
基于深度迁移学习的矿井通风机轴承故障诊断
2023-12-20 13:46:34王克定李敬兆石晴胡迪
机床与液压 2023年22期
王克定,李敬兆,石晴,胡迪
(1.安徽理工大学电气与信息工程学院,安徽淮南 232001;2.淮北合众机械设备有限公司,安徽淮北 235000)
0 前言
矿井通风机作为煤矿大型旋转机械设备之一,其正常运行是矿山安全生产的前提[1-2]。而轴承作为旋转机械最关键的部件,常受磨损和环境因素影响,故障发生率较高[3]。因此,研究轴承故障诊断方法对于保障煤矿机械设备的高效运行具有重要意义。
近年来,基于深度学习的故障诊断方法因对故障信息自提取与分类特性,且不依赖专门知识和专家经验,成为轴承故障诊断领域的主流方法[4-5]。其中,CNN网络因极大简化诊断步骤被广泛使用,雷春丽等[6]提出采用马尔科夫转移场编码方式将原始一维振动信号转换为二维特征图形,输入CNN网络中进行滚动轴承故障诊断;丁承君等[7]结合变模态分解与深度CNN网络实现滚动轴承故障类别以及损伤程度的精准判定;DING、 HE[8]利用小波包能量作为CNN网络的输入,实现对轴承故障诊断;陈保家等[9]提出一种CNN网络与长短时记忆网络结合的深度神经网络应用于滚动轴承故障诊断。上述深度学习模型依靠对深层次特征的自提取与识别分类,在轴承故障诊断中获得较高的诊断准确率,但深度学习模型需要大量有标签数据作为支撑,且训练集与测试集要满足同分布[10]。然而,煤矿大型旋转机械设备在实际运行过程中故障数据获取困难,导致有标签故障数据较少。因此利用小样本重新训练深度学习模型未必能取得较好的诊断效果。
