
考虑磨损的3z-Ⅱ型行星轮系传动误差特性研究
2023-12-20 13:47:00张海滨徐津强江军毅张汇赵卫芳周同星熊杨寿黄康
机床与液压 2023年22期
张海滨,徐津强,江军毅,张汇,赵卫芳,周同星,熊杨寿,黄康
(1.安徽智寰科技有限公司,安徽合肥 230601;2.大港油田第四采油厂电力管理站,天津300450;3.新疆油田公司数据公司,新疆克拉玛依 834000;4.航空结构件成形制造与装备安徽省重点实验室,安徽合肥 230009)
0 前言
行星减速器具有体积小、质量轻、传动比大、扭矩大等优点,广泛应用于机器人关节、工程机械、仪器仪表等各个行业。无论应用在何种场合,都要保证其运动的平稳、可靠,即要求较高的传动精度。减速器工作过程中会产生不同程度的齿面磨损,使得使用过程中传动精度逐渐降低,最终影响传动的准确性和可靠性。因此,研究齿面的磨损情况及定量分析齿面磨损对传动精度的影响程度,对降低磨损对传动误差的影响具有重大意义。
国内外学者对减速器的传动精度进行了大量研究,并取得了诸多成果。传动误差是衡量减速器传动精度的主要指标,主要由齿轮加工误差以及安装偏心误差产生[1-4]。CHAARI 等[5]建立了考虑偏心误差和齿形误差的行星齿轮系统动力学模型,分析了误差对系统动力学特性的影响。VELEX、 AJMI[6-7]基于六自由度动力学模型研究了齿廓修形对传动误差的影响。JIN等[8]分析了影响RV减速器传动误差的各种因素,并通过实验证明了偏心误差和摆线轮的等距变形影响最大。邓效忠等[9]通过理论分析及实验验证了齿距啮合偏差对传动误差的影响。王朝兵等[10-12]建立了行星齿轮系统的传动误差模型,并利用耦合补偿的方法降低了传动误差。以上文献对传动精度的研究没有考虑其他不确定因素,尤其是磨损对传动精度的影响,很难反映真实工况下减速器的传动精度。而在精密传动中磨损等不确定因素的影响不能忽视,文中考虑减速器在额定工况下的齿面磨损这一因素。