自动化技术在矿山机电控制中的实际应用研究
2024-01-04 11:53卞泽宇
机械管理开发 2023年11期
卞泽宇, 乔 芳
(潞安职业技术学院, 山西 长治 046000)
0 引言
近几年,我国的煤炭产量依旧持续上涨,在未来的几年煤炭资源仍然作为国内主要能源地位不会改变。由于煤矿机电设备较为落后,从而就导致了低生产率、高劳动强度以及高作业风险等问题。因此,尽量提升井下工作面的自动化程度、降低一线工人的数量,最终形成井下“无人值守”的目标,将成为未来煤炭行业主要的发展方向。以山西某矿一次采全高工作面为对象,将自动化技术应用到采煤机的控制工作以及监测系统中,实现了工作面生产的自动化,在一定程度上提升了该企业的生产效率。
1 采煤机自动控制技术改进
1.1 传统记忆截割技术
记忆截割技术就是采煤机的滚筒在运行过程中可自行调整,随着回采工作面的推进可进行上升或下降的动作[1]。主要原理如图1 所示,将回采空间看作是一个立体的三维模型,X 方向为采煤机牵引方向,Y方向为采煤工作面推进方向,Z 方向为截割滚筒高度调整方向,依照坐标记录滚筒截割轨迹,并自动控制采煤机循环上一次的截割动作,这个过程被称作记忆截割。但是,目前应用到实际中的记忆截割技术还有很多的不足,主要有以下原因:现有的记忆截割技术无法适应煤层赋存的复杂地质条件;再者,由于煤层顶底板存在相对移动的情况,这会导致滚筒在截割第二刀的时候与第一刀的轨迹不一致,甚至会造成截齿的损坏。
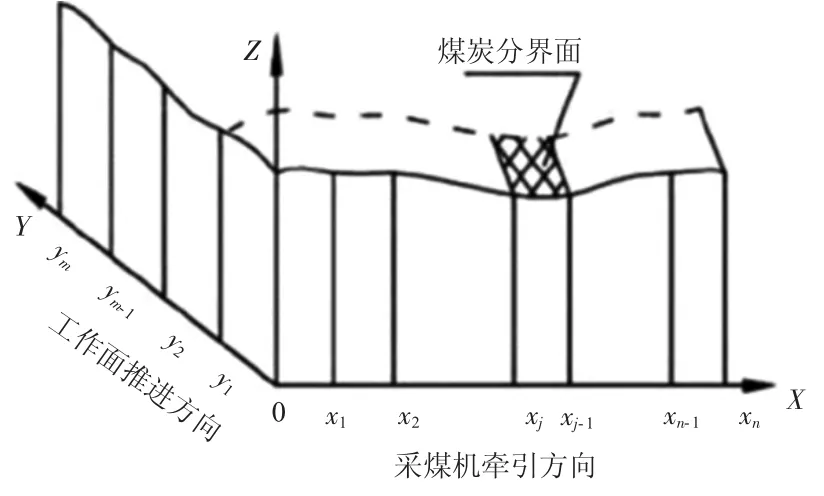
图1 采区煤层分布示意图
综合以上分析,传统的记忆截割技术还有一定的局限性,不能准确地识别煤岩层的分界,所以有必要对现有的记忆截割技术进行优化改进。
1.2 记忆截割自动调高系统
在采煤机的截割过程中,要对记忆截割信号进行采集,若相邻两次采样间隔时间过短,会降低系统控制器的处理速度,如果相邻两次采样时间过长,又会使得计算的误差过大。因此,当完整记忆采煤机的截割轨迹后,从第j(j=i+1)个循环算起,之后的工作循环都让采煤机保持自动控制状态。依照其自身存在的地点Xi,采煤机会对摇臂的高度以及机组的牵引速度进行自动化调节,从而重复上一个循环留下的截割轨迹。且若采煤机在截割过程中遇到矸石,系统会对矸石的尺寸进行判断,如果矸石尺寸过大就会采用截割躲避策略,经由多种传感器的数据集成系统展开检测,同时更改此循环的截割轨迹;如果尺寸过小则会对矸石进行强行切割动作。
2 采煤机监测系统的自动化设计
2.1 采煤机位置检测
该技术主要采用光栅技术原理,位移检测可由光栅感应。通常,采煤机位置测量控制系统主要由光栅感应器和光栅位移传感器所构成。在这种处理过程中,主灯与指示灯之间可彼此重叠融合,产生强大的重叠光。再经过相干叠加后光源的辐射,形成较强的莫尔条纹,接着再经过相应排列的电子光学元件接收条纹,再转换成相互正交的电压信号。这两个电压信号作为后期处理所需的原始信号,最后通过传感器对信号进行电路进一步分析,确定采煤机的具体位置。
2.2 采煤机运行状态的实时监控
在判断采煤机的位置后,有必要对其运行状态进行实时监控。其运行是否安全稳定,直接关系到煤矿企业的整体经济收入。因此,采煤机要相对较强的适应性以及运行平稳性。一般情况下,采煤机监控参数对象大致可分为内部参数和外部参数。其中,内部参数的监测主要是关于机器运行的一些数据参数,如采煤机的温度;外部参数的监测主要是通过设置在采煤机外部的传感器来获得某些数据参数的具体信息,如瓦斯浓度[2],如图2 所示,为采煤机的运行状态监测参数示意图。
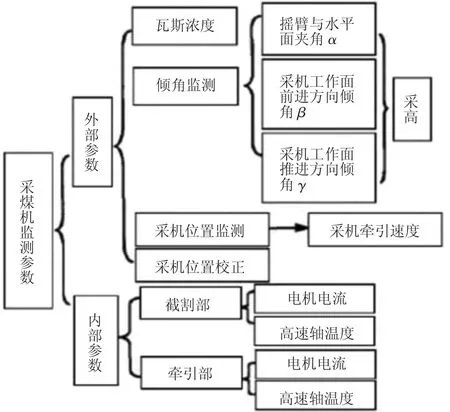
图2 采煤机的运行状态监测参数示意图
2.3 采煤机状态监测及监测目标
2.3.1 外部参数的监测
