基于线性自抗扰控制技术的伺服控制系统研究*
2024-01-15 06:56孙天夫李鑫宇谭先锋郑登华
电气工程学报 2023年4期
夏 亮 孙天夫 李鑫宇, 谭先锋 郑登华
(1.重庆智能机器人研究院 重庆 400000;2.中国科学院深圳先进技术研究院 深圳 518000;3.燕山大学机械工程学院 秦皇岛 066004)
1 引言
伺服系统在数控机床、航空航天、军用武器随动系统以及机器人等领域具有极其广泛的应用[1-4]。近年来,永磁同步电机因高转矩电流比、转矩波动小、调速范围广等优点在工业领域获得了广泛应用[5-6]。随着科技的发展,工程中对于伺服控制系统的快速性、准确性和控制参数易于整定的需求也不断增加,另外在实际应用中永磁同步电机(Permanent magnet synchronous motor, PMSM)作为一个非线性、强耦合的时变复杂系统,会遭遇外部扰动(负载转矩的变化)和内部扰动(参数摄动)等干扰,使得PMSM 控制技术一直都是研究热点。针对以上问题,学者们进行了大量研究,一方面,继续以经典的比例-积分-微分(Proportional-integralderivative, PID)控制器为基础,研究控制参数的自整定[7]、参数辨识[8]等,另一方面则试图将一些先进的控制算法,如滑模变结构控制、自适应控制以及预测控制[9-12]等,应用在PMSM 伺服系统中。
针对控制对象的外部和内部扰动,韩京清[13]在PID 控制思想的基础上提出了自抗扰控制器(Active disturbance rejection control, ADRC)。ADRC 将被控对象的各种不确定因素包括内部扰动和外部扰动归结为总扰动,采用扩张状态观测器(Extended state observer, ESO)对总扰动进行估计,然后进行扰动补偿。ADRC 具有超调量小、精度高、抗干扰能力强和不严重依赖模型的特点,目前已经在电力系统、化工过程、精密加工机床等领域得到了推广和应用[14-17]。但由于ADRC 采用了非线性函数,需要整定的参数过多,稳定性难以分析,限制了ADRC 的工业应用前景。GAO[18]将ADRC 进行了线性化处理,提出了线性自抗扰控制器(Linear active disturbance rejection control, LADRC),并提出了基于时间尺度的整定方法,将LESO 和状态反馈的设计转化为控制器带宽(cω)和观测器带宽(0ω)的选取,大大简化了LADRC 的参数整定过程,开拓了LADRC 的工业应用前景。沈威等[19]通过将ADRC与改进型ESO 并联并结合乌鸦算法(Crow search algorithm, CSA)对ADRC 进行参数优化,提高了电机控制系统的鲁棒性。刘长良等[20]基于内模原理提出自抗扰控制方法,应对非最小相位系统建模和扰动不确定性。该方法首先依据被控对象参数设计内模控制器,其次利用动态史密斯补偿器补足闭环系统的零点,解决非最小相位部分导致的响应滞后和反向响应幅值过大问题。最后,利用被控对象模型设计的扰动观测补偿器(Disturbance observer and compensation, DOC)增强系统扰动抑制能力。
本文将线性自抗扰控制理论应用于伺服驱动系统,设计了电流环一阶LADRC 控制器、速度环一阶LADRC 控制器以及位置环二阶LADRC 控制器。其中,位置控制系统采用双环的结构,实现了位置和速度的复合精准控制,给出了相应的参数整定方法,与传统的伺服系统相比,需要调试的参数大大减少,并通过试验对LADRC 的控制性能进行了研究。
2 线性自抗扰控制原理
以二阶系统为例,二阶系统微分方程一般形式为
式中,w(t) 为外部扰动,b为系统增益,u为输入,f为系统总扰动。实际中b很难得到,这里用b0作为b的估计值,则式(1)可化为
将估计不准的部分 (b-b0)u并入f中,可将微分方程化为状态空间方程形式,令
