异形易碎小型固性物料的转运料装置构型设计与特性试验研究
2023-12-20 02:57成楷钟飞杨小俊周宏娣
包装工程 2023年23期
成楷,钟飞,杨小俊,周宏娣
异形易碎小型固性物料的转运料装置构型设计与特性试验研究
成楷,钟飞*,杨小俊,周宏娣
(湖北工业大学 机械工程学院,武汉 430068)
针对一种易碎异形小型固性物料的添加需求,开发一种物料转运料装置。采用瞬态动力学仿真分析方法,运用ANSYS WorkBench软件对小型固性物料受到冲击碰撞进行瞬态动力学仿真分析,研究其可承受的最大转速。通过搭建平台进行实物转运料试验,验证该装置的可靠性和稳定性,得到为达到生产效益最大化的最优转速。仿真结果表明该物料最大承受转速为1 200 r/min,否则物料失效。根据转运物料试验表明该装置结构设计合理,可满足在高速连续状态下转运料的工作要求,且在600 r/min时物料完好数最多,生产效率最高。
转运料装置;物料添加;Workbench;瞬态动力学
转运料装置作为自动化生产线上重要的构成部分,其可靠性和稳定性决定了生产效率[1],而推送料机构[2]是转运料装置的核心构件,根据不同规格和材质的物料,业界专家学者们结合相关机械原理设计出多种推送料装置。针对规则外表面硬质物料如红枣、糖果等,曹劲草等[3]利用拨枣转盘的圆周运动和曲柄滑块机构的往复直线运动设计出一种红枣去核机的上料机构。田野等[4]设计了一种以曲柄-摇杆为原理的推糖机构,并通过Adams软件仿真优化推搪速度。针对不规则外形软质物料的牙刷头,姚林晓等[5]设计了一种自动上料装置,采用ANSYS Workbench显示动力学模块对牙刷头的上料过程进行仿真分析、优化上料推头机构,解决上料过程中牙刷头向上跳动及与上料推头接触不紧密的问题。针对饼干摞等包装好的物料,向飞等[6]设计出一种基于凸轮-连杆机构实现物料推送的自动装盒机推料机构。针对小型黏性混合物料的输送,冯砚博等[7]设计了一种混拌输送机械装置,利用滚动螺旋中螺杆和螺母的配合以及直线导轨来控制螺母的运动方向,实现对管装黏性物料的推送。针对植物特性影响野生蓝莓收获机采摘效率问题,Jameel等[8]试验得出适宜的地面速度和割台转速组合可以最大限度地减少采收过程中的浆果损失。