国内外学者对齿轮磨损理论及磨损量的计算预测方法进行了许多研究。目前使用最为广泛的磨损模型是Archard磨损模型[13-14],学者们又基于该模型提出了许多预测齿轮磨损量的模型方法。WU、 CHENG[15-16]将齿轮的接触等效为时变圆柱体接触问题,并提出了滑动磨损模型。RAO等[17-18]通过试验确定不同工况下磨损系数的经验公式。FLODIN、 ANDERSSON[19-21]提出计算渐开线齿廓接触压力和相对滑动距离的方法,并结合Archard磨损模型,建立直齿轮和斜齿轮的磨损预测模型。张俊等人[22]利用赫兹理论和Archard磨损公式,建立面向真实工况的直齿圆柱齿轮准静态磨损模型。
本文作者综合考虑3z-Ⅱ型行星减速器各构件的加工误差、安装误差、齿廓偏差、齿厚偏差及齿距偏差等短周期误差以及运行过程中的齿面磨损等因素,对某3z-Ⅱ型行星减速器的传动误差展开研究。考虑上述加工安装误差,建立整个3z-Ⅱ型行星齿轮系的传动误差模型,结合Archard磨损模型和赫兹接触模型理论,建立行星齿轮系统的磨损模型,并基于各齿轮磨损量建立考虑磨损的3z-Ⅱ型行星齿轮系的传动误差模型。
1 传递误差模型的建立
传动误差是指输入轴单向回转时,输出轴的实际转角与理论转角的差值。它的主要影响因素包括齿轮系统各构件的加工偏心误差、安装偏心误差和齿轮的齿距偏差、齿廓偏差、齿厚偏差、齿侧间隙以及各构件的变形等误差。文中主要考虑具有随机性的误差,包括加工和安装偏心误差、齿距偏差、齿廓偏差、齿厚偏差。
1.1 一对齿轮传动误差
根据传动误差的概念可以把一对齿轮的传动误差表示为
ET=θ′-θ
(1)
其中:θ为从动轮的理论转角;θ′为从动轮的实际转角。
