基于3GPP 协议的毫米波波束跟踪方案设计
2023-12-25 09:00白晓宇
电子技术应用 2023年12期
张 琪,白晓宇
(网络通信与安全紫金山实验室,江苏 南京 211111)
0 引言
随着无线通信技术的不断发展,无线通信网络在传输带宽、数据吞吐量等方面的需求快速增加。与传统6 GHz 以下频段相比,毫米波频段拥有大量的空闲带宽资源,可以有效提升系统的数据传输速率,但是毫米波频段的自由空间路径损耗大,大气吸收和降雨造成的衰减严重,必须依赖于大规模天线阵列的波束赋形技术才能有效抵抗信号衰减[1]。为了达到较高的发射增益,毫米波大规模天线阵列的波束宽度通常较窄,基站与用户之间必须通过波束跟踪来保证波束相互对齐,从而建立稳定的通信链路。
近年来,各国专家学者针对波束跟踪问题提出了许多算法,例如:文献[2]-[3]提出了基于Kalman 滤波的波束跟踪算法;文献[4]通过Gauss 过程回归来分析信道的时变特性,进而给出波束的变化规律;文献[5]给出了基于强化学习的波束跟踪方法;文献[6]则进一步研究了协作传输中基于强化学习的波束跟踪问题。但是现有文献主要集中于研究波束跟踪算法理论问题,对于在实际应用中如何将3GPP(3rd Generation Partnership Project)协议与波束跟踪算法有机结合起来,目前的研究成果较少。文献[7]-[8]对3GPP 协议中波束管理有关的流程进行了详细介绍和展望;在此基础之上,文献[9]讨论了基于信道状态信息参考信号 (Channel State Information Reference Signal,CSI-RS) 和探测参考信号 (Sounding Reference Signal,SRS) 的波束跟踪方案;文献[10]进一步研究了波束失败的检测与恢复方法。
本文在上述研究的基础之上,对3GPP 协议规范下毫米波通信系统的波束跟踪问题进行了详细研究。本文首先介绍了3GPP 协议中的上行波束管理流程P1、P2、P3 和下行波束管理流程U1、U2、U3,并基于上述流程给出了4 种不同的波束跟踪算法实现方案,然后对各方案的资源占用率和波束失败概率进行了分析和对比,给出如下结论:
(1)从上下行资源占用率联合最优的角度来看,P2+P3、U2+P3 以及U2+U3 方案为Pareto 最优方案,考虑到一般通信系统中下行时隙资源占比普遍高于上行,因此P2+P3 方案的平均资源占用率更低;
(2)从波束失败概率的角度来看,U2+P3 方案由于无需反馈测量信息,因此流程最简单,在高动态通信环境中,引发波束失败的概率最低;