针对一种外形不规则且易破易变形的水杯状物料[9],若采用传统的鼓轮负压吸附运料[10],因其不规则外形将导致吸附力不足,使其难以与鼓轮紧密贴合,无法确保其在鼓轮槽内稳定吸附。针对上述问题,本课题设计出一种转运料装置以满足水杯状小型异形物料的转运料需求。另外,通过瞬态动力学仿真方法进行小型固性物料添加过程的碰撞分析,并结合试验分析对该转运料装置完成参数优化。
1 转运料装置及工作原理
为实现异形物料底面-底面的对向排列添加,且在转运料过程中保证其完好率,设计一种转运料装置完成送料、推料动作。该转运料装置由送料单元及推料单元组成,完成异形物料的转运工序。送料单元由导轨、推杆滑块、滚动轴承以及盘形凸轮组成,如图1a所示。送料单元依托“盘形凸轮-导轨推杆机构”原理设计,通过合理的盘形凸轮槽曲线控制推杆滑块的移动,将储料仓中的异形物料推送至送料盘空腔,完成送料动作。推料单元由滑块、导轨以及盘形凸轮组成,如图1b所示。推料单元依托“盘形凸轮-导轨滑块机构”原理设计,通过送料盘的导轨以及推料盘的盘形凸轮控制滑块的上下移动,将空腔内的异形物料在下料口位置推出,完成推料动作。
1.1 送料单元
送料单元由输料管、伺服电机、送料机构及基座组成,如图2a所示。其中送料机构由推杆、滑块及直线滑轨组成,如图2b所示。送料盘在伺服电机的驱动下转动,当其转动至储料仓A、B时,在送料盘盘形凸轮槽作用下送料机构做往复运动,实现物料的间歇同步送料,将储料仓中的物料推入送料盘的空腔中。
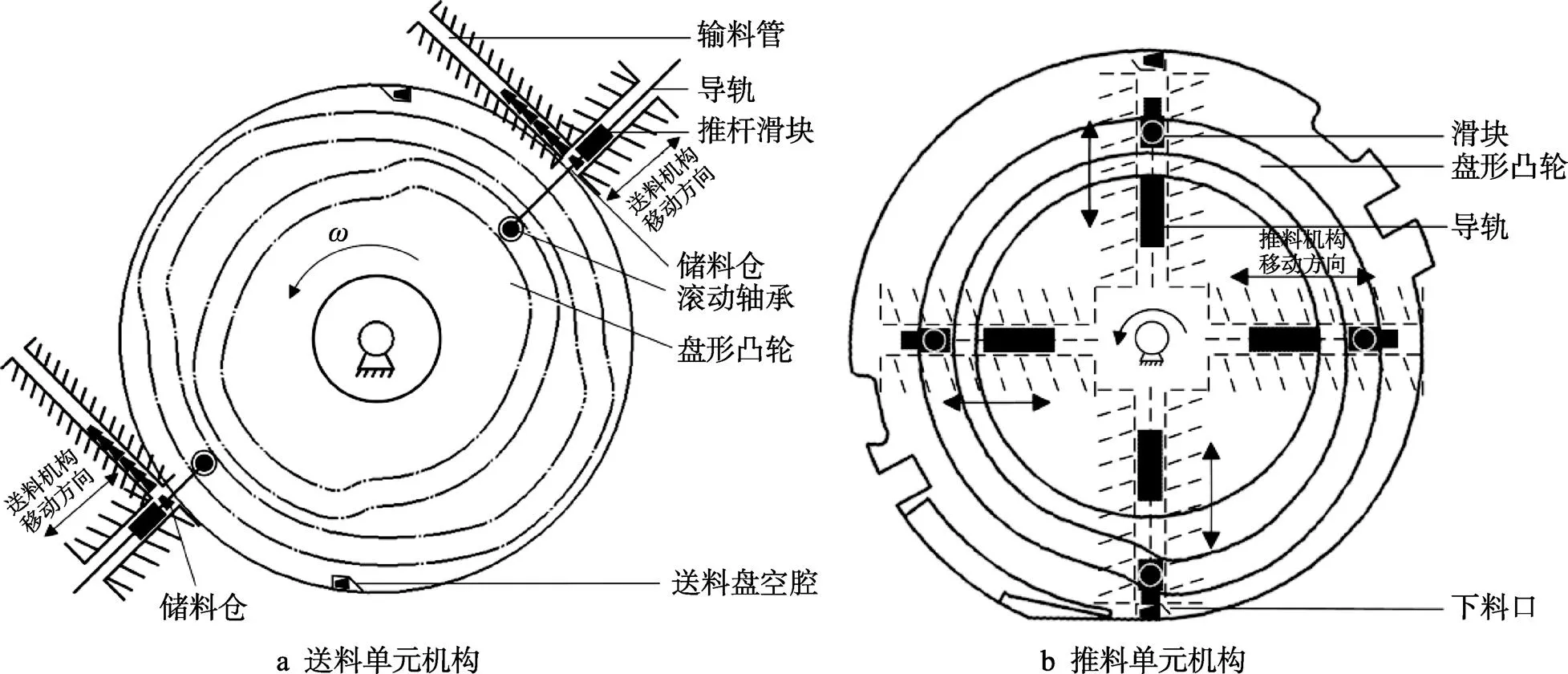
图1 转运料装置结构
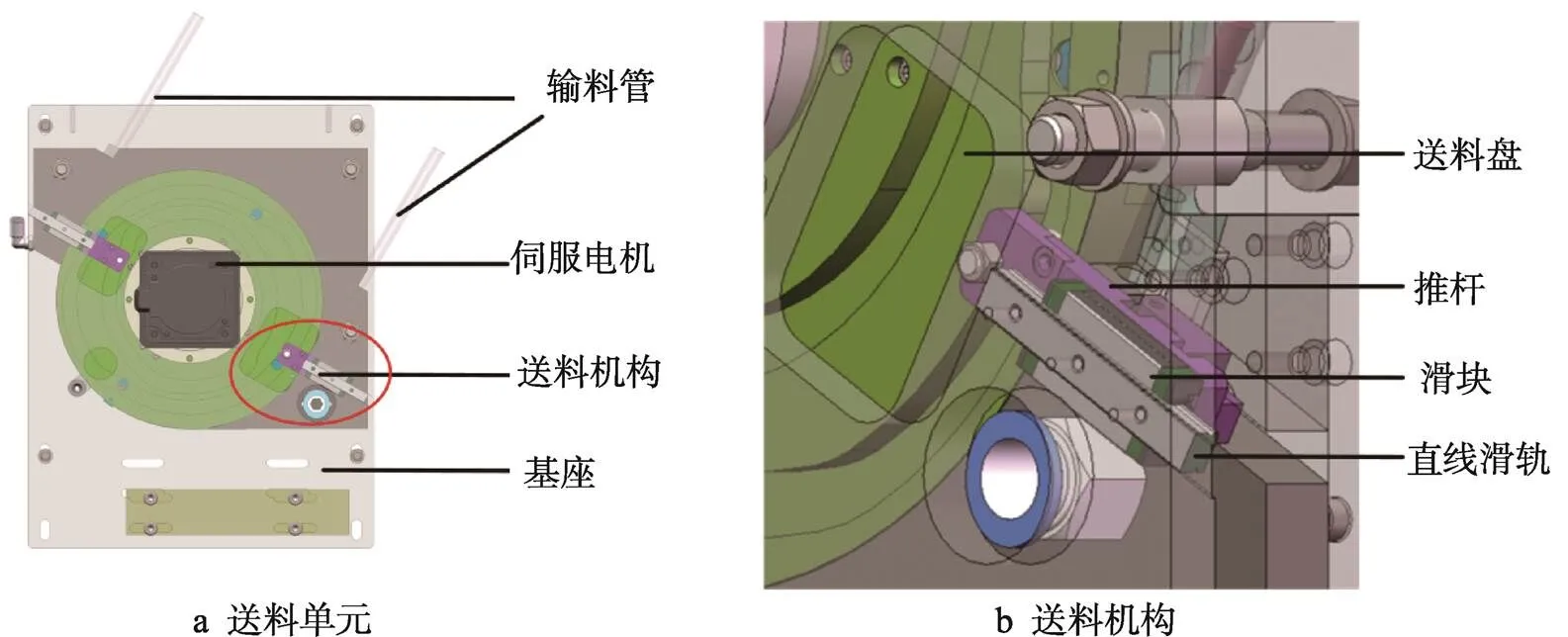
图2 送料单元及局部放大图
1.2 推料单元