式(1)中的理论转角容易算出,而实际转角却需要经过试验测得,故而式(1)主要用于对传动误差的实验分析及实验数据处理,不适合对传动误差的理论分析。理论分析需要用到当量啮合误差的概念,将各个来源误差转化为当量啮合误差,再把当量啮合误差转化为齿轮的转角,从而将各种来源误差与传动误差建立联系。当量啮合误差就是把加工、安装等各种误差投影到啮合线上得到的当量误差。加工偏心误差和安装偏心误差和啮合线不重合,需要投影到啮合线上;齿轮的齿距偏差、齿廓偏差和齿厚偏差可以认为在啮合线上,这样就只需要求出偏心类误差的当量啮合误差。齿轮副各齿轮偏心误差的当量啮合误差如表1所示。

表1 齿轮副各齿轮偏心误差的当量啮合误差
齿轮的齿距偏差、齿廓偏差和齿厚偏差有重合部分,不分别讨论,其当量啮合误差合计为f。综上所述,可以得到外啮合齿轮副啮合线上的当量啮合误差为
ew=eE1+eE2+eA1+eA2+f1+f2
(2)
同样地,内啮合齿轮副啮合线上的当量啮合误差为
en=eE1+eE2+eA1+eA2+f1+f2
(3)
1.2 3z-Ⅱ型行星传动系统传动误差模型
3z-Ⅱ型行星传动的构件主要包括太阳轮a、行星轮c、固定内齿圈b、内齿圈e和行星架H,其中太阳轮a作为输入端,内齿圈e为输出端,其结构示意如图1所示。整个减速器的传动误差可以看作是数对内啮合齿轮和外啮合齿轮传动误差的组合。
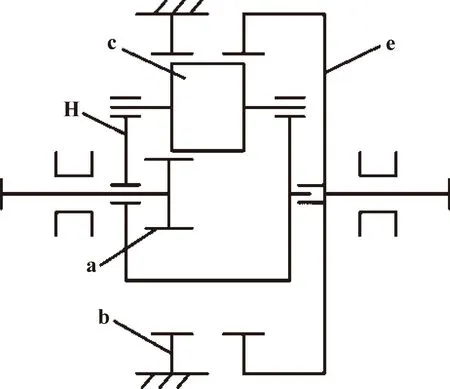
图1 3z-Ⅱ型行星传动结构
其中内齿轮b固定,可认为不存在安装误差,各轴承、行星轴等构件的公差引起的误差均计入到安装误差内,行星架加工偏心误差包含在其他偏心误差内,不单独考虑。
减速器各构件的偏心误差及其相应的当量啮合误差表示如表2所示。
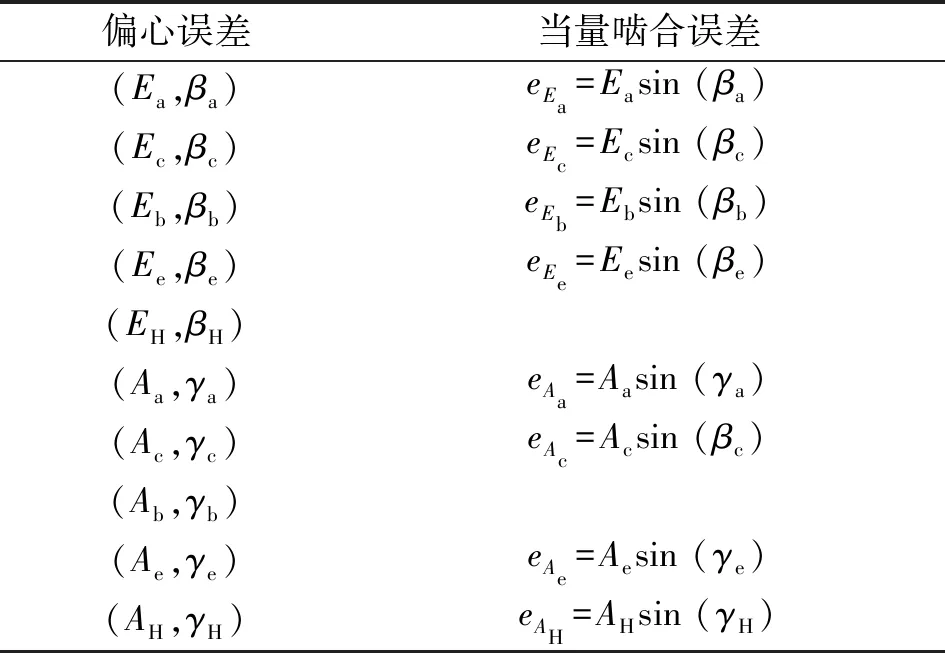
表2 各齿轮偏心误差的当量啮合误差
对各个齿轮产生的传动误差单独分析,可以得到反映到各个齿轮自身转动的转动误差,其表达式为
(4)
(5)
(6)
(7)
