的有效性。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
数学物理学报(2021年1期)2021-03-29
成都信息工程大学学报(2021年6期)2021-02-12
五邑大学学报(自然科学版)(2020年4期)2020-12-09
数学年刊A辑(中文版)(2019年1期)2019-01-31
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
自动化学报(2016年8期)2016-04-16
河南科技(2014年19期)2014-02-27
土木建筑工程信息技术(2013年5期)2013-10-17