推料单元由储料仓、推料盘、推料机构、下料口及直线凸轮槽组成,如图3a所示。其中推料机构由滑块、直线导轨推杆及推块组成,如图3b所示。当送料盘转过一定角度,即将到达装置最下端出料口C时,推料盘内的盘形凸轮槽驱使推料机构将送料盘空腔内的小型固性物料垂直推入正下方的取料爪中。且由于推料盘的盘形凸轮槽曲线与安装在基座的直线凸轮槽同步,通过设计出一个行程差,使得推料时始终保持一个物料的宽度,实现间歇取料。
2 有限元模型及仿真
2.1 有限元模型
为研究转运料装置从储料仓取料过程中,对物料瞬间碰撞冲击造成的影响。在不影响结构强度和计算精度的前提下,提高计算效率和改善模型的单元质量,对转运盘送料机构进行合理简化并建立碰撞模型[11],去除盘形凸轮槽、推杆、滑轨等次要构件,仅保留送料盘、推块等主要零件,简化模型如图4所示。
在建模、加载及求解过程中不考虑材料塑性影响,定义各部分的材料属性如表1所示。
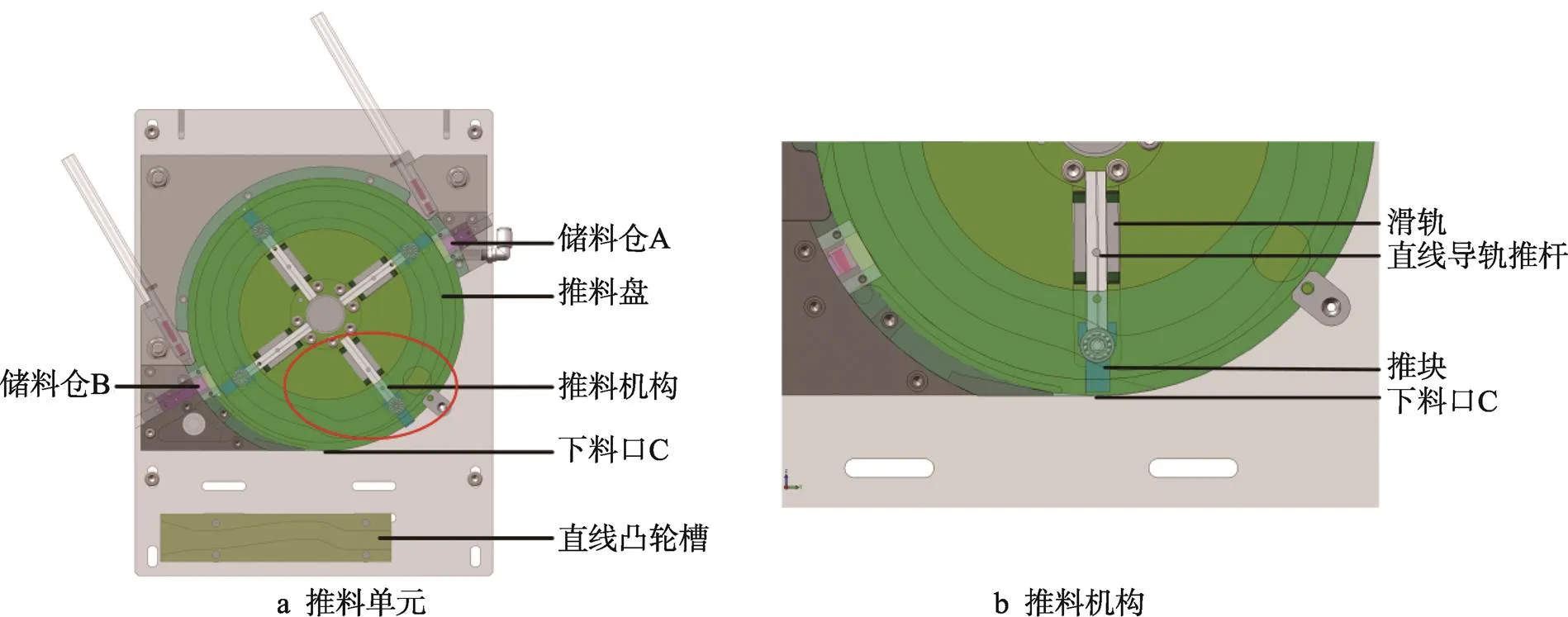
图3 推料单元及局部放大图
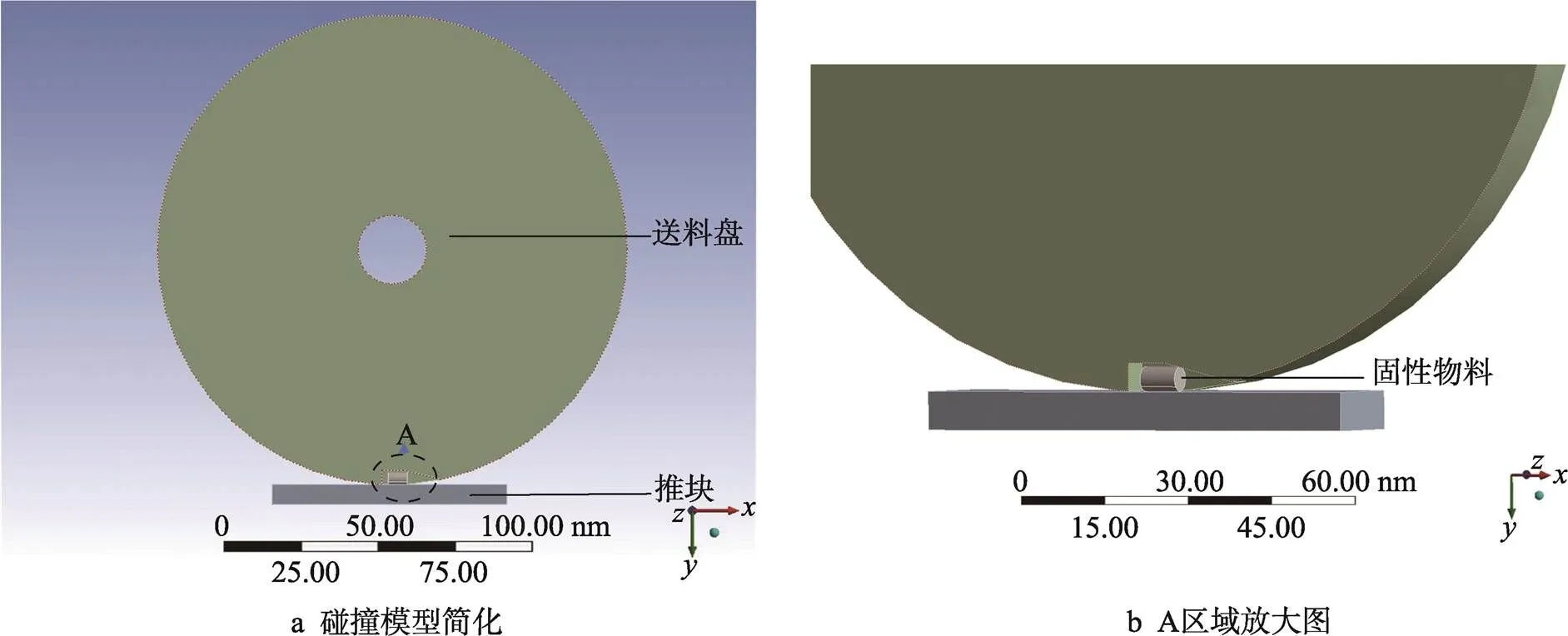
图4 有限元模型简化
表1 所选材料属性

Tab.1 Properties of selected material
2.2 网格划分
对复杂机构采取局部细化网格的方法对模型指定区域进行网格加密处理,使仿真计算结果更准确。各区域网格划分方法如下:物料采用六面体主导网格划分;送料盘空腔左侧面(即与物料发生碰撞的区域)采用Face Sizing方法,网格大小设置为0.5 mm;物料采用Body Sizing方法,设置网格大小为0.5 mm;针对其余部分网格,采用系统默认生成网格的方法,网格大小为3 mm,整体模型生成网格后的节点数为80 677,单元数为32 611,如图5所示。
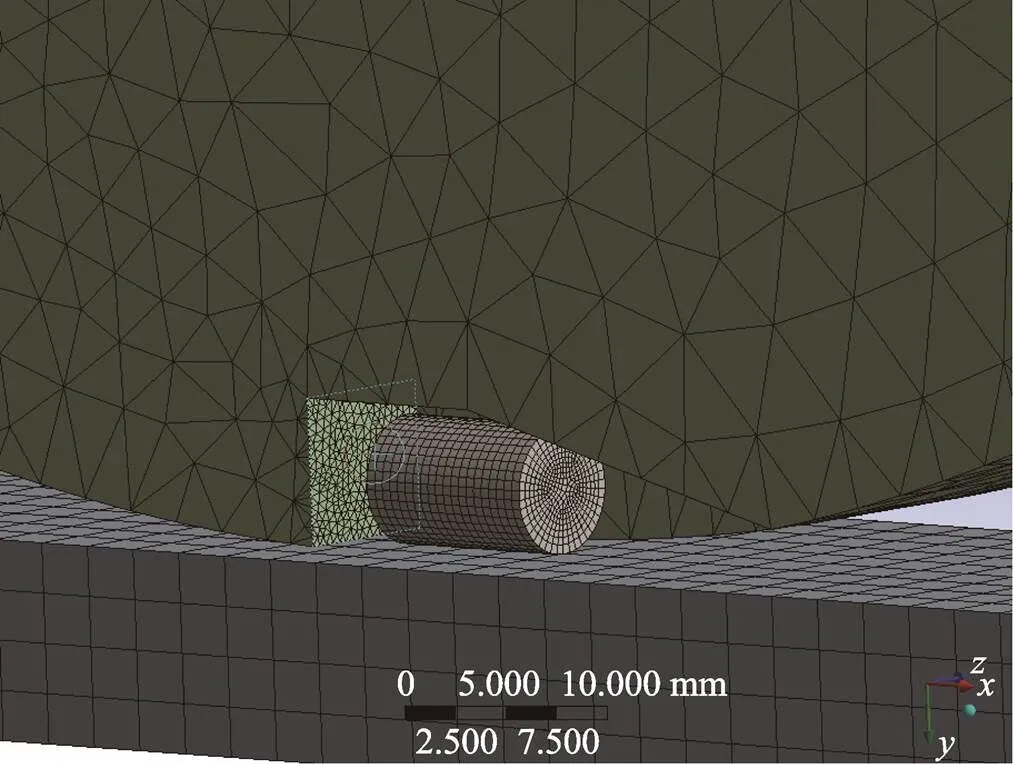
图5 网格划分结果
2.3 边界条件设定