各齿轮的传动误差通常根据传动比转化到输出轴上,并且以角度值的形式表示,整个减速器的传动误差为
(8)
2 齿轮啮合磨损计算模型
齿轮磨损是减速器运行过程中不可忽略的问题,随着工作时间增加,齿面磨损造成齿厚减薄增加,会使齿轮的传动精度下降,达到一定程度将影响正常使用。因此,在分析减速器的传动精度时,考虑磨损对传动精度的影响。齿轮磨损包括3个阶段:磨合阶段、稳定磨损阶段和急剧磨损阶段。考虑到行星减速器的润滑、工况较好,按照处于稳定磨损阶段分析。
2.1 磨损基本模型
齿轮在啮合过程中,由于轮齿间的相对滑动和滚动齿面会产生磨损。对于齿面任意啮合点处的磨损量,一般利用Archard磨损模型计算。齿面某啮合点的磨损量可表示为

(9)
式中:h为磨损深度;k为磨损系数;p为赫兹接触应力;s为相对滑动位移。
2.2 接触压力
对于渐开线齿轮,其啮合过程可以等效为以啮合点渐开线曲率为半径的两滚子圆柱间的啮合。为了获得任意接触点的压力,可利用赫兹接触理论,将接触点压力等效为两时变圆柱滚子情况。在齿轮法向载荷的作用下,以接触点为中心的一定范围内发生弹性变形,形成一个近似矩形的微小变形区,如图2所示,在该接触区内的接触压力称为赫兹应力,利用赫兹理论求得接触半宽a为
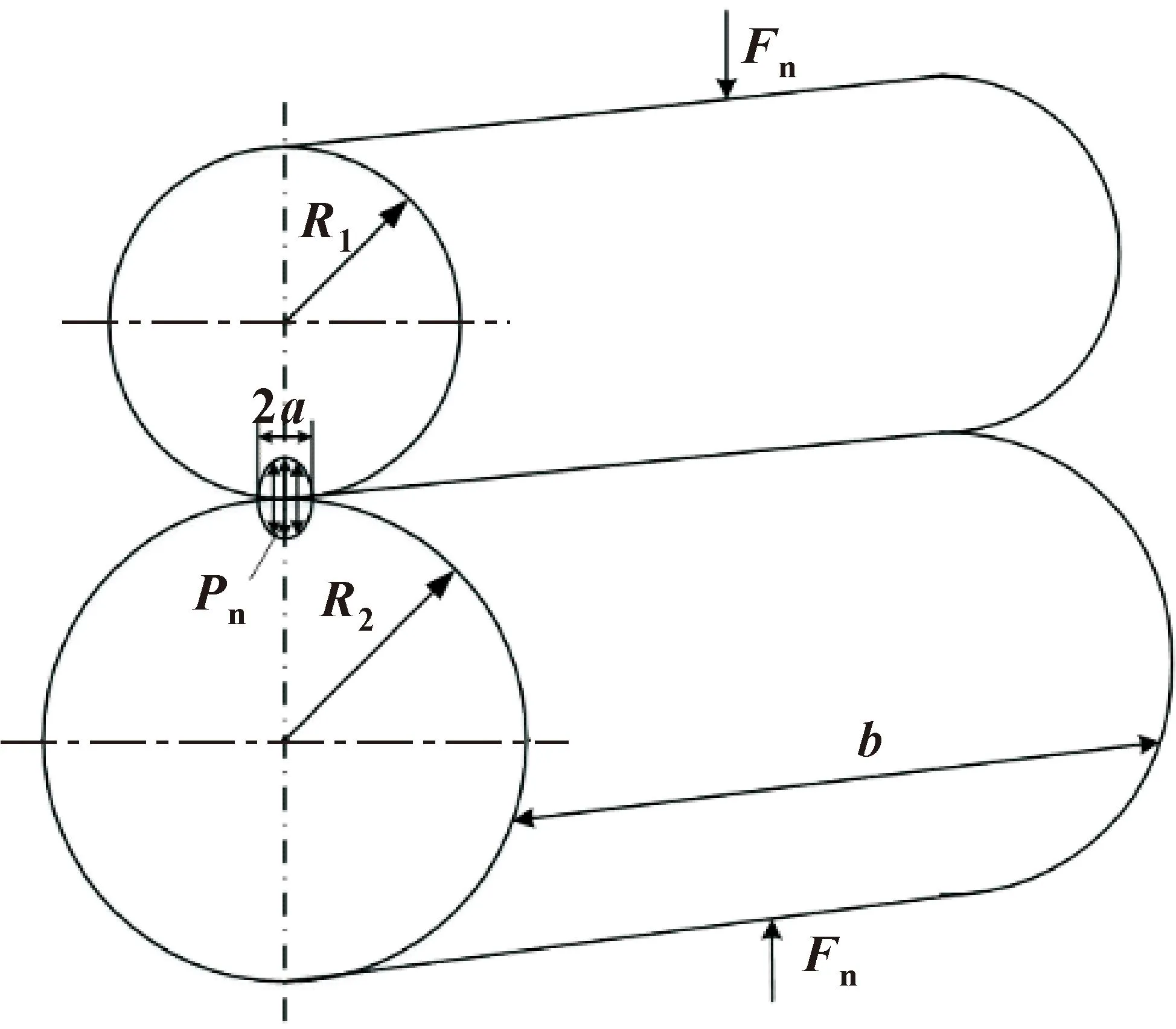
图2 接触应力示意
(10)
1/R′=1/R1+1/R2
(11)
(12)
其中:Fn为法向载荷;b为齿宽;R′为综合曲率;E′为等效弹性模量;R1、R2为接触点的曲率半径;E1、E2和ν1、ν2分别为两齿轮的弹性模量和泊松比。
任意接触点的曲率半径,即为该点到基圆切点的距离:
(13)
式中:r1、r2为齿轮分度圆半径;α′为啮合角;y为啮合点到节点的距离,且y=rb1(tanαp-tanα′),rb1为主动轮的基圆半径,αp为啮合点对应的圆心角。
