咽拭子采样软体夹持器结构设计与优化
2024-01-03 04:43武力李学涛鞠尔男徐华伟
大连交通大学学报 2023年6期
武力,李学涛,鞠尔男,徐华伟
(大连交通大学 机械工程学院,辽宁 大连 116028)
传染性疾病一直是影响人类身体健康的症结之一,为了降低医护人员在传染病检测时的感染概率和劳动强度,使用机器臂及夹持器来代替医护人员进行传染病检测,对传染病的防控具有非常重要的意义。
目前常见的柔性夹持器主要分为主动型夹持器和被动型夹持器[1]。主动型柔性夹持器是指由人类手指或者自然界软体生物启发而设计的夹持器。Rodrigue等[2]采用记忆合金材料设计制作了一种柔性末端执行器,多个柔性执行器协同作用组成夹持器,从而实现对目标的抓取。Chen等[3]根据织物具有各向异性、可拉伸性和内在高强度的特性研制出了一种软体执行器,并且使用三个执行器制成了一个软体夹持器,夹持器能够在一定范围内抓住各种形状、刚度和重量的物体。Abeach等[4]根据阻塞原理研制了一种气动肌肉去抓取物体。被动型柔性夹持器是指通过柔性材料被动贴合夹持对象表面,与夹持对象表面形成可靠约束。Song等[5]根据纤维胶黏剂在可变形膜上的黏附特性,研制了一种由弹性体蘑菇状微纤维覆盖的可充气膜的软夹具。Hao等[6]基于一个软的圆柱形手风琴结构研制了一种夹持器,其中包含耦合的平行流体通道,通过从单个流体端口提供的压力来控制夹持器运动。以上夹持器主要是通过柔性体弯曲的方式对目标进行抓取及夹紧,无法带动目标完成精细的动作。
面对多样化的工作场合,单一的弯曲运动已经无法满足软体夹持器的应用,研究扭转结构的软体夹持器十分必要。Connolly等[7]研制了一种绳缠绕式软体执行器,可实现执行器的扭转。Sanan等[8]研究了螺旋气腔充气式扭转执行器机器人。Tsukagoshi等[9]利用皮亚诺曲线制动的原理研制了扁平管执行器,实现软体执行器的扭转运动。Kargov等[10]将软体机器人的气腔设计成类似于手风琴式的气囊,设计了一种模块化机器人系统。
本文所设计的夹持器主要应用夹持咽拭子检测装置进行核酸检测工作,考虑到夹持器的工作场合以及实际的运动形式,本文选用螺旋驱动的方式来实现旋转运动。 同时在夹持器中设置了安全保护装置,通过感应检测装置传递力的大小,控制安全保护装置,从而减少对被检测对象的伤害。
1 夹持器结构设计
咽拭子软体夹持器包括端部限制层、螺旋气腔层、安全装置层,3部分通过对应位置紧密连接,形成一个紧密的整体,其整体结构示意图见图1。
为了防止气腔形变导致顶部平面不规则, 从而影响检测装置(咽拭子)的运动,端部限制层采用硬质不变形材料。端部限制层开有咽拭子夹紧腔,与扭转气腔层的夹紧腔相对应。扭转气腔层内部含有螺旋气腔,多个气腔沿中心轴线均匀分布。安全装置层包括进气孔及安全装置腔,其中进气孔与螺旋气腔相对应,进气口内插入气管并用硅胶密封,保证气密性,气管连接外部气泵给气腔提供气压。安全保护装置包括磁流变液以及压力传感器。安全装置腔与夹紧腔相对应,在安装咽拭子检测装置时使其能够与压力传感器相贴合。

图1 夹持器整体结构示意图
当压力传感器接收到检测装置所传递的力之后,将其转化为电信号传递给外部的控制系统,控制系统通过改变外部的磁场大小进而控制磁流变液的刚度。 当磁流变液的刚度减小时安装保护装置整体就会变软,从而减小监测装置的支反力,进而实现安全保护的作用。软体夹持器详细结构见图2。工作时, 将检测装置(咽拭子)插入夹紧腔中并与底部安全装置相接触,使用气泵对夹持器气腔施加负压,夹持器发生扭转变形,带动咽拭子圆周扭转运动以达到检测的目的。

图2 软体夹持器详细结构
2 夹持器结构优化
本文根据反复研究以及仿真分析,确定影响夹持器扭转效果的因素分别是旋入角(A)、截面形状(B)、气压腔截面面积(C)、气压腔形状(D)、棱边圆角(E)、压强(F)。初步确定试验的每个影响因素的水平数为5,选用正交试验法进行设计试验。
2.1 试验方案设计
根据上文确定的影响因素以及水平数,选择L25(56)正交表,见表1。