在建立有限元仿真模型之后,为了准确模拟物料受到碰撞冲击的瞬态过程,完成动力学仿真分析,添加合理的边界条件是建立完整动力学有限元模型的必要条件[12]。由于ANSYS WorkBench在导入模型后会默认生成基于系统接触检测出来的连接关系,但往往大多数是不合理的,因此删除默认连接关系并单独设置。在Transient Structural的Connections中插入Contacts连接关系和转动副,建立如下连接关系,如表2所示。此外,各接触面的摩擦因数设置为0.15。
为避免单元节点相互穿透,算法选用增强拉格朗日(Augmented Lagrange)[13],探测方法选择高斯点探测(Gauss Point)[14]。对于碰撞冲击类型,为消除接触模型的小间距,选择自动调整接触(Adjust to Touch)。另外,将旋转角速度施加于送料盘中心,使送料盘绕图2a中轴负方向转动。
表2 连接关系设定
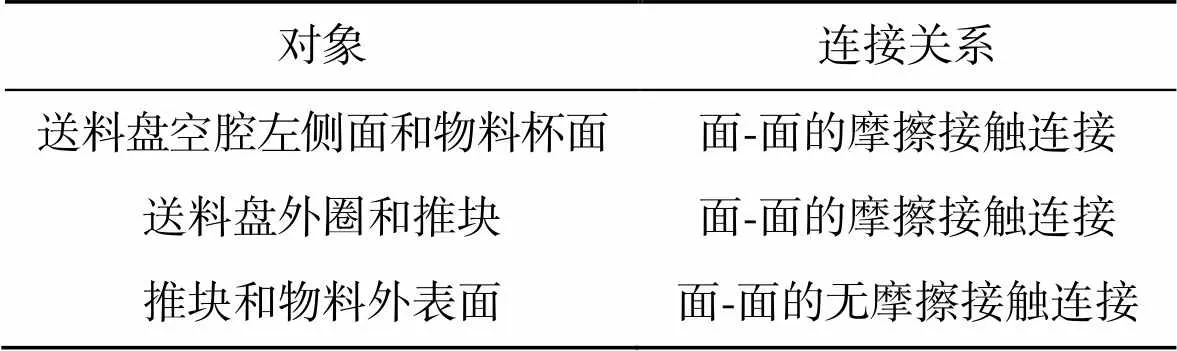
Tab.2 Connection setting
2.4 仿真分析设定
假设送料盘空腔左侧表面与物料之间距离为3 mm,根据送料盘不同转速,计算送料盘碰撞物料所需时间,如表3所示。为保证求解收敛以及计算结果准确率,设置时间步及不同转速下送料盘的碰撞时间步。
3 仿真结果分析
通过对小型固性物料瞬态碰撞进行仿真计算,得出物料受到不同转速下送料盘碰撞冲击后的等效应变、应力分布以及对比曲线。小型固性物料的最大等效应变如图6、图7所示。由图5可知,形变主要集中在物料的侧面,且随着送料盘转速的提高,物料最大等效应变增大。由图6所示,在0~0.000 19 s时,送料盘还未碰撞到物料,物料等效应变为0;当送料盘转速为600 r/min时,在0.000 5 s时物料最大等效应变为0.033 012;当送料盘转速为900 r/min时,在0.000 318 02 s时物料最大等效应变为0.070 773;当送料盘转速为1 200 r/min时,在0.000 250 55 s时最大等效应变为0.149 84。