为了解决上述问题,迁移学习(Transfer Learning,TL)在故障诊断方面得到了广泛关注,迁移学习旨在通过源域的可转移特征信息,建立与目标域共享的特征信息,弥补目标域样本不足的缺点[11]。因此,本文作者综合深度学习模型与迁移学习(TL)的优点,先构建一种CNN-BiGRU-RF的深度学习模型,利用源域充足样本训练取得高精度分类效果;再引入迁移学习,完成模型参数迁移,并利用少量目标域有标签数据微调模型参数,得到适用于目标域的故障诊断模型,在缺乏大量负样本的条件下实现目标域故障识别。
1 CNN-BiGRU-RF诊断算法
1.1 CNN网络
CNN网络是深度学习经典模型之一,主要包括卷积层、池化层、全连接层[12]。其中卷积层以卷积核为核心,通过卷积核的卷积计算,自提取输入信号隐含的空间特征信息,卷积计算过程如下:
(1)
池化层是对经卷积层提取的空间特征信息进行降维,并突出明显的特征信息。文中采用最大池化作为池化方式,其计算过程为
(2)
式中:L为池化局部区域长度。
全连接层通常与Softmax分类器组合使用,进一步计算经卷积池化后的特征信息,实现故障分类。
1.2 BiGRU网络
因轴承的一维时序信号各数据点之间存在隐藏的相互依赖关系,而传统CNN网络更多的是提取空间特征,忽略了时间依赖特征。因此,文中结合BiGRU网络捕捉轴承数据在时间序列前后的特征信息,提取更深层次、更全面的特征,达到更好的识别效果。
BiGRU网络在结构上由2个运算方向相反的门控循环单元(GRU)组成[13],如图1所示。BiGRU网络的输出是由2个GRU运算结果共同决定,具体运算过程如下:

图1 BiGRU结构
(3)
(4)
(5)

1.3 RF分类器
随机森林算法由BREIMAN提出,它是由多个决策树组成的集成分类器模型。利用Bootstrap重采样方法训练决策树,构建关联度小的决策树,然后利用决策树得到样本的分类结果,最终结果由每颗决策树投票决定[14]。
相比传统CNN网络中采用的Softmax分类器,RF分类器只有2个参数,对参数不敏感,避免了复杂的梯度计算操作;同时对于含噪信号具有较好的降噪效果且各决策树之间关联性小,不容易过拟合,对小样本具有更好的分类效果。