(3)在不同的通信系统中,应当根据系统的实际需求选用不同的波束跟踪方案。在终端移动速度较低且下行时隙资源丰富的通信系统中,可选用P2+P3 方案,在高动态且对数据传输延迟要求较严格的通信环境中,可选用U2+P3 方案。
1 波束跟踪的基本过程
假设一毫米波基站服务于M个用户,其中第m个用户的传输带宽为BmMHz,全部用户占用的总带宽为BtotalMHz,子载波间隔ΔSCS=120 kHz,则上述BtotalMHz的带宽在频域上可容纳个子载波,也即个资源单元 (Resource Element,RE)。基站与用户通信的一个无线帧长度为10 ms,每个无线帧包含10个子帧,每个子帧长度为1 ms,系统采用正常循环前缀(Cyclic Prefix,CP),每个子帧包含个=8 个 时隙,每个时隙包含14 个正交频分复用 (Orthogonal Frequency Division Multiplexing,OFDM) 符号。
为了能够在用户移动过程中始终保持基站与用户的波束对齐,3GPP 协议分别规定了用于下行波束管理的P1、P2 和P3 过程和用于上行波束管理的U1、U2 和U3 过程[11],如图1(a)和图1(b)所示。

图1 3GPP 协议规定的波束管理过程
P1 和U1 过程分别通过下行和上行参考信号进行粗扫描,确定基站或用户的宽波束,一般而言,用户在初始接入阶段通过同步信号块 (Synchronization Signal Block,SSB) 与物理随机接入信道 (Physical Random Access Channel) 之间的交互可实现P1 过程。
P2 过程通过下行参考信号进行基站波束细化,基站采用不同的窄波束发射若干下行参考信号,用户采用相同的接收波束对参考信号进行测量后,将测量结果反馈给基站,基站据此选择最优窄波束,完成P2 过程;与之相对应的U2 过程则通过上行参考信号进行基站波束细化,用户通过同样的波束发射若干上行参考信号,基站采用不同的窄接收波束对参考信号测量进行后,选择最优窄波束,完成U2 过程。
P3 过程通过下行参考信号进行用户波束细化,基站采用同一波束发射若干下行参考信号,用户采用不同的窄接收波束对参考信号进行测量并选择最优窄波束,完成P3 过程;与之相对应的U3 过程则通过上行参考信号进行用户波束细化,用户通过不同的窄波束发射若干上行参考信号,基站采用相同的接收波束对参考信号进行接收和测量后,将测量结果反馈给用户,用户据此选择最优窄波束,完成U3 过程。
由于毫米波频段的通信采用时分双工模式[12],一般而言,可以认为上下行信道具有互易性[13]。据此可以合理做如下假设:
上下行波束一致性假设[14]:基站可以通过下行信道的测量结果决定上行接收波束,也可以通过上行信道的测量结果决定下行发射波束;类似地,用户可以通过下行信道的测量结果决定上行发射波束,也可以通过上行信道的测量结果决定下行接收波束。