3组不同转速下的固性物料等效应力云图如图8所示,最大等效应力均出现在物料侧面。不同转速下固性物料时间-最大等效应力如图9所示,在0~0.000 19 s时,送料盘还未碰撞到物料,物料等效应力为0;当送料盘转速为600 r/min时,在0.000 355 1 s时物料最大等效应力为9.165 3 MPa;当送料盘转速为900 r/min时,在0.000 3180 2 s时物料最大等效应力为19.486 MPa;当送料盘转速为1 200 r/min时,在0.000 250 55 s时最大等效应力为41.504 MPa。此外,送料盘在1 200 r/min时物料的时间-最大等效应力图出现二次突变,这是由于送料盘线速度过高,超过物料受到冲击后产生的速度,两者发生二次碰撞,物料再次产生较高的应力应变。由仿真结果可知,当送料盘转速为1 200 r/min时,物料产生的最大等效应力超过物料材料的屈服强度,将导致物料严重破损,无法投入生产。
表3 转速-时间步

Tab.3 Rotational speed-time step
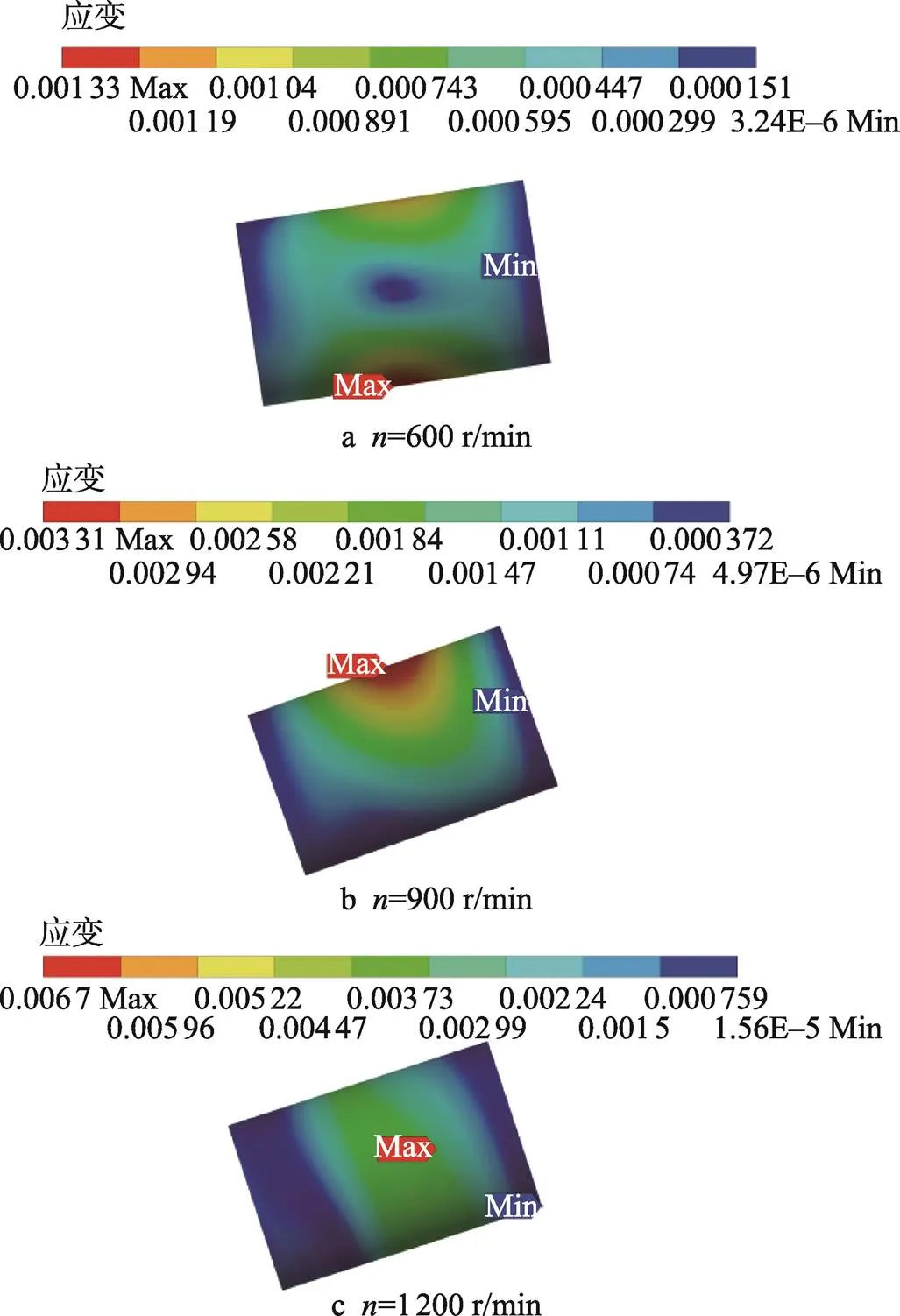
图6 固性物料等效应变云图
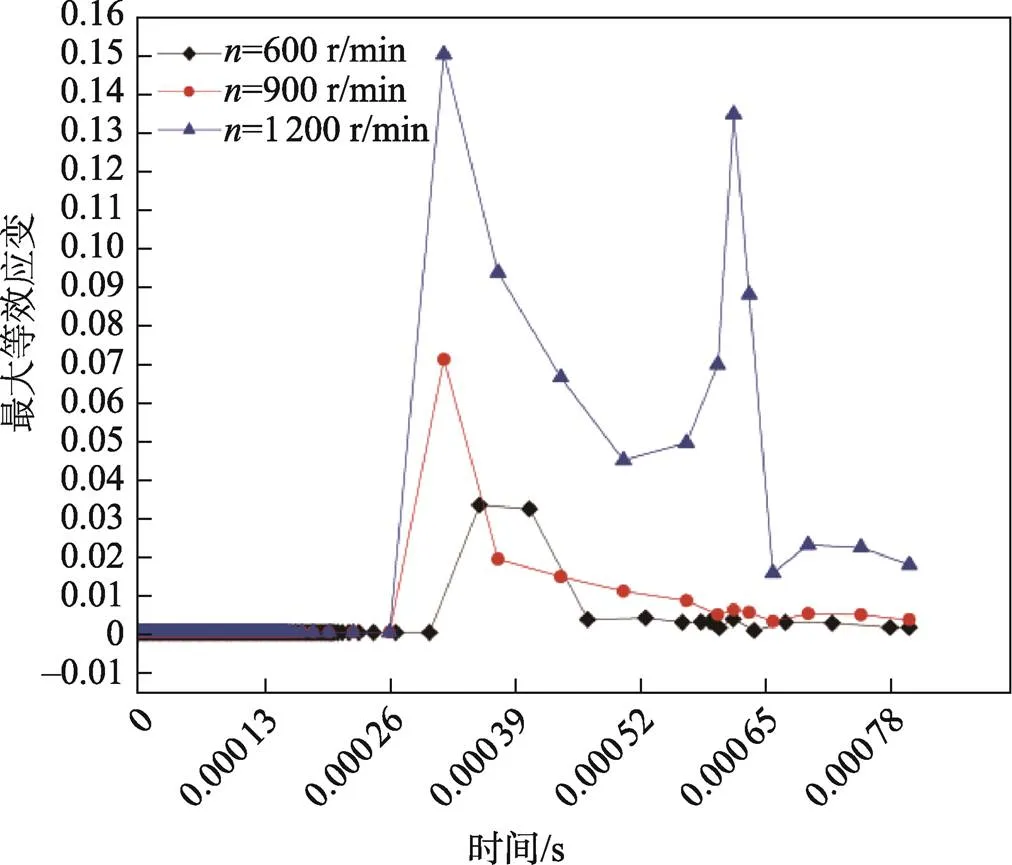
图7 不同转速下固性物料时间-最大等效应变
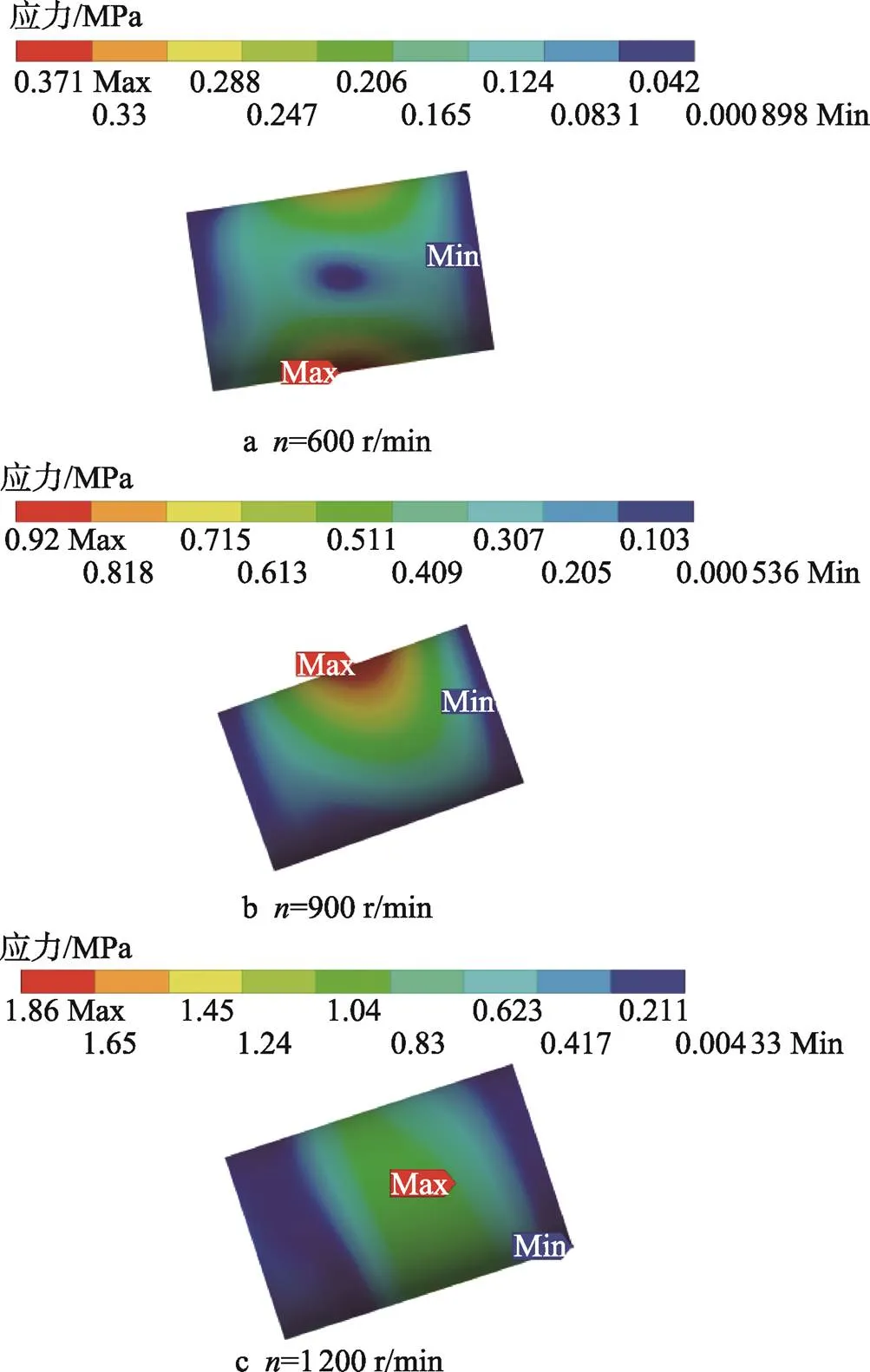
图8 固性物料等效应力云图
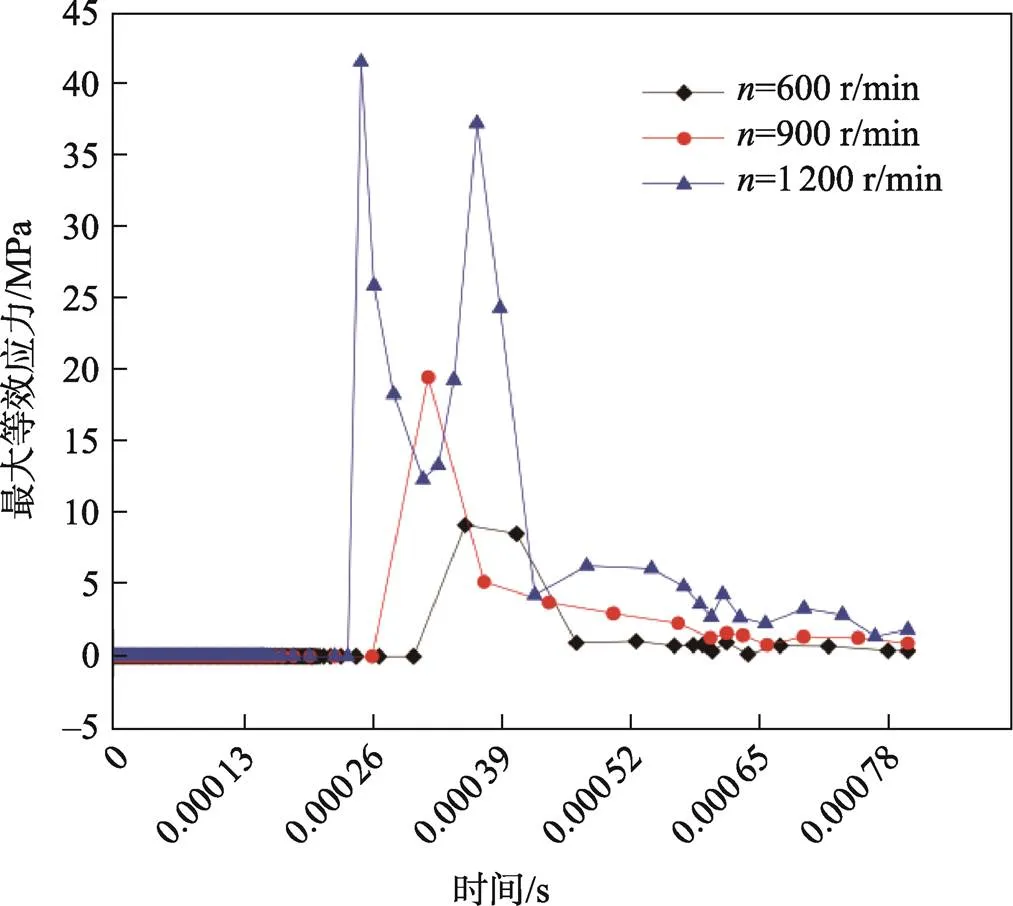
图9 不同转速下固性物料时间-最大等效应力图
4 完好率试验测试
为了验证小型固性物料瞬态碰撞仿真结果的准确性,进行物料添加试验,得到不同转速下的实际取料数,并与物料在不同转速下的最大等效应力、应变结果对比。同时在保证机构设计的可靠性以及稳定性的前提下,研究物料完好数与转运料转速之间的关系[15]。
4.1 试验指标的确定