1)工作面的瓦斯浓度大小。主要经由技术较为完备的瓦斯浓度传感器,将采集到的输出电信号或者光信号传输到PLC 控制器中,通过控制器的处理将其反馈到地面远程监控中心,以便工作人员及时处理。
2)工作面的倾角大小。工作面推进方向和推进方向有一定的倾角。然而,在自动监测系统中,主要监测以下两个角度,即采煤机的摇臂中心轴线与水平面夹角α、采煤机作业面沿前进方向的倾角β。利用采煤机高调整的计算公式和已知设备参数相结合,即可得出更准确的采煤机采高H 的推导式[3],如图3 所示,为采煤机在一定水平条件下的调高模型。
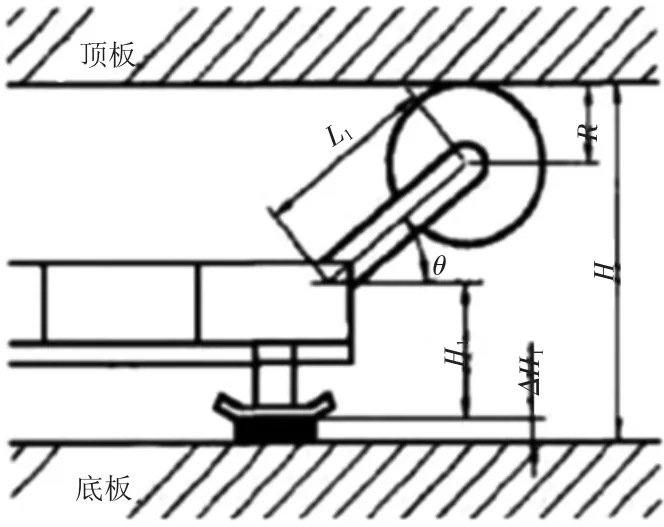
图3 采煤机在水平条件下的调高模型
但在工程实践中,工作面底板岩层往往处于不理想的水平状态,且存在一定的倾角即β,同时角θ 的大小难以测量,所以要换一种思路:经由实际测量可以得到摇臂与水平面夹角α,当摇臂处于水平面之上时该角度为正,反之则为负,所以α=θ+β,进而推出θ=α-β。因此,采煤机采高H 的表达公式如下:
式中:ΔL 为摇臂与机身的连接点到支腿中心的水平距离,mm;H1、ΔH1、L、ΔL、R 均表示采煤机的固定结构,通过核对采煤机型号获得,ΔH1一般取0;α、β 的取值可正可负,都是通过监测系统相对地标水平测量获得。
2.3.2 内部参数监测
1)采煤机电机电流监测。考虑到电流流经电机时会出现热效应,此现象能够使得电机表面的温度上升从而烧毁电机。因此要对采煤机运行过程中的电流大小进行实时监测。采用电流传感器收集牵引部及截割部电机的电流模拟量,并将其传输到PLC 控制器中进一步处理,从而可得知电流量的大小,以便于工作人员及时处理。
2)高速轴温度监测。考虑到电机运行空间小,当驱动电机为牵引部分和切割部分供电时,产生的功率往往比较大,进而电机的高速轴就会产生较高的温度。所以要在该位置增设温度传感器,实时采集电机主轴的温度大小保障轴承不会由于温度高而损坏。
3 应用效果分析
山西某矿901 工作面为9 号煤层三采区大采高综采工作面,走向长1 084 m,倾斜长220 m。工作面地质储量210 万t,煤层可采储量180 万t。其中9 号煤层最大煤层厚度6.52 m,最小煤层厚度6.25 m,平均厚度6.43 m,煤层平均倾角7°,赋存地质条件相对稳定,构造简单。然而,煤层的结构极其复杂,其中存在不稳定的矸石3 层,上层矸石厚度为0.13 m,中间矸石厚度为0.12 m,下部矸石厚度为0.13 m,如图4 所示,为工作面的布置示意图。

图4 工作面的布置示意图
901 工作面应用的采煤机型号为SL-1000,这种型号的采煤机其功率可达2 390 kW,一次采全高可达7.2 m。考虑到煤层的复杂结构,因此采用传统的记忆截割技术达不到生产要求,因此,将本文改进后的记忆截割技术以及运行状态监测系统应用到该型号采煤机中。它可以根据实际情况设计切割轨迹,并通过监测数据实时调整开采高度,真正实现了采煤机的全自动操作。
4 结语
本文将自动化技术应用到了采煤机的控制工作中,在对传统控制技术改进之后,又对采煤机的监测系统进行了设计,在一定程度上减少了井下的工作人员数量的同时又增加了工作面的回采率。此技术的成功应用,为相关企业提供了很好的实践模型,为从事相关研究的专家学者指明了研究方向。
猜你喜欢
金属加工(冷加工)(2023年1期)2023-02-04
山西冶金(2022年3期)2022-08-03
防爆电机(2022年1期)2022-02-16
陕西煤炭(2021年6期)2021-11-22
煤炭与化工(2021年5期)2021-07-04
再生资源与循环经济(2021年7期)2021-04-09
水泥工程(2020年4期)2020-12-18
河南工学院学报(2017年1期)2017-06-07
河南科技(2014年18期)2014-02-27
河南科技(2014年7期)2014-02-27