由图2可以看出:赫兹应力在接触区域并非均匀分布,应力在接触中心区域最大,两侧逐渐减小,总体近似呈椭圆形分布,任意一点的接触压力为
(14)
2.3 磨损系数
齿轮磨损情况受齿轮材料、表面粗糙度、润滑条件以及负载的影响,根据前人总结可将这些因素对磨损的影响用一个系数来表示,称为磨损系数,用k表示。磨损系数是一个动态变化的数值,JANAKIRAMAN等[18]根据实验数据,运用统计学方法拟合出磨损系数的计算公式:
k=3.981×1029L1.219G-7.377S1.589/E′
(15)
式中:L、G、S分别为量纲一载荷、量纲一润滑剂压力-黏度系数、量纲一等效粗糙度;E′为齿轮副的等效弹性模量。上述各项参数的计算公式如下:
(16)
G=αE′
(17)
(18)

(19)
其中:Rq1、Rq2分别为两齿轮相啮合齿面的粗糙度,可根据齿轮公差等级查设计手册得到。
2.4 相对滑动距离
主动轮和从动轮齿廓的接触点p1、p2的圆周速度U1、U2可以表示为
(20)
点p1、p2的相对滑动距离为
(21)
2.5 磨损计算结果分析
以某3z-Ⅱ型行星减速器为例分析,传动比i=105,额定转速n=15 r/min,额定转矩T=167 N·m,其基本参数如表3所示,为反映实际工作中的磨损,各参数均按照额定值分析。
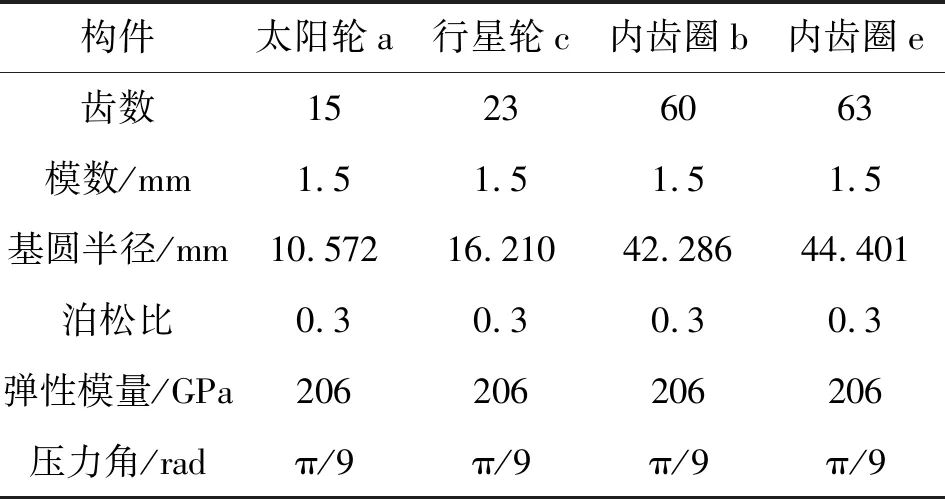
表3 各齿轮参数
根据以上磨损模型,结合实例参数对各齿轮不同工作时间的磨损情况进行仿真分析,得到各齿轮齿面的磨损量如图3—6所示,图中横坐标为齿廓各点到轴心的距离。可以看出:各齿轮节圆处磨损量最小,齿根(半径10.572 mm处)和齿顶(半径最大处)处磨损较严重,并且齿根处的磨损最为严重,符合实际情况。并且行星轮c和太阳轮a的磨损量最大,内齿圈b的磨损量也较内齿圈e大,说明靠近输入端的磨损较为严重。

图3 不同工作时间下齿轮a磨损深度