基于上述假设,通过P2 与U2 过程得到的波束是等价的,通过P3 与U3 过程得到的波束是也是等价的,因此可以给出如图2 所示的波束跟踪基本流程。

图2 波束跟踪的基本流程
在图2 中,基站与用户进行一段时间的数据传输后,由于两者的相对位置可能已经发生变化,因此需要对波束进行更新。首先,基站侧根据文献[2]-[6]给出的算法确定需进行波束扫描的范围,然后采用P2 或U2 过程对上述范围内的波束进行扫描测量,并根据测量结果更新波束;基站侧确定新的波束后,用户侧采用同样的过程通过P3 或U3 进行波束扫描和更新。通过上述分析,波束跟踪算法可以有4 种不同的实现方式,分别为P2+P3、P2+U3、U2+P3 以及U2+U3。下文将重点分析上述4 种不同类型的跟踪方案在资源占用率和波束失败概率方面的区别。
2 波束跟踪过程的资源占用分析
本节将对P2、P3、U2 和U3 过程占用的资源进行分析,并在此基础上对不同实现方式进行比较。
2.1 P2 过程
P2 过程是基于下行参考信号CSI-RS 进行基站发射波束扫描的过程,为了降低信令开销,本文只考虑周期性CSI-RS 的情况,与周期性CSI-RS 相对应,用户此时仅可通过物理上行控制信道(Physical Uplink Control Channel,PUCCH) 上报CSI 报告[12]。
首先,基站在NK个OFDM 符号上发送N个非零功率CSI-RS (Non-Zero Power CSI-RS,NZP-CSI-RS) 信号,分别对应于N个需要扫描的波束,每个NZP-CSI-RS信号占用K个OFDM 符号时长。由于基站在进行波束扫描时有些波束并未对准用户,因此为了保证数据传输的可靠性,在进行波束扫描的时间范围内,一般而言不应当发送有效数据,据此,可以认为在基站进行波束扫描的时间范围内,全部带宽内的资源均为波束扫描所占用,也即占用个RE。
用户收到上述N个NZP-CSI-RS 信号后,测量每个NZP-CSI-RS 信号的层1 参考信号接收功率 (Layer 1 Reference Signal Receiver Power,L1-RSRP),然后,根据3GPP 协议的规定,用户将选择其中功率值最大的4 个NZP-CSI-RS 信号,组成CSI 报告进行上报,CSI 报告中包含下列项:4 个NZP-CSI-RS 信号的编号,共占用;具有最大功率NZP-CSI-RS 信号的绝对功率值,占用7 bit;其他3 个NZP-CSI-RS 信号相对于最大功率的功率差值,共占用12 bit[15]。因此,用户上报的CSI报告共占用+19 bit,假设调制阶数为Q,那么CSI 报告共占用个RE。