1.4 CNN-BiGRU-RF诊断模型设计
传统CNN网络对于时间特征利用不充分,以及Softmax分类层仅对最终分类结果做一次符合概率分布的操作,导致分类效果不理想,无法进一步提高故障分类精度[15]。因此文中将CNN网络与BiGRU网络对轴承特征深层次的提取能力和RF分类器针对小样本较好的分类效果相结合,提出一种CNN-BiGRU-RF深度学习模型用于轴承故障诊断。
模型结构如图2所示,它由两层卷积与池化交替,可实现轴承数据空间特征深层次的提取与降维,其中考虑到输入的轴承数据为一维时序信号,卷积层采用不同尺寸的卷积核,以便于提取轴承更多的特征信息;再经BiGRU层进一步提取时间序列上的特征信息,为了避免BiGRU层发生过拟合现象,引入Dropout技术,保证输出稀疏度;然后采用全连接层实现特征的展平操作,作为RF分类器的输入特征向量;最后利用RF分类器实现故障分类。模型结构相关参数设置如表1所示。
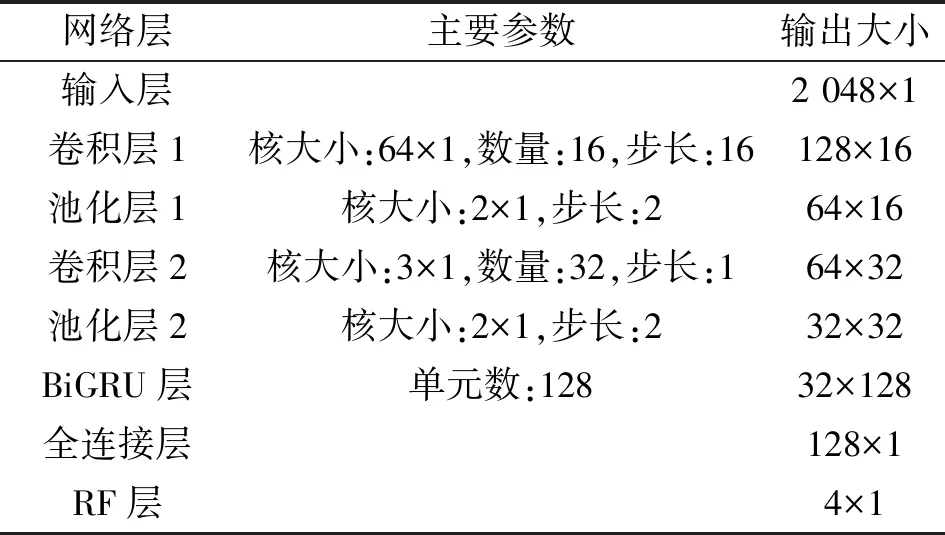
表1 模型参数设置
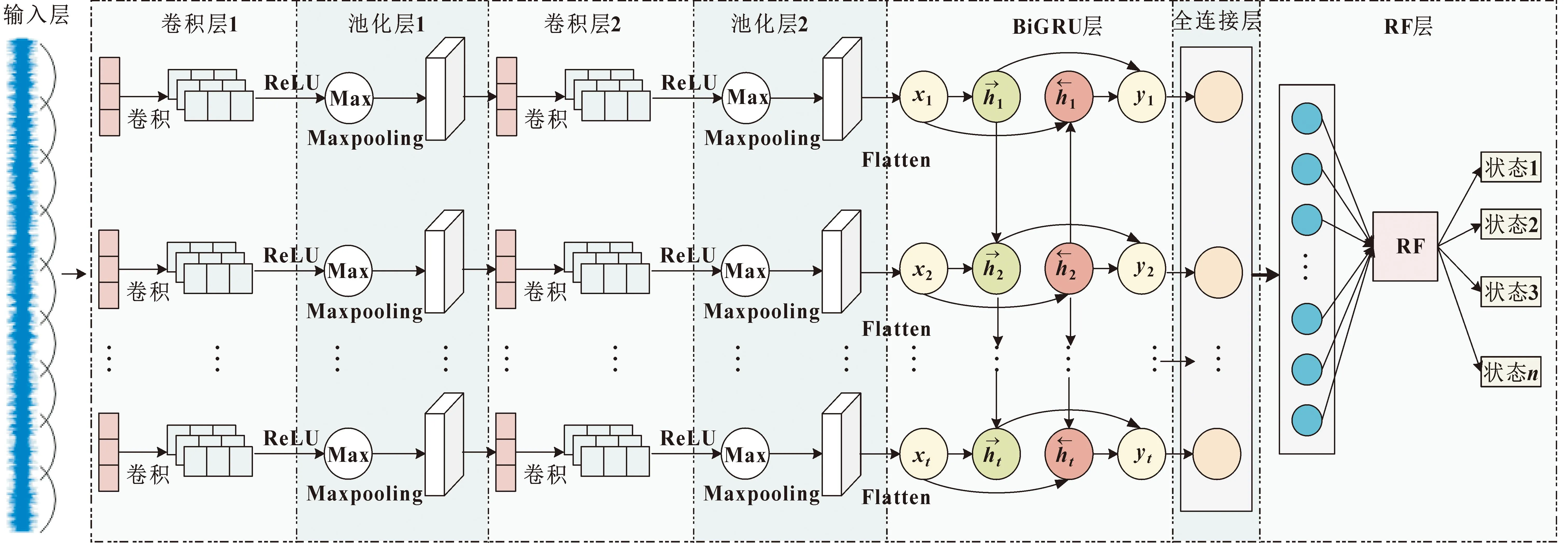
图2 CNN-BiGRU-RF结构
2 CNN-BiGRU-RF迁移诊断流程
迁移学习主要利用源域的有标签且充足的数据建立一个学习模型,将源域学习知识迁移至目标域,实现目标域无标签数据分类[16]。因此,在负样本稀少的情况下,引入迁移学习对于矿井通风机轴承故障诊断具有很好的适用性。
文中将CNN-BiGRU-RF深度学习模型与迁移学习结合,提出一种基于深度迁移学习的矿井通风机轴承故障诊断方法,其迁移诊断框架如图3所示,具体诊断流程如下:
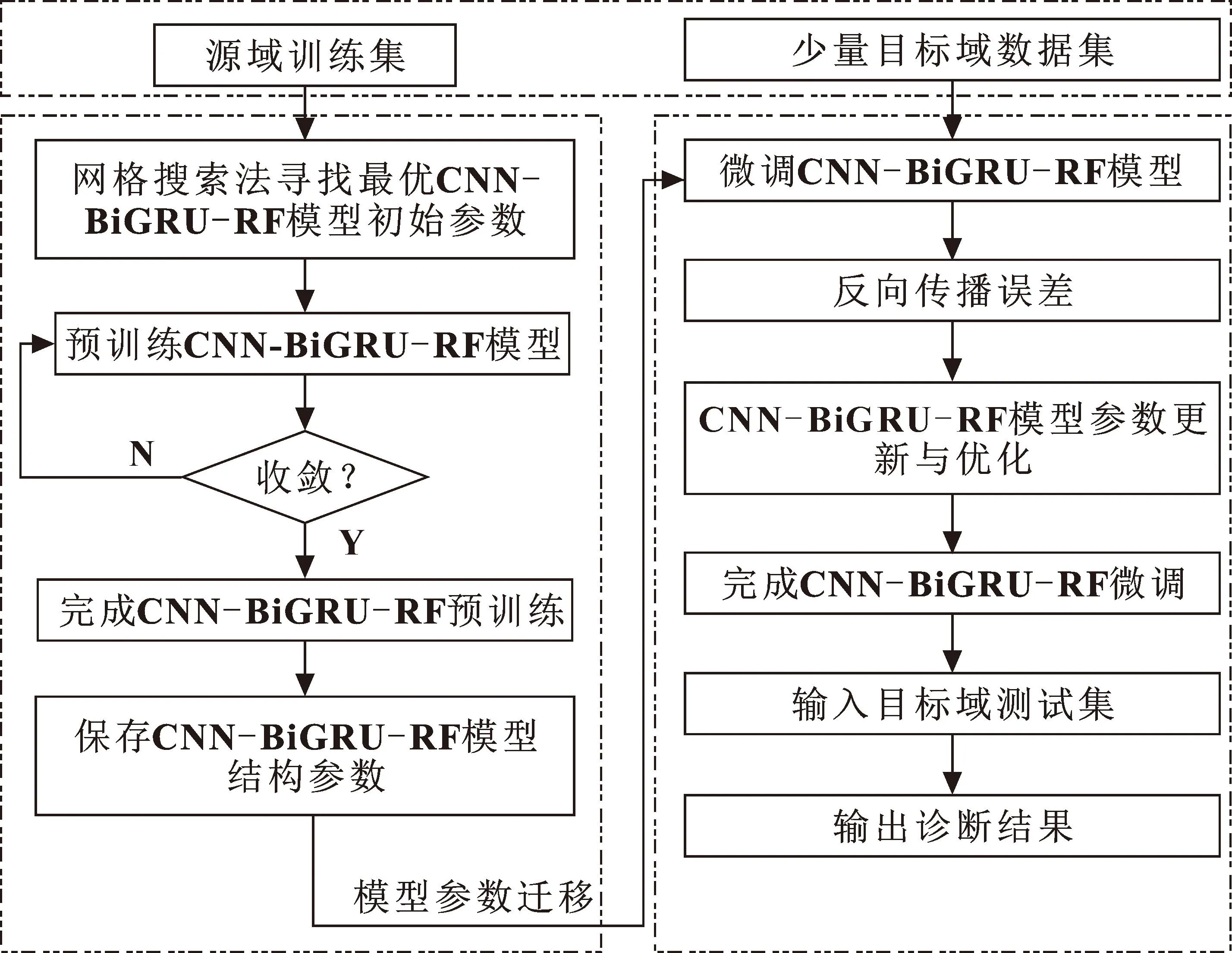