式中,3x为系统扩张状态变量,即把原来的2 阶系统扩展成3 阶系统,从而多了一个方程用于求解人为设定的f。这里把所有与输入无关的项f视为系统总扰动,状态空间方程形式为
式中,x为列向量形式。其中这一项可以通过观测器获得,因此在设计观测器时不考虑该项。
对该系统可建立线性扩张状态观测器(ESO)
式中,z为对x观测状态向量;为y的观测值;L为状态观测器的反馈增益。
由式(6)中两式相减得到
该微分方程的解为error= exp[(A-LC)t],当(A-LC)为负值时,error会收敛到0。因此可通过设计(A-LC)矩阵的特征值使得状态向量z收敛至x来实现状态观测。
将L=[β0β1β2]T代入(A-LC)可得
这里将该系统三个极点配置在相同位置,则该矩阵的特征多项式为
式中,0w为系统极点的值,0w决定了观测器的收敛速度,这里称之为观测器带宽。
通过解式(9)可得
在观测器对总扰动f(即x3)进行观测之后,即可对控制器进行扰动补偿
式中,u为补偿后的输出,将补偿后的u代入式(2),得到
至此,包含扰动的二阶系统被化简为一个不含扰动的二阶系统。对于二阶系统,使用PD 控制器设计u0,则其表达式为
式中,r为参考值,一般为定值,则r˙为0。把式(13)代入式(12)可得
配置上式极点为
得到PD 参数值
式中,cw为系统极点的值,同理将系统极点配置在相同位置。cw决定了控制器的收敛速度,称之为控制器带宽。一般在进行设计时,观测器带宽为控制器带宽的三到五倍。
3 伺服电机系统线性自抗扰控制器设计
3.1 电流环控制器设计
伺服系统dq轴电流表达式如式(17)所示
式中,以q轴电流控制为例实现线性自抗扰控制,uq相当于输入,称为u,为系统增益,称为b,其他项视为总扰动,称为f,iq为输出,称为y。
由于控制电流微分方程为一阶,在这里采用一阶线性自抗扰控制器。其原微分方程为
式中,b可根据实际测量获得,也可以进行估计,这里用b0作为b的估计值。其他估计不准的部分也可并入f。则式(18)可写为
令
可将微分方程化为状态空间方程
式中,2x为系统扩张状态变量,这里为系统总扰动,x为列向量形式,C=[1 0]。
对该系统可建立线性扩张状态观测器(ESO)
由前文可知L的取值,这里不再赘述,则ESO 可以写成
展开上式为
在观测器对总扰动f进行观测之后,即可对控制器进行扰动补偿
式中,u为补偿后的输出,将补偿后的输出代入原微分方程,得到
对于一阶系统,使用P 控制器设计u0,则其表达式为
将上式写成传递函数形式为
式中,kp为控制器带宽。
3.2 速度环控制器设计
速度环经常会面临PMSM 参数不确定、负载转矩变化等扰动。
根据电机动力学模型
式中,w为电机转速,tk为转矩系数,J为转子转动惯量,LT为负载转矩,B为黏滞摩擦因数。
由微分方程可以得到速度环控制与电流环具有类似的形式,同样为一阶微分方程。其中电流i为系统输入,为系统增益,其他项为总扰动。速度环的LADRC 设计与电流环相同,这里不再赘述。
3.3 位置环控制器设计
位置环控制同样可以看成由速度控制的一阶微分方程
位置环的LADRC 设计同样可以采用前文所述一阶LADRC 设计理论进行设计。
4 仿真分析
为了验证前文所提算法的性能,在永磁同步电机伺服控制系统中对算法进行仿真分析,仿真中所使用的PMSM 参数如表1 所示。

表1 PMSM 仿真参数
仿真系统采用电流环、速度环、位置环三环闭环控制。各控制参数如表2 所示。

表2 控制系统三环控制参数
下面对比LADRC 与PI 控制器在电流环、转速环、位置环的控制效果。
首先对比LADRC 电流控制器与PI 电流控制器的电流控制效果。如图1 所示,阶跃电流幅值命令设为10 A,当LADRC 电流环带宽与PI 电流环带宽相同时,两种控制器的电流控制效果几乎等价,因此可以优先考虑PI 控制器,以减少电流环计算量。

图1 LADRC 电流控制器与PI 电流控制器的电流控制效果对比