其中,M表示用户数量,ηdown和ηup分别表示用户下行传输时长和上行传输时长占总时长的比例。
2.2 U2 过程
U2 过程是基于上行参考信号SRS 进行基站接收波束扫描的过程,首先,用户在相同波束上发送N个SRS 信号,同时基站在不同的接收波束上接收SRS 信号并测量信号功率,然后直接根据功率测量结果选择波束。为了降低信令开销,本文只考虑周期性SRS 的情况。
显然,U2 过程不占用下行信道资源,仅需计算N个SRS 信号所占用的上行信道资源。与P2 过程中的NZPCSI-RS 信号类似,N个SRS 信号需占用NK个OFDM 符号时长,每个SRS 信号占用K个OFDM 符号时长,也即占用个RE,那么U2 过程对上行信道资源的占用率可以表示为:
2.3 P3 过程
P3 过程是通过下行参考信号NZP-CSI-RS 进行用户侧波束选择的过程,其具体过程与U2 完全对称,此处不再赘述,直接给出结论。
P3 过程不占用上行信道资源,对下行信道资源的占用率为:
2.4 U3 过程
U3 过程是基于上行参考信号SRS 进行基站侧波束扫描的过程,其具体过程与P2 类似,可分为2 个子过程:首先,用户在N个波束上发送N个SRS 信号,同时基站在相同的接收波束上接收SRS 信号并测量信号功率;然后,基站通过物理下行控制信道(Physical Downlink Control Channel,PDCCH) 给用户发送SRS 资源指示(SRS Resource Indicator,SRI),通知用户应选择的波束。
2.5 不同波束跟踪过程的资源占用率对比
基于上述各小结的分析,可以给出不同波束跟踪实现方案的资源占用情况,为了表示方便,令:
各波束跟踪方案的资源占用率如表1 所示。

表1 不同波束跟踪方案的资源占用率
一般而言,在通信系统中,波束扫描数量N和调制阶数Q具有相同或者相近的数量级,而通信带宽Btotal一定远大于子载波间隔ΔSCS,因此有:
也即η0≫Δ1>Δ2。另外,下行时隙占比一般会大于上行时隙占比[12],也即ηdown>ηup。
由此可知,P2+P3 方案主要占用下行时隙资源,U2+U3 方案主要占用上行时隙资源,且P2+P3 方案的下行资源占用率低于U2+U3 方案的上行资源占用率;P2+U3 方案和U2+P3 方案需同时占用上下行资源,且P2+U3 方案对上下行资源的占用率均高于U2+P3方案。