在物料所能承受的极限转速下,转速越快,转运盘取料数越多,但机器对物料的损伤程度越高。随着转料盘转速越高,物料受到的瞬态冲击载荷越大,应变值越大,导致其破裂破损的可能性越大,破坏类型主要为上表面破裂、侧面变形、下底面破损,如图10所示。
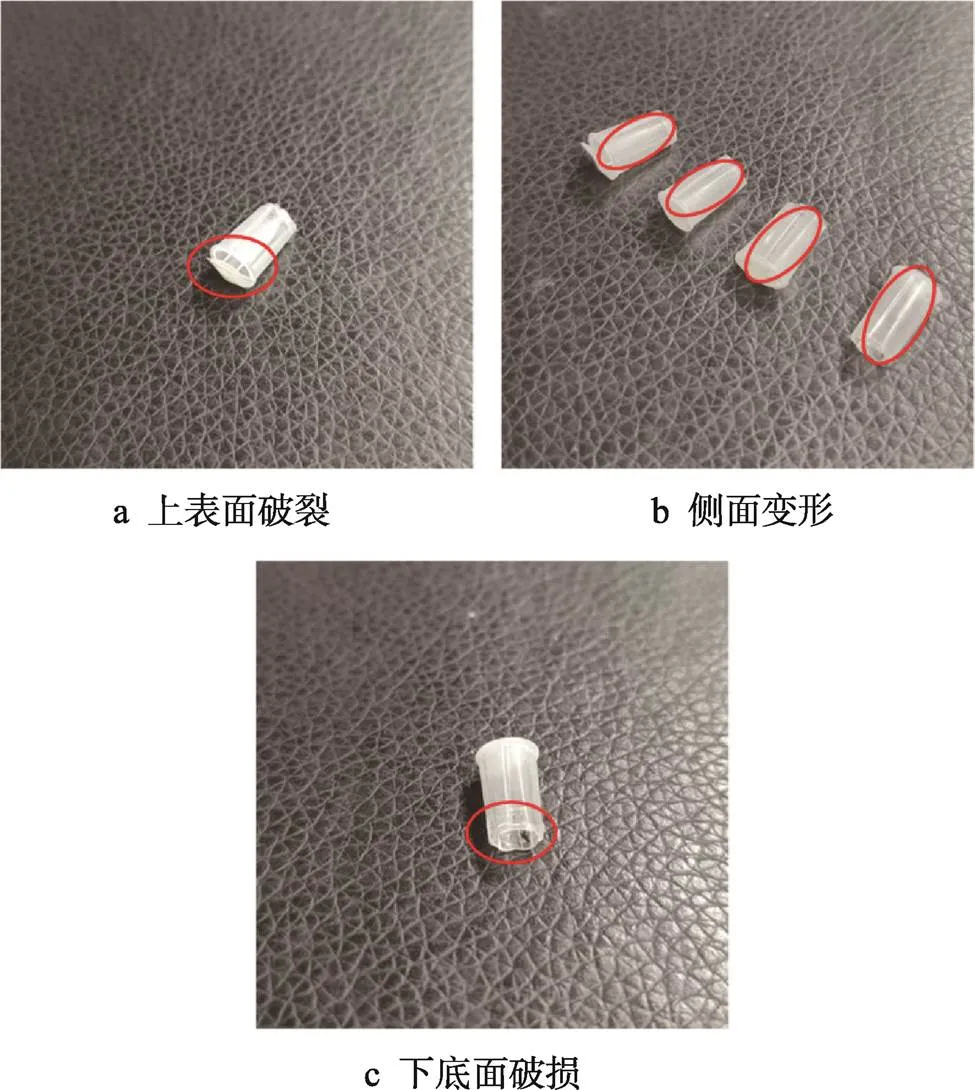
图10 物料破损类型
综合考虑生产效率和生产成本,在完好率>95%的前提下,将单位时间内转运盘的取料完好数作为评价指标,计算式如下:
理论取料数=(1)
式中:理论取料数为转料盘的理论取料总数;为转料盘转速,r/min;为运转时间,min;完好率为小型固性物料的完好率,%;完好数为小型固性物料完好总数。
4.2 试验及结果分析
物料运料机构实验平台如图11所示。
4.2.1 仿真结果验证试验
测试分3组转速,为减小随机误差,每组重复测试15次,每次测试时间10 min,并记录每次试验转料盘取料总数,得出转速与取料数、完好数的变化曲线,如图12所示。当=600 r/min时,理论取料数为12 000个,实际取料数平均值为11 796个,其中物料完好数平均值为11 578个;当=900 r/min时,理论取料数为18 000,实际取料数平均值为16 848,其中物料完好数平均值为10 633个;当=1 200 r/min时,理论取料数为24 000,实际取料数平均值为21 528个,其中物料完好数的平均值为888个。结果表明,当转料盘为1 200 r/min时,小型固性物料损耗严重,该结果与仿真结果相符。
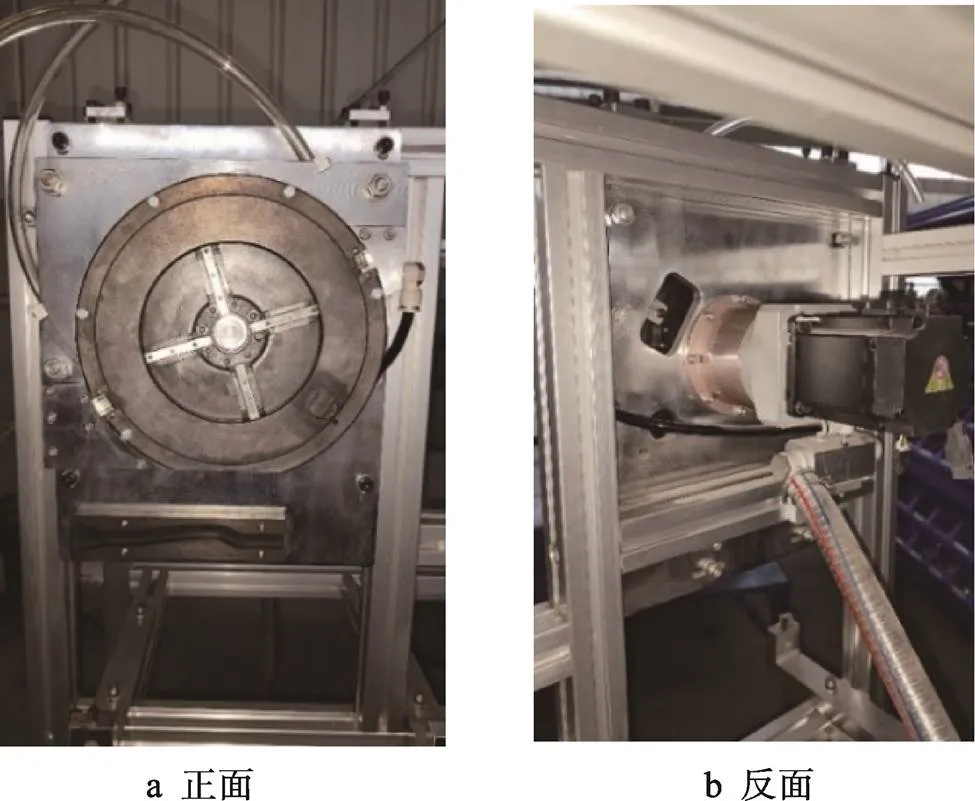
图11 转运料装置实验平台
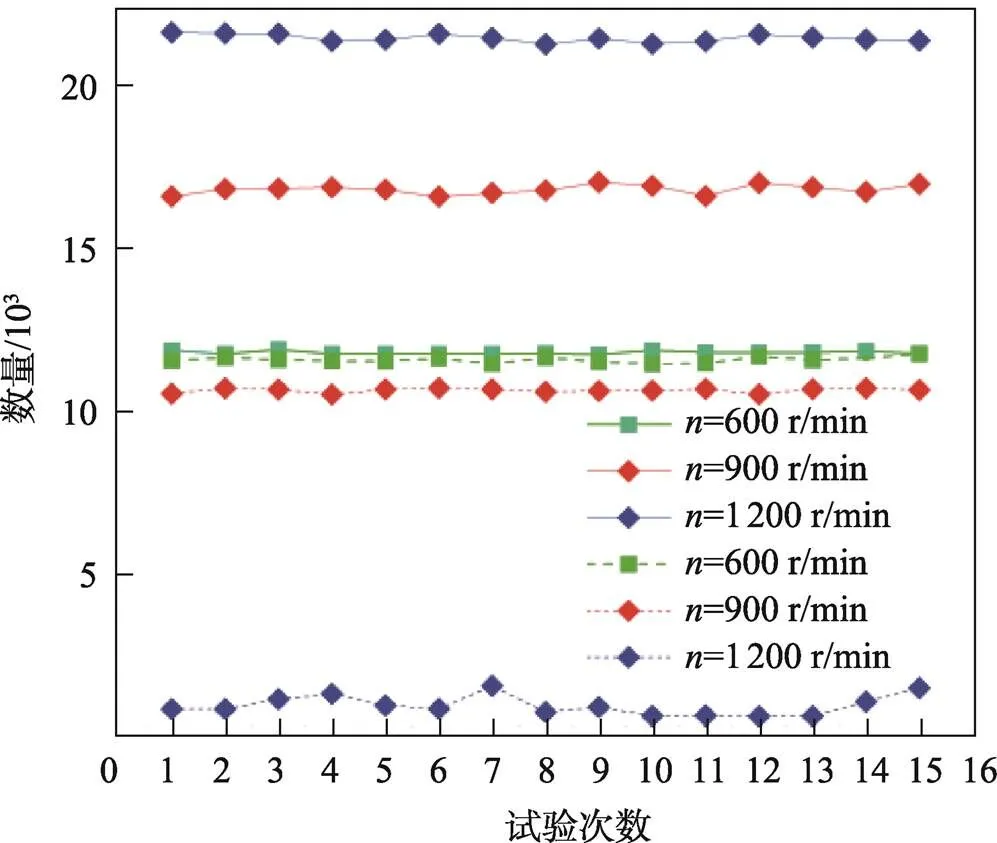
图12 转速-取料数、完好数变化曲线
注:实线表示取料数,虚线表示完好数。
4.2.2 转速优化试验
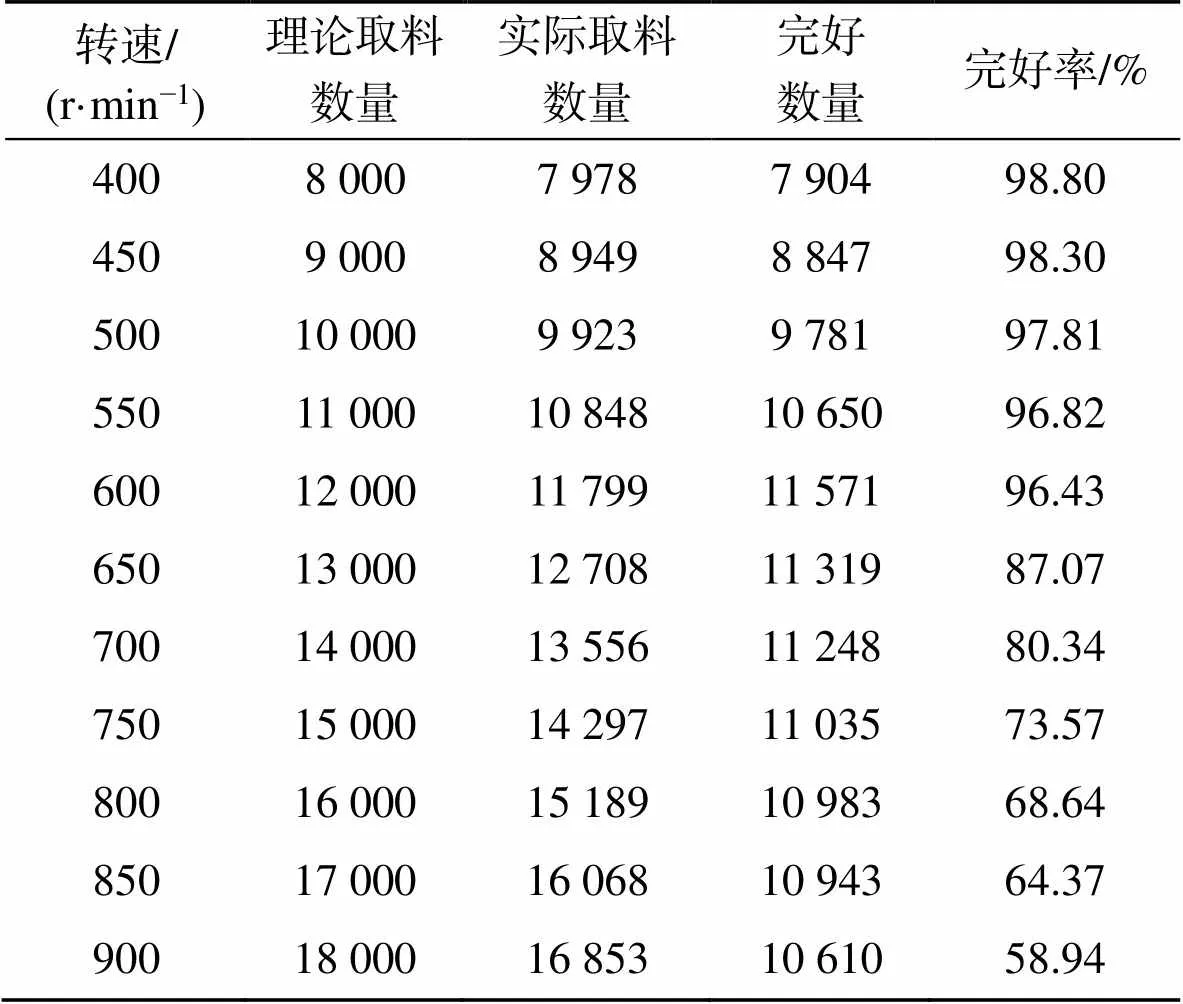