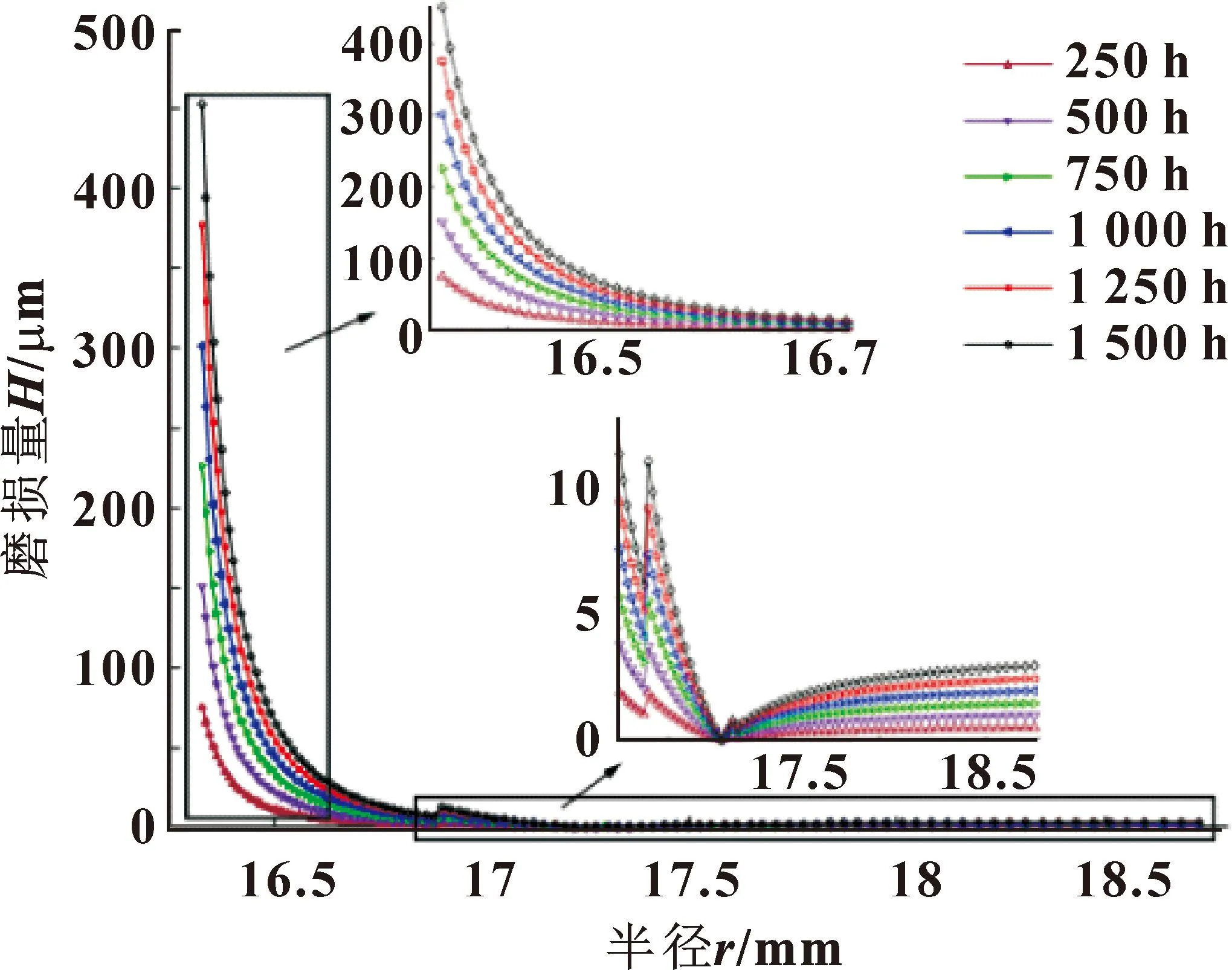
图4 不同工作时间下齿轮c磨损深度
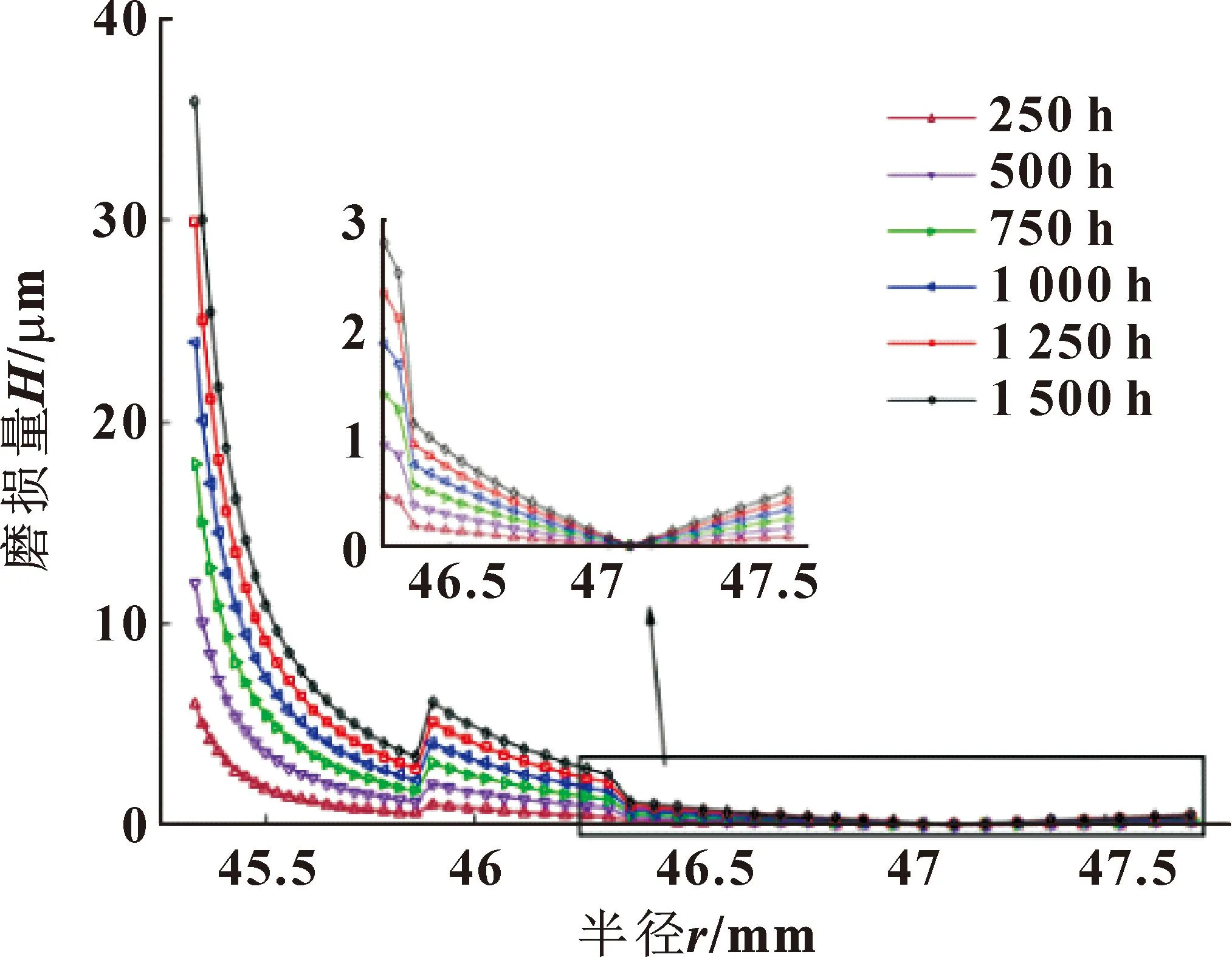
图5 不同工作时间下齿轮b磨损深度

图6 不同工作时间下齿轮e磨损深度
3 传动误差仿真分析
由于减速器传动误差的各种加工和安装偏差、公差都是随机变量,因此实际过程中其传动误差不会是定值,而是会出现各种可能的情况。为了更准确地反映实际情况,需要对减速器的传动误差这一整体随机变量进行蒙特卡罗方法模拟计算,得到预测值。
蒙特卡罗模拟的基本思想是:针对实际存在的一些不确定性问题,假定一个符合实际要求的概率模型或随机过程,令其参数等于问题的解;通过大量的模拟抽样可得问题的近似解。
利用蒙特卡罗进行传动误差分析时,通常步骤为:
(1)根据国标给出的各项误差数值,由上述逆变换公式抽样,得出一个抽样值;
(2)将上述抽样值代入公式(8)进行计算,得出这一随机变量的抽样值;
(3)重复步骤(2)N次(N=1 000),得到N个齿轮系统传动误差的抽样值,最后即可得到传动误差的基本范围。
齿轮的加工偏心误差E可用(F′i-f′i)/2和f′i/2综合表示,它们都服从瑞利分布;齿轮的安装偏心误差可用A表示,其服从正态分布;偏心误差存在相位角θ,其在[0,2π]内服从均匀分布。
3.1 各随机变量的抽样公式及分布参数的确定
若R1、R2均为[0,1]区间上服从均匀分布的随机变量,则产生瑞利分布随机变量X的抽样公式[23]为
(22)
其中:η为其分布参数。
产生正态分布随机变量Y的抽样公式为
(23)
其中:μ为Y的均值;σ为Y的方差。
产生均匀分布随机变量Z的抽样公式为
Z=2πR1
(24)
随机变量X、Y的取值都在其相应公差范围内随机变动。对于随机变量X,取置信度为99.7%,则分布参数取值应为
(25)
其中:μ为X的分布参数。