图3 直观地给出了上述4 种方案在资源占用率上的对比,从中可见,当通信系统的各项参数以及需扫描的波束数量均固定时,从上行和下行资源占用率联合最优的角度而言,P2+P3、U2+P3 以及U2+U3 方案均为Pareto最优,而P2+U3 方案还存在进一步优化的空间。另外,从上下行平均资源占用率最低的角度来看,U2+U3 方案的平均资源占用率较高,P2+P3 和U2+P3 方案的平均资源占用率相对较低。

图3 不同波束跟踪方案上下行资源占用率的关系
3 波束跟踪过程的失败概率分析
本节介绍3GPP 协议中对波束失败探测的相关规定,并对P2、P3、U2 和U3 过程可能引发的波束失败概率进行详细的分析。
根据3GPP 协议规定,用户对特定参考信号 (CSI-RS或SSB) 的块差错率 (Block Error Rate,BLER) 进行监测,当该BLER 高于特定阈值时,产生1 次波束失败指示 (Beam Failure Instance,BFI)。在规定时间beamFailureDetectionTimer 内,产生 1 次 BFI,则计数器BFI_COUNTER+1;在规定时间beamFailureDetection-Timer 内,没有产生BFI,则计数器BFI_COUNTER 清零。当BFI_COUNTER 达到预设值beamFailureInstanceMax-Count 时,确认波束失败[16]。
显然,波束失败的判定需要持续一段时间的高BLER 方可成立,单一时刻的BLER 升高并不会被立即判定为波束失败。基于上述前提,下文将首先比较P2过程与U2 过程在BLER 升高时的差异。
如图4 所示,假设t0时刻开始进行数据传输,在传输过程中,由于用户的移动,导致原相互对齐波束不再准确对齐,通信质量逐渐降低,但未低于预设阈值,通信仍能正常进行。在t1时刻,由于波束不对齐引起的BLER升高超过阈值,通信无法正常进行,但此时由于BLER超过阈值的时间较短,终端并未确认波束失败。接下来在t2时刻,启动P2 过程,将首先进行NZP-CSI-RS 发射波束扫描,用户对NZP-CSI-RS 进行测量,在t3时刻得到测量值,并生成CSI 报告。此时,如果用户能够将CSI 报告通过PUCCH 上报给基站,基站即可切换至通信质量较好的波束,恢复通信。但是基站在收到PUCCH 上的CSI报告之前,无法知晓哪个波束具有较好的通信质量,因此,基站只能在原波束上等待接收CSI 报告。但原波束从t1时刻起,已无法正常通信,因此,基站无法正常接收CSI 报告,也无法切换波束,直到t4时刻,计数器BFI_COUNTER 达到预设值beamFailureInstanceMax-Count,用户确认波束失败,数据传输完全中断,转入波束恢复流程。
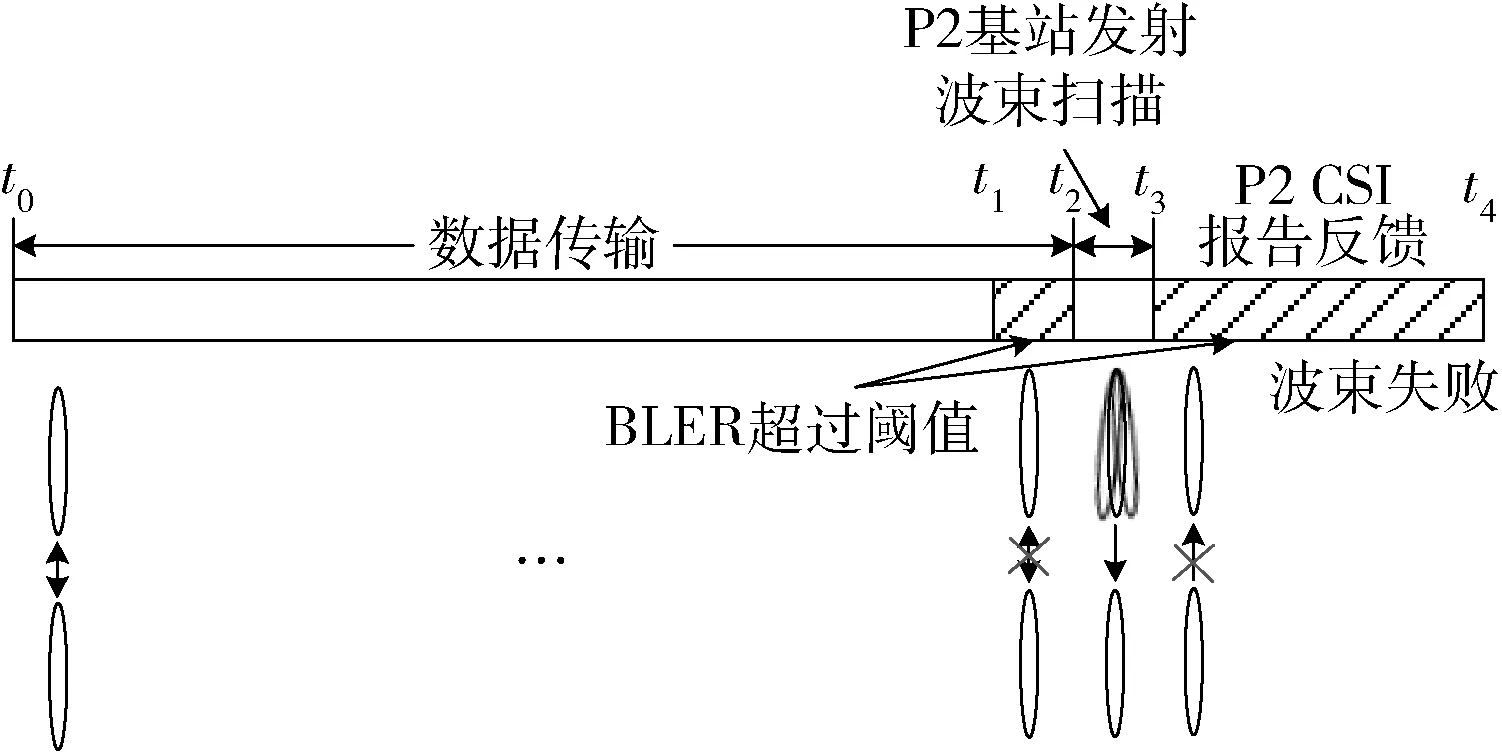