基于上述试验结果,在保证物料完好率较高的前提下,为最大提高生产效率,在400~900 r/min内寻找最优转速。试验设计:以50 r/min为转速间隔,分11组不同转速运转10 min,记录相同时间不同转速下物料完好数,试验结果如图13所示。由图13可知,当转速越高,相同时间内的物料完好数呈现先增加后降低的趋势。当转速从400 r/min开始增加时,由式(1)可得当转速提高,单位时间内取料数越多,且此时物料受到的冲击载荷较小,故完好数逐步增加。当转速超过某一值时,转速越高,物料受到的冲击碰撞载荷越大,物料完好率越低,故物料完好数逐步减小。
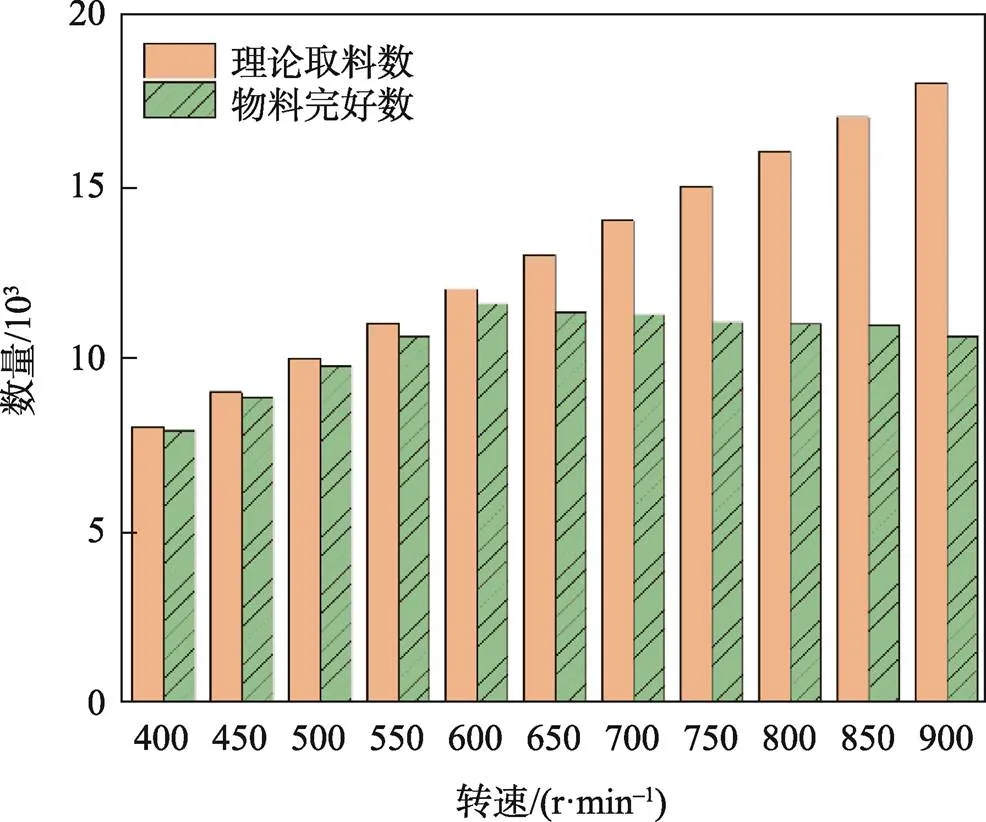
图13 不同转速下理论取料数-完好数对比
根据式(2)计算可得不同转速下物料完好率,结果如表4所示。
表4 转速与完好率的关系
Tab.4 Relationship between rotational speed and quantity of intact rate
由表4可知,在完好率>95%的前提下,当转料盘转速为600 r/min时,物料完好数最多,生产效率最高。
5 结语
1)开发出一种针对异形易碎小型固性物料的转运料装置,并利用设备进行试验,验证了该装置结构设计合理,可靠性较高,可满足在高速连续状态下转、运物料的工作需求。
2)通过ANSYS Workbench软件的Transient Structual模块对转运料装置的取料动作进行瞬态动力学仿真分析,得出小型固性物料在不同转速下的等效应变、应力云图及对比曲线。仿真结果表明,当送料盘转速为1 200 r/min时,物料受到瞬态冲击碰撞产生的最大等效应力超过小型固性物料材料的屈服强度,将导致物料严重破损。
3)通过试验平台的试验结果与仿真结果对比分析可知,在保证物料完好率>95%的前提下,转运料装置转速在600 r/min时物料完好数最多,生产效率最高。
[1] 陆武慧. 基于SOLIDWORKS与ADAMS的推送料机械系统仿真分析[J]. 粘接, 2021, 42(11): 136-139.