图3 迁移诊断框架
(1)源域数据预训练模型。对数据进行批量分割处理,构建数据样本,按照一定比例随机划分为训练集和测试集。将源域数据训练集输入到CNN-BiGRU-RF模型中,使用网格搜索法寻找模型最优初始参数,并通过CNN层自提取轴承数据空间特征、BiGRU层学习轴承数据时间特征、RF分类器进行故障分类。训练期间采用时序反向传播算法(Back Propagation Through Time,BPTT)随时间反向更新模型参数,直至预训练完毕,保存预训练模型参数,为下一步的模型迁移做准备。
(2)目标域数据微调模型。将预训练模型参数迁移至目标域模型中,冻结CNN层及BiGRU层参数,即CNN层及BiGRU层参数不随迭代训练而改变。然后利用少量目标域有标签数据输入预训练模型中,对模型全连接层及分类层的参数进行微调,通过BPTT算法反向更新模型结构参数,减少模型对目标域数据诊断的误差。经目标域数据微调完成后,保存微调后的模型参数。
(3)测试模型分类效果。经目标域数据微调后的模型已经具备对无标签目标域数据分类识别的能力。将目标域的测试集输入到微调后的模型中,经RF分类器进行故障分类,通过输出结果验证模型对于目标域样本的故障诊断性能。
3 实验验证与结果分析
实验基于PyCharm 2020.1.2中的PyTorch框架,硬件环境CPU为i7-12700F,GPU为Nvidia GeForce RTX 2080 @8GB GDDR6。首先,利用MATLAB对轴承数据进行降噪和预处理;然后,将处理好的数据输入到模型中,使用GPU加速训练。
3.1 数据集来源
源域数据集来源于美国凯斯西储大学滚动轴承试验台,分别在0、735、1 470 W工况下获取驱动端轴承振动数据,表示为数据集A、B、C,每个数据集均包括内圈、外圈、滚动体故障以及正常状态4种类型的样本,取2 048个数据点作为一个样本长度,各状态均有1 000组样本,共有4 000组,按照8∶2划分训练集和测试集。