图4 当BLER 超过阈值时P2 过程示意图
对于上述情况,如果采用U2 过程,则如图5 所示。在t1时刻,波束不对齐引起的BLER 升高超过阈值,但还并未确认波束失败。接下来在t2时刻,启动U2 过程,用户在相同的波束上发射若干SRS 信号,基站进行接收波束扫描并在t3时刻完成SRS 信号功率测量。此时,基站已知晓不同波束的通信质量,可直接选择功率较高的波束进行后续通信,BLER 从t3时刻起降低至阈值以下,计数器BFI_COUNTER 清零,不会引发波束失败。
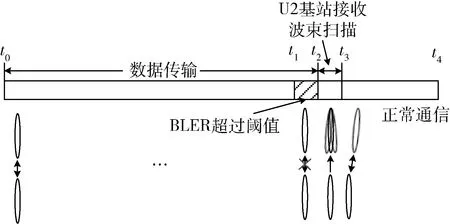
图5 当BLER 超过阈值时U2 过程示意图
通过以上分析发现,由于P2 过程需要反馈CSI 报告,因此其引发波束失败的概率大于U2 过程。类似地,U3 过程需要反馈SRI,其引发波束失败的概率同样大于P3 过程。因此,从波束失败概率的角度来看,U2+P3 方案无需反馈信息,具有最优性能。
综合上述分析可知,选用何种方案进行跟踪应当根据系统的指标要求决定。例如,对于终端移动速度较慢且下行时隙资源比较丰富的场景,发生波束失败的概率较低,此时可采用P2+P3 方案,从而有效降低对上行资源的占用;而对于高动态、低延时的通信环境,为了降低通信中断概率,保证通信数据的及时送达,可采用U2+P3 方案。
4 仿真实验
本节通过仿真实验进一步详细分析各波束跟踪方案的资源占用情况。不失一般性,假设数据传输带宽Btotal=95.04 MHz (信道带宽100 MHz,两侧保护带占用4.96 MHz),用户数量M=16,PUCCH 和PDCCH 采用QPSK 调制,调制阶数Q=2。
图6 表示跟踪周期对波束跟踪算法资源占用率的影响,其中上行时隙与下行时隙的占比分别设置为30%和70%,波束扫描数量N=8。

图6 跟踪周期对波束跟踪方案资源占用率的影响
从图6 中可见,U2+U3 方案的上行资源资源占用率非常高,当跟踪周期小于100 ms 时,上行资源占用率高于20%;当跟踪周期小于20 ms 时,100%的上行资源依然无法满足跟踪需求。P2+U3 方案与U2+P3 方案的资源占用率几乎相同,说明CSI 报告或者SRI 反馈占用RE 资源的比例极低,从资源占用率的角度而言几乎可以忽略不计,但是考虑到P2+U3 方案需要两次反馈过程,而U2+P3 方案无需反馈,从波束失败概率的角度而言,U2+P3 方案优于P2+U3 方案。P2+P3 方案的下行资源占用率与P2+U3 方案、U2+P3 方案的上下行资源占用率相近,而P2+P3 方案的上行资源占用率则远低于P2+U3 方案与U2+P3 方案,从平均资源占用的角度而言,P2+P3 方案最优,因为该方案主要占用下行资源,而在一般通信系统中,下行资源比上行资源更加丰富。