保持上述LADRC 和PI 电流控制器参数不变,增加LADRC 和PI 速度控制器,并将LADRC 和PI控制器的速度环带宽调节至相近,则基于PI 电流环、速度环的转速控制效果;基于LADRC 电流环、速度环的转速控制效果;基于LADRC 速度环和PI电流环的转速控制效果如图2 所示。

图2 LADRC 速度控制器与PI 速度控制器的转速控制效果对比
如图2 所示,阶跃转速命令设为100 rad/s,虽然PI 转速控制器和LADRC 转速控制器对转速阶跃命令响应的上升时间相同,但是PI 控制器会导致明显的振荡和超调,这是由于 PI 控制器无法像LADRC 控制器一样,把速度环转化为一阶系统。因此在速度控制上,LADRC 控制器具有更好的动态性能。另外,图2 也展示了PI 电流控制器与LADRC 速度控制器组合的控制效果,其控制效果与电流、转速均由LADRC 控制的效果等价,进一步说明了LADRC 和PI 控制对电流控制的等价性。
为了测试LADRC 和PI 速度控制器对扰动的鲁棒性,在t=4 s 时开始增加电机负载,则电机电流也随之增加。如图2 所示,随着负载和电流的爬升,基于PI 速度控制器的转速有明显波动,而基于LADRC 转速控制器的转速控制结果展现出明显的抗干扰性。
保持上述LADRC 和PI 控制器参数不变,增加LADRC 和PI 位置控制器,则基于PI 电流、速度、位置控制器的位置环控制效果;基于LADRC 电流、转速、位置控制器的位置环控制效果;基于LADRC电流、位置控制器和PI 速度控制器的位置环控制效果如图3 所示。
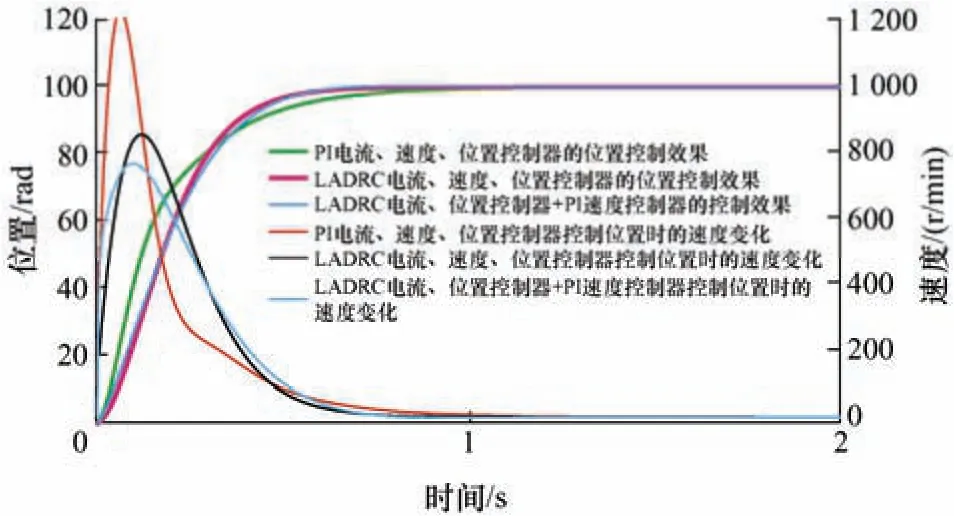
图3 LADRC 位置控制器与PI 位置控制器的位置控制效果对比
如图3 所示,阶跃位置命令设为100 rad,并将基于PI 位置控制器和LADRC 位置控制器的位置阶跃响应时间调节至相近,则基于PI 三环控制的速度响应峰值最大,基于LADRC 三环控制的速度响应峰值次之,基于LADRC 电流、位置控制器和PI 速度控制器的电流响应峰值最小。这主要是由于PI位置环没有前馈扰动补偿和PI 速度环调节时间较长导致。同样地,为了验证LADRC 和PI 位置控制器对扰动的鲁棒性,在t=4 s 时开始增加电机负载。三种控制方式的控制效果如图4 所示。
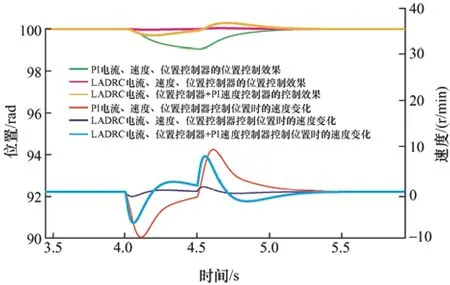
图4 LADRC 位置控制器与PI 位置控制器在扰动下的控制效果对比
如图4 所示,基于LADRC 的三环控制对扰动具有很强的鲁棒性,在扰动下位置波动和转速波动都最小。基于LADRC 电流、位置控制器和PI 速度控制器的三环控制对扰动具有一定的鲁棒性。基于PI 的三环控制对扰动的鲁棒性最弱。因此基于LADRC 位置控制相对于PI 控制器的位置控制也有明显的优势。
5 结论
本文将线性自抗扰控制理论应用在永磁同步电机控制系统中,给出了电流环、速度环和位置环的LADRC 控制器设计方法。并通过分析仿真结果的方式探究了LADRC 与PI 控制器相互组合对伺服电机位置控制的影响,从仿真结果中得出以下结论。
(1) LADRC 与PI 作为电流内环效果几乎等价。
(2) 对于速度环与位置环而言,LADRC 控制器的动态性能和对扰动的鲁棒性相对PI 控制器具有明显的优势。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
农业机械学报(2020年2期)2020-03-09
数学物理学报(2019年4期)2019-10-10
中华建设(2019年7期)2019-08-27
贵州师范学院学报(2016年3期)2016-12-01
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电源技术(2015年11期)2015-08-22