LU Wu-hui. Simulation Analysis of Feeding Mechanical System Based on SOLIDWORKS and ADAMS[J]. Adhesion, 2021, 42(11): 136-139.
[2] 袁保证. 浅谈我国复合滤棒成型设备现状与发展[J]. 中国新技术新产品, 2013(2): 143.
YUAN Bao-zheng. Discussion on the Present Situation and Development of Composite Filter Rod Forming Equipment in China[J]. China New Technologies and New Products, 2013(2): 143.
[3] 曹劲草. 一种红枣去核机上料机构的设计与分析[J]. 包装与食品机械, 2021, 39(1): 62-65.
CAO Jin-cao. Design and Analysis of an Automatic Feeding Mechanism of Red Jujube Pitting Machine[J]. Packaging and Food Machinery, 2021, 39(1): 62-65.
[4] 田野, 孙智慧, 郑赛男, 等. 包装机中推料机构分析及优化[J]. 包装工程, 2013, 34(21): 66-70.
TIAN Ye, SUN Zhi-hui, ZHENG Sai-nan, et al. Analysis and Optimization of Feeding Mechanism of Packaging Machine[J]. Packaging Engineering, 2013, 34(21): 66-70.
[5] 姚林晓, 邱海亮, 方贵盛. 牙刷自动装配机上料机构的仿真分析与改进[J]. 机械设计与制造, 2022, 372(2): 103-107.
YAO Lin-xiao, QIU Hai-liang, FANG Gui-sheng. Simulation Analysis and Improvement of Feeding Mechanism of Automatic Toothbrush Assembly Machine[J]. Machinery Design & Manufacture, 2022, 372(2): 103-107.
[6] 向飞, 李克天, 何卫锋, 等. 自动装盒机推料机构凸轮的设计及运动仿真[J]. 制造业自动化, 2014, 36(10): 137-139.
XIANG Fei, LI Ke-tian, HE Wei-feng, et al. Design and Kinematic Simulation of Pusher Mechanism in Automatic Cartoning Machine[J]. Manufacturing Automation, 2014, 36(10): 137-139.
[7] 冯砚博, 宋晓倩, 于瑞凤, 等. 小型粘性物料混合输送机构设计[J]. 包装工程, 2017, 38(21): 126-130.
FENG Yan-bo, SONG Xiao-qian, YU Rui-feng, et al. Design of Small Viscous Material Mixing and Conveying Mechanism[J]. Packaging Engineering, 2017, 38(21): 126-130.
[8] JAMEEL M, ZAMAN Q U, SCHUMANN A W, et al. Effect of Plant Characteristics on Picking Efficiency of the Wild Blueberry Harvester[J]. Applied Engineering in Agriculture, 2016, 32(5): 589-598.
[9] 王闻, 彭三文, 宋旭艳, 等. 一种内含水杯固件的烟用滤棒及卷烟: 中国, 201821913162.4[P]. 2019-11-29.
WANG Wen, PENG San-wen, SONG Xu-yan, et al. Tobacco Filter Rod and Cigarette Containing Water Cup Firmware: China, 201821913162.4[P]. 2019-11-29.
[10] 曹祥薇, 刘强, 彭三文, 等. 转接盘式空腔复合滤棒基棒转接装置的研制[J]. 烟草科技, 2021, 54(4): 96-99.
CAO Xiang-wei, LIU Qiang, PENG San-wen, et al. Development of Base Rod Transfer Device with Rotary Plates for Combined Cavity Filter Rods[J]. Tobacco Science & Technology, 2021, 54(4): 96-99.
[11] 赵九峰. 基于瞬态动力学的碰碰车低速碰撞仿真研究[J].自动化仪表, 2022(004):043.
ZHAO Jiu-feng. Simulation Study of Bumper Car Low-Speed Collision Based on Transient Dynamics[J]. Automation Instrumentation, 2022(4): 43.
[12] 王素粉. 基于ANSYS选矸机械臂瞬态动力学分析研究[J]. 煤炭技术, 2021(11): 40.
WANG Su-fen. Research on Transient Dynamics Analysis of Gangue Selecting Robotic Arm Based on ANSYS[J]. Coal Technology, 2021(11): 40.
[13] 陈成军, 陈小伟, 柳明. 接触-碰撞算法研究进展[J]. 计算力学学报, 2018, 35(3): 261-274.
CHEN Cheng-jun, CHEN Xiao-wei, LIU Ming. Review of Research Progress in Contact-Impact Algorithms[J]. Chinese Journal of Computational Mechanics, 2018, 35(3): 261-274.
[14] CHEN Hu, ZHANG Y X, ZANG Meng-yan, et al. An Explicit Lagrange Constraint Method for Finite Element Analysis of Frictionless 3D Contact/Impact Problems[J]. Applied Mechanics and Materials, 2014, 553: 751-756.
[15] 谢苗, 裴波波, 刘治翔, 等. 清煤机运料螺杆的性能和仿真磨损试验分析[J]. 机械强度, 2022, 44(1): 155-161.
XIE Miao, PEI Bo-bo, LIU Zhi-xiang, et al. Performance Analysis and Wear Mechanism Research of Feeding Screw of Coal Cleaning Machine[J]. Journal of Mechanical Strength, 2022, 44(1): 155-161.
Structure Design and Characteristic Test of Transfer Device for Small Special-shaped Fragile Solid Materials
CHENG Kai, ZHONG Fei*,YANG Xiao-jun, ZHOU Hong-di
(School of Mechanical Engineering, Hubei University of Technology, Wuhan 430068, China)
The work aims to develop a transfer device to meet the addition requirements of small special-shaped fragile solid materials. Transient dynamics simulation and analysis method was adopted to carry out transient dynamics simulation and analysis on small solid materials subject to impact and collision with ANSYS WorkBench software and to study the maximum rotational speed that the materials could withstand. The reliability and stability of the device were verified by setting up a platform for the physical transfer test, and the optimal rotational speed was obtained to improve the production efficiency. According to the simulation results, the maximum rotational speed that the materials could withstand was 1 200 r/min, otherwise the materials failed. According to the test of transferring materials, the structure design of the device is reasonable, which can meet the working requirements of transferring materials in the continuous high-speed state, and achieve the maximum quantity of intact materials and the highest production efficiency at 600 r/min.
transfer device; material addition; Workbench; transient dynamics
TB486;TH6;TH16
A
1001-3563(2023)23-0156-08
10.19554/j.cnki.1001-3563.2023.23.019
2023-03-07
国家自然科学基金(52005168);湖北工业大学高层次人才基金项目(BSQD2020010);现代制造质量工程湖北省重点实验室开放基金项目(KFJJ-2021012)
责任编辑:曾钰婵
猜你喜欢
中学生数理化·七年级数学人教版(2022年10期)2022-11-11
防爆电机(2020年3期)2020-11-06
数学年刊A辑(中文版)(2019年3期)2019-10-08
制造技术与机床(2019年8期)2019-09-03
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
北京航空航天大学学报(2017年6期)2017-11-23
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
浙江大学学报(工学版)(2016年10期)2016-06-05
中国光学(2015年5期)2015-12-09