图7 表示波束扫描数量对波束跟踪算法资源占用率的影响,其中上行时隙与下行时隙的占比分别设置为30%和70%,跟踪周期T=20 ms。从仿真实验结果来看,U2+U3 方案的上行资源占用非常高,当扫描波束数量多于10 个时,全部的上行资源依然无法满足波束跟踪的需求,在扫描波束数量较少的区间范围内,U2+U3 方案的上行资源占用率也几乎保持在20%以上。对于P2+P3、P2+U3、U2+P3 方案,其结论基本与图5 一致,此处不再赘述。

图7 波束扫描数量对波束跟踪方案资源占用率的影响
图8 表示上下行时隙分配比例对波束跟踪算法资源占用率的影响,其中跟踪周期为20 ms,波束扫描数量N=8。从中可见CSI-RS 和SRS 占用的RE 资源随着上下行时隙分配比例的变化基本上呈对称分布,而反馈信息CSI 报告和SRI 指示占用的RE 资源并不对称,其原因在于CSI 报告包含的信息较SRI 多,需要占用的RE 资源多于SRI。总体来说,上下行时隙分配比例对波束跟踪方案具有决定性的影响,在一般情况下,较低的上行时隙占比决定了U2+U3 方案消耗上行资源太多,对上行数据传输造成的影响较大。
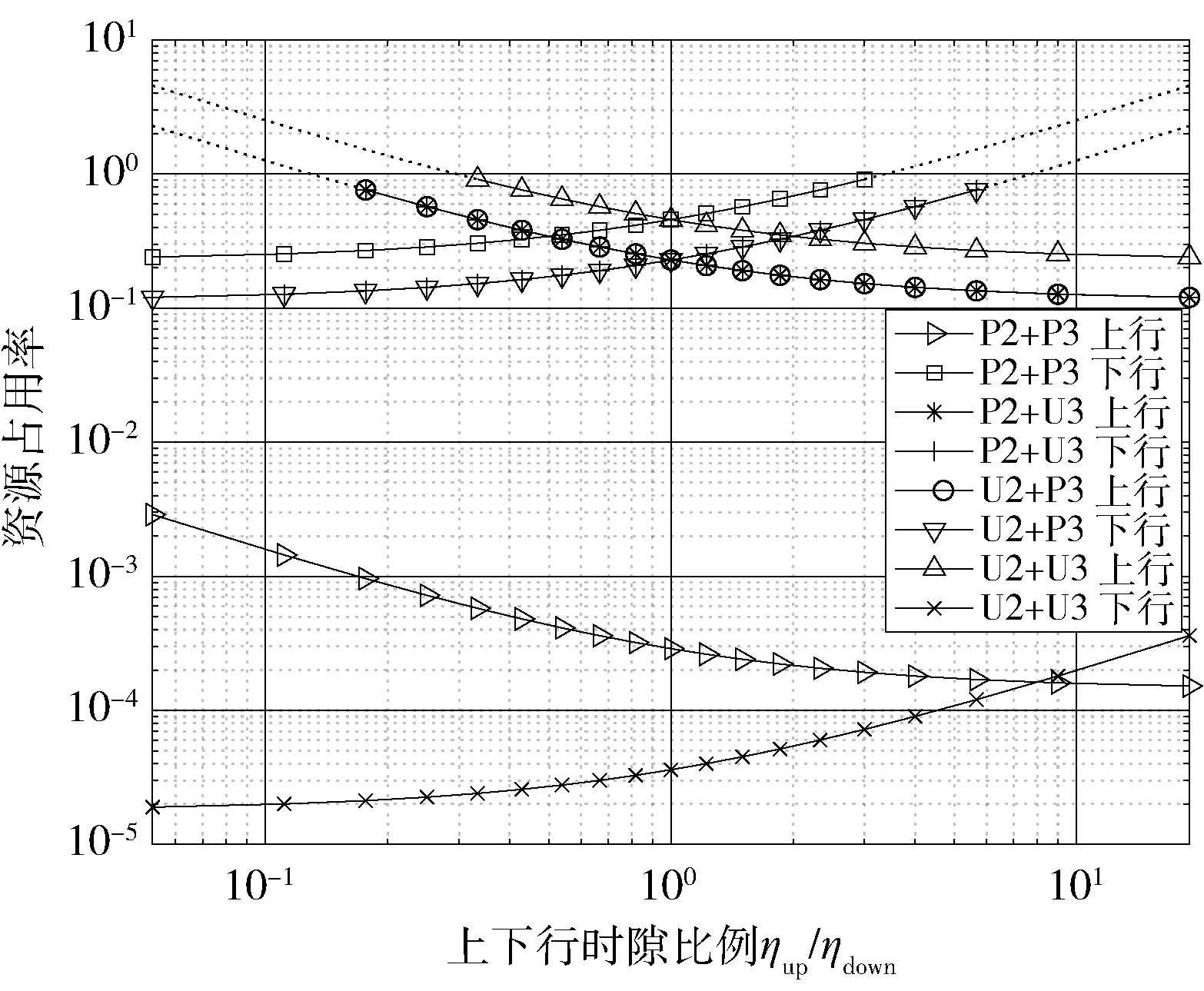
图8 上下行时隙分配比例对波束跟踪方案资源占用率的影响
5 结论
波束跟踪是毫米波通信系统的关键技术之一。根据3GPP 协议规范,波束跟踪可通过P2+P3、P2+U3、U2+P3 和U2+U3 4 种方式实现。本文对上述4 种方式的资源占用率和波束失败概率进行了详细分析。从分析结果来看,一般而言,通信系统的上行时隙占比往往较低,因此从资源占用率方面来看,P2+P3 方案具有较好的性能;然而U2+P3 方案由于其无需测量反馈过程,所以具有更低的波束失败概率,在实际应用中,可根据通信系统的具体指标要求,选用合理的波束跟踪方案。
猜你喜欢
魅力中国(2019年6期)2019-07-21
通信技术(2019年3期)2019-05-31
铁道通信信号(2018年9期)2018-11-10
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
舰船电子对抗(2016年3期)2016-12-13
网络安全和信息化(2016年3期)2016-11-26
广西大学学报(自然科学版)(2016年5期)2016-11-12
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
四川师范大学学报(自然科学版)(2015年4期)2015-02-28