对于服从正态分布的随机变量Y,可按3σ原则,取置信度为99.7%,则均值和标准差为
(26)
其中:μ为Y的均值;σ为Y的方差。
以文中提到3z-Ⅱ型行星减速器为研究实例,太阳轮a为输入端,内齿圈b固定在箱体上,3个行星轮与行星架是浮动的,内齿圈e作为轮系的输出端。内齿圈b作为基准,故不存在安装偏心误差。各齿轮的精度等级为6级,模数均为1.5 mm。此实例各参数与磨损计算中完全相同,其余参数如表3所示。
按照公差标准查找各齿轮公差值,并计算出相应的分布参数,减速器各部分的公差和分布参数如表4所示[24]。
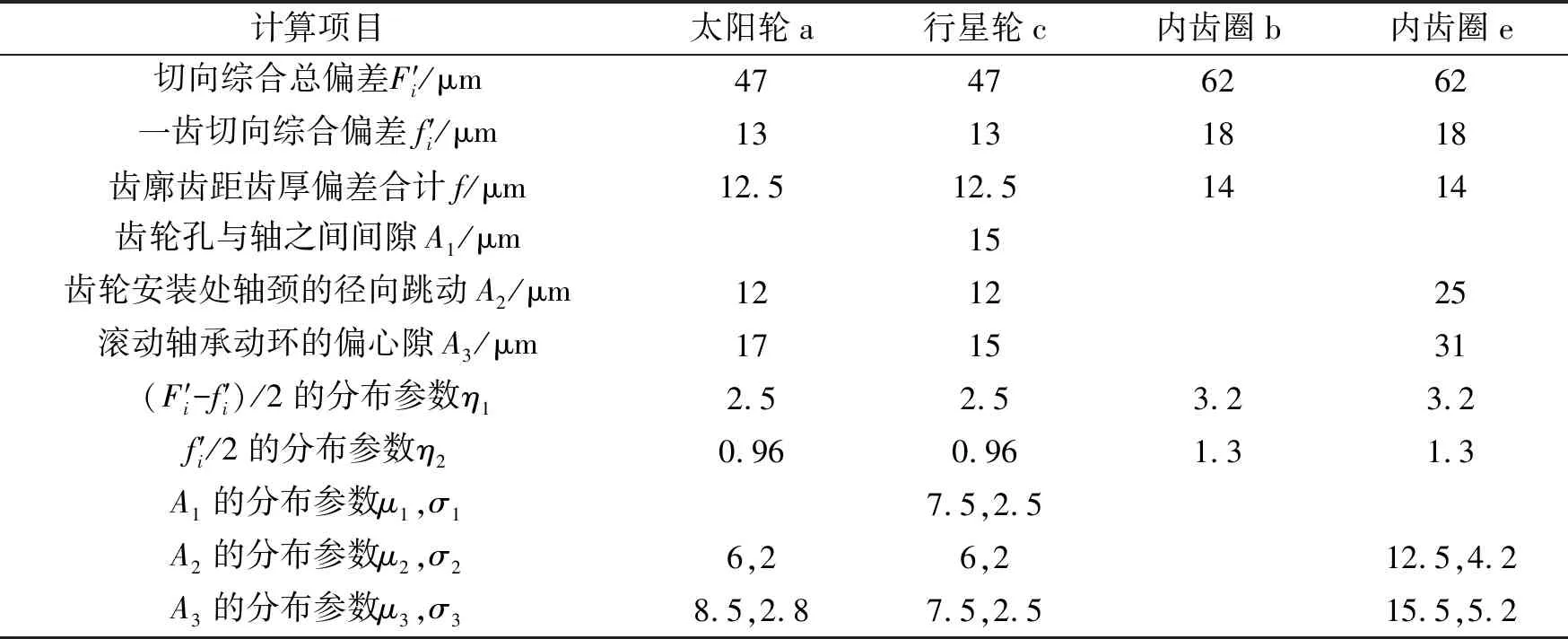
表4 齿轮公差与分布参数
3.2 不考虑磨损时的传动误差
在不考虑磨损的情况下,利用蒙特卡罗模拟计算减速器的传动误差。在MATLAB中编程,将表4中各项公差的分布参数代入各个抽样公式,利用rand函数生成1 000个0~1内的随机数,将抽样公式的结果代入第1.2节的公式(8)中进行计算,得到减速器传动误差的1 000个随机数,仿真结果如图7所示。
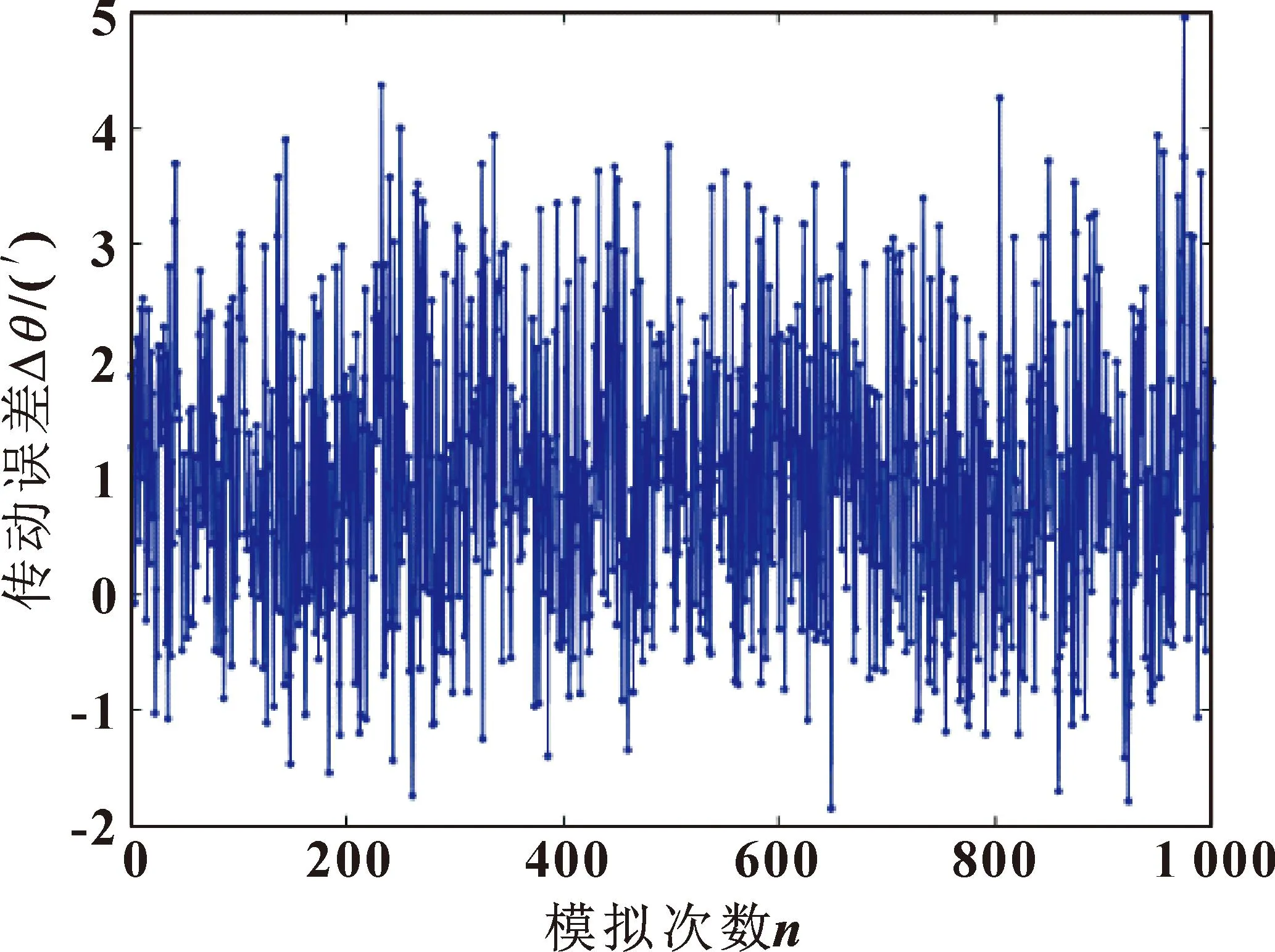
图7 无磨损时减速器的传动误差
从图7可以看出:利用蒙特卡罗方法计算出的传动系统传动误差主要集中在-0.83′~3.07′,平均值为1.25′,负号表示输出端实际转角相对于理论转角滞后。
3.3 考虑磨损的传动误差
由于齿面磨损会对传动误差产生影响,磨损存在于齿面上,因此可以将磨损等效为齿廓偏差进行分析。为便于分析,假设理想情况下,同一齿轮上的所有轮齿齿面的磨损情况相同。尽管如此,其实磨损深度在同一轮齿上的不同部位也不相同,考虑到传动精度的要求,取最大磨损量进行传动误差分析,并且按减速器工作1 000 h时各齿轮的磨损量分析。同样利用蒙特卡罗方法,将磨损量等效为齿廓偏差进行分析,具体步骤与第3.2节中相同,仿真结果如图8所示。