表1(续)
表1中旋入角是整体螺旋结构扭转的角度,即扭转轨迹线与水平线的夹角;截面形状是扭转结构截面的形状,该因素控制整体的形状以及气腔的数量;气压腔截面面积是所有多边形气压腔截面面积的综合;气压腔形状是螺旋气腔的截面形状;棱边圆角是夹持器整体外部棱边圆角的半径;压强是在工作时施加的气体的压强。
2.2 模型建立
根据上文正交试验表所确定的影响因素的数值,确定其他参数比如整体长度、直径检测装置夹紧腔位置、安全装置腔的大小与位置等,使用Creo三维建模软件进行建模,正交试验各组模型截面见图3。
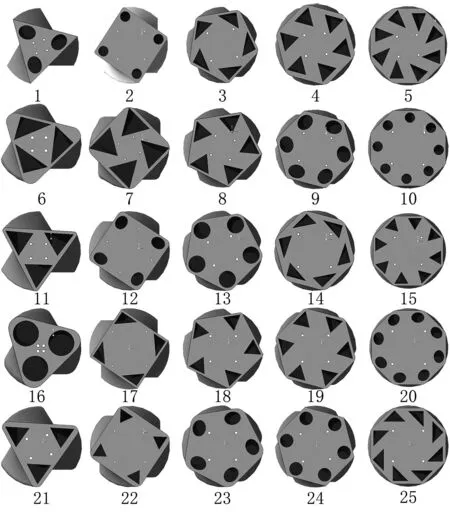
图3 正交试验各组模型截面
2.3 有限元仿真
采用Abaqus进行有限元仿真,将上文建立的模型以及检测装置的模型导入Abaqus,并对其进行装配。端部限制层选取硬质纸,夹持器剩余部分采用硅胶,检测装置选择ABS塑料,经过查阅相关文献[11]确定相应的材料参数,见表2。
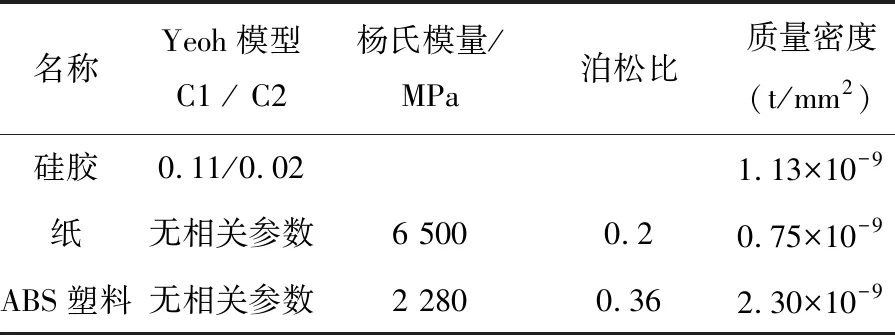
表2 材料参数
由于对气腔施加负压,因此需要对气腔内部表面建立接触,定义摩擦系数为0.3的罚函数法计算切向接触行为,法向接触行为被视为“硬”接触,允许接触后分离。 在夹持器底部设置全固定。网格划分选择四面体网格并采用杂交公式计算。位移仿真结果见图4。
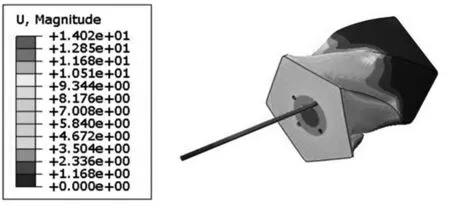
图4 位移仿真结果
2.4 仿真结果处理
通过Abaqus仿真结果可以得到咽拭子检测装置端部的位移,见图5。本文的择优标准是咽