目标域数据表示为数据集D,来源于淮南丁集煤矿通风机,现场实验如图4所示。在矿井通风机长期运行过程中,获取通风机轴承正常状态、内圈故障、外圈故障及滚动体故障等4种轴承数据,所有故障数据均在询问现场工作人员后划分。矿井通风机运行环境复杂,设备所采集的数据中会含有大量噪声,采用小波包对采集的数据进行分解和重构,以达到滤除环境噪声的目的。因矿井通风机轴承故障样本有限,采用时间重叠式数据扩容技术,增加样本数量,使得矿井通风机轴承每种状态下各有100组样本,共400个。
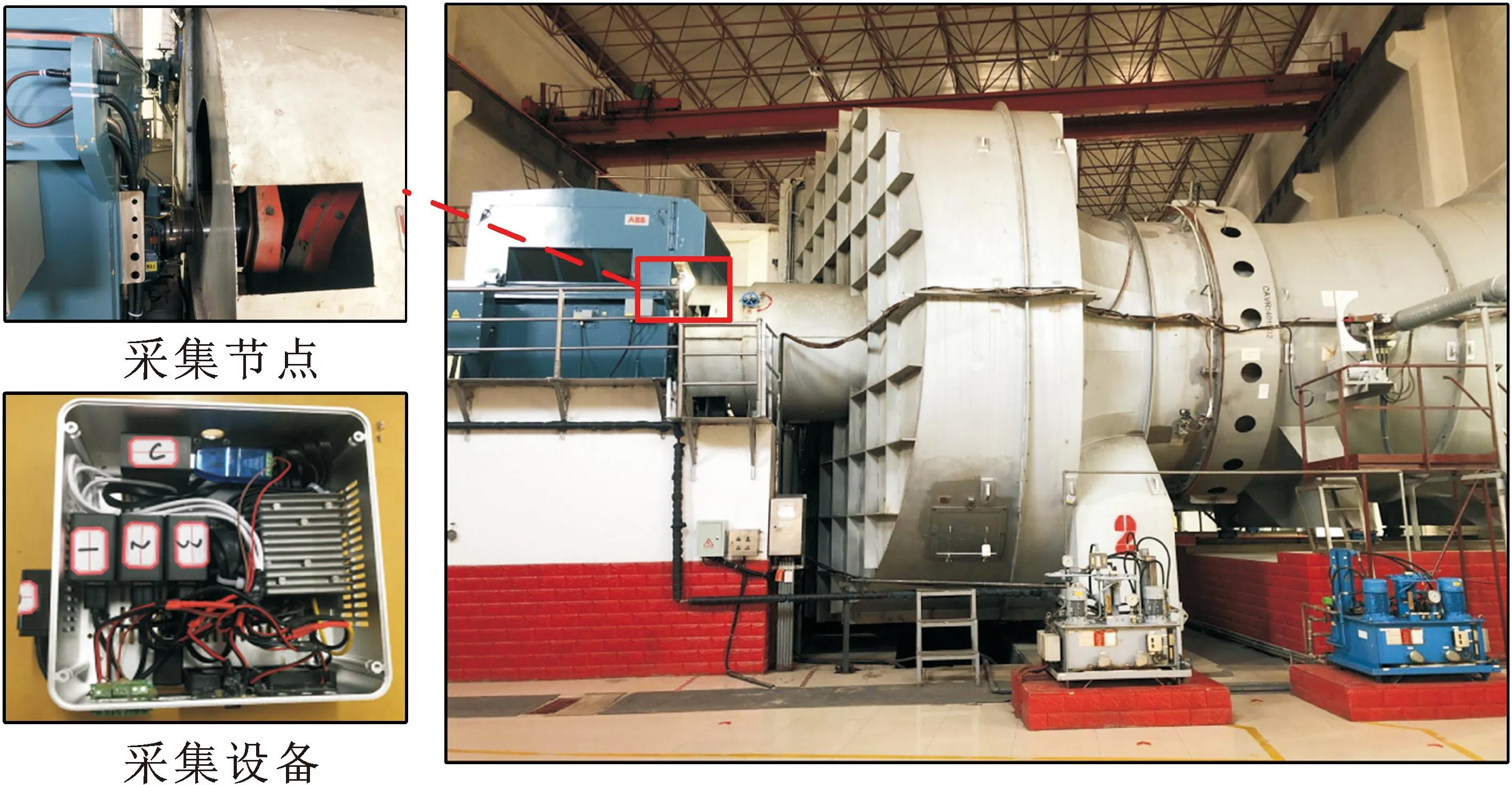
图4 矿井通风机现场实验
3.2 迁移诊断结果分析
模型训练时迭代次数设置为120次,选择Adam作为优化器,学习率设置为0.01,批次为16,Dropout设置为0.5。目标域数据集D按照8∶2划分训练集与测试集,对CNN-BiGRU-RF模型进行训练和测试,诊断准确率如图5所示。可以看出:模型在测试集上的平均识别率仅65.03%,存在识别率低且不稳定的情况,说明在目标域负样本稀少情况下,重新训练深度学习模型,难以实现高精度的故障诊断。

图5 目标域数据集直接训练模型的诊断准确率
以源域数据集A迁移至目标域数据集D(A→D)为例,先利用源域数据集A预训练CNN-BiGRU-RF模型,再使用预训练模型分别对目标域数据集D进行不迁移故障诊断实验和迁移故障诊断实验。以目标域数据集D各状态下20%的样本微调模型,剩余样本用来测试模型的诊断准确率,诊断结果如图6所示。可以看出:未引入迁移学习的模型在测试集上的准确率仅78.82%,而引入迁移学习的模型的准确率为94.41%,诊断准确率提高了15%左右。说明当源域数据与目标域数据之间存在分布差异时,将源域数据预训练的模型直接运用到目标域进行故障诊断,分类效果会受到很大影响,导致诊断准确率低于引入迁移学习模型的诊断准确率。