从图8可以看出:考虑磨损时整个传动系统的传动误差有所增加,传动误差集中在-0.42′~3.75′,平均值为1.71′,同时相比无磨损时,正向传动误差增大,误差滞后降低。
4 结论
文中对3z-Ⅱ型行星系统的传动误差进行分析,建立磨损模型和传动误差模型,对比分析磨损对传动误差的影响,得到如下结论:
(1)建立了3z-Ⅱ型行星齿轮系的传动误差模型,并利用蒙特卡罗法得出无磨损情况下,3z-Ⅱ型行星齿轮系理论传动误差在置信度为0.997下的置信区间为[-0.83′,3.07′],平均值为1.25′。
(2)建立了3z-Ⅱ型行星齿轮系的齿面磨损模型,根据仿真结果分析,靠近输入端的齿轮齿面磨损最为严重,其次是行星轮和固定内齿圈,输出内齿圈磨损较轻。
(3)考虑磨损的3z-Ⅱ型行星齿轮系传动误差在置信度为0.997下的置信区间为[-0.42′,3.75′],平均值为1.71′。计算表明:工作1 000 h的磨损量对系统传动误差有较明显的影响,并且使传动误差的滞后量显著降低。
猜你喜欢
中国设备工程(2023年4期)2023-02-28 10:26:54
重型机械(2020年3期)2020-08-24 08:31:46
制造技术与机床(2019年11期)2019-12-04 05:50:18
铁道通信信号(2019年10期)2019-11-25 09:40:54
中国特种设备安全(2019年7期)2019-09-10 07:30:56
军事文摘(2018年24期)2018-12-26 00:57:40
制造技术与机床(2017年12期)2017-02-02 07:05:05
光学精密工程(2016年4期)2016-11-07 09:04:57
西南交通大学学报(2016年6期)2016-05-04 04:13:08
现代商贸工业(2016年35期)2016-04-09 06:59:58