(a) 端部位移轨迹图
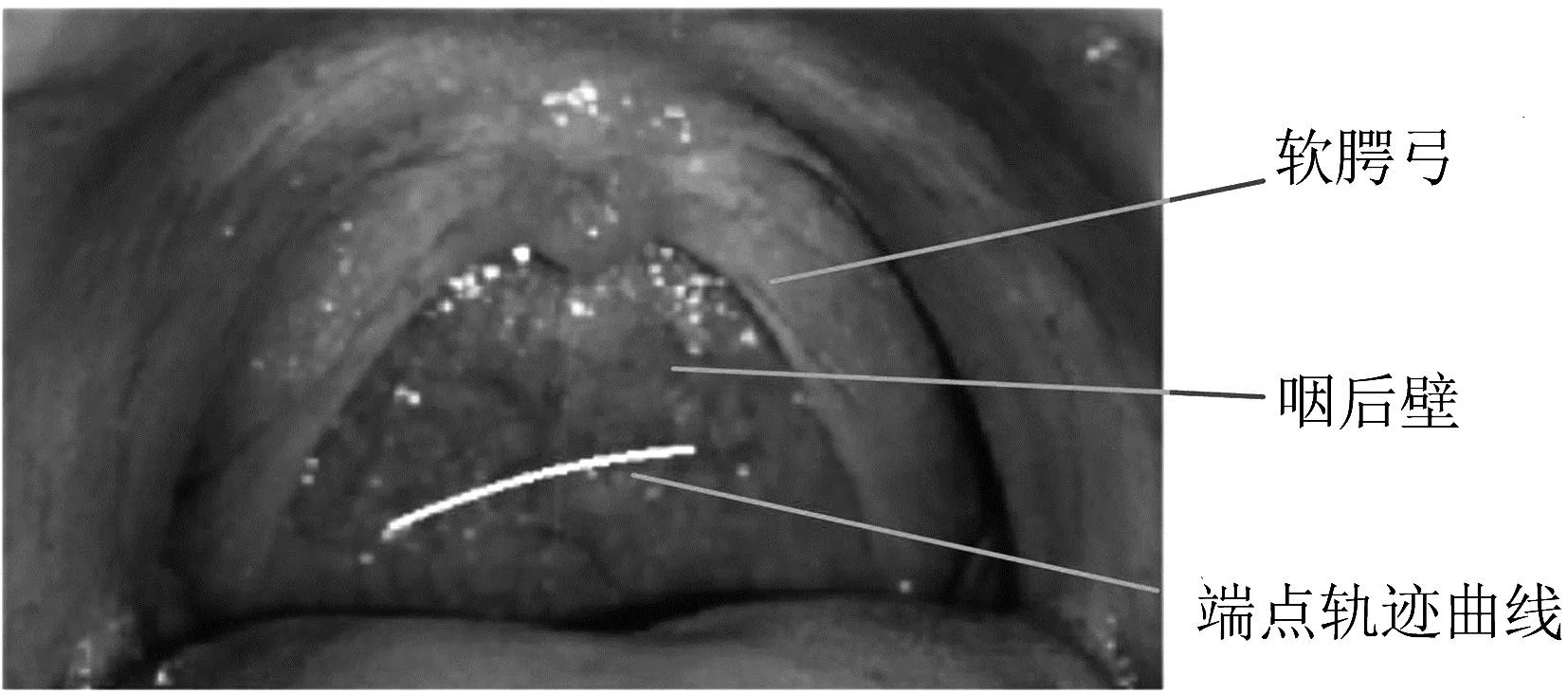
(b) 位移轨迹与口腔对比图5 结果处理图
拭子检测装置端部位移轨迹的长度符合人体咽后壁尺寸。通过查询文献可知,人体咽后壁的尺寸大约为20~30 mm[12]。
2.5 正交试验结果分析
(1)结果分析
根据以上方法对每一组仿真结果进行处理,结果发现,咽拭子位移轨迹近似为一条圆弧线,Z轴方向的位移为1~2 mm。因此,选择轨迹长度作为择优指标,各组试验的咽拭子检测装置的端部位移结果见图6。

图6 试验结果曲线
通过极差分析法来选出最优的结构,见表3。其计算公式为:
(1)
式中,i为影响因素;j为水平数;yij为因素i在水平j下的试验结果;Kij为因素i在水平j下试验结果的平均值。
Ri=max{Kij}-min{Kij}
(2)
式中:Ri为因素i不同水平试验指标均值的最大值和最小值之差(极差)。
(2)最优结构确定
通过极差分析表分析结果可以确定,影响端部位移的因素先后次序为:负压腔形状(D)>压强(F)>旋入角(A)>截面形状(B)>负压腔截面面积(C)>棱边圆角(E)。通过极差分析可以选出较优解为:A1B2C4D4E2F5,即旋入角为30°,截面形状为四边形,负压腔截面面积900 mm2,负压腔形状为等边三角形,棱边圆角为2 mm, 压强为-100 kPa。

表3 极差分析表
根据所得到的最优解的结构参数,对其进行建模并仿真,得到检测装置端部轨迹长度为13.88 mm。
3 结论
(1)本文提出了咽拭子夹持器的设计方案,以检测装置端部位移曲线的长度为择优标准,旋入角、截面形状、气压腔截面面积、气压腔形状、棱边圆角、压强大小为影响因素,每个影响因素设置5个水平数,进行正交试验,对夹持器的腔型结构进行优选。
(2)结构参数对检测装置端部位移的影响因素中负压腔形状影响最大,棱边圆角影响最小。得出较优解为旋入角30°,截面形状为四边形,负压腔形状为等边三角形,棱边圆角为2 mm,压强-100 kPa。 应用该方案的检测装置位移轨迹长度为13.88 mm。
猜你喜欢
电子设计工程(2023年21期)2023-11-10
中国科技纵横(2023年4期)2023-05-18
水道港口(2022年2期)2022-07-04
制造技术与机床(2021年5期)2021-06-18
电子技术与软件工程(2021年8期)2021-06-16
上海交通大学学报(2021年2期)2021-03-02
装备制造技术(2020年1期)2020-12-25
军事文摘(2020年24期)2020-11-29
制造技术与机床(2019年6期)2019-06-25
爆炸与冲击(2018年6期)2018-10-16