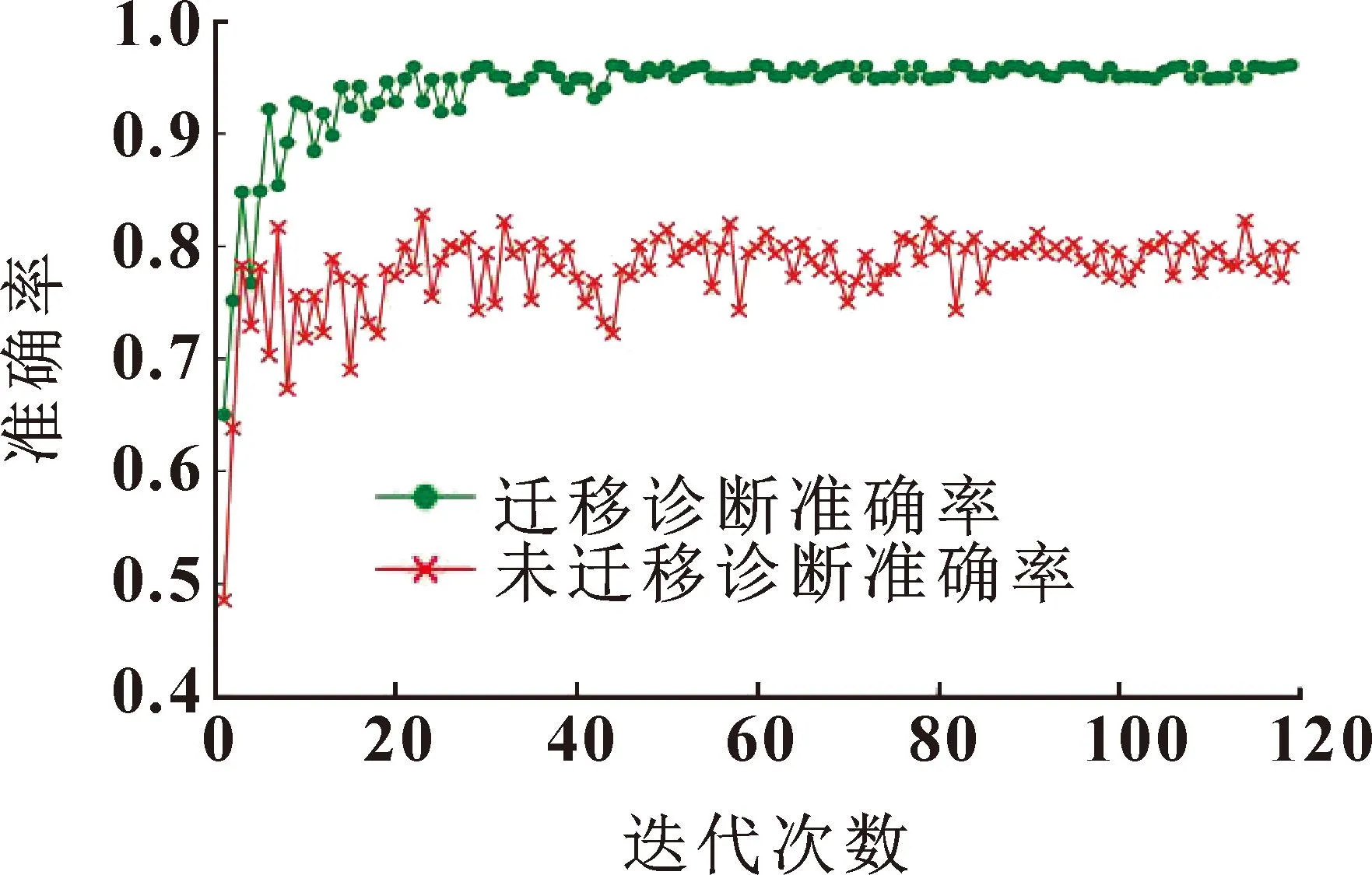
图6 迁移与未迁移方法在目标域测试集上准确率
混淆矩阵能更加直观表现不同故障被错分的数量和类型。在目标域测试集上引入迁移学习模型,诊断结果的混淆矩阵如图7所示。可以看出:对正常状态的识别精度可以达到100%,对外圈故障的识别率也可以达到98.75%,仅内圈故障识别率最低,其中有10个样本被错误识别。说明迁移诊断模型总体分类效果良好,诊断识别率较高。
因此,上述诊断结果说明引入迁移学习的诊断方法能有效解决深度学习模型因缺乏大量训练样本导致故障诊断准确率低的限制,使用少量目标域有标签数据微调的模型也具有较高的诊断准确率。
3.3 迁移诊断模型对比分析
为了测试迁移诊断模型对于矿井通风机轴承故障识别精度与稳定性,将它与TL+CNN模型、TL+CNN-BiGRU模型进行对比分析。同样以A→D为例,先以源域数据集A训练模型,然后以目标域数据集D中20%样本微调模型,剩余样本用来测试模型的诊断准确率,各模型在目标域测试集上的准确率如图8所示。
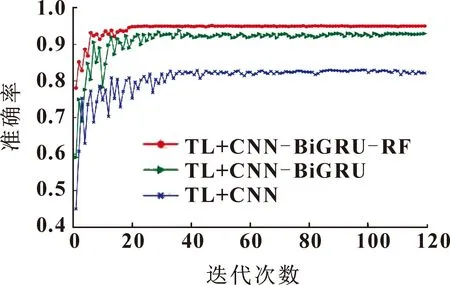
图8 各模型在目标域测试集上的准确率
由图8对比分析可知:随着迭代次数的增加,3种模型的诊断准确率均趋于平稳,但文中所提模型相较于TL+CNN模型和TL+CNN-BiGRU模型准确率更高且上升速度更快,20个迭代次数后,目标域测试集上的准确率就达到了94.89%,并在之后的训练中趋于平稳且无明显波动。
为了验证文中迁移诊断模型的泛化能力,分别使用源域不同工况数据集迁移到目标域进行诊断,为了避免偶然性,每种方法均进行10次随机实验,3种模型的诊断准确率如表2所示。

表2 不同诊断模型准确率对比
由表2可以看出:TL+CNN模型、TL+CNN-BiGRU模型在源域不同工况数据集迁移到目标域时诊断准确率并不稳定,而TL+CNN-BiGRU-RF模型的平均诊断准确率均保持在94%以上,优于其他2种模型,尤其在B→D的迁移诊断中,识别准确率达到了95.27%,证明文中所提模型能够运用于矿井通风机轴承的故障诊断中,与其他模型相比具有更好的泛化能力和更高的诊断精度。
4 结论
(1)结合CNN网络、BiGRU网络和RF分类器各自优势设计了CNN-BiGRU-RF模型,提取了矿井通风机轴承更深层次、更全面的故障特征。
(2)基于CNN-BiGRU-RF模型引入迁移学习,利用轴承数据之间的相似性在目标域训练模型共享参数,再使用少量目标域数据微调模型参数,使模型参数满足目标域数据分类需求,完成了矿井通风机轴承负样本稀少条件下的高精度故障诊断。
(3)通过实验对比验证,在矿井通风机轴承故障诊断中,基于CNN-BiGRU-RF的迁移诊断模型相较于其他诊断模型具备更高的诊断精度与稳定性。
猜你喜欢
健康之家(2021年19期)2021-05-23 11:17:39
医学食疗与健康(2021年27期)2021-05-13 18:46:23
农业科技与信息(2021年2期)2021-03-27 07:27:38
中国交通信息化(2018年5期)2018-08-21 03:37:40
电子测试(2018年1期)2018-04-18 11:52:35
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
电测与仪表(2014年15期)2014-04-04 12:05:20
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
